493 KiB
Nano-Hexapod on the micro-station
- Introduction
- Short Stroke Metrology System
- Simscape Model
- Identified Open Loop Plant
- Noise Budget
- Integral Force Feedback
- High Authority Control
- 6DoF Control in Cartesian plane (rotating with the nano-hexapod)
- 3DoF Control in Cartesian plane (fixed)
- Complementary Filter Control
- Scans
- Bibliography
This report is also available as a pdf.
Introduction ignore
Short Stroke Metrology System
<<sec:id31_short_stroke_metrology>>
Introduction ignore
The control of the nano-hexapod requires an external metrology system measuring the relative position of the nano-hexapod top platform with respect to the granite. As the long-stroke ($\approx 1\,cm^3$) metrology system is not developed yet, a stroke stroke ($> 100\,\mu m^3$) can be used instead to validate the nano-hexapod control.
This short stroke metrology system consists of 5 interferometers pointing at 2 spheres fixed on top of the nano-hexapod (Figure ref:fig:LION_picture_close).
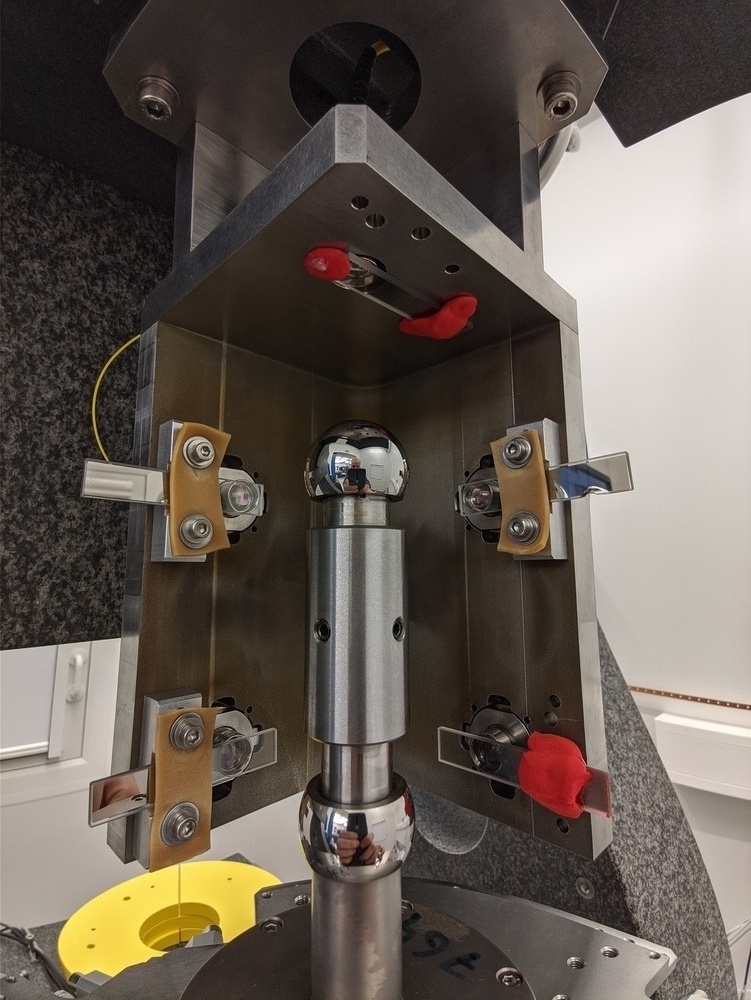
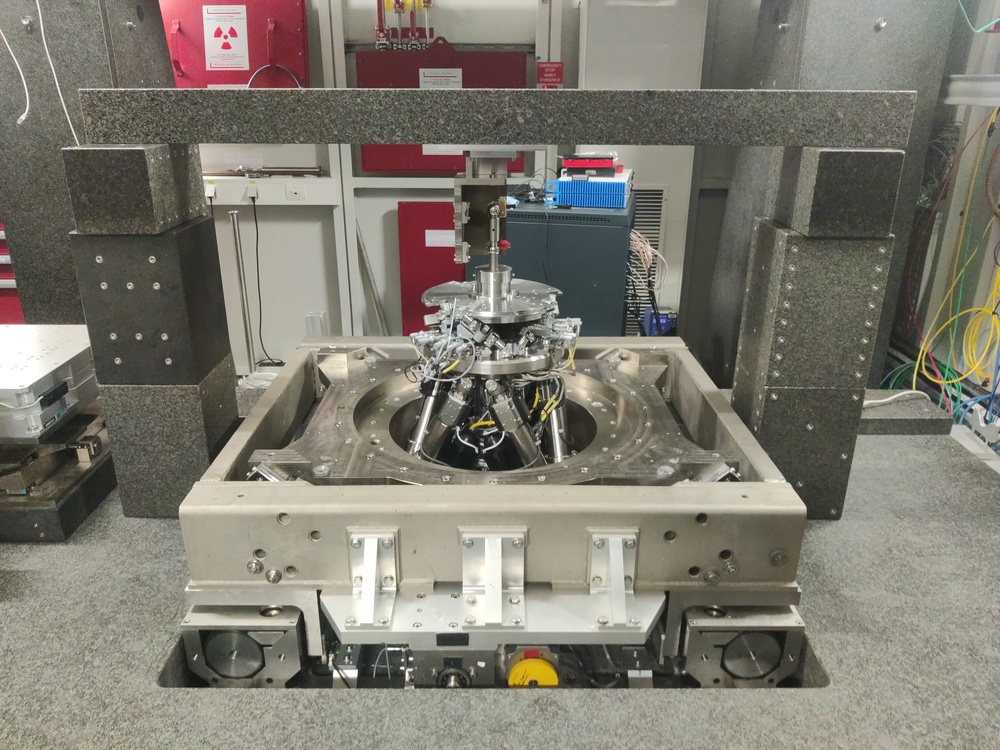
This short stroke metrology system is fixed to the main granite using a gantry made of granite blocs to have good vibration and thermal stability (see Figure ref:fig:short_stroke_metrology_overview).
As the metrology system as limited stroke (estimated to be in the order of hundreds of micro-meters in x-y-z), it has to be well aligned in the rest position.
The alignment procedure is as follows:
- The granite is aligned to be perpendicular to gravity (using inclinometer and adjusting airlocks)
- The height of micro-hexapod is tuned to be able to position the short stroke metrology without additional shim
- It is verified that the spindle axis is well perpendicular to the granite using the laser tracker
- The micro hexapod is then used to align the two spheres with the spindle axis.
Kinematics
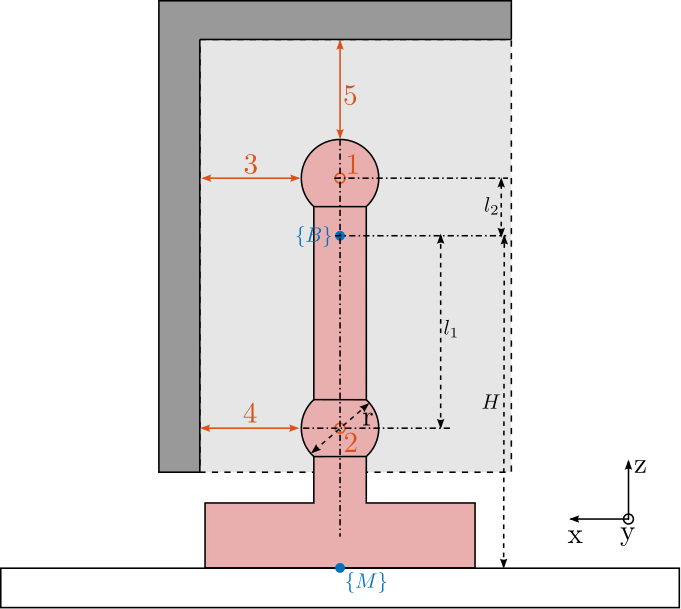
We have the following set of equations:
\begin{align} d_1 &= +D_y - l_2 R_x \\ d_2 &= +D_y + l_1 R_x \\ d_3 &= -D_x - l_2 R_y \\ d_4 &= -D_x + l_1 R_y \\ d_5 &= -D_z \end{align}That can be written as a linear transformation:
\begin{equation} \begin{bmatrix} d_1 \\ d_2 \\ d_3 \\ d_4 \\ d_5 \end{bmatrix} = \begin{bmatrix} 0 & 1 & 0 & -l_2 & 0 \\ 0 & 1 & 0 & l_1 & 0 \\ -1 & 0 & 0 & 0 & -l_2 \\ -1 & 0 & 0 & 0 & l_1 \\ 0 & 0 & -1 & 0 & 0 \end{bmatrix} \cdot \begin{bmatrix} D_x \\ D_y \\ D_z \\ R_x \\ R_y \end{bmatrix} \end{equation}By inverting the matrix, we obtain the Jacobian relation:
\begin{equation} \begin{bmatrix} D_x \\ D_y \\ D_z \\ R_x \\ R_y \end{bmatrix} = \begin{bmatrix} 0 & 1 & 0 & -l_2 & 0 \\ 0 & 1 & 0 & l_1 & 0 \\ -1 & 0 & 0 & 0 & -l_2 \\ -1 & 0 & 0 & 0 & l_1 \\ 0 & 0 & -1 & 0 & 0 \end{bmatrix}^{-1} \cdot \begin{bmatrix} d_1 \\ d_2 \\ d_3 \\ d_4 \\ d_5 \end{bmatrix} \end{equation}%% Parameters
H = 150e-3;
l1 = (150-48-42)*1e-3;
l2 = (76.2+48+42-150)*1e-3;%% Transformation matrix
Hm = [ 0 1 0 -l2 0;
0 1 0 l1 0;
-1 0 0 0 -l2;
-1 0 0 0 l1;
0 0 -1 0 0];| d1 | d2 | d3 | d4 | d5 | |
|---|---|---|---|---|---|
| Dx | 0.0 | 0.0 | -0.79 | -0.21 | 0.0 |
| Dy | 0.79 | 0.21 | 0.0 | 0.0 | 0.0 |
| Dz | 0.0 | 0.0 | 0.0 | 0.0 | -1.0 |
| Rx | -13.12 | 13.12 | -0.0 | 0.0 | 0.0 |
| Ry | -0.0 | -0.0 | -13.12 | 13.12 | 0.0 |
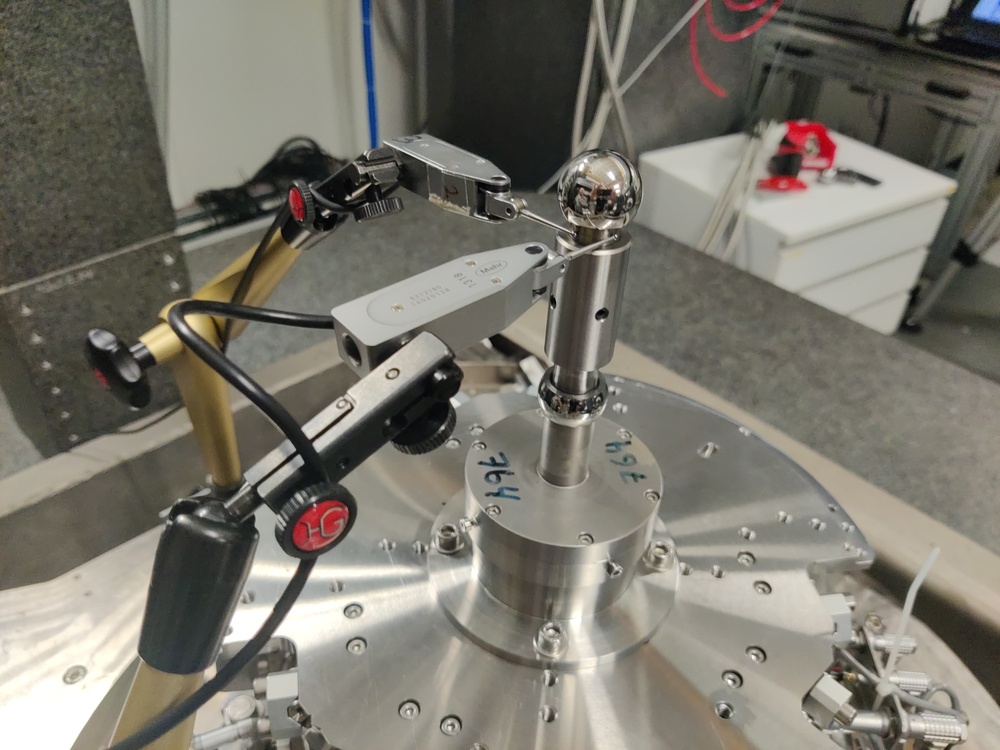
Rough alignment of spheres using comparators
Bottom Sphere, then top sphere.
Alignment better than 10um. But the coaxiality between the cylinder and the sphere might not be good.
Alignment of spheres using interferometers
Angular alignment
%% Load Data
data_it0 = h5scan(data_dir, 'alignment', 'h1rx_h1ry', 1);
data_it1 = h5scan(data_dir, 'alignment', 'h1rx_h1ry_0002', 3);
data_it2 = h5scan(data_dir, 'alignment', 'h1rx_h1ry_0002', 5);%% Offset wrong points
i_it0 = find(abs(data_it0.Rx_int_filtered(2:end)-data_it0.Rx_int_filtered(1:end-1))>1e-5);
data_it0.Rx_int_filtered(i_it0+1:end) = data_it0.Rx_int_filtered(i_it0+1:end) + data_it0.Rx_int_filtered(i_it0) - data_it0.Rx_int_filtered(i_it0+1);
i_it1 = find(abs(data_it1.Rx_int_filtered(2:end)-data_it1.Rx_int_filtered(1:end-1))>1e-5);
data_it1.Rx_int_filtered(i_it1+1:end) = data_it1.Rx_int_filtered(i_it1+1:end) + data_it1.Rx_int_filtered(i_it1) - data_it1.Rx_int_filtered(i_it1+1);
i_it2 = find(abs(data_it2.Rx_int_filtered(2:end)-data_it2.Rx_int_filtered(1:end-1))>1e-5);
data_it2.Rx_int_filtered(i_it2+1:end) = data_it2.Rx_int_filtered(i_it2+1:end) + data_it2.Rx_int_filtered(i_it2) - data_it2.Rx_int_filtered(i_it2+1);%% Compute circle fit and get radius
[~, ~, R_it0, ~] = circlefit(1e6*data_it0.Rx_int_filtered, 1e6*data_it0.Ry_int_filtered);
[~, ~, R_it1, ~] = circlefit(1e6*data_it1.Rx_int_filtered, 1e6*data_it1.Ry_int_filtered);
[~, ~, R_it2, ~] = circlefit(1e6*data_it2.Rx_int_filtered, 1e6*data_it2.Ry_int_filtered);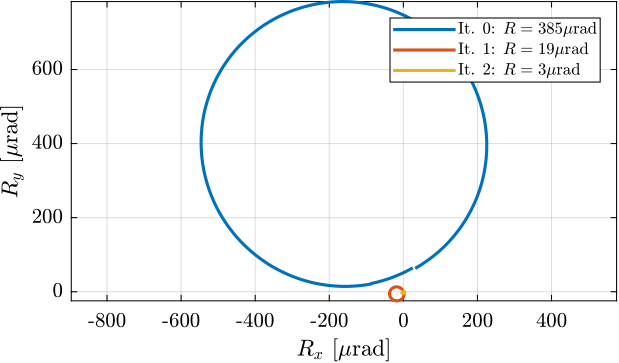
Eccentricity alignment
%% Load Data
data_it0 = h5scan(data_dir, 'alignment', 'h1rx_h1ry_0002', 5);
data_it1 = h5scan(data_dir, 'alignment', 'h1dx_h1dy', 1);%% Offset wrong points
i_it0 = find(abs(data_it0.Dy_int_filtered(2:end)-data_it0.Dy_int_filtered(1:end-1))>1e-5);
data_it0.Dy_int_filtered(i_it0+1:end) = data_it0.Dy_int_filtered(i_it0+1:end) + data_it0.Dy_int_filtered(i_it0) - data_it0.Dy_int_filtered(i_it0+1);%% Compute circle fit and get radius
[~, ~, R_it0, ~] = circlefit(1e6*data_it0.Dx_int_filtered, 1e6*data_it0.Dy_int_filtered);
[~, ~, R_it1, ~] = circlefit(1e6*data_it1.Dx_int_filtered, 1e6*data_it1.Dy_int_filtered);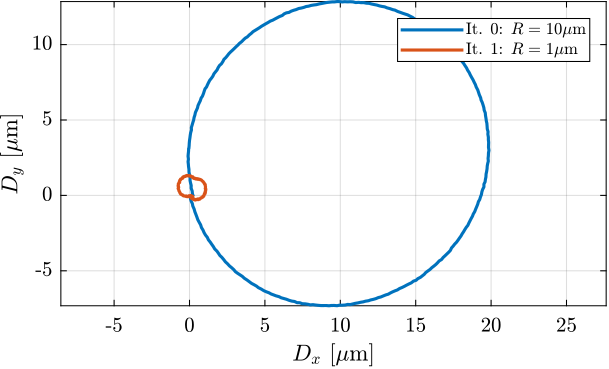
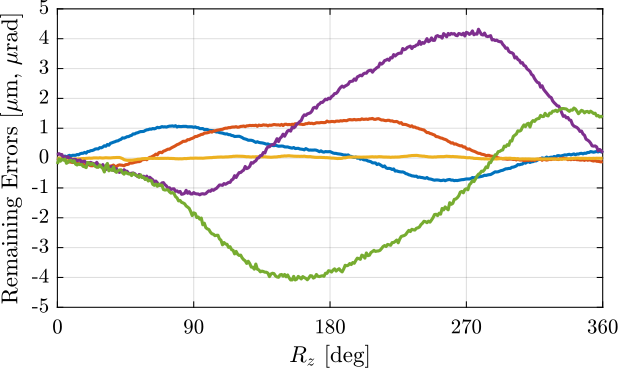
Residual error after alignment
%% Load Data
data = h5scan(data_dir, 'alignment', 'h1dx_h1dy', 1);- Dx and Dy are less than 1um.
