27 KiB
Stewart Platform - Decentralized Active Damping
Introduction ignore
The following decentralized active damping techniques are briefly studied:
- Inertial Control (proportional feedback of the absolute velocity): Section sec:active_damping_inertial
- Integral Force Feedback: Section sec:active_damping_iff
- Direct feedback of the relative velocity of each strut: Section sec:active_damping_dvf
Inertial Control
<<sec:active_damping_inertial>>
Introduction ignore
Identification of the Dynamics
stewart = initializeStewartPlatform();
stewart = initializeFramesPositions(stewart, 'H', 90e-3, 'MO_B', 45e-3);
stewart = generateGeneralConfiguration(stewart);
stewart = computeJointsPose(stewart);
stewart = initializeStrutDynamics(stewart);
stewart = initializeJointDynamics(stewart, 'disable', true);
stewart = initializeCylindricalPlatforms(stewart);
stewart = initializeCylindricalStruts(stewart);
stewart = computeJacobian(stewart);
stewart = initializeStewartPose(stewart); %% Options for Linearized
options = linearizeOptions;
options.SampleTime = 0;
%% Name of the Simulink File
mdl = 'stewart_active_damping';
%% Input/Output definition
clear io; io_i = 1;
io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; % Actuator Force Inputs [N]
io(io_i) = linio([mdl, '/Vm'], 1, 'openoutput'); io_i = io_i + 1; % Absolute velocity of each leg [m/s]
%% Run the linearization
G = linearize(mdl, io, options);
G.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
G.OutputName = {'Vm1', 'Vm2', 'Vm3', 'Vm4', 'Vm5', 'Vm6'};The transfer function from actuator forces to force sensors is shown in Figure fig:inertial_plant_coupling.
<<plt-matlab>>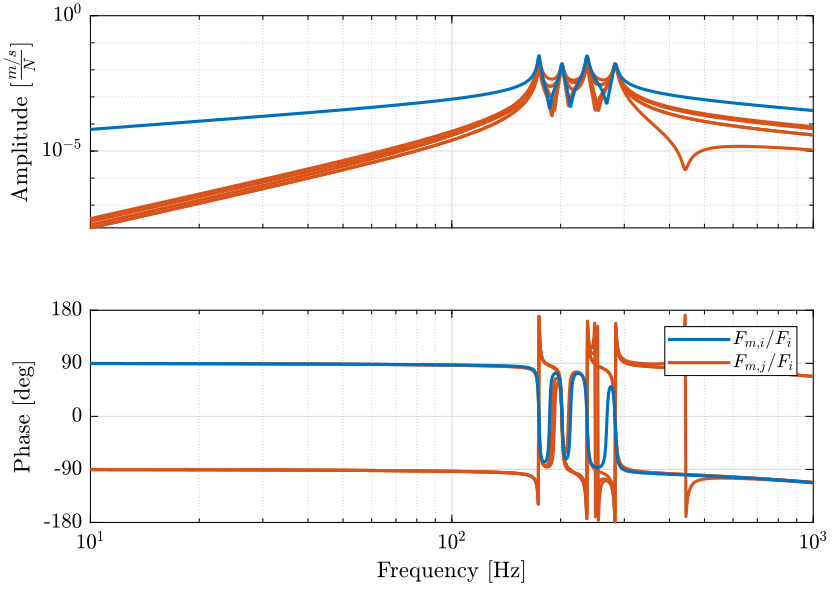
Effect of the Flexible Joint stiffness on the Dynamics
We add some stiffness and damping in the flexible joints and we re-identify the dynamics.
stewart = initializeJointDynamics(stewart);
Gf = linearize(mdl, io, options);
Gf.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
Gf.OutputName = {'Vm1', 'Vm2', 'Vm3', 'Vm4', 'Vm5', 'Vm6'};The new dynamics from force actuator to force sensor is shown in Figure fig:inertial_plant_flexible_joint_decentralized.
