22 KiB
22 KiB
Test Bench APA95ML
- Introduction
- Huddle Test
- Identification of the dynamics from actuator to displacement
- Identification of the dynamics from actuator to force sensor
- Integral Force Feedback
Introduction ignore
Huddle Test
<<sec:huddle_test>>
Introduction ignore
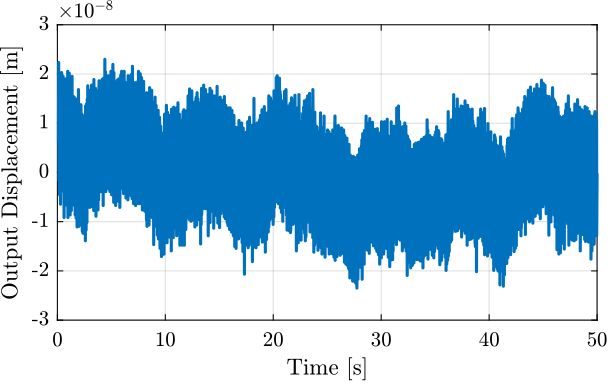
Time Domain Data
PSD of Measurement Noise
Ts = t(end)/(length(t)-1);
Fs = 1/Ts;
win = hanning(ceil(1*Fs)); [pxx, f] = pwelch(y(1000:end), win, [], [], Fs);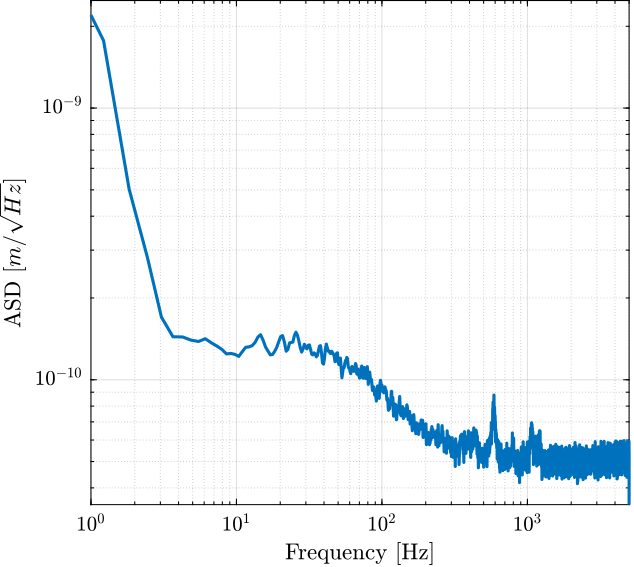
Identification of the dynamics from actuator to displacement
<<sec:motion_identification>>
Introduction ignore
Load Data
ht = load('huddle_test.mat', 't', 'u', 'y');
load('apa95ml_5kg_Amp_E505.mat', 't', 'u', 'um', 'y'); u = 10*(u - mean(u)); % Input Voltage of Piezo [V]
um = 10*(um - mean(um)); % Monitor [V]
y = y - mean(y); % Mass displacement [m]
ht.u = 10*(ht.u - mean(ht.u));
ht.y = ht.y - mean(ht.y);Comparison of the PSD with Huddle Test
Ts = t(end)/(length(t)-1);
Fs = 1/Ts;
