17 KiB
MECHATRONICS APPROACH FOR THE DEVELOPMENT OF A NANO-ACTIVE-STABILIZATION-SYSTEM
ABSTRACT ignore
With the growing number of fourth generation light sources, there is an increased need of fast positioning end-stations with nanometric precision. Such systems are usually including dedicated control strategies, and many factors may limit their performances. In order to design such complex systems in a predictive way, a mechatronic design approach also known as "model based design", may be utilized. In this paper, we present how this mechatronic design approach was used for the development of a nano-hexapod for the ESRF ID31 beamline. The chosen design approach consists of using models of the mechatronic system (including sensors, actuators and control strategies) to predict its behavior. Based on this behavior and closed-loop simulations, the elements that are limiting the performances can be identified and re-designed accordingly. This allows to make adequate choices concerning the design of the nano-hexapod and the overall mechatronic architecture early in the project and save precious time and resources. Several test benches were used to validate the models and to gain confidence on the predictability of the final system's performances. Measured nano-hexapod's dynamics was shown to be in very good agreement with the models. Further tests should be done in order to confirm that the performances of the system match the predicted one. The presented development approach is foreseen to be applied more frequently to future mechatronic system design at the ESRF.
INTRODUCTION
Establish Significance ignore
Previous and/or current research and contributions ignore
Locate a gap in the research / problem / question / prediction ignore
Such mechatronic approach is widely used in the dutch industry cite:rankers98_machin and much less in the Synchrotron's world.
The present work ignore
In this paper, is presented how the mechatronic approach is used for the development of a nano active stabilization system.
cite:dehaeze21_activ_dampin_rotat_platf_using cite:souleille18_concep_activ_mount_space_applic cite:brumund21_multib_simul_reduc_order_flexib_bodies_fea cite:dehaeze18_sampl_stabil_for_tomog_exper cite:schmidt20_desig_high_perfor_mechat_third_revis_edition
NASS - MECHATRONIC APPROACH
The ID31 Micro Station
The ID31 Micro Station is used to position samples along complex trajectories cite:dehaeze18_sampl_stabil_for_tomog_exper. It is composed of several stacked stages (represented in yellow in Fig. ref:fig:nass_concept_schematic). This allows this station to have high mobility, however, this limits the position accuracy to tens of $\mu m$.
The Nano Active Stabilization System
The Nano Active Stabilization System (NASS) is a system whose goal is to improve the positioning accuracy of the ID31 Micro Station.
It is represented in Fig. ref:fig:nass_concept_schematic and consists of three main elements:
- a nano-hexapod located between the sample to be positioned and the micro-station.
- a interferometric metrology system measuring the sample's position with respect to the focusing optics
- a control system (not represented), which base on the measured position, properly actuates the nano-hexapod in order to stabilize the sample's position
Mechatronic Approach - Overview
In order to design the NASS in a predictive way, a mechatronic approach, schematically represented in Fig. ref:fig:nass_mechatronics_approach, is used.
It consists of three main phases:
- Conceptual phase: Simple models of both the micro-station and the nano-hexapod are used to first evaluate the performances of several concepts. During this phase, the type of sensors to use and the approximate required dynamical characteristics of the nano-hexapod are determined.
- Detail design phase: Once the concept is validated, the models are used to list specifications both for the mechanics and the instrumentation. Each critical elements can then be properly designed. The models are updated as the design progresses.
- Experimental phase: Once the design is completed and the parts received, several test benches are used to verify the properties of the key elements. Then the hexapod can be mounted and fully tested with the instrumentation and the control system.
Models
As shown in Fig. ref:fig:nass_mechatronics_approach, the models are at the core of the mechatronic approach. Not only one, but several models are used throughout the design with increasing level of complexity (Fig. {fig:nass_models}).
At the beginning of the conceptual phase, simple "mass-spring-dampers" models (Fig. ref:fig:mass_spring_damper_hac_lac) are used in order to evaluate the performances of different concepts. Based on this model, it has been concluded that a nano-hexapod with low frequency "suspension" modes would help both for the reduction of the effects of several disturbances and for the decoupling between the nano-hexapod dynamics and the complex micro-station dynamics. This will greatly help simplifying the control.