- Dz less than 0.1um.
- Rx and Ry less than 4urad.
Metrology acceptance
Because the interferometers are pointing to spheres and not flat surfaces, the lateral acceptance is limited.
data = h5scan(data_dir, 'metrology_acceptance', 'after_int_align_meshXY', 1);
x = 1e3*detrend(data.h1tx, 0); % [um]
y = 1e3*detrend(data.h1ty, 0); % [um]
z = 1e6*data.Dz_int_filtered - max(data.Dz_int_filtered); % [um]
mdl = scatteredInterpolant(x, y, z);
[xg, yg] = meshgrid(unique(x), unique(y));
zg = mdl(xg, yg);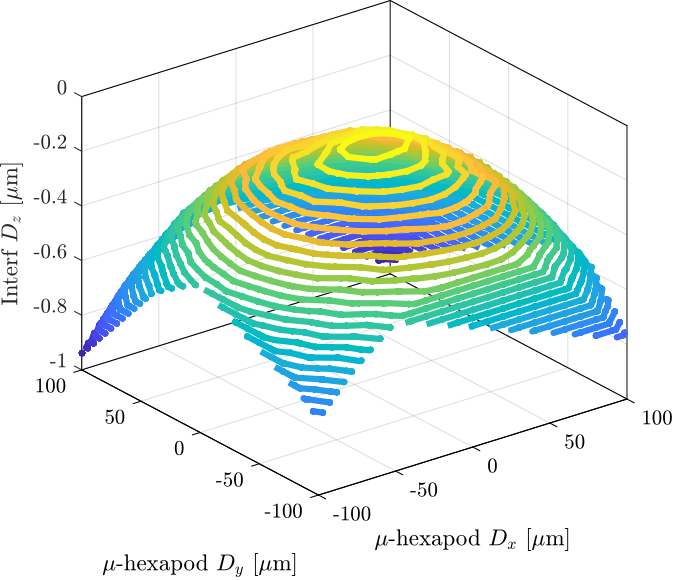
Simscape Model
<<sec:id31_simscape_model>>
Introduction ignore
Init model
%% Add directories to path for Simscape Model
addpath('mat')
addpath('matlab/subsystems')
addpath('STEPS/nano_hexapod')
addpath('STEPS/metrology')
addpath('STEPS/png')%% Options for Linearized
options = linearizeOptions;
options.SampleTime = 0;
%% Name of the Simulink File
mdl = 'nass_model_id31';open(mdl)load('mat/conf_simulink.mat');
%% Initialize each Simscape model elements
initializeGround();
initializeGranite();
initializeTy();
initializeRy();
initializeRz();
initializeMicroHexapod();
initializeSimscapeConfiguration();
initializeDisturbances('enable', false);
initializeLoggingConfiguration('log', 'none');
initializeController('type', 'open-loop');
initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
initializeSample('type', '0');
initializePosError();
initializeReferences();
initializeRzEstimate('type', 'encoders');
initializeLion();Identify Transfer functions
%% Input/Output definition
clear io; io_i = 1;
io(io_i) = linio([mdl, '/Controller'], 1, 'openinput'); io_i = io_i + 1; % Actuator Inputs
io(io_i) = linio([mdl, '/Micro-Station'], 3, 'openoutput', [], 'Fnlm'); io_i = io_i + 1; % Force Sensors
io(io_i) = linio([mdl, '/Micro-Station'], 3, 'openoutput', [], 'Dnlm'); io_i = io_i + 1; % Encoders
io(io_i) = linio([mdl, '/Tracking Error'], 1, 'openoutput', [], 'EdL'); io_i = io_i + 1; % Position Errors
io(io_i) = linio([mdl, '/Micro-Station/metrology_5dof/Lion_Metrology'], 1, 'output'); io_i = io_i + 1; % InterferometersIFF Plant
Encoder plant
HAC Undamped plant
Identified Open Loop Plant
<<sec:id31_open_loop_plant>>
Introduction ignore
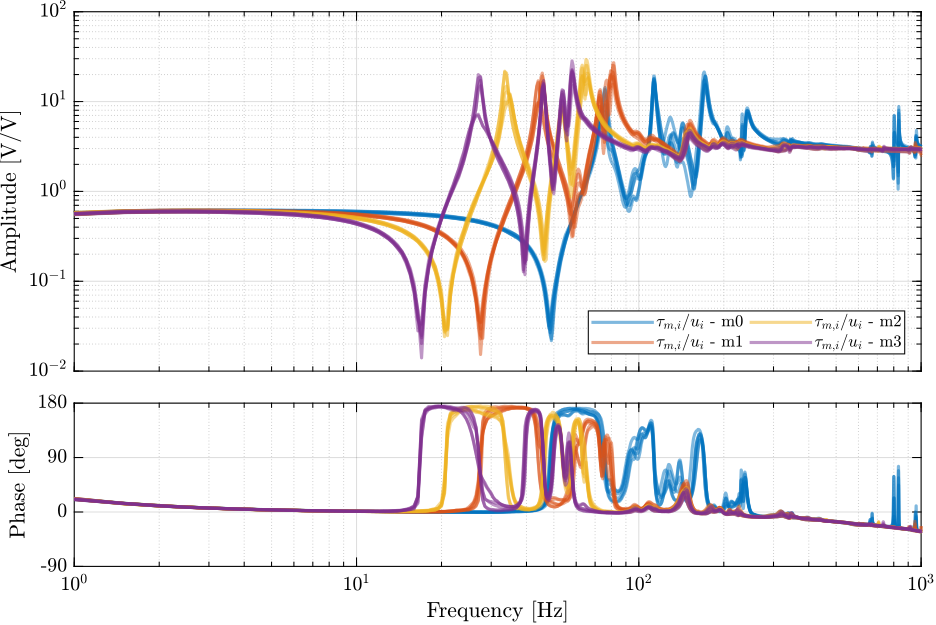
IFF Plant
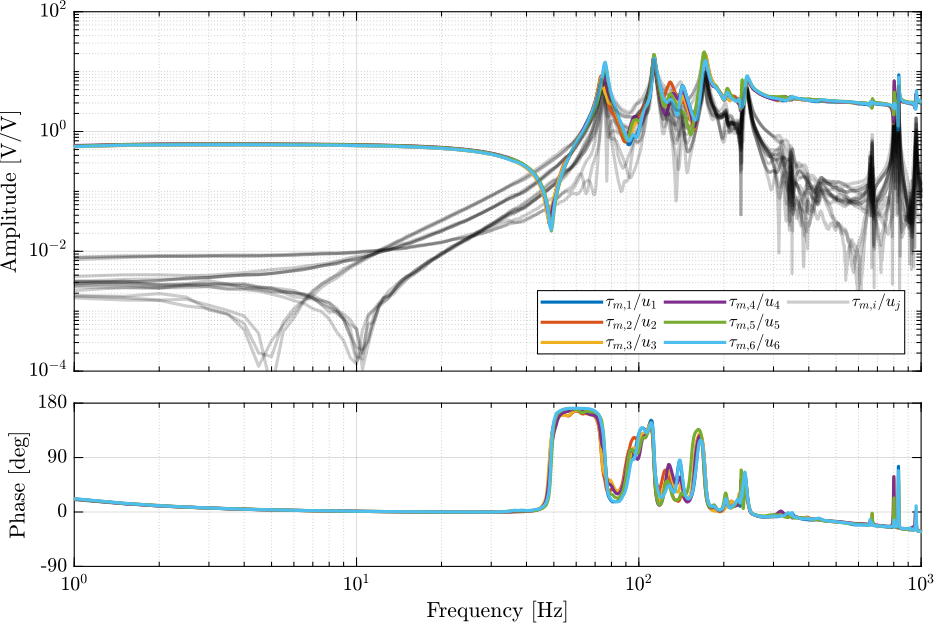
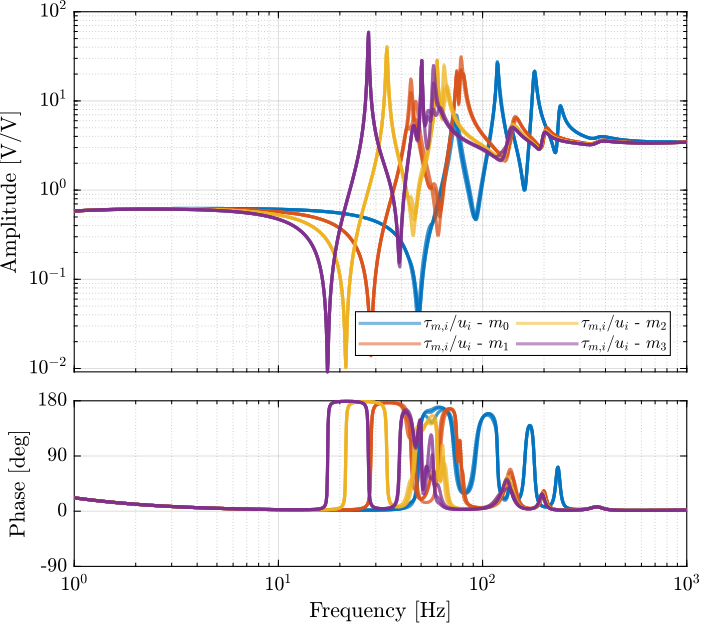
The measured frequency response functions from DAC voltages $u_i$ to measured voltages on the force sensors $\tau_{m,i}$ are compared with the simscape model in Figure ref:fig:id31_comp_simscape_frf_ol_iff.
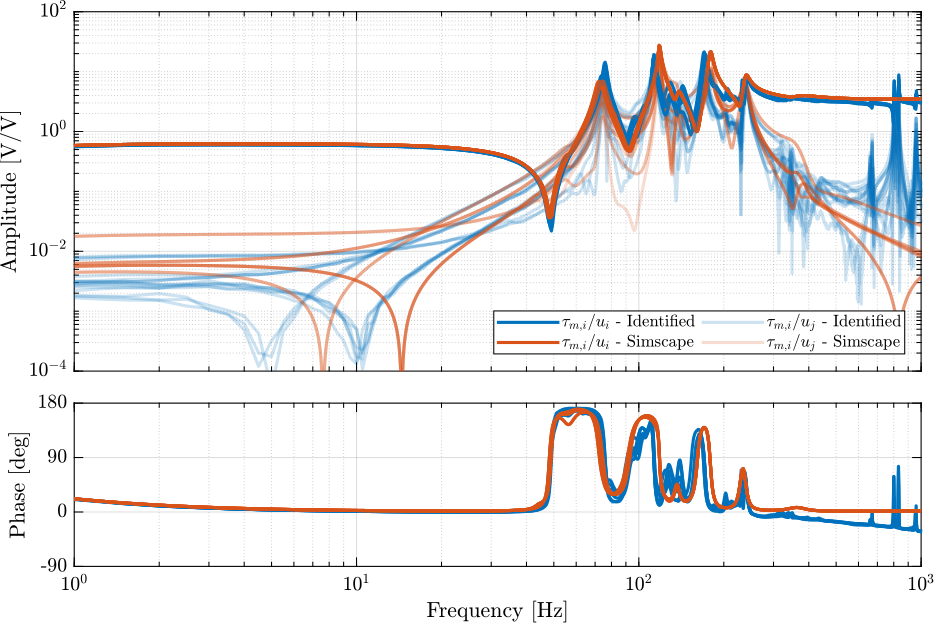
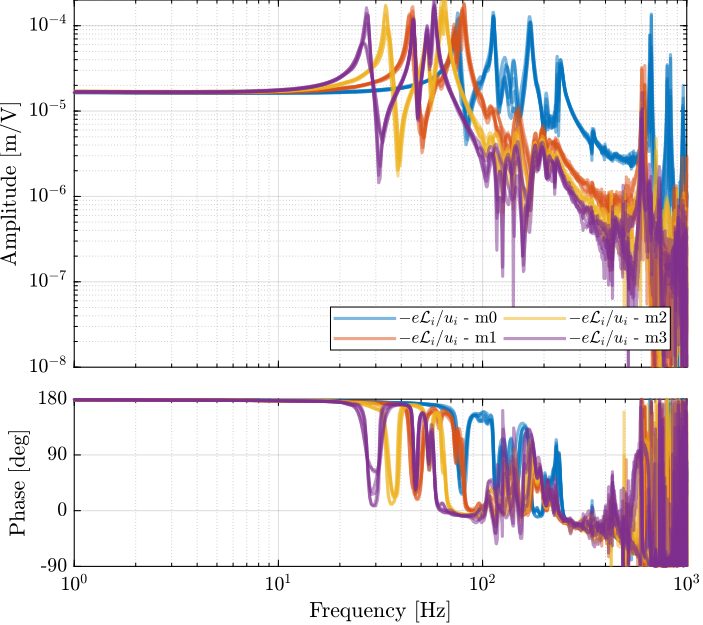
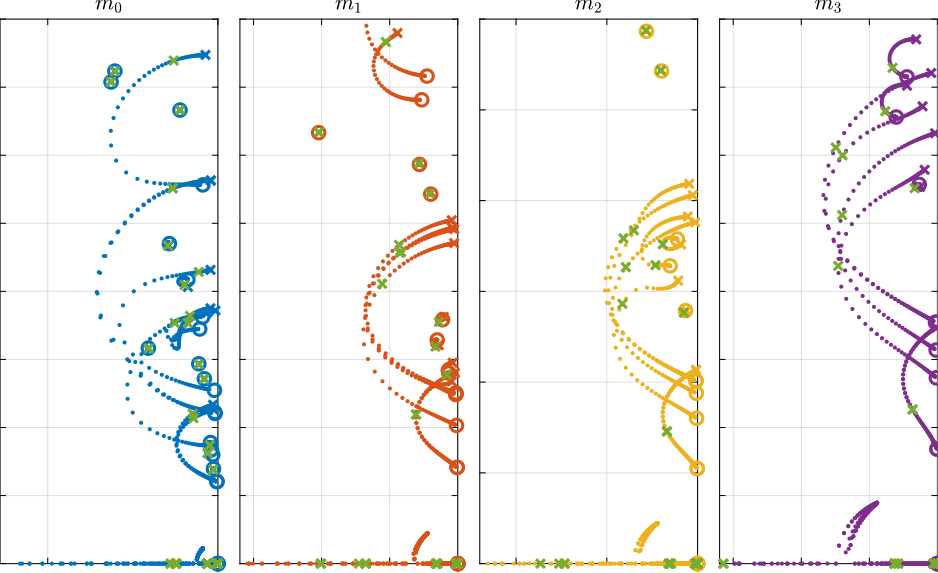
The effect of the payload mass on the diagonal elements are shown in Figure ref:fig:id31_effect_mass_frf_ol_iff.