win = hanning(ceil(1*Fs)); [pxx, f] = pwelch(y, win, [], [], Fs);
[pht, ~] = pwelch(ht.y, win, [], [], Fs);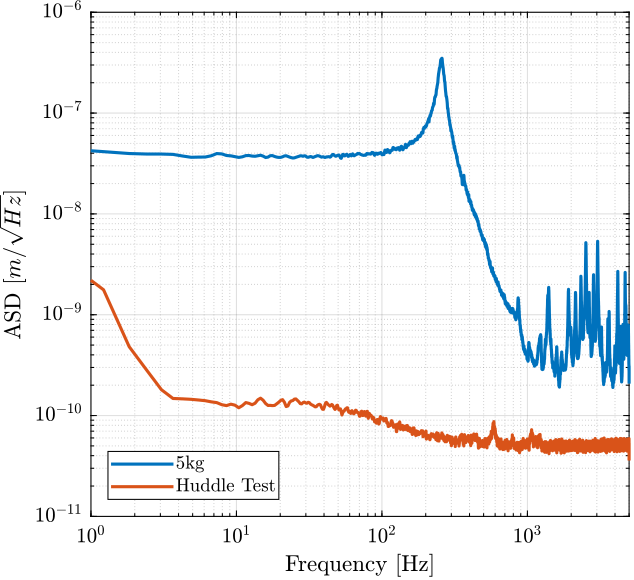
Compute TF estimate and Coherence
Ts = t(end)/(length(t)-1);
Fs = 1/Ts; win = hann(ceil(1/Ts));
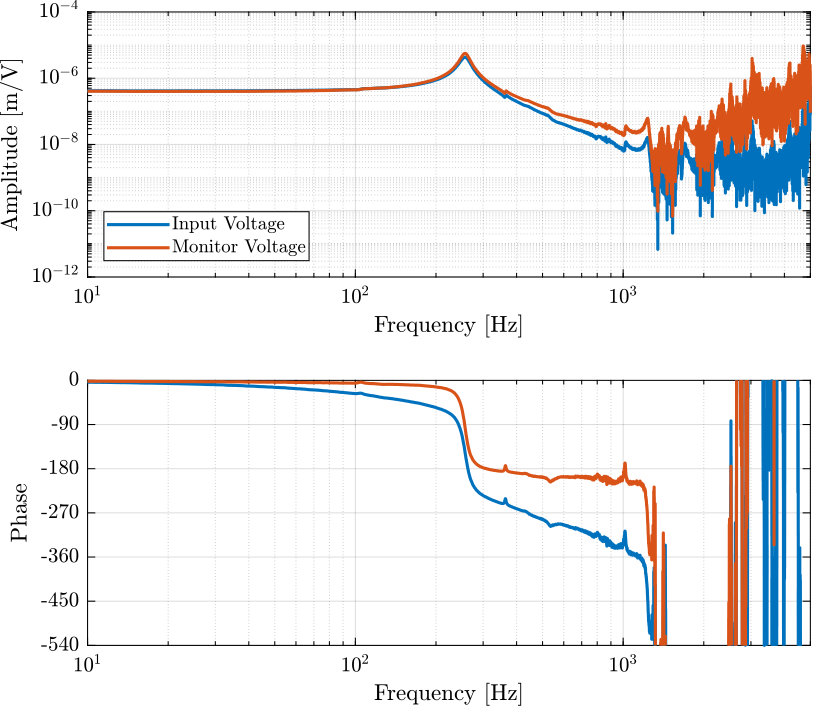
[tf_est, f] = tfestimate(u, -y, win, [], [], 1/Ts);
[tf_um , ~] = tfestimate(um, -y, win, [], [], 1/Ts);
[co_est, ~] = mscohere( um, -y, win, [], [], 1/Ts);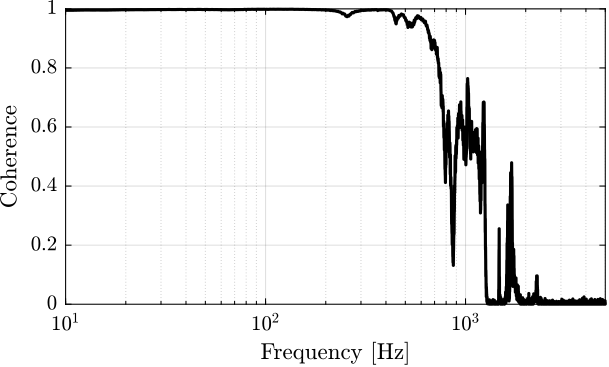
Comparison with the FEM model
load('fem_model_5kg.mat', 'G');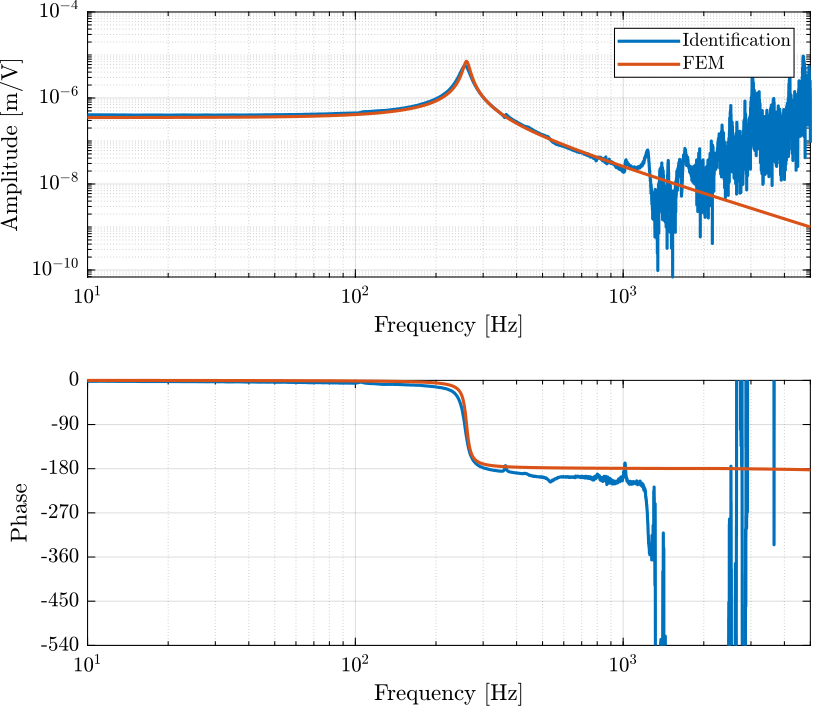
Identification of the dynamics from actuator to force sensor
<<sec:force_sensor_identification>>
Introduction ignore
Two measurements are performed:
- Speedgoat DAC => Voltage Amplifier (x20) => 1 Piezo Stack => … => 2 Stacks as Force Sensor (parallel) => Speedgoat ADC
- Speedgoat DAC => Voltage Amplifier (x20) => 2 Piezo Stacks (parallel) => … => 1 Stack as Force Sensor => Speedgoat ADC
The obtained dynamics from force actuator to force sensor are compare with the FEM model.