Rapidly, a more sophisticated multi-body model (Fig. ref:fig:nass_simscape_3d) has been used. This model is based on the 3D representation of the micro-station as well as on extensive dynamical measurements. Time domain simulations can then be performed where each stage is moving with the associated positioning errors and disturbances. The multi-input multi-output control strategy can be developed and tested.
During the detail design phase, the nano-hexapod model is updated by importing the 3D parts exported from the CAD software. The key elements of the nano-hexapod such as the flexible joints and the APA are optimized using a Finite Element Software. As the flexible modes of the system are what generally limit the controller bandwidth, they are important to model in order to understand which are problematic and which are to be maximized. In order to do so, a "super-element" can be exported and imported in Simscape (Fig. ref:fig:super_element_simscape). Such process is described in cite:brumund21_multib_simul_reduc_order_flexib_bodies_fea.
Finally, during the experimental phase, the models are refined using experimental system identification. The models are still very useful to understand the measurements and the associated performance limitations. They are used to have a better insight on which measures to take in order to overcome the current limitations.
For instance, it has been found that when fixing encoders to the struts (Fig. ref:fig:nano_hexapod_elements), several flexible modes of the APA were appearing the dynamics which render the control using the encoders very complex. Therefore, an alternative configuration with the encoders fixed to the plates instead was used.
NANO-HEXAPOD DESIGN
Nano-Hexapod Specifications
A CAD view of the nano-hexapod is shown in Fig. ref:fig:nano_hexapod_elements. It is composed of 6 struts fixed in between two plates. Each strut is composed of one flexible joints at each end, and one actuator (Fig. ref:fig:picture_nano_hexapod_strut). ). And encoder can be fixed to the struts as shown, but can also be directly fixed to the plates (not represented here).
Basic specifications:
- Limited height (95mm)
- Stroke $\approx 100\,\mu m$
- Load up to $50\,kg$
Based on the models used throughout the mechatronic approach, several specifications was obtained in order to maximize the performances of the system:
- Axial stiffness of the struts $\approx 2\,\mu m/N$ such that the nano-hexapod dynamics is insensible to the rotation as well as decoupled from the micro-station dynamics