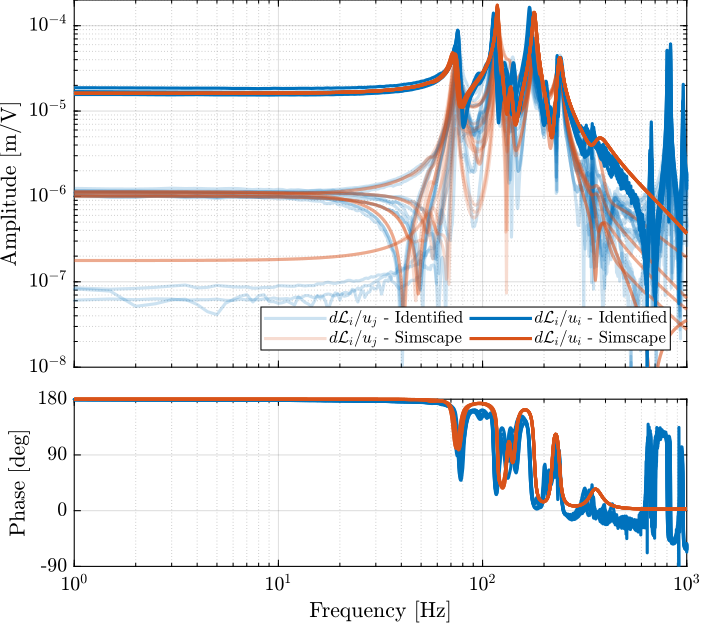
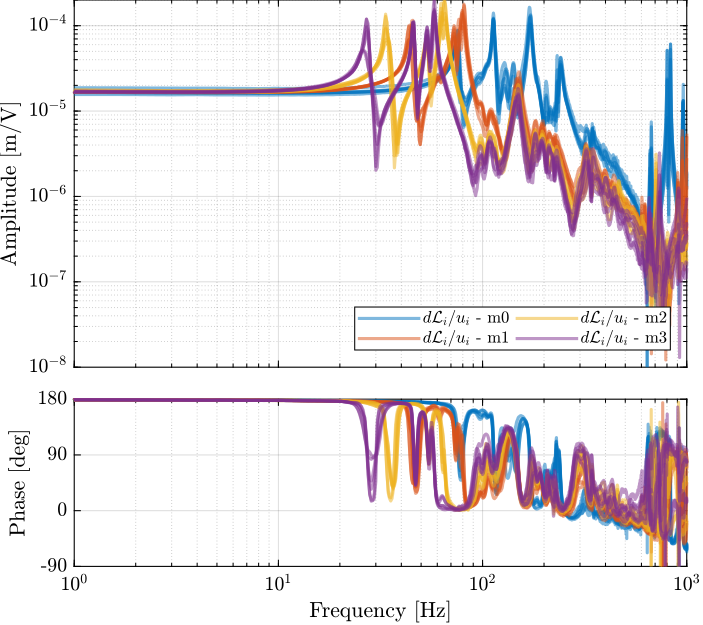
Encoder plant
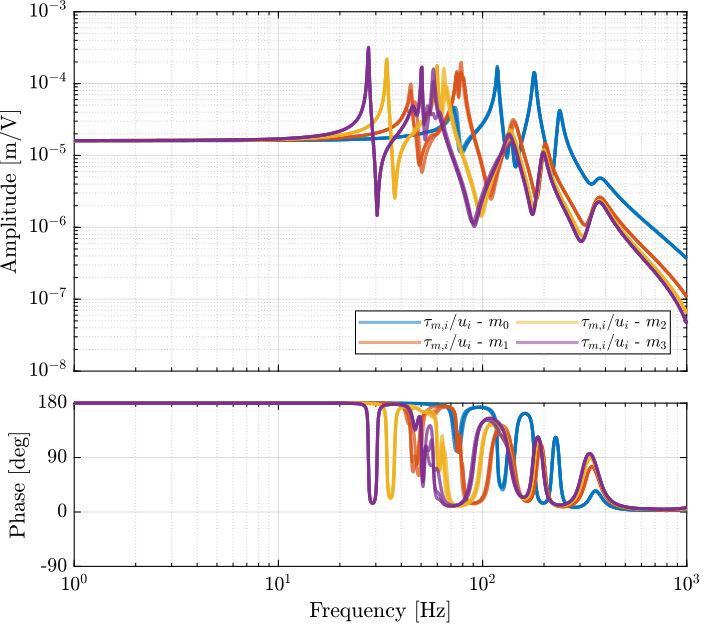
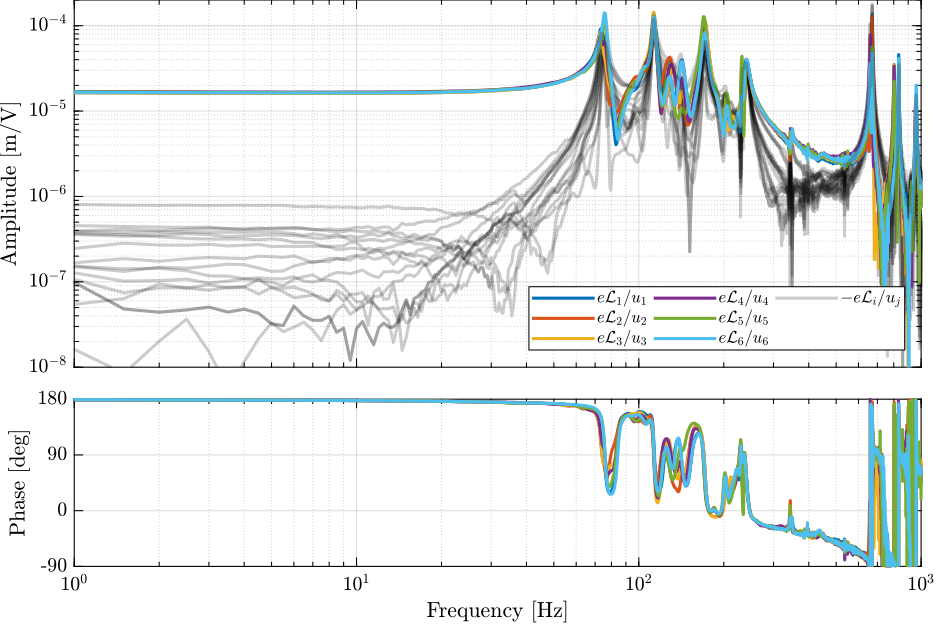
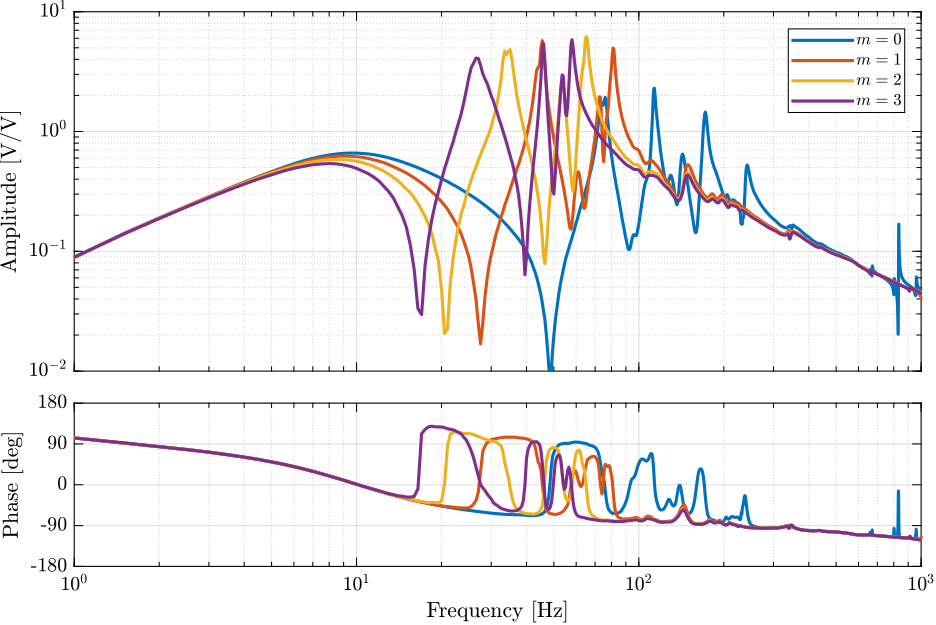
The identified frequency response functions from general voltages $u_i$ to measured displacement of the struts by the encoders $d\mathcal{L}_i$ are compared with the simscape model in Figure ref:fig:id31_comp_simscape_frf_ol_enc.
HAC Undamped plant
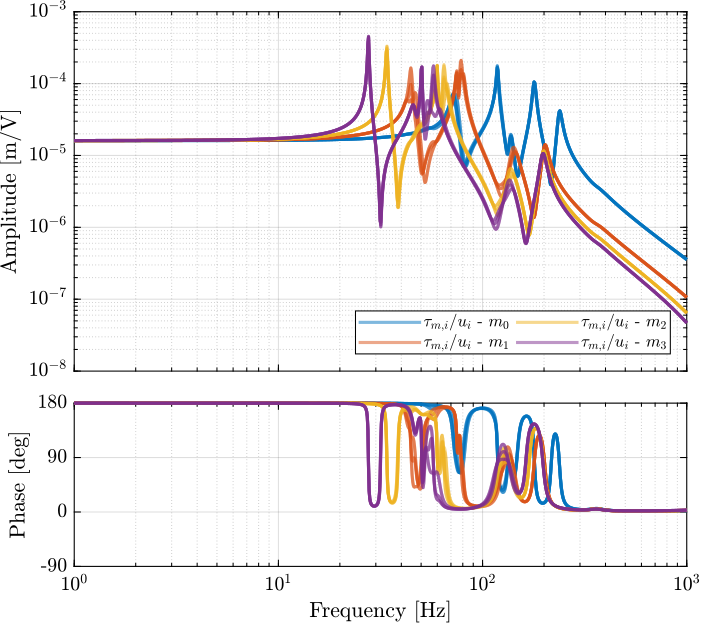
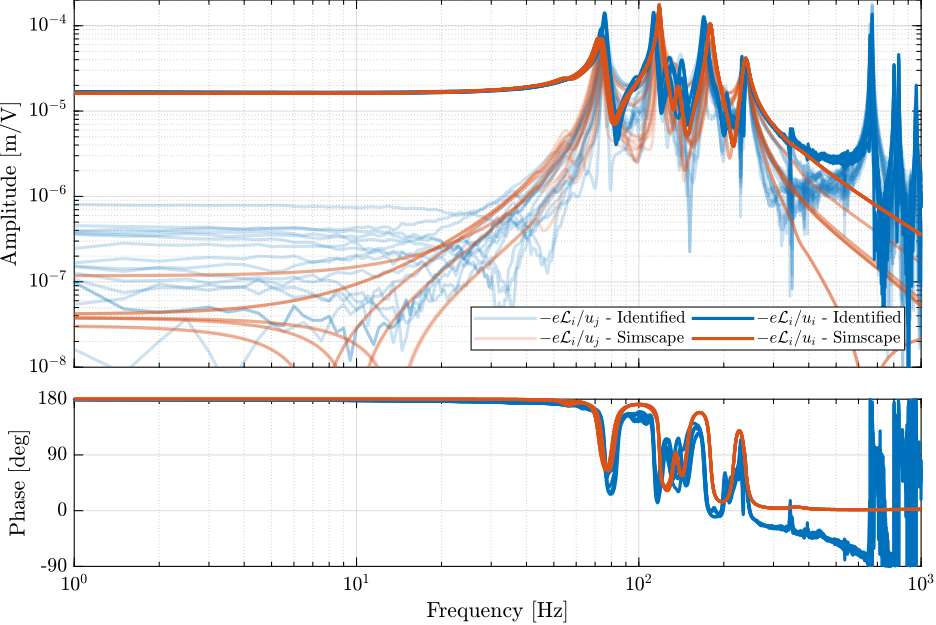
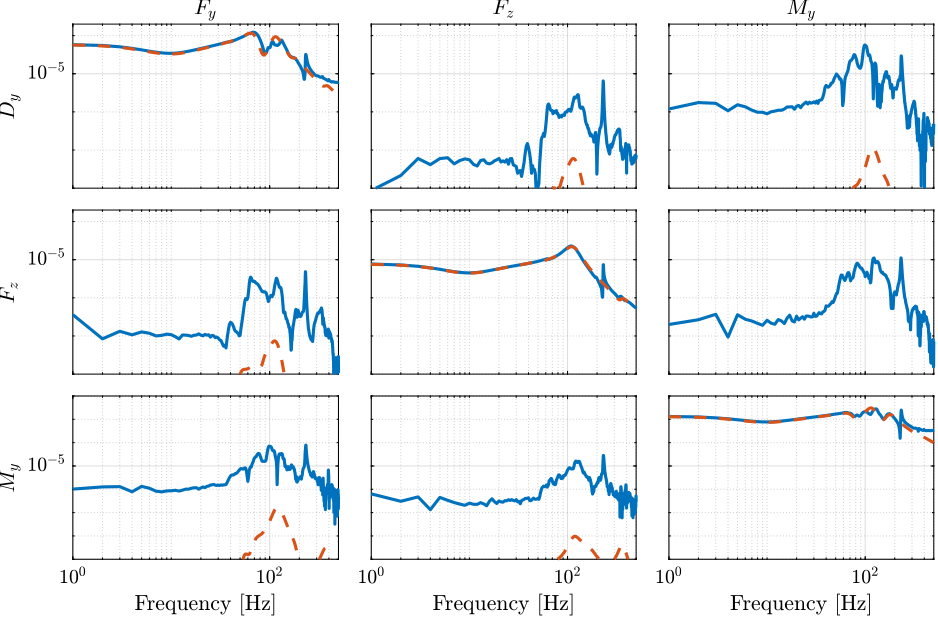
The identified frequency response functions from actuator voltages $u_i$ to measured strut motion from the external metrology (i.e. the interferometers) are compare with the simscape model in Figure ref:fig:id31_comp_simscape_frf_ol_int.