Load Data ignore
The data are loaded:
a_ss = load('apa95ml_5kg_1a_2s.mat', 't', 'u', 'y', 'v');
aa_s = load('apa95ml_5kg_2a_1s.mat', 't', 'u', 'y', 'v');
load('G_force_sensor_5kg.mat', 'G');Adjust gain ignore
Let's use the amplifier gain to obtain the true voltage applied to the actuator stack(s)
The parameters of the piezoelectric stacks are defined below:
d33 = 3e-10; % Strain constant [m/V]
n = 80; % Number of layers per stack
eT = 1.6e-8; % Permittivity under constant stress [F/m]
sD = 2e-11; % Elastic compliance under constant electric displacement [m2/N]
ka = 235e6; % Stack stiffness [N/m]From the FEM, we construct the transfer function from DAC voltage to ADC voltage.
Gfem_aa_s = exp(-s/1e4)*20*(2*d33*n*ka)*(G(3,1)+G(3,2))*d33/(eT*sD*n);
Gfem_a_ss = exp(-s/1e4)*20*( d33*n*ka)*(G(3,1)+G(2,1))*d33/(eT*sD*n);Compute TF estimate and Coherence ignore
The transfer function from input voltage to output voltage are computed and shown in Figure fig:bode_plot_force_sensor_voltage_comp_fem.