<<plt-matlab>>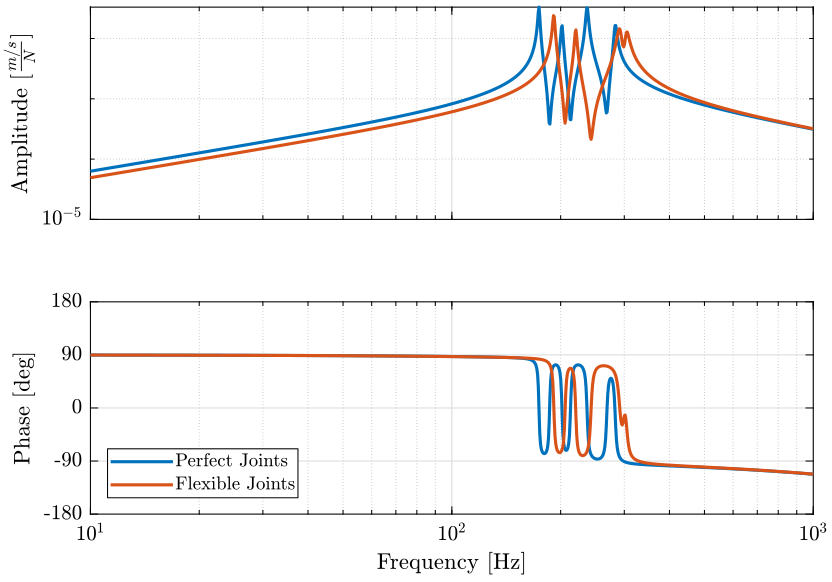
Obtained Damping
The control is a performed in a decentralized manner. The $6 \times 6$ control is a diagonal matrix with pure proportional action on the diagonal: \[ K(s) = g
\begin{bmatrix} 1 & & 0 \\ & \ddots & \\ 0 & & 1 \end{bmatrix} \]
The root locus is shown in figure fig:root_locus_inertial_rot_stiffness and the obtained pole damping function of the control gain is shown in figure fig:pole_damping_gain_inertial_rot_stiffness.
<<plt-matlab>>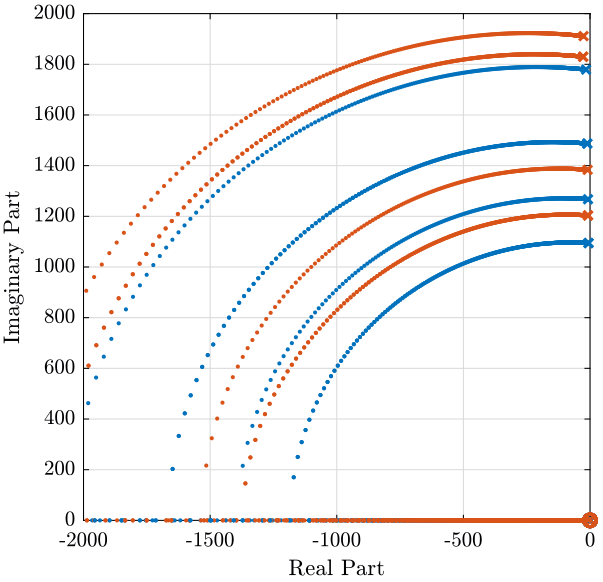
<<plt-matlab>>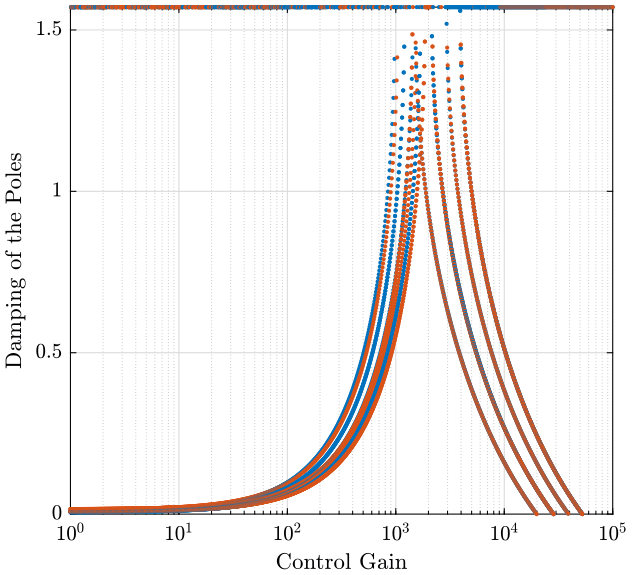
Conclusion
Joint stiffness does increase the resonance frequencies of the system but does not change the attainable damping when using relative motion sensors.