Decoupling improvement thanks to better Rz alignment
Alignment procedure
- Control based on encoders
- Slow moving in X and Y
- Compare with X and Y from interf
%% Load Data
data_1_dx = h5scan(data_dir, 'align_int_enc_Rz', 'tx_first_scan', 2);
data_1_dy = h5scan(data_dir, 'align_int_enc_Rz', 'tx_first_scan', 3);
data_2_dx = h5scan(data_dir, 'align_int_enc_Rz', 'verif-after-correct-offset', 1);
data_2_dy = h5scan(data_dir, 'align_int_enc_Rz', 'verif-after-correct-offset', 2);figure;
hold on;
plot(1e6*data_1_dx.Dx_int_filtered, 1e6*data_1_dx.Dy_int_filtered, 'color', colors(1,:), 'DisplayName', 'Measurement')
plot(1e6*data_1_dy.Dx_int_filtered, 1e6*data_1_dy.Dy_int_filtered, 'color', colors(1,:), 'HandleVisibility', 'off')
plot(1e6*[-10:10]*cos(2.7*pi/180), -1e6*[-10:10]*sin(2.7*pi/180), '--', 'color', colors(2,:), 'DisplayName', '$R_z = 2.7$ deg')
plot(1e6*[-10:10]*sin(2.7*pi/180), 1e6*[-10:10]*cos(2.7*pi/180), '--', 'color', colors(2,:), 'HandleVisibility', 'off')
hold off;
xlabel('Interf $D_x$ [$\mu$m]');
ylabel('Interf $D_y$ [$\mu$m]');
legend('location', 'northeast', 'FontSize', 8, 'NumColumns', 1);
axis equal
xlim([-10, 10]); ylim([-10, 10]);
xticks([-10:5:10]); yticks([-10:5:10]);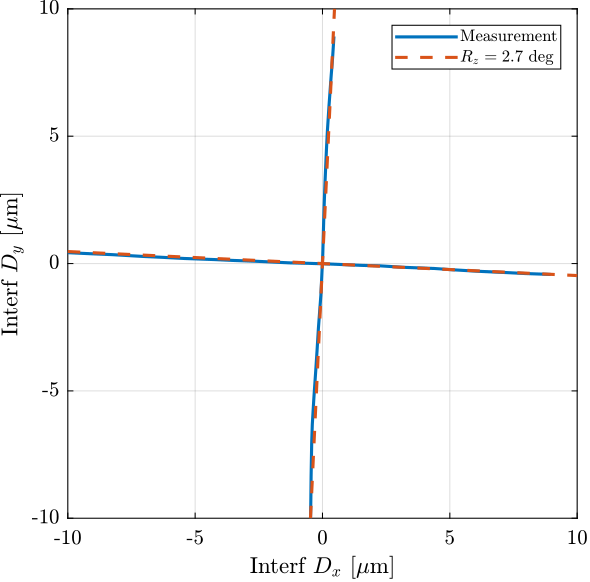
figure;
hold on;
plot(1e6*data_1_dx.Dx_int_filtered, 1e6*data_1_dx.Dy_int_filtered, 'color', colors(1,:), 'DisplayName', 'Initial')
plot(1e6*data_1_dy.Dx_int_filtered, 1e6*data_1_dy.Dy_int_filtered, 'color', colors(1,:), 'HandleVisibility', 'off')
plot(1e6*data_2_dx.Dx_int_filtered, 1e6*data_2_dx.Dy_int_filtered, 'color', colors(2,:), 'DisplayName', 'After $R_z$ calib')
plot(1e6*data_2_dy.Dx_int_filtered, 1e6*data_2_dy.Dy_int_filtered, 'color', colors(2,:), 'HandleVisibility', 'off')
hold off;
xlabel('Interf $D_x$ [$\mu$m]');
ylabel('Interf $D_y$ [$\mu$m]');
legend('location', 'northeast', 'FontSize', 8, 'NumColumns', 1);
axis equal
xlim([-10, 10]); ylim([-10, 10]);
xticks([-10:5:10]); yticks([-10:5:10]);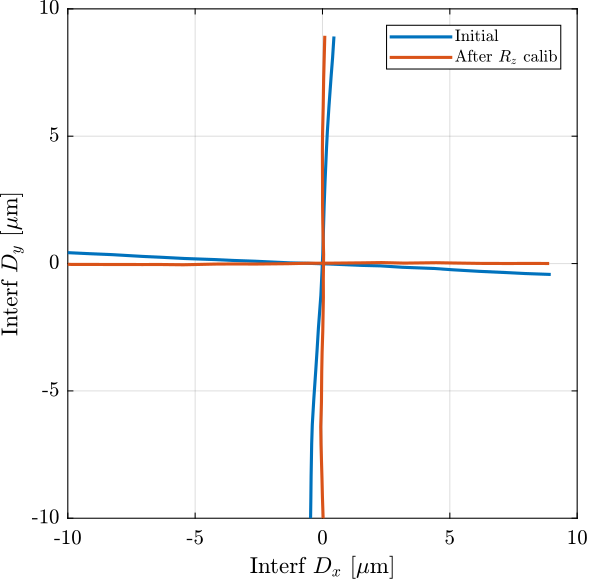
m0
data = load(sprintf('%s/dynamics/2023-08-08_16-17_ol_plant_m0_Wz0.mat', mat_dir));
data_align = load(sprintf('%s/dynamics/2023-08-17_17-37_ol_plant_m0_Wz0_new_Rz_align.mat', mat_dir));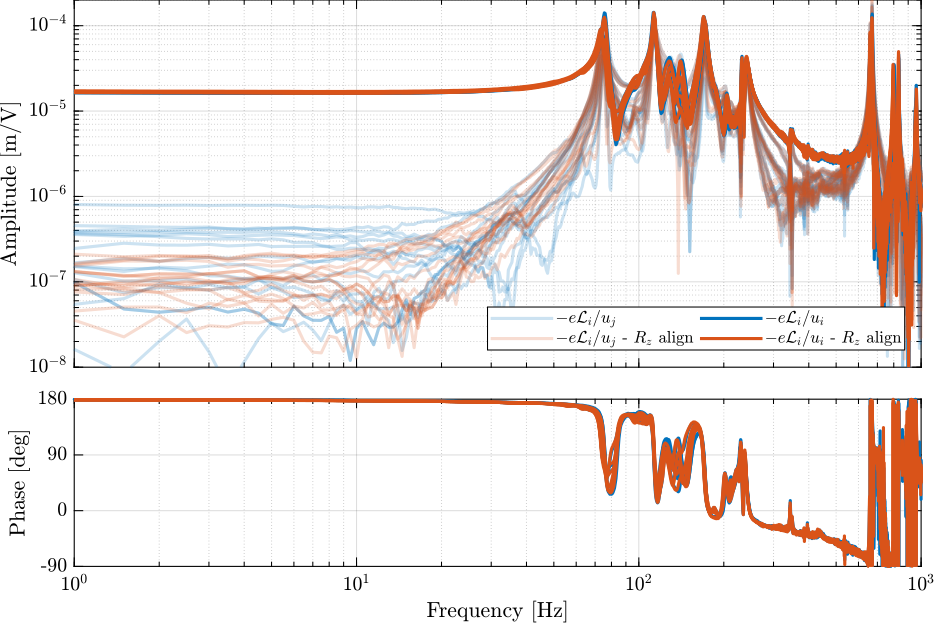
m3
data = load(sprintf('%s/dynamics/2023-08-10_18-16_damp_plant_m3_Wz0.mat', mat_dir));
data_align = load(sprintf('%s/dynamics/2023-08-21_15-52_damp_plant_m3_new_Rz.mat', mat_dir));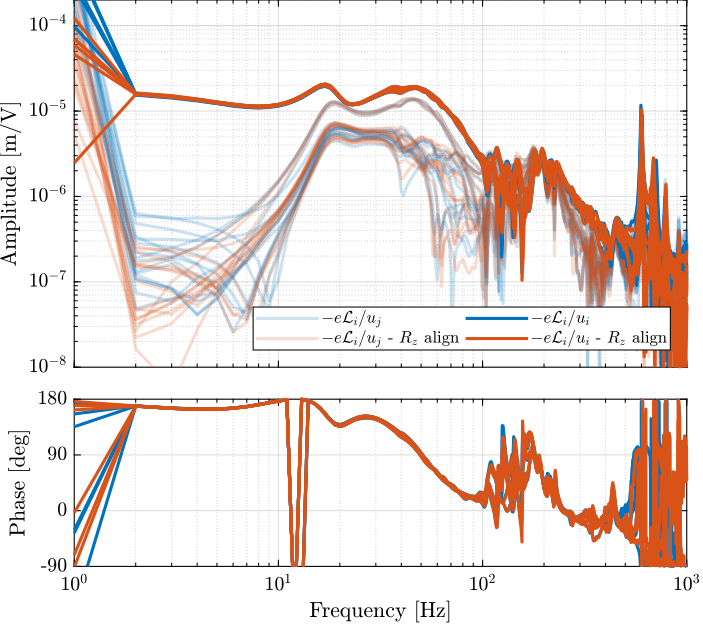
Conclusion
- Good match between the model and experiment
TODO Noise Budget
<<sec:id31_noise_budget>>
Introduction ignore
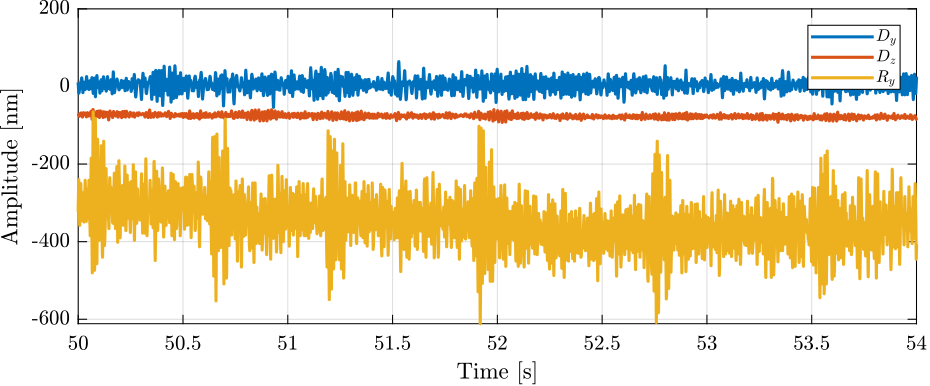
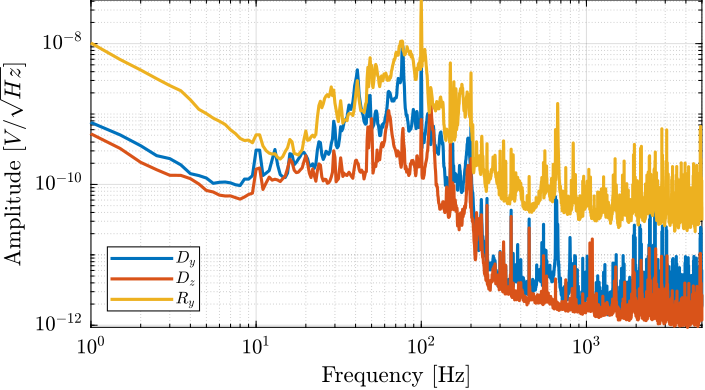
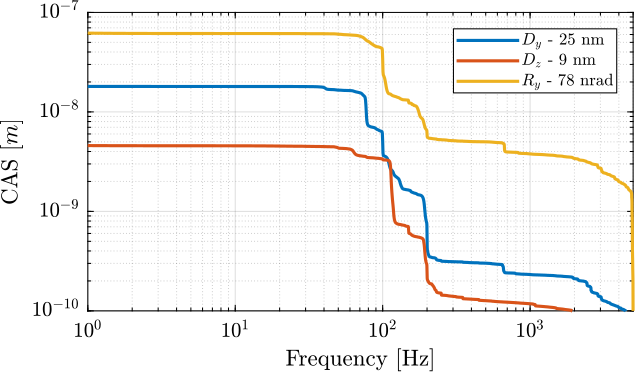
In this section, the noise budget is performed. The vibrations of the sample is measured in different conditions using the external metrology.
Open-Loop Noise Budget
First, the noise is measured while no motion is performed.
%% Load measured noise
data_m0 = load(sprintf('%s/freq_analysis/2023-08-11_16-51_m0_lac_off.mat', mat_dir));Noise budget in the cartesian frame
Data in the time domain
In the frequency domain
Effect of LAC
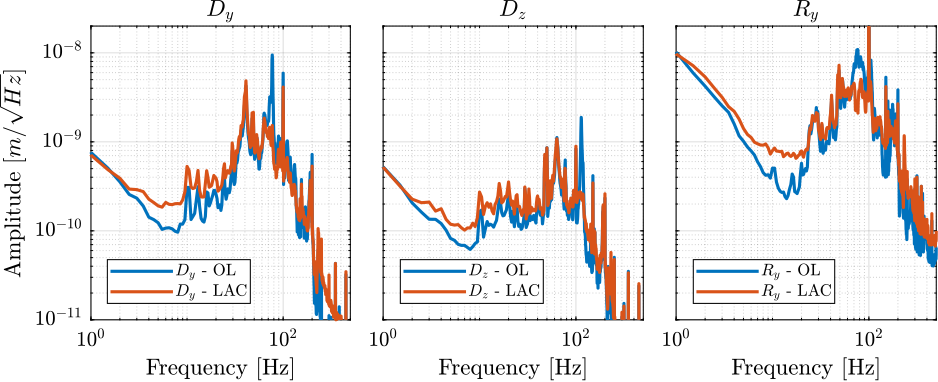
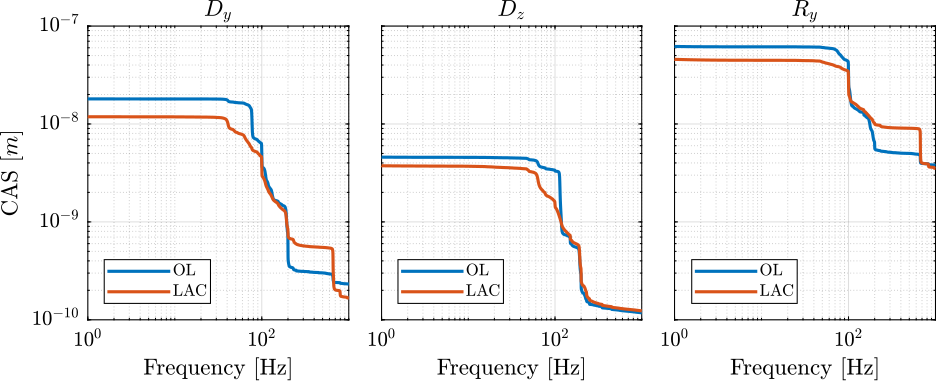
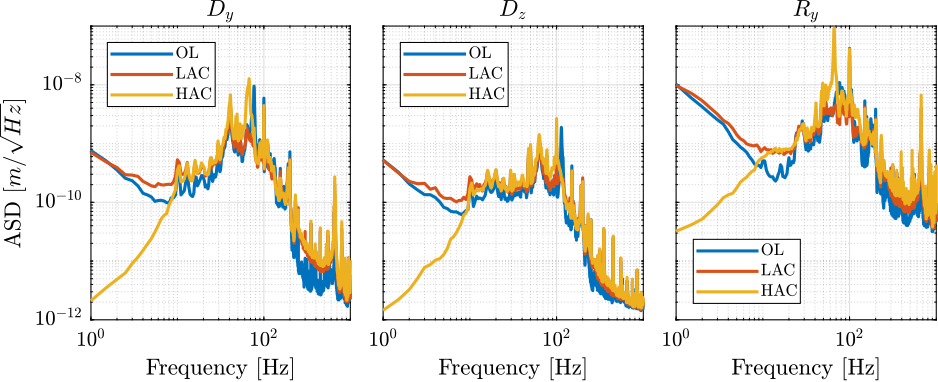
%% Load measured noise
data_ol = load(sprintf('%s/freq_analysis/2023-08-11_16-51_m0_lac_off.mat', mat_dir));
data_lac = load(sprintf('%s/freq_analysis/2023-08-11_16-46_m0_lac_on.mat', mat_dir));Effect of LAC (Figure ref:fig:id31_noise_budget_effect_lac_m0):
- reduce amplitude around 80Hz
- Inject some noise between 200 and 700Hz?
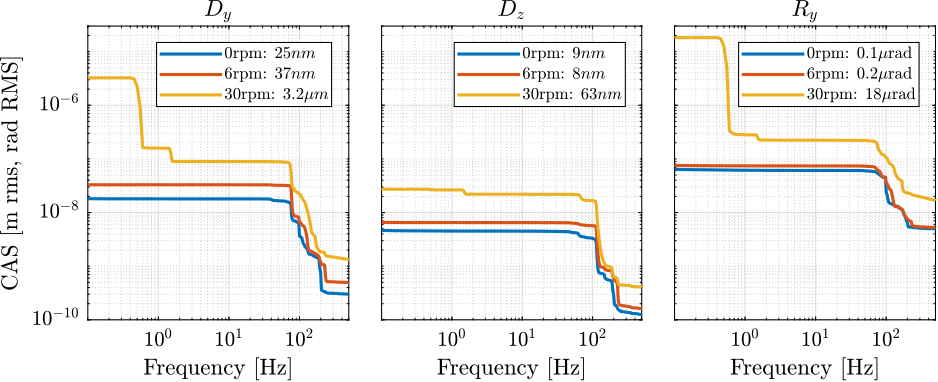
Effect of rotation
data_Wz0 = load(sprintf('%s/freq_analysis/2023-08-11_16-51_m0_lac_off.mat', mat_dir));
data_Wz1 = load(sprintf('%s/freq_analysis/2023-08-11_17-18_m0_lac_off_1rpm.mat', mat_dir));
data_Wz2 = load(sprintf('%s/freq_analysis/2023-08-11_17-39_m0_lac_off_30rpm.mat', mat_dir));Rotation induces lots of vibrations, especially at high velocity.
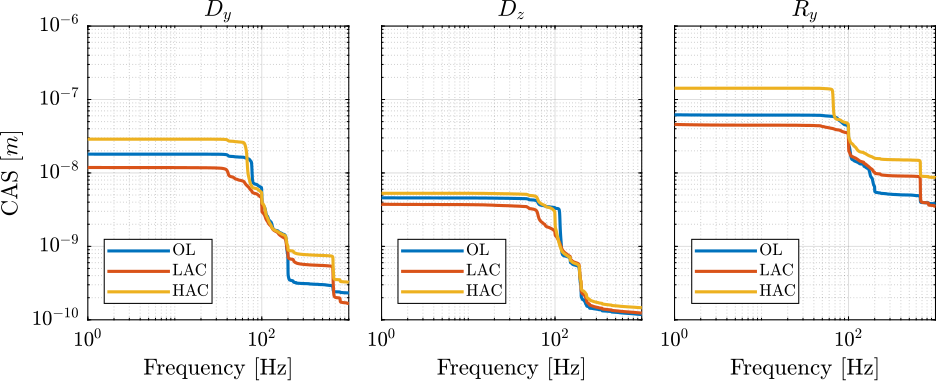
Effect of HAC
%% Load measured noise
data_ol = load(sprintf('%s/freq_analysis/2023-08-11_16-51_m0_lac_off.mat', mat_dir));
data_lac = load(sprintf('%s/freq_analysis/2023-08-11_16-46_m0_lac_on.mat' , mat_dir));
data_hac = load(sprintf('%s/freq_analysis/2023-08-11_16-49_m0_hac_on.mat' , mat_dir));Bandwidth is approximately 10Hz.
