15 KiB
Stewart Platform - Simscape Model
- Function description and arguments
- Initialization of the stewart structure
- Bottom Plate
- Top Plate
- Legs
- Ball Joints
- More parameters are initialized
- Save the Stewart Structure
- initializeParameters Function
- initializeSample
Function description and arguments
The initializeHexapod function takes one structure that contains configurations for the hexapod and returns one structure representing the hexapod.
function [stewart] = initializeHexapod(opts_param)Default values for opts.
opts = struct(...
'height', 90, ... % Height of the platform [mm]
'density', 8000, ... % Density of the material used for the hexapod [kg/m3]
'k_ax', 1e8, ... % Stiffness of each actuator [N/m]
'c_ax', 1000, ... % Damping of each actuator [N/(m/s)]
'stroke', 50e-6, ... % Maximum stroke of each actuator [m]
'name', 'stewart' ... % Name of the file
);Populate opts with input parameters
if exist('opts_param','var')
for opt = fieldnames(opts_param)'
opts.(opt{1}) = opts_param.(opt{1});
end
endInitialization of the stewart structure
We initialize the Stewart structure
stewart = struct();And we defined its total height.
stewart.H = opts.height; % [mm]Bottom Plate
The bottom plate structure is initialized.
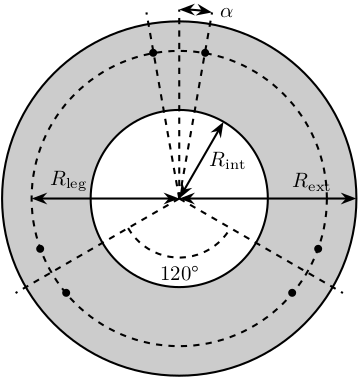
BP = struct();We defined its internal radius (if there is a hole in the bottom plate) and its outer radius.
BP.Rint = 0; % Internal Radius [mm]
BP.Rext = 150; % External Radius [mm]We define its thickness.
BP.H = 10; % Thickness of the Bottom Plate [mm]At which radius legs will be fixed and with that angle offset.
BP.Rleg = 100; % Radius where the legs articulations are positionned [mm]
BP.alpha = 10; % Angle Offset [deg]We defined the density of the material of the bottom plate.
BP.density = opts.density; % Density of the material [kg/m3]And its color.
BP.color = [0.7 0.7 0.7]; % Color [RGB]Then the profile of the bottom plate is computed and will be used by Simscape
BP.shape = [BP.Rint BP.H; BP.Rint 0; BP.Rext 0; BP.Rext BP.H]; % [mm]The structure is added to the stewart structure
stewart.BP = BP;Top Plate
The top plate structure is initialized.
TP = struct();We defined the internal and external radius of the top plate.
TP.Rint = 0; % [mm]
TP.Rext = 100; % [mm]The thickness of the top plate.
TP.H = 10; % [mm]At which radius and angle are fixed the legs.
TP.Rleg = 100; % Radius where the legs articulations are positionned [mm]
TP.alpha = 20; % Angle [deg]
TP.dalpha = 0; % Angle Offset from 0 position [deg]The density of its material.
TP.density = opts.density; % Density of the material [kg/m3]Its color.
TP.color = [0.7 0.7 0.7]; % Color [RGB]Then the shape of the top plate is computed
TP.shape = [TP.Rint TP.H; TP.Rint 0; TP.Rext 0; TP.Rext TP.H];The structure is added to the stewart structure
stewart.TP = TP;Legs
The leg structure is initialized.
Leg = struct();The maximum Stroke of each leg is defined.
Leg.stroke = opts.stroke; % [m]The stiffness and damping of each leg are defined
Leg.k_ax = opts.k_ax; % Stiffness of each leg [N/m]
Leg.c_ax = opts.c_ax; % Damping of each leg [N/(m/s)]The radius of the legs are defined
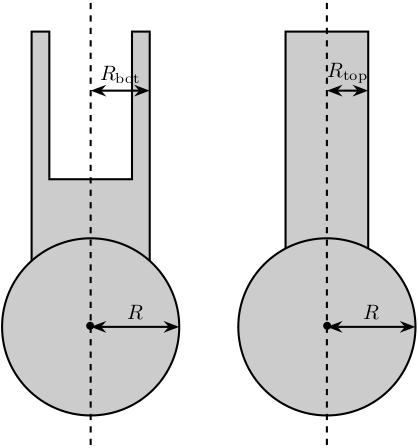
Leg.Rtop = 10; % Radius of the cylinder of the top part of the leg[mm]
Leg.Rbot = 12; % Radius of the cylinder of the bottom part of the leg [mm]The density of its material.
Leg.density = opts.density; % Density of the material used for the legs [kg/m3]Its color.
Leg.color = [0.5 0.5 0.5]; % Color of the top part of the leg [RGB]The radius of spheres representing the ball joints are defined.
Leg.R = 1.3*Leg.Rbot; % Size of the sphere at the extremity of the leg [mm]The structure is added to the stewart structure
stewart.Leg = Leg;Ball Joints
SP is the structure representing the support for the ball joints at the extremity of each leg.
The SP structure is initialized.
SP = struct();We can define its rotational stiffness and damping. For now, we use perfect joints.
SP.k = 0; % [N*m/deg]
SP.c = 0; % [N*m/deg]Its height is defined
SP.H = 15; % [mm]Its radius is based on the radius on the sphere at the end of the legs.