Ts = a_ss.t(end)/(length(a_ss.t)-1);
Fs = 1/Ts;
win = hann(ceil(10/Ts));
[tf_a_ss, f] = tfestimate(a_ss.u, a_ss.v, win, [], [], 1/Ts);
[coh_a_ss, ~] = mscohere( a_ss.u, a_ss.v, win, [], [], 1/Ts);
[tf_aa_s, f] = tfestimate(aa_s.u, aa_s.v, win, [], [], 1/Ts);
[coh_aa_s, ~] = mscohere( aa_s.u, aa_s.v, win, [], [], 1/Ts);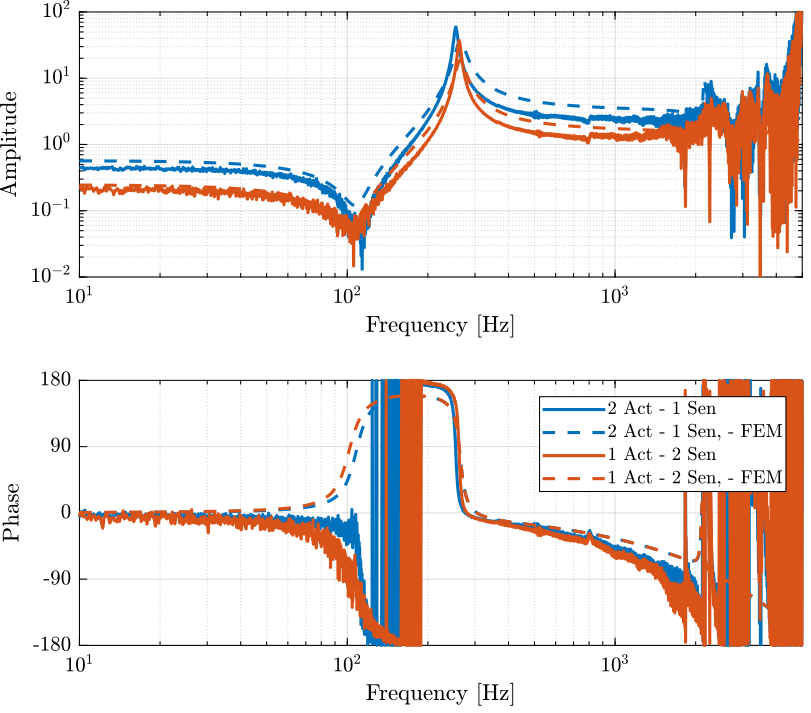
System Identification
w_z = 2*pi*111; % Zeros frequency [rad/s]
w_p = 2*pi*255; % Pole frequency [rad/s]
xi_z = 0.05;
xi_p = 0.015;
G_inf = 2;
Gi = G_inf*(s^2 - 2*xi_z*w_z*s + w_z^2)/(s^2 + 2*xi_p*w_p*s + w_p^2);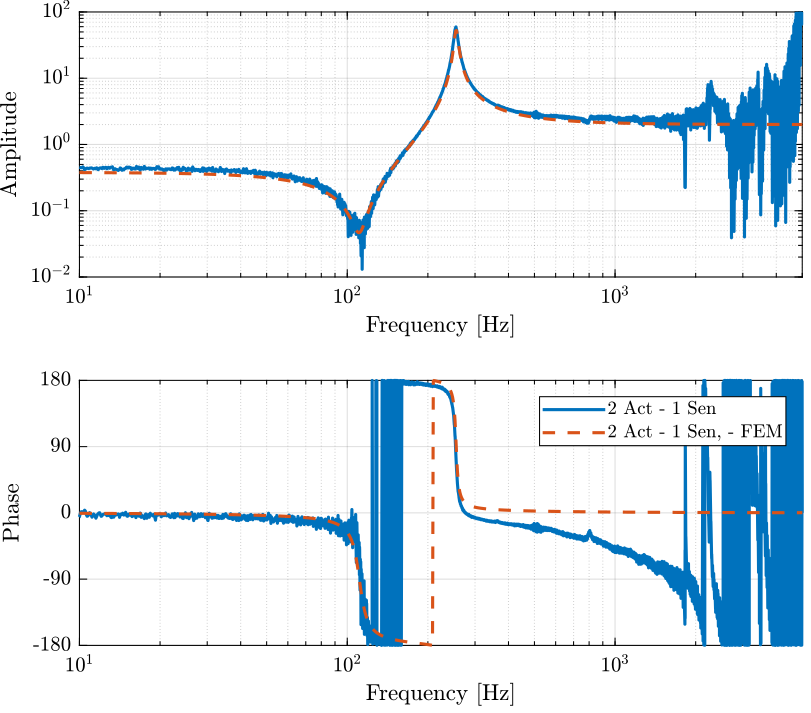