TODO Noise coming from force sensor
Integral Force Feedback
<<sec:id31_iff>>
Introduction ignore
IFF Plants
Introduction ignore
6x6 Plant
%% Load identification data
data = load(sprintf('%s/dynamics/2023-08-08_16-17_ol_plant_m0_Wz0.mat', mat_dir));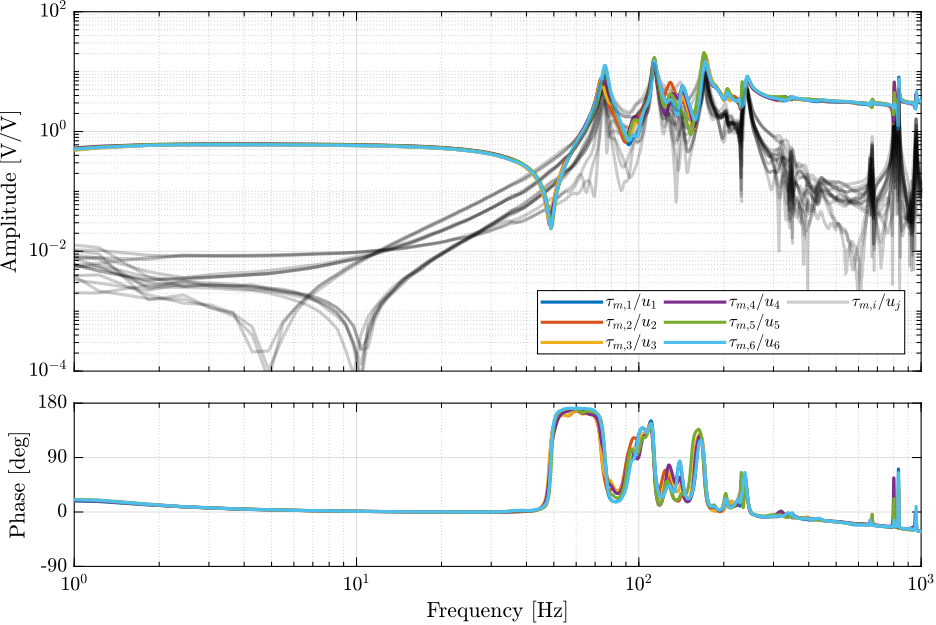
Compare with Model:
load('Gm_iff.mat');Effect of Rotation
%% Load identification data
data_Wz0 = load(sprintf('%s/dynamics/2023-08-08_16-17_ol_plant_m0_Wz0.mat', mat_dir));
data_Wz1 = load(sprintf('%s/dynamics/2023-08-08_16-28_ol_plant_m0_Wz36.mat', mat_dir));
data_Wz2 = load(sprintf('%s/dynamics/2023-08-08_16-45_ol_plant_m0_Wz180.mat', mat_dir));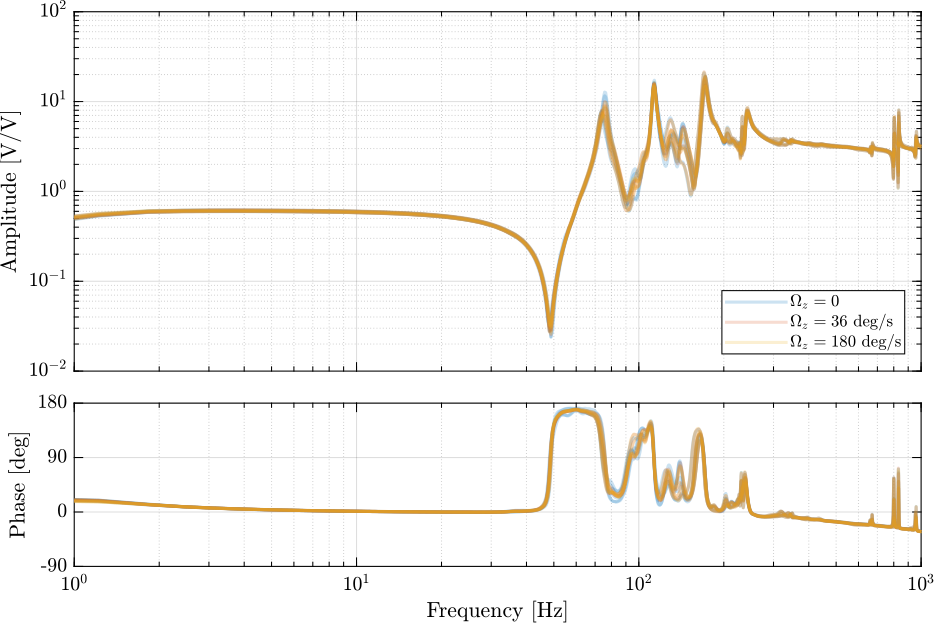
Effect of Mass
load('G_ol.mat', 'G_iff_m0', 'G_iff_m1', 'G_iff_m2', 'G_iff_m3', 'f');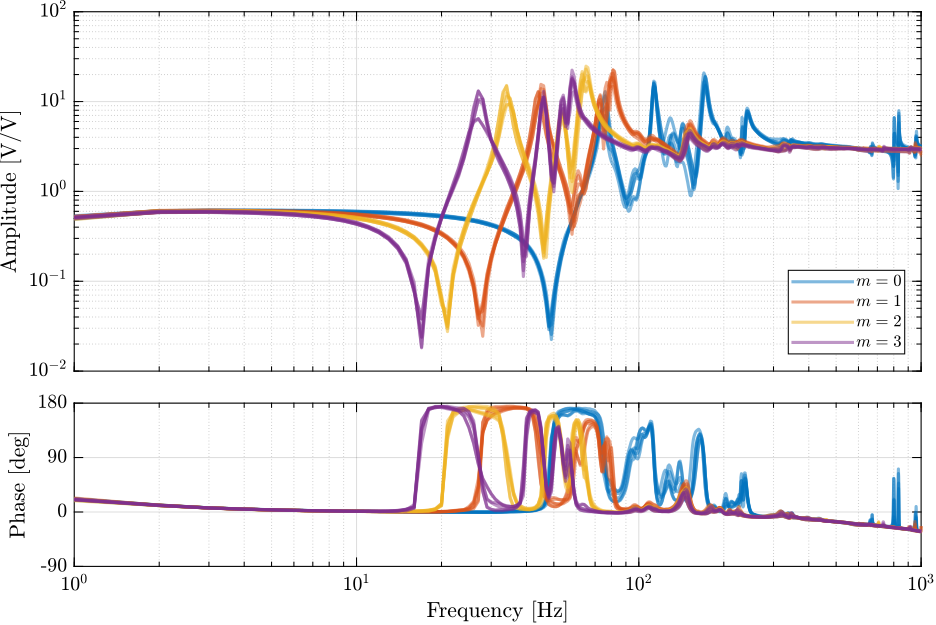
Compare with the model
load('Gm.mat')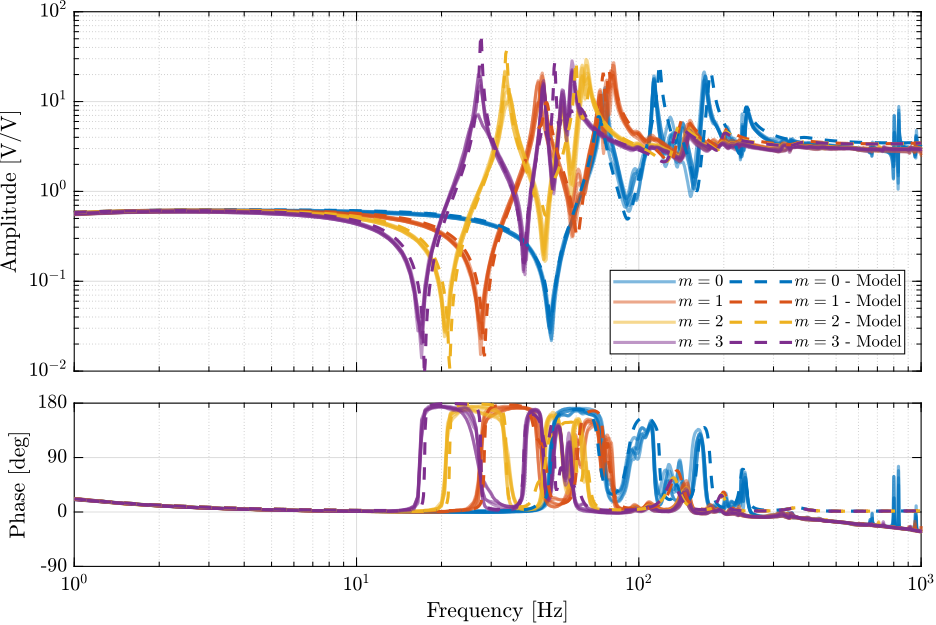
IFF Controller
Controller Design
Test second order high pass filter:
wz = 2*pi*10;
xiz = 0.7;
Ghpf = (s^2/wz^2)/(s^2/wz^2 + 2*xiz*s/wz + 1)
% s/(2*pi*1)/(1 + s/(2*pi*1)) * ... % HPF: reduce gain at low frequencyWe want integral action between 20Hz and 200Hz.
%% IFF Controller
Kiff = -1e2 * ... % Gain
1/(0.01*2*pi + s) * ... % LPF: provides integral action
Ghpf * ...
eye(6); % Diagonal 6x6 controller
Kiff.InputName = {'Fn1', 'Fn2', 'Fn3', 'Fn4', 'Fn5', 'Fn6'};
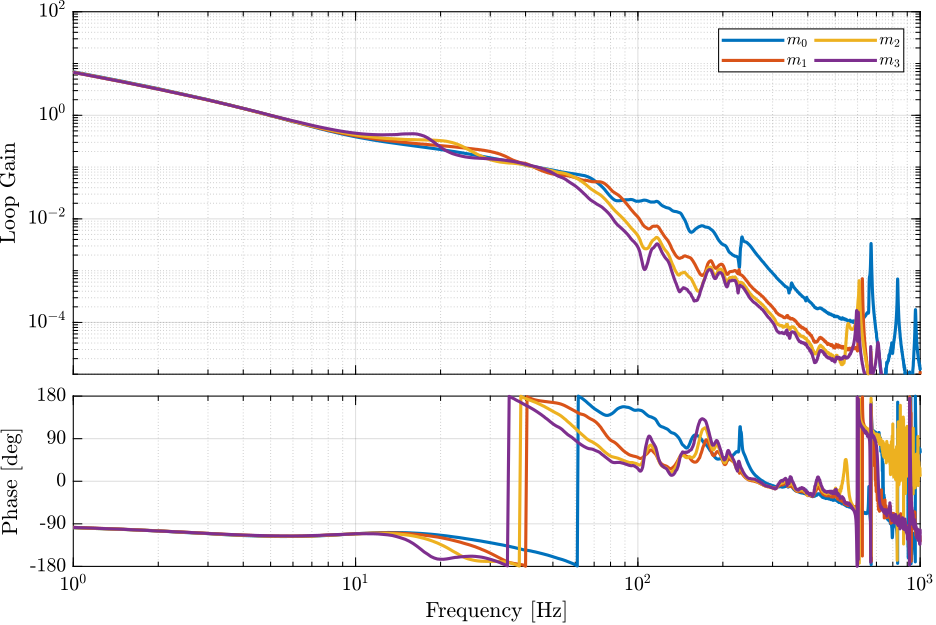
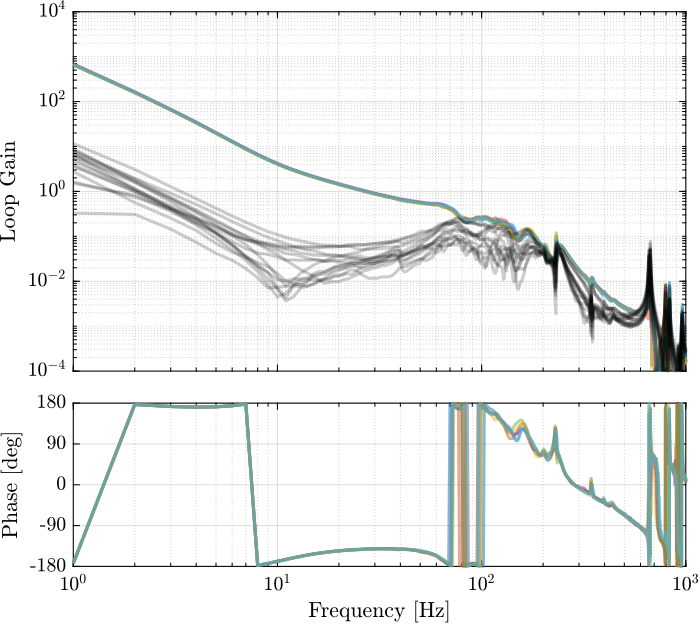
Kiff.OutputName = {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'};Loop Gain:
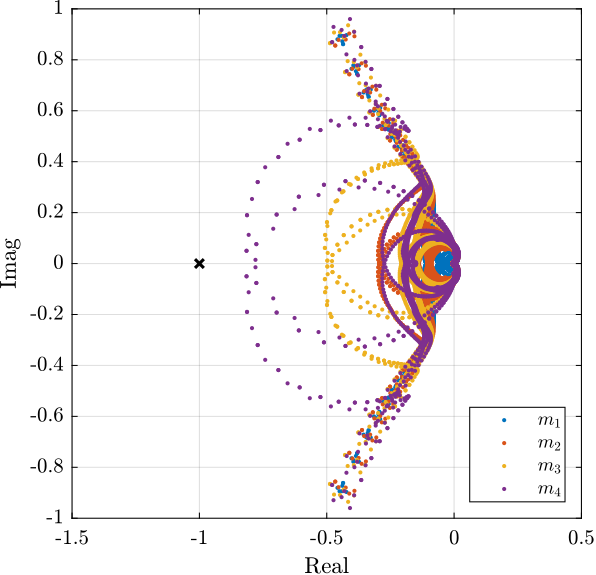
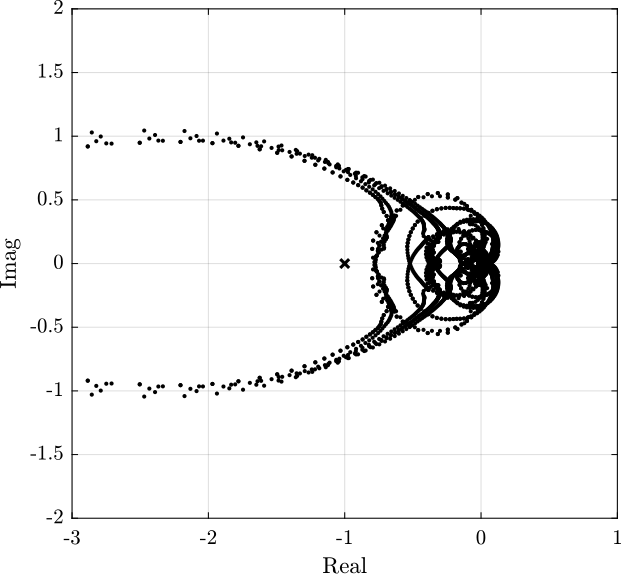
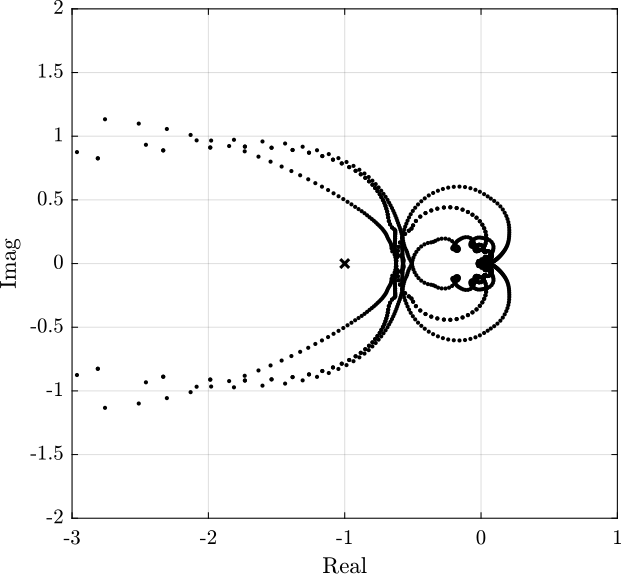
Root Locus to obtain optimal gain.
TODO Verify Stability
Verify Stability with Nyquist plot:
- Why bad stability margins?