Integral Force Feedback
<<sec:active_damping_iff>>
Introduction ignore
Identification of the Dynamics with perfect Joints
We first initialize the Stewart platform without joint stiffness.
stewart = initializeStewartPlatform();
stewart = initializeFramesPositions(stewart, 'H', 90e-3, 'MO_B', 45e-3);
stewart = generateGeneralConfiguration(stewart);
stewart = computeJointsPose(stewart);
stewart = initializeStrutDynamics(stewart);
stewart = initializeAmplifiedStrutDynamics(stewart);
stewart = initializeJointDynamics(stewart, 'disable', true);
stewart = initializeCylindricalPlatforms(stewart);
stewart = initializeCylindricalStruts(stewart);
stewart = computeJacobian(stewart);
stewart = initializeStewartPose(stewart);And we identify the dynamics from force actuators to force sensors.
%% Options for Linearized
options = linearizeOptions;
options.SampleTime = 0;
%% Name of the Simulink File
mdl = 'stewart_active_damping';
%% Input/Output definition
clear io; io_i = 1;
io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; % Actuator Force Inputs [N]
io(io_i) = linio([mdl, '/Fm'], 1, 'openoutput'); io_i = io_i + 1; % Force Sensor Outputs [N]
%% Run the linearization
G = linearize(mdl, io, options);
G.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
G.OutputName = {'Fm1', 'Fm2', 'Fm3', 'Fm4', 'Fm5', 'Fm6'};The transfer function from actuator forces to force sensors is shown in Figure fig:iff_plant_coupling.
<<plt-matlab>>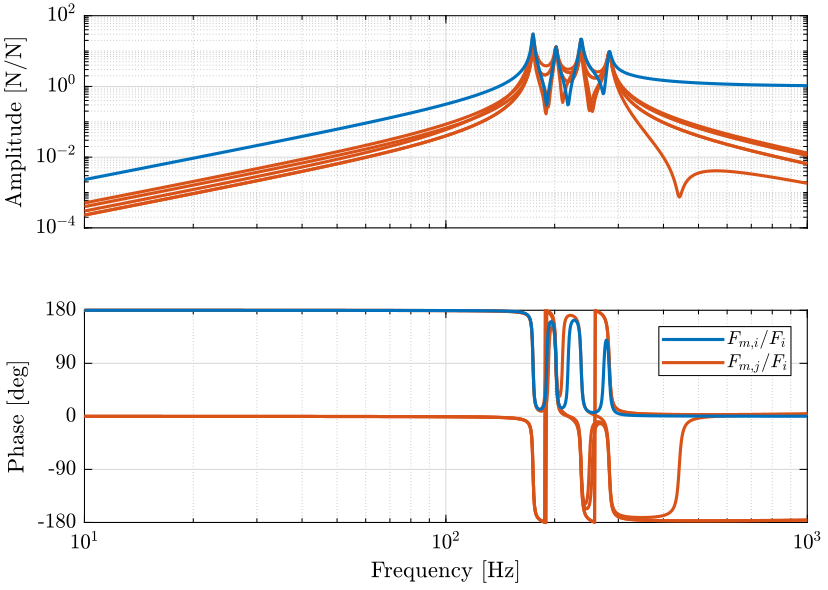
Effect of the Flexible Joint stiffness on the Dynamics
We add some stiffness and damping in the flexible joints and we re-identify the dynamics.
stewart = initializeJointDynamics(stewart);
Gf = linearize(mdl, io, options);
Gf.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
Gf.OutputName = {'Fm1', 'Fm2', 'Fm3', 'Fm4', 'Fm5', 'Fm6'};The new dynamics from force actuator to force sensor is shown in Figure fig:iff_plant_flexible_joint_decentralized.