Integral Force Feedback
Integral Force Feedback
<<sec:integral_force_feedback>>
Introduction ignore
First tests with few gains
iff_g10 = load('apa95ml_iff_g10_res.mat', 'u', 't', 'y', 'v');
iff_g100 = load('apa95ml_iff_g100_res.mat', 'u', 't', 'y', 'v');
iff_of = load('apa95ml_iff_off_res.mat', 'u', 't', 'y', 'v'); Ts = 1e-4;
win = hann(ceil(10/Ts));
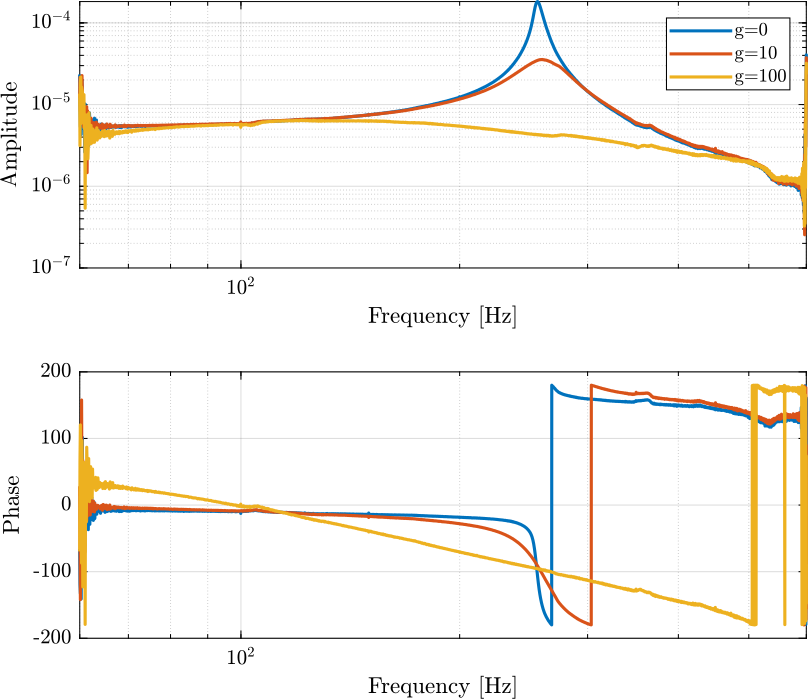
[tf_iff_g10, f] = tfestimate(iff_g10.u, iff_g10.y, win, [], [], 1/Ts);
[co_iff_g10, ~] = mscohere(iff_g10.u, iff_g10.y, win, [], [], 1/Ts);