Save Controller
save('./matlab/mat/K_iff.mat', 'Kiff')Estimated Damped Plant
%% Damped plant from Simscape model
Gm_hac_m0 = -feedback(Gm_m0, Kiff, 'name', +1);
Gm_hac_m1 = -feedback(Gm_m1, Kiff, 'name', +1);
Gm_hac_m2 = -feedback(Gm_m2, Kiff, 'name', +1);
Gm_hac_m3 = -feedback(Gm_m3, Kiff, 'name', +1);%% Verify Stability
isstable(Gm_hac_m0)
isstable(Gm_hac_m1)
isstable(Gm_hac_m2)
isstable(Gm_hac_m3)%% Save Damped Plants
save('./matlab/mat/Gm.mat', 'Gm_hac_m0', 'Gm_hac_m1', 'Gm_hac_m2', 'Gm_hac_m3', '-append');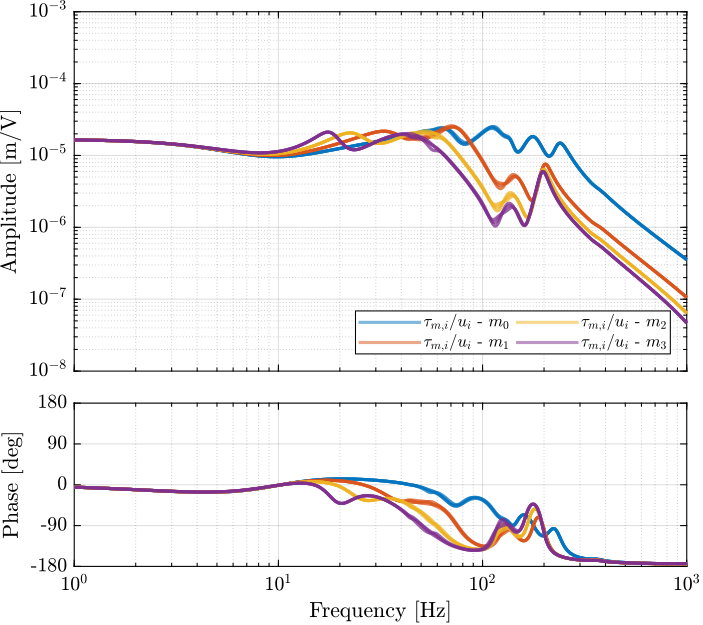
High Authority Control
<<sec:id31_iff_hac>>
Introduction ignore
Identify Spurious modes
%% Load identification data
data = load(sprintf('%s/dynamics/2023-08-10_18-32_identify_spurious_modes.mat', mat_dir));HAC Plants
Introduction ignore
6x6 Plant
%% Load identification data
data = load(sprintf('%s/dynamics/2023-08-17_17-53_damp_plant_m0_Wz0.mat', mat_dir));Compare with Model:
load('Gm.mat');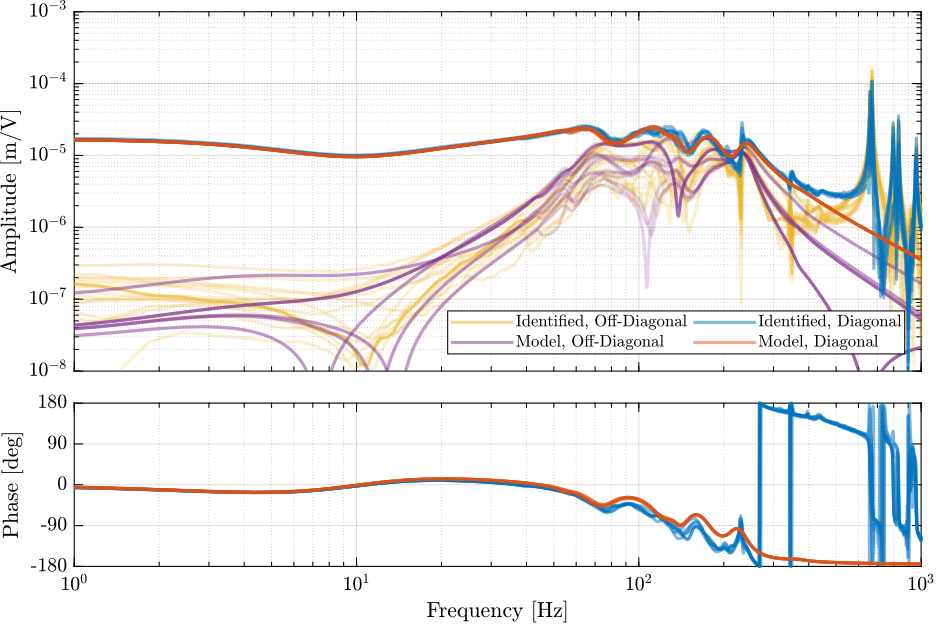
Effect of Mass
%% Load identification data
data_m0 = load(sprintf('%s/dynamics/2023-08-17_17-53_damp_plant_m0_Wz0.mat', mat_dir));
data_m1 = load(sprintf('%s/dynamics/2023-08-10_16-01_damp_plant_m1_Wz0.mat', mat_dir));
data_m2 = load(sprintf('%s/dynamics/2023-08-10_17-28_damp_plant_m2_Wz0.mat', mat_dir));
data_m3 = load(sprintf('%s/dynamics/2023-08-10_18-16_damp_plant_m3_Wz0.mat', mat_dir));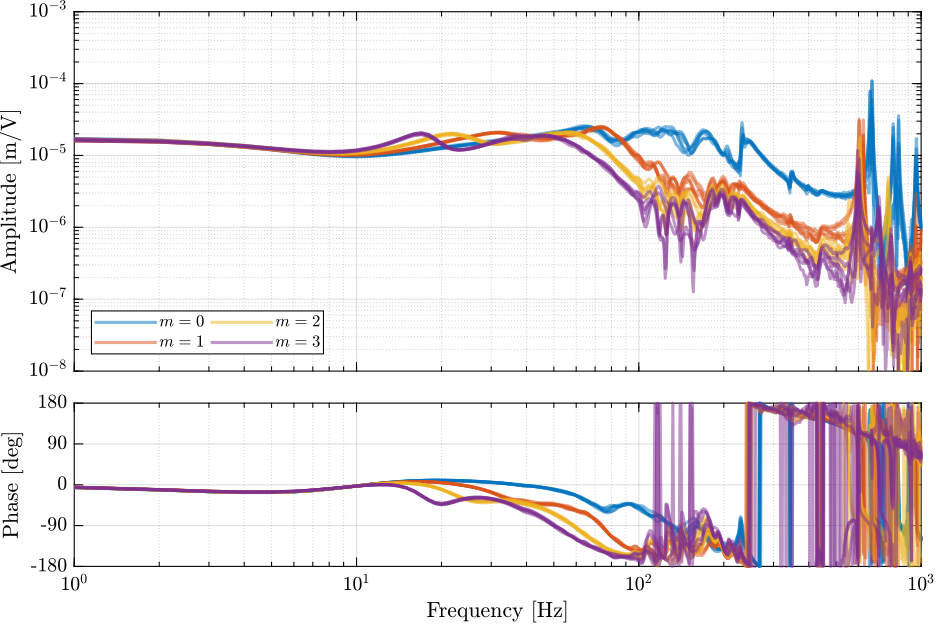
Compare with the model
load('G_hac.mat')
load('Gm.mat')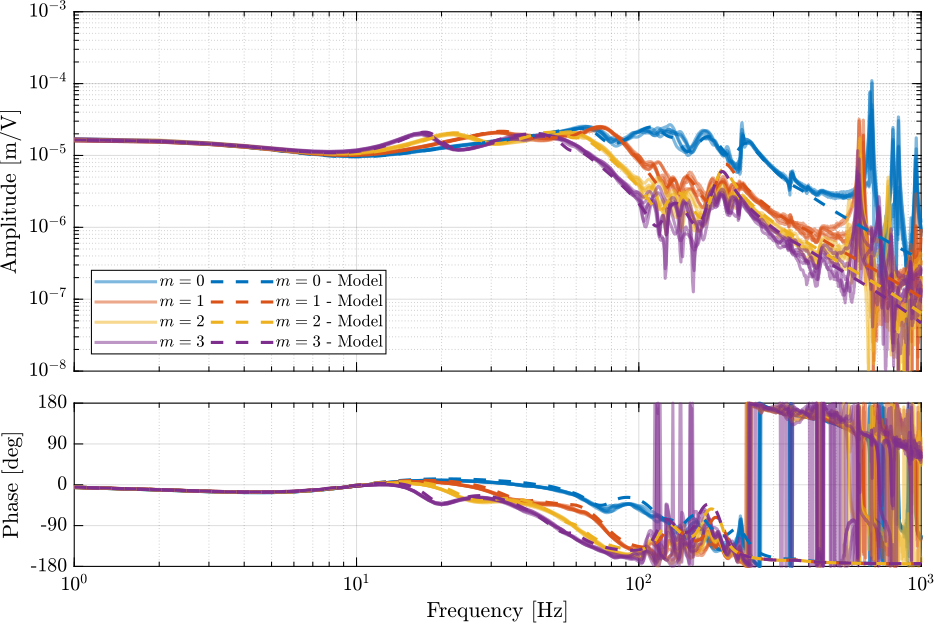
Comparison with Undamped plant
load('G_ol.mat');
load('G_hac.mat');
Robust HAC
load('G_hac.mat')
load('Gm.mat')Controller design
%% Wanted crossover
wc = 2*pi*5;
%% Double Integrator
% H_int = (wc^2)/(s + 1e-1*2*pi)^2;
H_int = wc/s;
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/30);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = 1./abs(G_hac_m0(i_f, 1, 1));
%% Decentralized HAC
Khac = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Integrator
eye(6); % 6x6 DiagonalLoop gain
Verify Stability
Estimated performances
Save Controller
save('./matlab/mat/K_hac.mat', 'Khac')High Performance HAC
Introduction ignore
The goal is to make a controller specific for one mass in order to have high bandwidth.
Mass 0
Load Plant
load('G_hac.mat')
load('Gm.mat')Plant
Controller design
%% Wanted crossover
wc = 2*pi*50;
%% Double Integrator
H_int = 1/(s + 0.1*2*pi) * ...
1/(0.1*2*pi + s);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
% H_int = wc/s;
%% Lead to increase phase margin
a = 3; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
a = 3; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead/sqrt(a)*(1 + s/(2.5*wc/sqrt(a)))/(1 + s/(2.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/500);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = 1./abs(G_hac_m0(i_f, 1, 1));
%% Decentralized HAC
Khac = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead * ... % Integrator
eye(6); % 6x6 Diagonal
Khac.InputName = {'eL1', 'eL2', 'eL3', 'eL4', 'eL5', 'eL6'};
Khac.OutputName = {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'};Loop gain
Verify Stability
Estimated performances
Loop gain with model
Gm_cl_m0 = feedback(Gm_hac_m0, 0.8*Khac, 'name', -1);isstable(Gm_cl_m0)Save Controller
Experimental Validation
data_1rpm = load(sprintf('%s/scans/2023-08-18_10-43_m0_1rpm.mat', mat_dir));
data_30rpm = load(sprintf('%s/scans/2023-08-18_10-45_m0_30rpm.mat', mat_dir));| Dy [nm] | Dz [nm] | Ry [urad] | |
|---|---|---|---|
| 1rpm | 55.3 | 5.9 | 0.1 |
| 30rpm | 85.2 | 12.5 | 0.3 |
Closed-Loop identification
data_cl = load(sprintf('%s/dynamics/2023-08-18_11-03_m0_perf_hac.mat', mat_dir));Mass 1
Load Plant
load('G_hac.mat')
load('Gm.mat')Plant
Plant Inverse
Gm_hac_red_m1 = flipRphZeros(-balred(Gm_hac_m1('eL1', 'u1'), 6, ...
balredOptions('StateProjection', 'MatchDC', ...
'FreqIntervals', [0, 80])));%% Plant Inverse
Gm_hac_inv_m1 = inv(Gm_hac_red_m1);Controller design
%% Wanted crossover
wc = 2*pi*30;
%% Double Integrator
H_int = 1/(s + 0.1*2*pi) * ...
(50*2*pi + s)/(0.01*2*pi + s);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
% H_int = wc/s;
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/200);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = 1./abs(G_hac_m0(i_f, 1, 1));
%% Decentralized HAC
Khac = 0.8*H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead * ... % Integrator
eye(6); % 6x6 Diagonal
Khac.InputName = {'eL1', 'eL2', 'eL3', 'eL4', 'eL5', 'eL6'};
Khac.OutputName = {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'};Loop gain
Verify Stability
Estimated performances
Loop gain with model
Gm_cl_m0 = feedback(Gm_hac_m0, Khac, 'name', +1);isstable(Gm_hac_m0)Save Controller
Tomography - Performances
First scan with closed-loop at middle
data = load(sprintf('%s/scans/2023-08-17_15-22_tomography_30rpm_m0_robust.mat', mat_dir));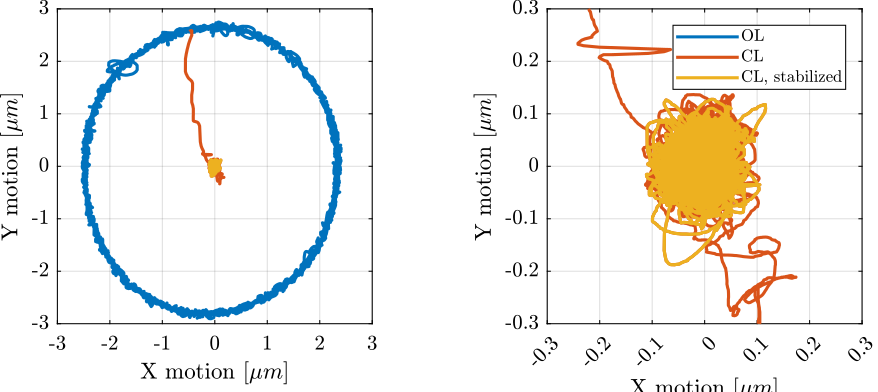
Slow Rotation - 6RPM
%% Load measured noise
data_ol = load(sprintf('%s/freq_analysis/2023-08-11_17-18_m0_lac_off_1rpm.mat', mat_dir));
data_lac = load(sprintf('%s/freq_analysis/2023-08-11_17-16_m0_lac_on_1rpm.mat', mat_dir));
data_hac = load(sprintf('%s/freq_analysis/2023-08-11_17-14_m0_hac_on_1rpm.mat', mat_dir));%% Coordinate transform
J_int_to_X = [ 0 0 -0.787401574803149 -0.212598425196851 0;
0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
-13.1233595800525 13.1233595800525 0 0 0;
0 0 -13.1233595800525 13.1233595800525 0];
a = J_int_to_X*[data_ol.d1; data_ol.d2; data_ol.d3; data_ol.d4; data_ol.d5];
data_ol.Dx_int = a(1,:);
data_ol.Dy_int = a(2,:);
data_ol.Dz_int = a(3,:);
data_ol.Rx_int = a(4,:);
data_ol.Ry_int = a(5,:);
a = J_int_to_X*[data_lac.d1; data_lac.d2; data_lac.d3; data_lac.d4; data_lac.d5];
data_lac.Dx_int = a(1,:);
data_lac.Dy_int = a(2,:);
data_lac.Dz_int = a(3,:);
data_lac.Rx_int = a(4,:);
data_lac.Ry_int = a(5,:);
a = J_int_to_X*[data_hac.d1; data_hac.d2; data_hac.d3; data_hac.d4; data_hac.d5];
data_hac.Dx_int = a(1,:);
data_hac.Dy_int = a(2,:);
data_hac.Dz_int = a(3,:);
data_hac.Rx_int = a(4,:);
data_hac.Ry_int = a(5,:);Rapid Rotation - 30RPM
%% Load measured noise
data_ol = load(sprintf('%s/freq_analysis/2023-08-11_17-39_m0_lac_off_30rpm.mat', mat_dir));
data_lac = load(sprintf('%s/freq_analysis/2023-08-11_17-36_m0_lac_on_30rpm.mat', mat_dir));
data_hac = load(sprintf('%s/freq_analysis/2023-08-11_17-34_m0_hac_on_30rpm.mat', mat_dir));%% Coordinate transform
J_int_to_X = [ 0 0 -0.787401574803149 -0.212598425196851 0;
0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
-13.1233595800525 13.1233595800525 0 0 0;
0 0 -13.1233595800525 13.1233595800525 0];
a = J_int_to_X*[data_ol.d1; data_ol.d2; data_ol.d3; data_ol.d4; data_ol.d5];
data_ol.Dx_int = a(1,:);
data_ol.Dy_int = a(2,:);
data_ol.Dz_int = a(3,:);
data_ol.Rx_int = a(4,:);
data_ol.Ry_int = a(5,:);
a = J_int_to_X*[data_lac.d1; data_lac.d2; data_lac.d3; data_lac.d4; data_lac.d5];
data_lac.Dx_int = a(1,:);
data_lac.Dy_int = a(2,:);
data_lac.Dz_int = a(3,:);
data_lac.Rx_int = a(4,:);
data_lac.Ry_int = a(5,:);
a = J_int_to_X*[data_hac.d1; data_hac.d2; data_hac.d3; data_hac.d4; data_hac.d5];
data_hac.Dx_int = a(1,:);
data_hac.Dy_int = a(2,:);
data_hac.Dz_int = a(3,:);
data_hac.Rx_int = a(4,:);
data_hac.Ry_int = a(5,:);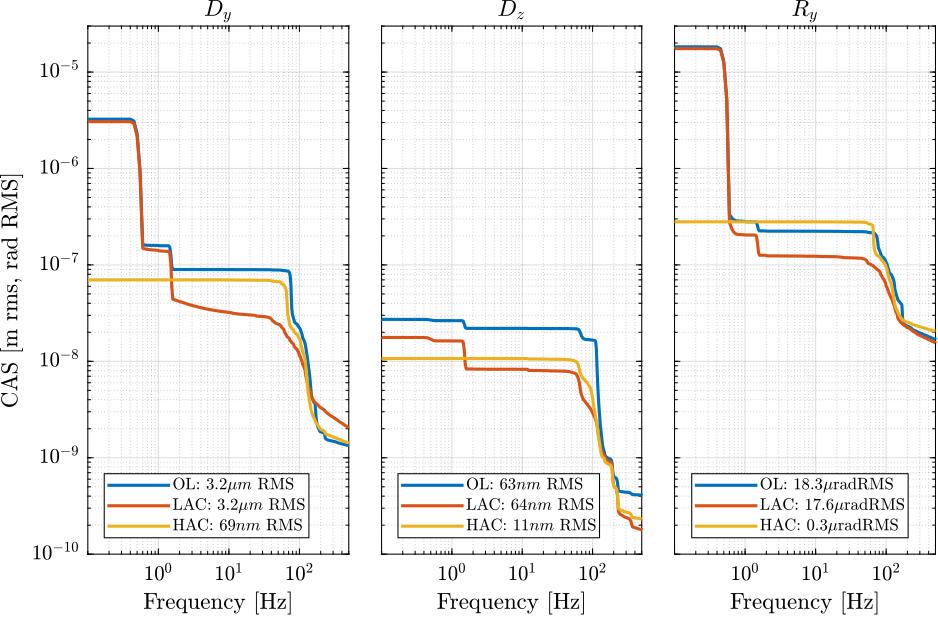
6DoF Control in Cartesian plane (rotating with the nano-hexapod)
<<sec:id31_cart_hac_rot>>
Introduction ignore
As only Dy, Dz and Ry directions are important, we could only control them. This lead to a 3x3 plant that may be more decoupled than the 6x6 plant.