<<plt-matlab>>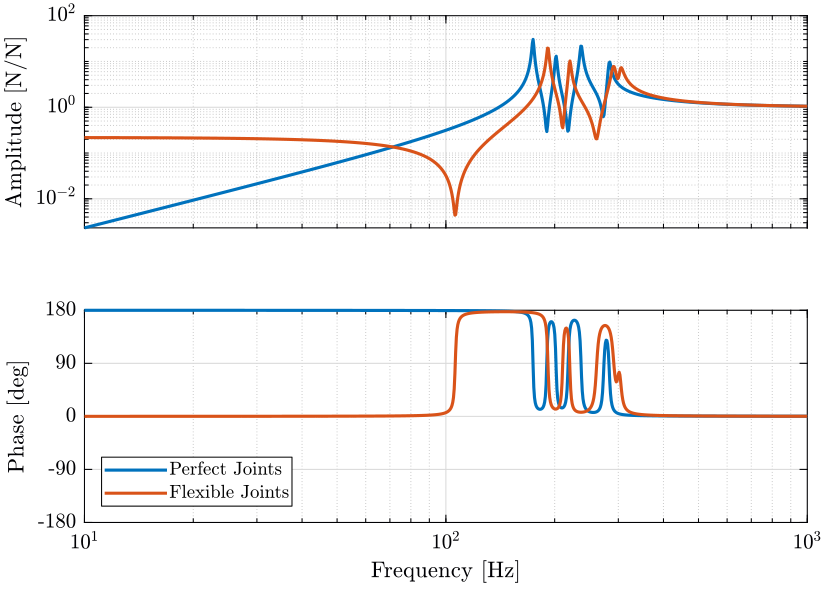
Obtained Damping
The control is a performed in a decentralized manner. The $6 \times 6$ control is a diagonal matrix with pure integration action on the diagonal: \[ K(s) = g
\begin{bmatrix} \frac{1}{s} & & 0 \\ & \ddots & \\ 0 & & \frac{1}{s} \end{bmatrix} \]
The root locus is shown in figure fig:root_locus_iff_rot_stiffness and the obtained pole damping function of the control gain is shown in figure fig:pole_damping_gain_iff_rot_stiffness.
<<plt-matlab>>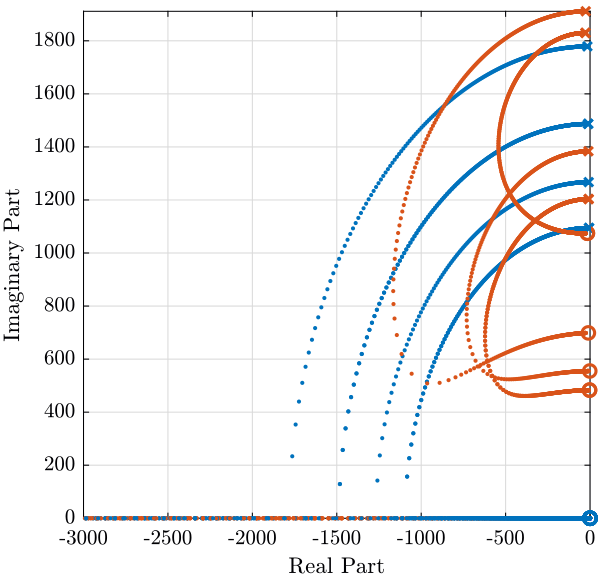
<<plt-matlab>>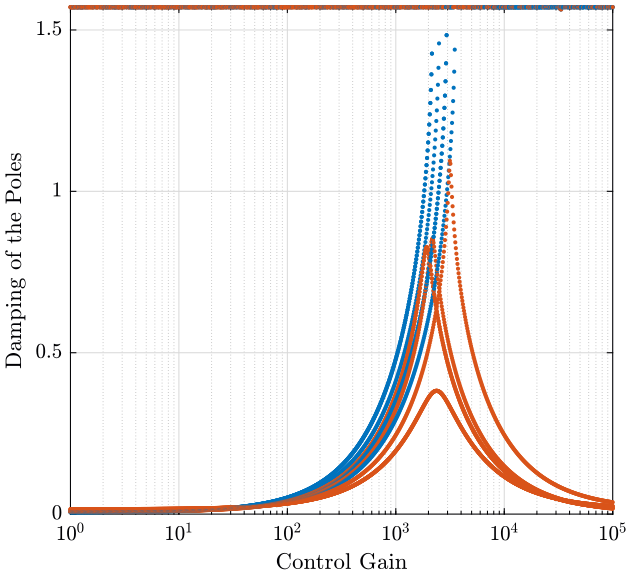
Conclusion
The joint stiffness has a huge impact on the attainable active damping performance when using force sensors. Thus, if Integral Force Feedback is to be used in a Stewart platform with flexible joints, the rotational stiffness of the joints should be minimized.