SP.R = Leg.R; % [mm] SP.section = [0 SP.H-SP.R;
0 0;
SP.R 0;
SP.R SP.H];The density of its material is defined.
SP.density = opts.density; % [kg/m^3]Its color is defined.
SP.color = [0.7 0.7 0.7]; % [RGB]The structure is added to the Hexapod structure
stewart.SP = SP;More parameters are initialized
stewart = initializeParameters(stewart);Save the Stewart Structure
save('./mat/stewart.mat', 'stewart')initializeParameters Function
function [stewart] = initializeParameters(stewart)We first compute $[a_1, a_2, a_3, a_4, a_5, a_6]^T$ and $[b_1, b_2, b_3, b_4, b_5, b_6]^T$.
stewart.Aa = zeros(6, 3); % [mm]
stewart.Ab = zeros(6, 3); % [mm]
stewart.Bb = zeros(6, 3); % [mm] for i = 1:3
stewart.Aa(2*i-1,:) = [stewart.BP.Rleg*cos( pi/180*(120*(i-1) - stewart.BP.alpha) ), ...
stewart.BP.Rleg*sin( pi/180*(120*(i-1) - stewart.BP.alpha) ), ...
stewart.BP.H+stewart.SP.H];
stewart.Aa(2*i,:) = [stewart.BP.Rleg*cos( pi/180*(120*(i-1) + stewart.BP.alpha) ), ...
stewart.BP.Rleg*sin( pi/180*(120*(i-1) + stewart.BP.alpha) ), ...
stewart.BP.H+stewart.SP.H];
stewart.Ab(2*i-1,:) = [stewart.TP.Rleg*cos( pi/180*(120*(i-1) + stewart.TP.dalpha - stewart.TP.alpha) ), ...
stewart.TP.Rleg*sin( pi/180*(120*(i-1) + stewart.TP.dalpha - stewart.TP.alpha) ), ...
stewart.H - stewart.TP.H - stewart.SP.H];
stewart.Ab(2*i,:) = [stewart.TP.Rleg*cos( pi/180*(120*(i-1) + stewart.TP.dalpha + stewart.TP.alpha) ), ...
stewart.TP.Rleg*sin( pi/180*(120*(i-1) + stewart.TP.dalpha + stewart.TP.alpha) ), ...
stewart.H - stewart.TP.H - stewart.SP.H];
end
stewart.Bb = stewart.Ab - stewart.H*[0,0,1];Now, we compute the leg vectors $\hat{s}_i$ and leg position $l_i$: \[ b_i - a_i = l_i \hat{s}_i \]
We initialize $l_i$ and $\hat{s}_i$
leg_length = zeros(6, 1); % [mm]
leg_vectors = zeros(6, 3);We compute $b_i - a_i$, and then:
\begin{align*} l_i &= \left|b_i - a_i\right| \\ \hat{s}_i &= \frac{b_i - a_i}{l_i} \end{align*} legs = stewart.Ab - stewart.Aa;
for i = 1:6
leg_length(i) = norm(legs(i,:));
leg_vectors(i,:) = legs(i,:) / leg_length(i);
endThen the shape of the bottom leg is estimated
stewart.Leg.lenght = leg_length(1)/1.5;
stewart.Leg.shape.bot = ...
[0 0; ...
stewart.Leg.Rbot 0; ...
stewart.Leg.Rbot stewart.Leg.lenght; ...
stewart.Leg.Rtop stewart.Leg.lenght; ...
stewart.Leg.Rtop 0.2*stewart.Leg.lenght; ...
0 0.2*stewart.Leg.lenght];We compute rotation matrices to have the orientation of the legs. The rotation matrix transforms the $z$ axis to the axis of the leg. The other axis are not important here.
stewart.Rm = struct('R', eye(3));
for i = 1:6
sx = cross(leg_vectors(i,:), [1 0 0]);
sx = sx/norm(sx);
sy = -cross(sx, leg_vectors(i,:));
sy = sy/norm(sy);
sz = leg_vectors(i,:);
sz = sz/norm(sz);
stewart.Rm(i).R = [sx', sy', sz'];
endCompute Jacobian Matrix
J = zeros(6);
for i = 1:6
J(i, 1:3) = leg_vectors(i, :);
J(i, 4:6) = cross(0.001*(stewart.Ab(i, :)- stewart.H*[0,0,1]), leg_vectors(i, :));
end
stewart.J = J;
stewart.Jinv = inv(J); stewart.K = stewart.Leg.k_ax*stewart.J'*stewart.J; end
endinitializeSample
function [] = initializeSample(opts_param)
%% Default values for opts
sample = struct( ...
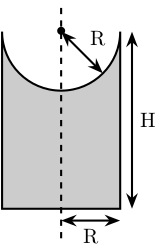
'radius', 100, ... % radius of the cylinder [mm]
'height', 100, ... % height of the cylinder [mm]
'mass', 10, ... % mass of the cylinder [kg]
'measheight', 50, ... % measurement point z-offset [mm]
'offset', [0, 0, 0], ... % offset position of the sample [mm]
'color', [0.9 0.1 0.1] ...
);
%% Populate opts with input parameters
if exist('opts_param','var')
for opt = fieldnames(opts_param)'
sample.(opt{1}) = opts_param.(opt{1});
end
end
%% Save
save('./mat/sample.mat', 'sample');
end