5x5 plant in Cartesian plane
%% Jacobian for 3x3 plant
n_hexapod = initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
Jt_inv = pinv(n_hexapod.geometry.J');
Jt_inv = Jt_inv(:,[1,2,3,4,5]);
J_int_to_X = [ 0 0 -0.787401574803149 -0.212598425196851 0;
0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
-13.1233595800525 13.1233595800525 0 0 0;
0 0 -13.1233595800525 13.1233595800525 0];Compute identified plant in the Cartesian plane:
%% Load Data
% data_m0 = load(sprintf('%s/dynamics/2023-08-17_10-44_lac_plant_m0_Wz0_interf.mat', mat_dir));
%% New data after calibrating the Rz-offset
data_m0 = load(sprintf('%s/dynamics/2023-08-17_16-23_lac_plant_m0_Wz0_interf_Rz_align.mat', mat_dir));Compute plant model in the Cartesian plane:
Gm_cart = J_int_to_X*Gm_hac_m0({'d1', 'd2', 'd3', 'd4', 'd5'}, {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'})*Jt_inv;
Gm_cart.InputName = {'Fx', 'Fy', 'Fz', 'Mx', 'My'};
Gm_cart.OutputName = {'Dx', 'Dy', 'Dz', 'Rx', 'Ry'};Controller Design
%% Wanted crossover
wc = 2*pi*30;
%% Double Integrator
H_int = 1/(s + 1*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,1,1));
%% Decentralized HAC
Khac_Dx = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % Integrator%% Wanted crossover
wc = 2*pi*30;
%% Double Integrator
H_int = 1/(s + 1*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,2,2));
%% Decentralized HAC
Khac_Dy = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % Integrator%% Wanted crossover
wc = 2*pi*40;
%% Double Integrator
H_int = 1/(s + 2*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,3,3));
%% Decentralized HAC
Khac_Dz = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % Integrator%% Wanted crossover
wc = 2*pi*10;
%% Double Integrator
H_int = 1/(s + 1.5*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,4,4));
%% Decentralized HAC
Khac_Rx = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % Integrator%% Wanted crossover
wc = 2*pi*10;
%% Double Integrator
H_int = 1/(s + 1.5*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,5,5));
%% Decentralized HAC
Khac_Ry = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % IntegratorKhac = blkdiag(Khac_Dx, Khac_Dy, Khac_Dz, Khac_Rx, Khac_Ry);Check Stability
Save controllers
Performances
2023-08-18_18-33_m0_1rpm_K_cart.mat
3DoF Control in Cartesian plane (fixed)
<<sec:id31_cart_hac_fix>>
Introduction ignore
As only Dy, Dz and Ry directions are important, we could only control them. This lead to a 3x3 plant that may be more decoupled than the 6x6 plant.
3x3 plant in Cartesian plane
%% Jacobian for 3x3 plant
n_hexapod = initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
Jt_inv = pinv(n_hexapod.geometry.J');
J_int_to_X = [0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
0 0 -13.1233595800525 13.1233595800525 0];Compute identified plant in the Cartesian plane:
%% Load Data
% data_m0 = load(sprintf('%s/dynamics/2023-08-17_10-44_lac_plant_m0_Wz0_interf.mat', mat_dir));
%% New data after calibrating the Rz-offset
data_m0 = load(sprintf('%s/dynamics/2023-08-17_16-23_lac_plant_m0_Wz0_interf_Rz_align.mat', mat_dir));Compute plant model in the Cartesian plane:
Gm_cart = J_int_to_X*Gm_hac_m0({'d1', 'd2', 'd3', 'd4', 'd5'}, {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'})*Jt_inv(:,[2,3,5]);
Gm_cart.InputName = {'Fy', 'Fz', 'My'};
Gm_cart.OutputName = {'Dy', 'Dz', 'Ry'};Diagonal elements are matching quite well, but off-diagonal elements are very different.
Why so much more coupling than from the model?
- Is it due to the metrology? The spheres could induce coupling as for instance X motion will also be seen as Z motion. This is especially true if not well centered with the sphere (as seemed to be the case for the lateral interferometers).
Normalization of outputs:
Gm_cart_normalized = -diag(1./diag(dcgain(Gm_cart)))*Gm_cart;
Gm_cart_normalized.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_normalized.OutputName = {'Dy', 'Dz', 'Ry'};
G_cart_normalized = permute(pagemtimes(-diag(1./diag(dcgain(Gm_cart))), permute(G_cart, [2,3,1])), [3,1,2]);Controller Design
Dy
%% Wanted crossover
wc = 2*pi*30;
%% Double Integrator
H_int = 1/(s + 0.1*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,1,1));
%% Decentralized HAC
Khac_Dy = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % IntegratorDz
%% Wanted crossover
wc = 2*pi*50;
%% Double Integrator
H_int = 1/(s + 0.1*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,2,2));
%% Decentralized HAC
Khac_Dz = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % IntegratorRy
%% Wanted crossover
wc = 2*pi*30;
%% Double Integrator
H_int = 1/(s + 0.1*2*pi) * ...
1/(s + 0.01*2*pi);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = H_lead*1/sqrt(a)*(1 + s/(1.5*wc/sqrt(a)))/(1 + s/(1.5*wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/300);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = -1./abs(G_cart(i_f,3,3));
%% Decentralized HAC
Khac_Ry = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead; % Integrator3x3 controller
Khac = blkdiag(Khac_Dy, Khac_Dz, Khac_Ry);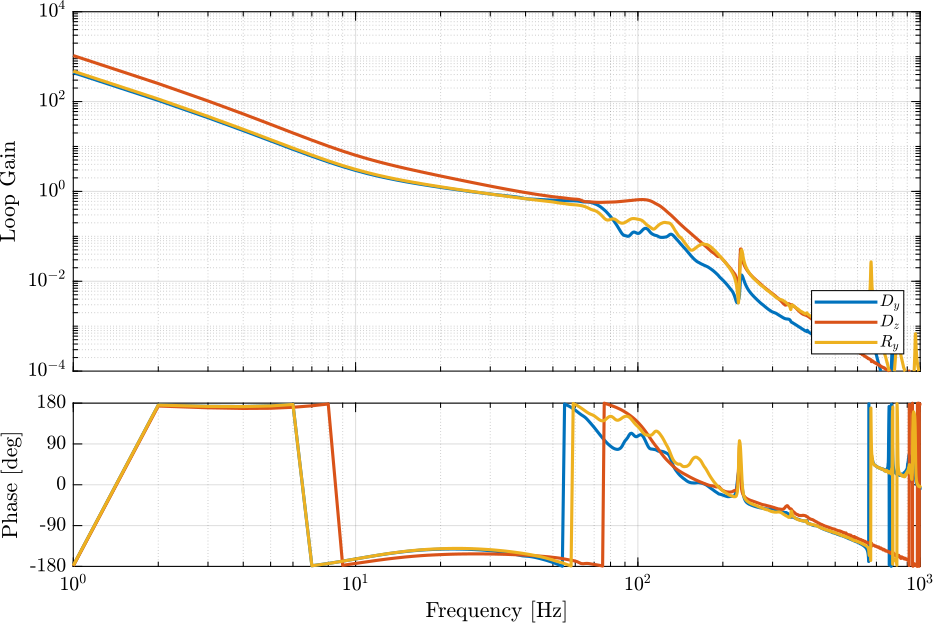
Check Stability
Save controllers
Save Controller
Controller Design (normalized)
%% Wanted crossover
wc = 2*pi*30;
%% Double Integrator
H_int = 1/(s + 0.1*2*pi) * ...
(50*2*pi + s)/(0.01*2*pi + s);
H_int = H_int/abs(evalfr(H_int, 1j*wc));
% H_int = wc/s;
%% Lead to increase phase margin
a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
H_lead = 1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
% a = 2; % Amount of phase lead / width of the phase lead / high frequency gain
% H_lead = H_lead*1/sqrt(a)*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a)));
%% Low Pass filter to increase robustness
H_lpf = 1/(1 + s/2/pi/200);
%% Notch at the top-plate resonance
% gm = 0.02;
% xi = 0.3;
% wn = 2*pi*665;
% H_notch = (s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
%% Gain to have unitary crossover at 30Hz
[~, i_f] = min(abs(f - wc/2/pi));
H_gain = 1./abs(G_cart_normalized(i_f, 1, 1));
%% Decentralized HAC
Khac = H_gain * ... % Gain
H_int * ... % Integrator
H_lpf * ... % Low Pass Filter
H_lead * ... % Integrator
eye(3); % 6x6 Diagonal
% Khac.InputName = {'eL1', 'eL2', 'eL3', 'eL4', 'eL5', 'eL6'};
% Khac.OutputName = {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'};Verify Stability
Control Performances
data_cl = load(sprintf('%s/dynamics/2023-08-21_10-36_m0_cart_fixed.mat', mat_dir));- Compare with estimated performances
Complementary Filter Control
<<sec:id31_cart_hac_complementary_filter>>
m0
3x3 plant in Cartesian plane
%% Jacobian for 3x3 plant
n_hexapod = initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
Jt_inv = pinv(n_hexapod.geometry.J');
J_int_to_X = [0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
0 0 -13.1233595800525 13.1233595800525 0];Compute identified plant in the Cartesian plane:
%% New data after calibrating the Rz-offset
data_m0 = load(sprintf('%s/dynamics/2023-08-21_13-32_damp_plant_m0.mat', mat_dir));Compute plant model in the Cartesian plane:
Gm_cart = J_int_to_X*Gm_hac_m0({'d1', 'd2', 'd3', 'd4', 'd5'}, {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'})*Jt_inv(:,[2,3,5]);
Gm_cart.InputName = {'Fy', 'Fz', 'My'};
Gm_cart.OutputName = {'Dy', 'Dz', 'Ry'};Plant Invert
Reduce model size
Gm_cart_dy = flipRphZeros(balred(-Gm_cart('Dy', 'Fy'), 10));
Gm_cart_dz = flipRphZeros(balred(-Gm_cart('Dz', 'Fz'), 10));
Gm_cart_ry = flipRphZeros(balred(-Gm_cart('Ry', 'My'), 10));Add first resonance
% gm = 200;
% xi = 0.003;
% wn = 2*pi*670;
% Gm_cart_dy = Gm_cart_dy*(s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
% gm = 200;
% xi = 0.003;
% wn = 2*pi*1086;
% Gm_cart_dz = Gm_cart_dz*(s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);
% gm = 200;
% xi = 0.003;
% wn = 2*pi*670;
% Gm_cart_ry = Gm_cart_ry*(s^2 + 2*gm*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2);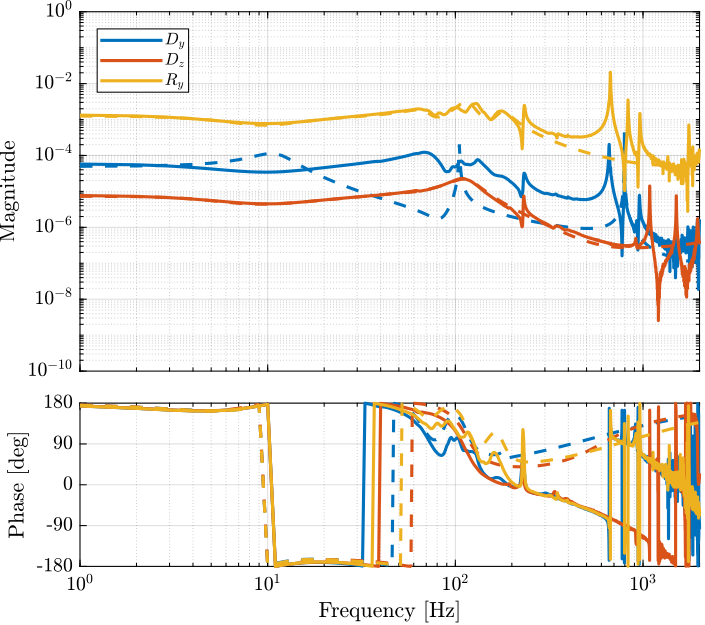
Invert and make realizable
Gm_cart_dy_inv = inv(Gm_cart_dy);
Gm_cart_dz_inv = inv(Gm_cart_dz);
Gm_cart_ry_inv = inv(Gm_cart_ry);isstable(Gm_cart_dy_inv)
isstable(Gm_cart_dz_inv)
isstable(Gm_cart_ry_inv)Save Plant Inverse
Control Performances
5Hz
data_cl = load(sprintf('%s/dynamics/2023-08-21_10-59_m0_cf_5Hz.mat', mat_dir));- Compare with estimated performances
20Hz
data_cl = load(sprintf('%s/dynamics/2023-08-21_11-04_m0_cf_20Hz.mat', mat_dir));- Compare with estimated performances
Different bandwidth for different directions
data_cl = load(sprintf('%s/dynamics/2023-08-21_11-16_m0_cf_different.mat', mat_dir));- Compare with estimated performances
Dz 25Hz
data_cl = load(sprintf('%s/dynamics/', mat_dir));- Compare with estimated performances
Better plant invert
Dy
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart(f>2&f<800,1,1).', 1i*2*pi*f(f>2&f<800)', poles, 1./(f(f>2&f<800))', opts);
end
Gfit_dy = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dy = inv(-flipRphZeros(Gfit_dy))/(1 + s/2/pi/1e3);
isstable(Ginv_dy)Dz
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart(f>2&f<1500,2,2).', 1i*2*pi*f(f>2&f<1500)', poles, 1./(f(f>2&f<1500))', opts);
end
Gfit_dz = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dz = inv(-flipRphZeros(Gfit_dz))/(1 + s/2/pi/1e3);
isstable(Ginv_dz)Ry
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart(f>2&f<800,3,3).', 1i*2*pi*f(f>2&f<800)', poles, 1./(f(f>2&f<800))', opts);
end
Gfit_ry = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_ry = inv(flipRphZeros(Gfit_ry))/(1 + s/2/pi/1e3);
isstable(Ginv_ry)Compare Invert plants
Save plant inverse
Compare Digital Invert plants
Control Performances
Better plant invert
data_cl = load(sprintf('%s/dynamics/2023-08-21_13-36_m0_cf_inv_fit.mat', mat_dir));Scans with good controller
1rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-28_m0_1rpm_K_cf.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 796 | 20 | 8 | 8209 | 73 |
30rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-33_m0_30rpm_cf_control.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 820 | 39 | 13 | 7790 | 156 |
m1
3x3 plant in Cartesian plane
%% Jacobian for 3x3 plant
n_hexapod = initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
Jt_inv = pinv(n_hexapod.geometry.J');
J_int_to_X = [0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
0 0 -13.1233595800525 13.1233595800525 0];Compute identified plant in the Cartesian plane:
%% New data after calibrating the Rz-offset
data_m1 = load(sprintf('%s/dynamics/2023-08-21_19-05_damp_plant_m1_new_Rz.mat', mat_dir));Compute plant model in the Cartesian plane:
Gm_cart_m1 = J_int_to_X*Gm_hac_m1({'d1', 'd2', 'd3', 'd4', 'd5'}, {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'})*Jt_inv(:,[2,3,5]);
Gm_cart_m1.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_m1.OutputName = {'Dy', 'Dz', 'Ry'};Normalization of outputs:
Gm_cart_m1_normalized = -diag(1./diag(dcgain(Gm_cart_m1)))*Gm_cart_m1;
Gm_cart_m1_normalized.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_m1_normalized.OutputName = {'Dy', 'Dz', 'Ry'};
G_cart_m1_normalized = permute(pagemtimes(-diag(1./diag(dcgain(Gm_cart_m1))), permute(G_cart_m1, [2,3,1])), [3,1,2]);Better plant invert
N = 9; %Order of approximationDy
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m1(f>1&f<1500,1,1).', 1i*2*pi*f(f>1&f<1500)', poles, 1./sqrt(f(f>1&f<1500))', opts);
end
Gfit_dy = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dy = inv(flipRphZeros(Gfit_dy))/(1 + s/2/pi/1e3);
isstable(Ginv_dy)Dz
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m1(f>2&f<1500,2,2).', 1i*2*pi*f(f>2&f<1500)', poles, 1./sqrt(f(f>2&f<1500))', opts);
end
Gfit_dz = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dz = inv(-flipRphZeros(Gfit_dz))/(1 + s/2/pi/1e3);
isstable(Ginv_dz)Ry
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m1(f>2&f<800,3,3).', 1i*2*pi*f(f>2&f<800)', poles, 1./(f(f>2&f<800))', opts);
end
Gfit_ry = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_ry = inv(flipRphZeros(Gfit_ry))/(1 + s/2/pi/1e3);
isstable(Ginv_ry)Compare Invert plants
Save plant inverse
Compare Digital Invert plants
TODO Control Performances
Better plant invert
data_cl = load(sprintf('%s/dynamics/2023-08-21_13-36_m0_cf_inv_fit.mat', mat_dir));TODO Scans with good controller
1rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-28_m0_1rpm_K_cf.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 796 | 20 | 8 | 8209 | 73 |
30rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-33_m0_30rpm_cf_control.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 820 | 39 | 13 | 7790 | 156 |
m2
3x3 plant in Cartesian plane
%% Jacobian for 3x3 plant
n_hexapod = initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
Jt_inv = pinv(n_hexapod.geometry.J');
J_int_to_X = [0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
0 0 -13.1233595800525 13.1233595800525 0];Compute identified plant in the Cartesian plane:
%% New data after calibrating the Rz-offset
data_m2 = load(sprintf('%s/dynamics/2023-08-21_17-32_damp_plant_m2_new_Rz.mat', mat_dir));Compute plant model in the Cartesian plane:
Gm_cart_m2 = J_int_to_X*Gm_hac_m2({'d1', 'd2', 'd3', 'd4', 'd5'}, {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'})*Jt_inv(:,[2,3,5]);
Gm_cart_m2.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_m2.OutputName = {'Dy', 'Dz', 'Ry'};Normalization of outputs:
Gm_cart_m2_normalized = -diag(1./diag(dcgain(Gm_cart_m2)))*Gm_cart_m2;
Gm_cart_m2_normalized.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_m2_normalized.OutputName = {'Dy', 'Dz', 'Ry'};
G_cart_m2_normalized = permute(pagemtimes(-diag(1./diag(dcgain(Gm_cart_m2))), permute(G_cart_m2, [2,3,1])), [3,1,2]);Better plant invert
N = 9; %Order of approximationDy
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m2(f>1&f<1500,1,1).', 1i*2*pi*f(f>1&f<1500)', poles, 1./sqrt(f(f>1&f<1500))', opts);
end
Gfit_dy = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dy = inv(-flipRphZeros(Gfit_dy))/(1 + s/2/pi/1e3);
isstable(Ginv_dy)Dz
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m2(f>2&f<1500,2,2).', 1i*2*pi*f(f>2&f<1500)', poles, 1./(f(f>2&f<1500))', opts);
end
Gfit_dz = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dz = inv(-flipRphZeros(Gfit_dz))/(1 + s/2/pi/1e3);
isstable(Ginv_dz)Ry
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m2(f>2&f<800,3,3).', 1i*2*pi*f(f>2&f<800)', poles, 1./(f(f>2&f<800))', opts);
end
Gfit_ry = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_ry = inv(-flipRphZeros(Gfit_ry))/(1 + s/2/pi/1e3);
isstable(Ginv_ry)Compare Invert plants
Save plant inverse
Compare Digital Invert plants
TODO Control Performances
Better plant invert
data_cl = load(sprintf('%s/dynamics/2023-08-21_13-36_m0_cf_inv_fit.mat', mat_dir));TODO Scans with good controller
1rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-28_m0_1rpm_K_cf.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 796 | 20 | 8 | 8209 | 73 |
30rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-33_m0_30rpm_cf_control.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 820 | 39 | 13 | 7790 | 156 |
m3
3x3 plant in Cartesian plane
%% Jacobian for 3x3 plant
n_hexapod = initializeNanoHexapod('flex_bot_type', '2dof', ...