- Small bending stiffness and high axial stiffness of the flexible joints
- Precise positioning of the $b_i$ and $\hat{s}_i$
- Flexible modes of the top-plate as high as possible
- Integration of a force sensor for active damping purposes (more in the next section)
Parts' Optimization
- APA / Flexible Joints / Plates
The flexible joints and the top plates have been optimize using a Finite Element Model combine with the multi-body model of the nano-hexapod.
The actuators are APA300ML from Cedrat Technologies. Three stacks: two as actuator one as sensor
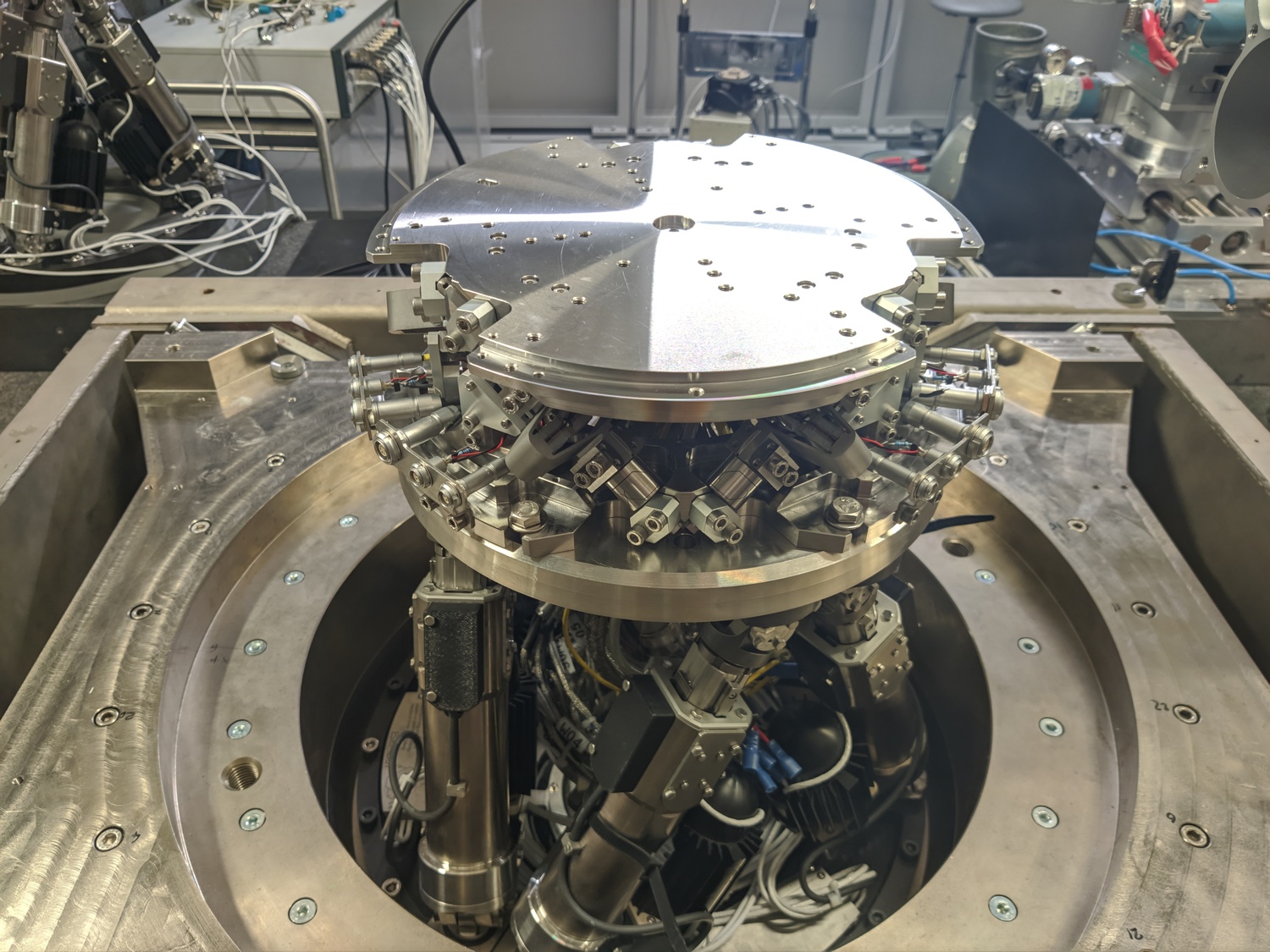
Mounted Nano-Hexapod
- Mounting benches
TEST-BENCHES
Flexible Joints and Instrumentation
APA/Struts Dynamics
Several test benches were used for all the critical elements of the nano-hexapod. For instant, the bending stiffness of the flexible joints are measured, and the model is refined. The measurement noise of the encoders are also measured, and the input/output relationship and the output voltage noise of the voltage amplifiers are measured.
Perhaps the most important test bench was the one used to identify the dynamics of the amplified piezoelectric actuator (shown in Fig. ref:fig:test_bench_apa_schematic). It consist of a $5\,\text{kg}$ granite vertical guided with an air bearing and fixed on top of the APA. An excitation signal (low pass filtered white noise) is generated and applied to two of the piezoelectric stacks. Both the voltage generated by the third piezoelectric stack and the displacement measured by the encoder are recorded. The two obtained FRF can then be compared with the model and the piezoelectric constant are identified. These constants are used to do the conversion from the mechanical domain (force, strain) easily accessible on the model to the electrical domain (voltages, charges) easily measured. After identification of these constant, the match between the measured FRF and the model dynamics is quite good (Fig. ref:fig:apa_test_bench_results)
The same bench was also used with the struts in order to study the effects of the flexible joints.
Nano-Hexapod
CONCLUSION
ACKNOWLEDGMENTS
This research was made possible by a grant from the FRIA. We thank the following people for their support, without whose help this work would never have been possible: V. Honkimaki, L. Ducotte and M. Lessourd and the whole team of the Precision Mechatronic Laboratory.
REFERENCES ignore
\printbibliography{}