Direct Velocity Feedback
<<sec:active_damping_dvf>>
Introduction ignore
Identification of the Dynamics with perfect Joints
We first initialize the Stewart platform without joint stiffness.
stewart = initializeStewartPlatform();
stewart = initializeFramesPositions(stewart, 'H', 90e-3, 'MO_B', 45e-3);
stewart = generateGeneralConfiguration(stewart);
stewart = computeJointsPose(stewart);
stewart = initializeStrutDynamics(stewart);
stewart = initializeJointDynamics(stewart, 'disable', true);
stewart = initializeCylindricalPlatforms(stewart);
stewart = initializeCylindricalStruts(stewart);
stewart = computeJacobian(stewart);
stewart = initializeStewartPose(stewart);And we identify the dynamics from force actuators to force sensors.
%% Options for Linearized
options = linearizeOptions;
options.SampleTime = 0;
%% Name of the Simulink File
mdl = 'stewart_active_damping';
%% Input/Output definition
clear io; io_i = 1;
io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; % Actuator Force Inputs [N]
io(io_i) = linio([mdl, '/Dm'], 1, 'openoutput'); io_i = io_i + 1; % Relative Displacement Outputs [N]
%% Run the linearization
G = linearize(mdl, io, options);
G.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
G.OutputName = {'Dm1', 'Dm2', 'Dm3', 'Dm4', 'Dm5', 'Dm6'};The transfer function from actuator forces to relative motion sensors is shown in Figure fig:dvf_plant_coupling.
<<plt-matlab>>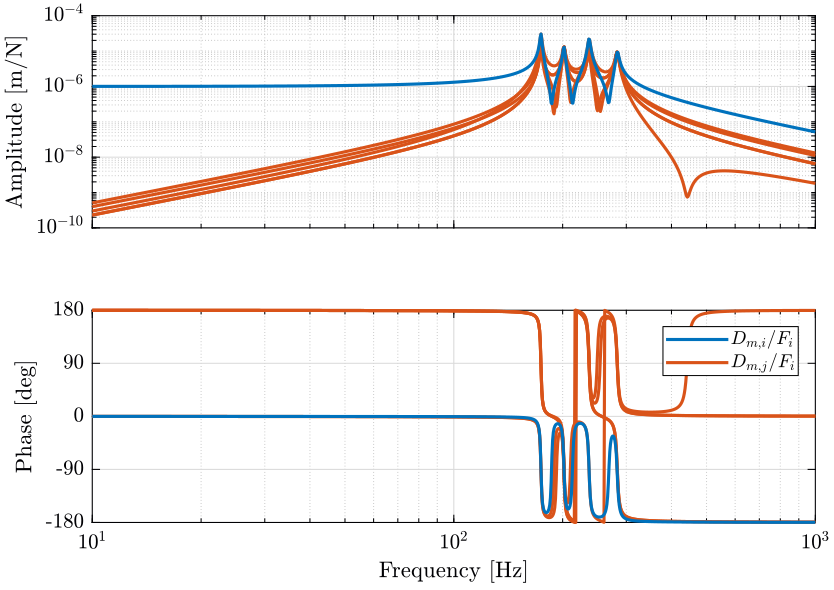
Effect of the Flexible Joint stiffness on the Dynamics
We add some stiffness and damping in the flexible joints and we re-identify the dynamics.
stewart = initializeJointDynamics(stewart);
Gf = linearize(mdl, io, options);
Gf.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
Gf.OutputName = {'Dm1', 'Dm2', 'Dm3', 'Dm4', 'Dm5', 'Dm6'};The new dynamics from force actuator to relative motion sensor is shown in Figure fig:dvf_plant_flexible_joint_decentralized.