[tf_iff_g100, f] = tfestimate(iff_g100.u, iff_g100.y, win, [], [], 1/Ts);
[co_iff_g100, ~] = mscohere(iff_g100.u, iff_g100.y, win, [], [], 1/Ts);
[tf_iff_of, ~] = tfestimate(iff_of.u, iff_of.y, win, [], [], 1/Ts);
[co_iff_of, ~] = mscohere(iff_of.u, iff_of.y, win, [], [], 1/Ts);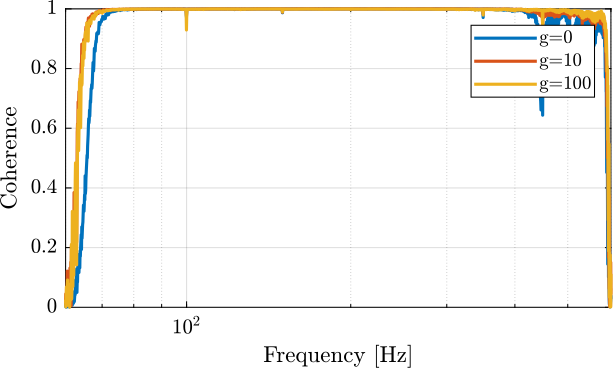
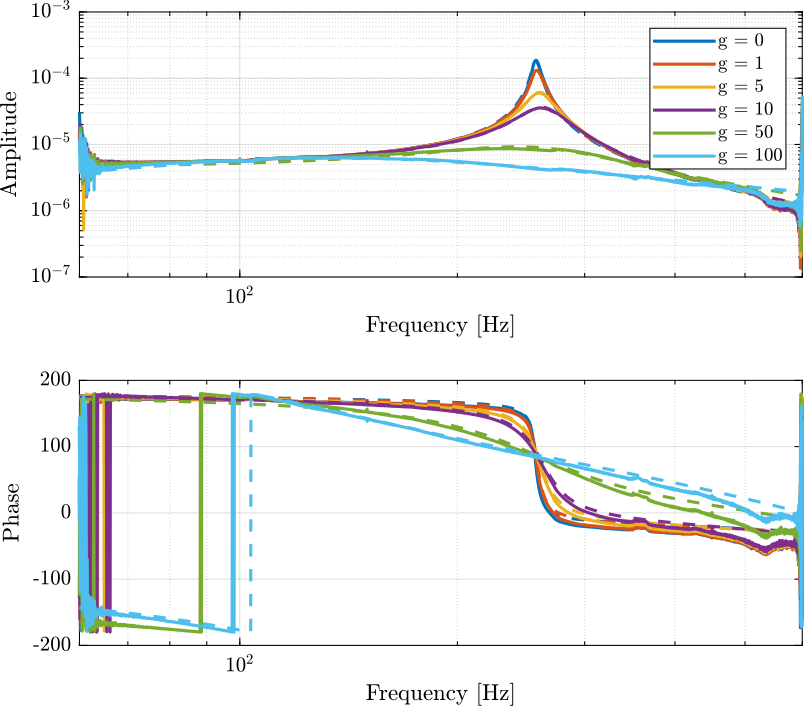
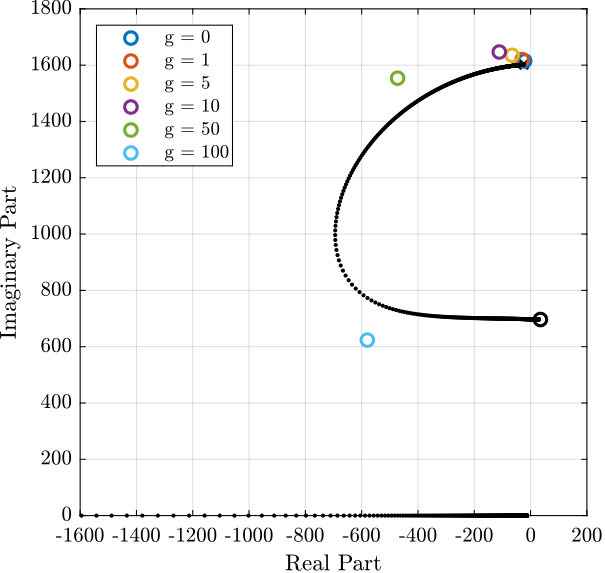
Second test with many Gains
load('apa95ml_iff_test.mat', 'results'); Ts = 1e-4;
win = hann(ceil(10/Ts)); tf_iff = {zeros(1, length(results))};
co_iff = {zeros(1, length(results))};
g_iff = [0, 1, 5, 10, 50, 100];