<<plt-matlab>>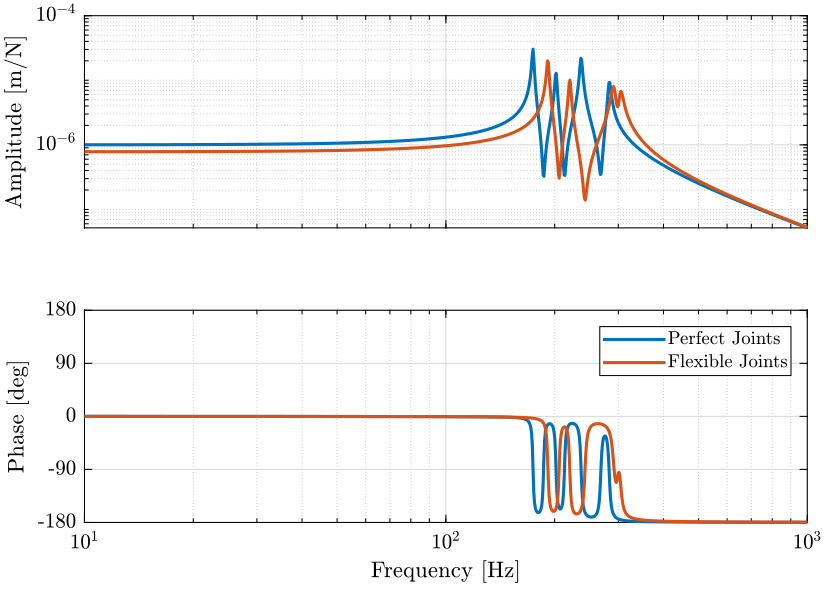
Obtained Damping
The control is a performed in a decentralized manner. The $6 \times 6$ control is a diagonal matrix with pure derivative action on the diagonal: \[ K(s) = g
\begin{bmatrix} s & & \\ & \ddots & \\ & & s \end{bmatrix} \]
The root locus is shown in figure fig:root_locus_dvf_rot_stiffness and the obtained pole damping function of the control gain is shown in figure fig:pole_damping_gain_dvf_rot_stiffness.
<<plt-matlab>>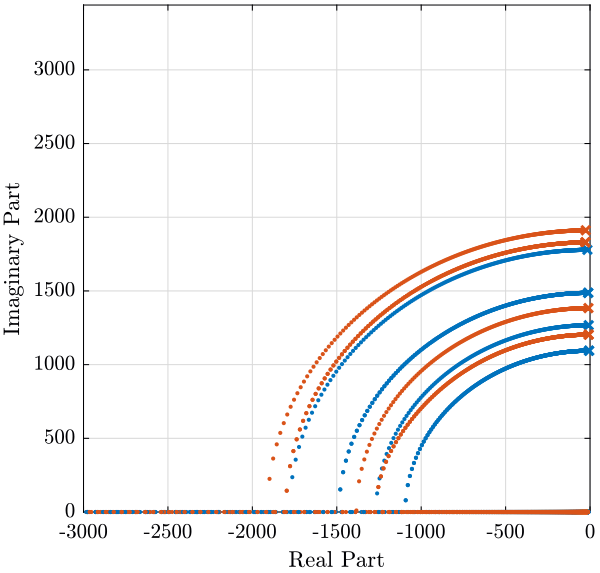
<<plt-matlab>>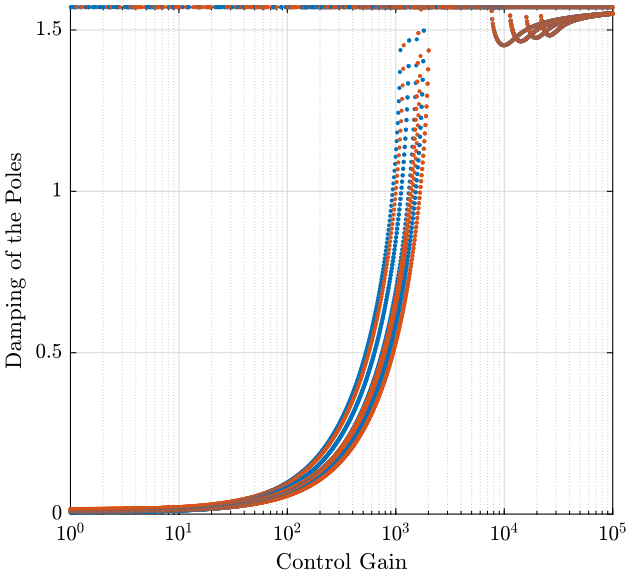
Conclusion
Joint stiffness does increase the resonance frequencies of the system but does not change the attainable damping when using relative motion sensors.