for i=1:length(results)
[tf_est, f] = tfestimate(results{i}.u, results{i}.y, win, [], [], 1/Ts);
[co_est, ~] = mscohere(results{i}.u, results{i}.y, win, [], [], 1/Ts);
tf_iff(i) = {tf_est};
co_iff(i) = {co_est};
end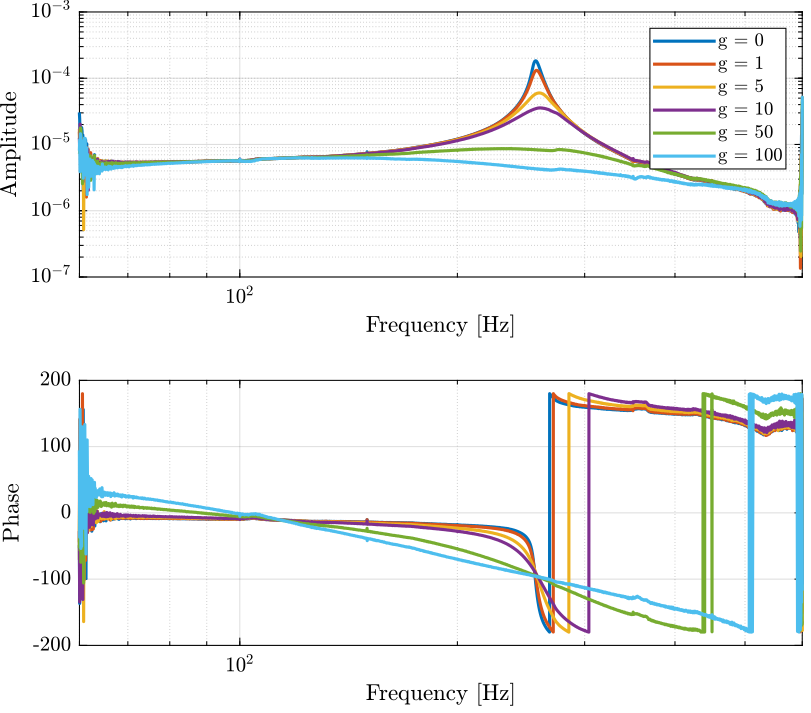
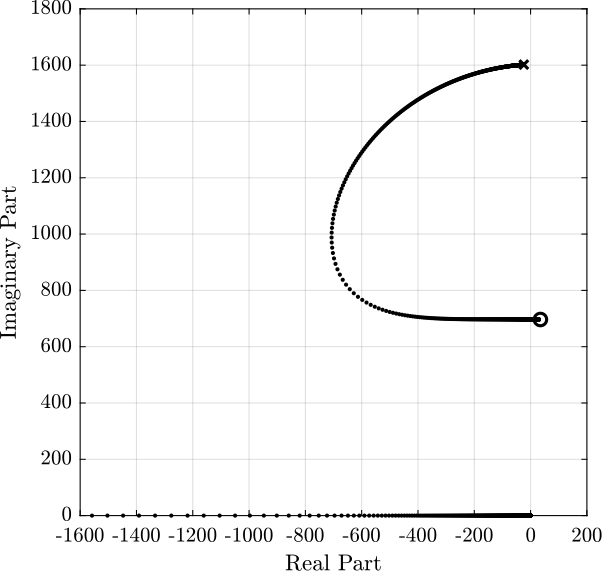
G_id = {zeros(1,length(results))};
f_start = 70; % [Hz]
f_end = 500; % [Hz]
for i = 1:length(results)
tf_id = tf_iff{i}(sum(f<f_start):length(f)-sum(f>f_end));
f_id = f(sum(f<f_start):length(f)-sum(f>f_end));
gfr = idfrd(tf_id, 2*pi*f_id, Ts);
G_id(i) = {procest(gfr,'P2UDZ')};
end