'flex_top_type', '3dof', ...
'motion_sensor_type', 'plates', ...
'actuator_type', '2dof');
Jt_inv = pinv(n_hexapod.geometry.J');
J_int_to_X = [0.78740157480315 0.21259842519685 0 0 0;
0 0 0 0 -1;
0 0 -13.1233595800525 13.1233595800525 0];Compute identified plant in the Cartesian plane:
%% New data after calibrating the Rz-offset
data_m3 = load(sprintf('%s/dynamics/2023-08-21_16-33_damp_plant_m3_new_Rz_fast.mat', mat_dir));Compute plant model in the Cartesian plane:
Gm_cart_m3 = J_int_to_X*Gm_hac_m3({'d1', 'd2', 'd3', 'd4', 'd5'}, {'u1', 'u2', 'u3', 'u4', 'u5', 'u6'})*Jt_inv(:,[2,3,5]);
Gm_cart_m3.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_m3.OutputName = {'Dy', 'Dz', 'Ry'};Normalization of outputs:
Gm_cart_m3_normalized = -diag(1./diag(dcgain(Gm_cart_m3)))*Gm_cart_m3;
Gm_cart_m3_normalized.InputName = {'Fy', 'Fz', 'My'};
Gm_cart_m3_normalized.OutputName = {'Dy', 'Dz', 'Ry'};
G_cart_m3_normalized = permute(pagemtimes(-diag(1./diag(dcgain(Gm_cart_m3))), permute(G_cart_m3, [2,3,1])), [3,1,2]);Better plant invert
N = 9; %Order of approximationDy
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m3(f>2&f<800,1,1).', 1i*2*pi*f(f>2&f<800)', poles, 1./(f(f>2&f<800))', opts);
end
Gfit_dy = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dy = inv(flipRphZeros(Gfit_dy))/(1 + s/2/pi/1e3);
isstable(Ginv_dy)Dz
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m3(f>2&f<1500,2,2).', 1i*2*pi*f(f>2&f<1500)', poles, 1./(f(f>2&f<1500))', opts);
end
Gfit_dz = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_dz = inv(-flipRphZeros(Gfit_dz))/(1 + s/2/pi/1e3);
isstable(Ginv_dz)Ry
%% Estimate resonance frequency and damping
for iter =1:Niter
[G_est, poles, ~, frf_est] = vectfit3(G_cart_m3(f>2&f<800,3,3).', 1i*2*pi*f(f>2&f<800)', poles, 1./(f(f>2&f<800))', opts);
end
Gfit_ry = ss(G_est.A, G_est.B, G_est.C, G_est.D);Stable Inverse
Ginv_ry = inv(-flipRphZeros(Gfit_ry))/(1 + s/2/pi/1e3);
isstable(Ginv_ry)Compare Invert plants
Save plant inverse
Compare Digital Invert plants
TODO Control Performances
Better plant invert
data_cl = load(sprintf('%s/dynamics/2023-08-21_13-36_m0_cf_inv_fit.mat', mat_dir));TODO Scans with good controller
1rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-28_m0_1rpm_K_cf.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 796 | 20 | 8 | 8209 | 73 |
30rpm
1RPM scans are performed for all the masses with the same controller.
data_m0 = load(sprintf("%s/scans/2023-08-21_14-33_m0_30rpm_cf_control.mat", mat_dir));
data_m0.time = Ts*[0:length(data_m0.Rz)-1];%% Compute RMS values while in closed-loop
data_m0.Dx_rms_cl = rms(detrend(data_m0.Dx_int, 0));
data_m0.Dy_rms_cl = rms(detrend(data_m0.Dy_int, 0));
data_m0.Dz_rms_cl = rms(detrend(data_m0.Dz_int, 0));
data_m0.Rx_rms_cl = rms(detrend(data_m0.Rx_int, 0));
data_m0.Ry_rms_cl = rms(detrend(data_m0.Ry_int, 0));| Dx [nm] | Dy [nm] | Dz [nm] | Rx [nrad] | Ry [nrad] | |
|---|---|---|---|---|---|
| m0 | 820 | 39 | 13 | 7790 | 156 |
Scans
<<sec:id31_scans>>
Introduction ignore
- Section ref:sec:id31_scans_tomography
- Section ref:sec:id31_scans_dz
- Section ref:sec:id31_scans_reflectivity
- Section ref:sec:id31_scans_dy
- Section ref:sec:id31_scans_diffraction_tomo
$R_z$ scans: Tomography
<<sec:id31_scans_tomography>>
Introduction ignore
m0: 30rpm, 6rpm, 1rpm m1: 6rpm, 1rpm m2: 6rpm, 1rpm m3: 1rpm
Robust Control - 1rpm
1RPM scans are performed for all the masses with the same robust controller.
%% Load Tomography scans with robust controller
data_tomo_1rpm_m0 = load(sprintf("%s/scans/2023-08-11_11-37_tomography_1rpm_m0.mat", mat_dir));
data_tomo_1rpm_m0.time = Ts*[0:length(data_tomo_1rpm_m0.Rz)-1];
data_tomo_1rpm_m1 = load(sprintf("%s/scans/2023-08-11_11-15_tomography_1rpm_m1.mat", mat_dir));
data_tomo_1rpm_m1.time = Ts*[0:length(data_tomo_1rpm_m1.Rz)-1];
data_tomo_1rpm_m2 = load(sprintf("%s/scans/2023-08-11_10-59_tomography_1rpm_m2.mat", mat_dir));
data_tomo_1rpm_m2.time = Ts*[0:length(data_tomo_1rpm_m2.Rz)-1];
data_tomo_1rpm_m3 = load(sprintf("%s/scans/2023-08-11_10-24_tomography_1rpm_m3.mat", mat_dir));
data_tomo_1rpm_m3.time = Ts*[0:length(data_tomo_1rpm_m3.Rz)-1];The problem for these scans is that the position initialization was not make properly, so the open-loop errors are quite large (see Figure ref:fig:id31_tomo_1rpm_robust_m0).
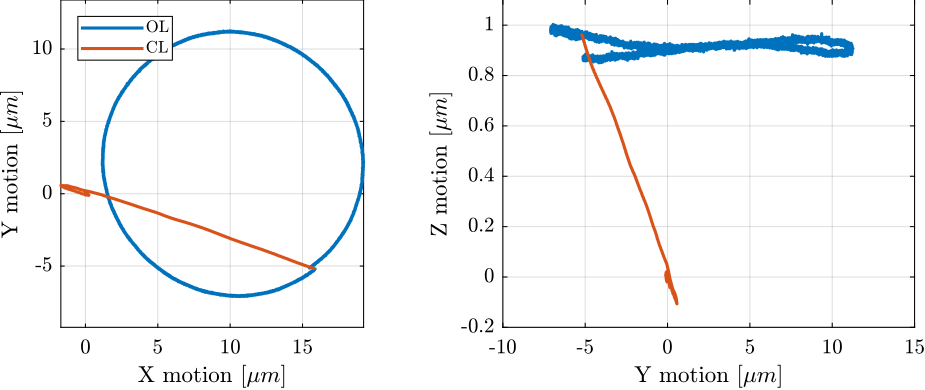
yztomographymovie('movies/tomography_1rpm_m0', data_tomo_1rpm_m0, 'xlim_ax1', [-10, 15], 'ylim_ax1', [-0.2, 1.2], 'xlim_ax2', [-300, 300], 'ylim_ax2', [-100, 100])
yztomographymovie('movies/tomography_1rpm_m0_di_5000', data_tomo_1rpm_m0, 'xlim_ax1', [-10, 15], 'ylim_ax1', [-0.2, 1.2], 'xlim_ax2', [-300, 300], 'ylim_ax2', [-100, 100], 'di', 5000)The obtained open-loop and closed-loop errors are shown in tables ref:tab:id31_tomo_1rpm_robust_ol_errors and ref:tab:id31_tomo_1rpm_robust_cl_errors respectively.
%% Compute RMS values while in closed-loop and open-loop
[~, i_m0] = find(data_tomo_1rpm_m0.hac_status == 1);
data_tomo_1rpm_m0.Dx_rms_cl = rms(detrend(data_tomo_1rpm_m0.Dx_int(i_m0+50000:end), 0));
data_tomo_1rpm_m0.Dy_rms_cl = rms(detrend(data_tomo_1rpm_m0.Dy_int(i_m0+50000:end), 0));
data_tomo_1rpm_m0.Dz_rms_cl = rms(detrend(data_tomo_1rpm_m0.Dz_int(i_m0+50000:end), 0));
data_tomo_1rpm_m0.Rx_rms_cl = rms(detrend(data_tomo_1rpm_m0.Rx_int(i_m0+50000:end), 0));
data_tomo_1rpm_m0.Ry_rms_cl = rms(detrend(data_tomo_1rpm_m0.Ry_int(i_m0+50000:end), 0));
data_tomo_1rpm_m0.Dx_rms_ol = rms(detrend(data_tomo_1rpm_m0.Dx_int(1:i_m0), 0));
data_tomo_1rpm_m0.Dy_rms_ol = rms(detrend(data_tomo_1rpm_m0.Dy_int(1:i_m0), 0));
data_tomo_1rpm_m0.Dz_rms_ol = rms(detrend(data_tomo_1rpm_m0.Dz_int(1:i_m0), 0));
data_tomo_1rpm_m0.Rx_rms_ol = rms(detrend(data_tomo_1rpm_m0.Rx_int(1:i_m0), 0));
data_tomo_1rpm_m0.Ry_rms_ol = rms(detrend(data_tomo_1rpm_m0.Ry_int(1:i_m0), 0));
%% Compute RMS values while in closed-loop and open-loop
[~, i_m1] = find(data_tomo_1rpm_m1.hac_status == 1);
data_tomo_1rpm_m1.Dx_rms_cl = rms(detrend(data_tomo_1rpm_m1.Dx_int(i_m1+50000:end), 0));
data_tomo_1rpm_m1.Dy_rms_cl = rms(detrend(data_tomo_1rpm_m1.Dy_int(i_m1+50000:end), 0));
data_tomo_1rpm_m1.Dz_rms_cl = rms(detrend(data_tomo_1rpm_m1.Dz_int(i_m1+50000:end), 0));
data_tomo_1rpm_m1.Rx_rms_cl = rms(detrend(data_tomo_1rpm_m1.Rx_int(i_m1+50000:end), 0));
data_tomo_1rpm_m1.Ry_rms_cl = rms(detrend(data_tomo_1rpm_m1.Ry_int(i_m1+50000:end), 0));
data_tomo_1rpm_m1.Dx_rms_ol = rms(detrend(data_tomo_1rpm_m1.Dx_int(1:i_m1), 0));
data_tomo_1rpm_m1.Dy_rms_ol = rms(detrend(data_tomo_1rpm_m1.Dy_int(1:i_m1), 0));
data_tomo_1rpm_m1.Dz_rms_ol = rms(detrend(data_tomo_1rpm_m1.Dz_int(1:i_m1), 0));
data_tomo_1rpm_m1.Rx_rms_ol = rms(detrend(data_tomo_1rpm_m1.Rx_int(1:i_m1), 0));
data_tomo_1rpm_m1.Ry_rms_ol = rms(detrend(data_tomo_1rpm_m1.Ry_int(1:i_m1), 0));
%% Compute RMS values while in closed-loop and open-loop
[~, i_m2] = find(data_tomo_1rpm_m2.hac_status == 1);
data_tomo_1rpm_m2.Dx_rms_cl = rms(detrend(data_tomo_1rpm_m2.Dx_int(i_m2+50000:end), 0));
data_tomo_1rpm_m2.Dy_rms_cl = rms(detrend(data_tomo_1rpm_m2.Dy_int(i_m2+50000:end), 0));
data_tomo_1rpm_m2.Dz_rms_cl = rms(detrend(data_tomo_1rpm_m2.Dz_int(i_m2+50000:end), 0));
data_tomo_1rpm_m2.Rx_rms_cl = rms(detrend(data_tomo_1rpm_m2.Rx_int(i_m2+50000:end), 0));
data_tomo_1rpm_m2.Ry_rms_cl = rms(detrend(data_tomo_1rpm_m2.Ry_int(i_m2+50000:end), 0));
data_tomo_1rpm_m2.Dx_rms_ol = rms(detrend(data_tomo_1rpm_m2.Dx_int(1:i_m2), 0));
data_tomo_1rpm_m2.Dy_rms_ol = rms(detrend(data_tomo_1rpm_m2.Dy_int(1:i_m2), 0));
data_tomo_1rpm_m2.Dz_rms_ol = rms(detrend(data_tomo_1rpm_m2.Dz_int(1:i_m2), 0));
data_tomo_1rpm_m2.Rx_rms_ol = rms(detrend(data_tomo_1rpm_m2.Rx_int(1:i_m2), 0));
data_tomo_1rpm_m2.Ry_rms_ol = rms(detrend(data_tomo_1rpm_m2.Ry_int(1:i_m2), 0));
%% Compute RMS values while in closed-loop and open-loop
[~, i_m3] = find(data_tomo_1rpm_m3.hac_status == 1);
data_tomo_1rpm_m3.Dx_rms_cl = rms(detrend(data_tomo_1rpm_m3.Dx_int(i_m3+50000:end), 0));
data_tomo_1rpm_m3.Dy_rms_cl = rms(detrend(data_tomo_1rpm_m3.Dy_int(i_m3+50000:end), 0));
data_tomo_1rpm_m3.Dz_rms_cl = rms(detrend(data_tomo_1rpm_m3.Dz_int(i_m3+50000:end), 0));
data_tomo_1rpm_m3.Rx_rms_cl = rms(detrend(data_tomo_1rpm_m3.Rx_int(i_m3+50000:end), 0));
data_tomo_1rpm_m3.Ry_rms_cl = rms(detrend(data_tomo_1rpm_m3.Ry_int(i_m3+50000:end), 0));
data_tomo_1rpm_m3.Dx_rms_ol = rms(detrend(data_tomo_1rpm_m3.Dx_int(1:i_m3), 0));
data_tomo_1rpm_m3.Dy_rms_ol = rms(detrend(data_tomo_1rpm_m3.Dy_int(1:i_m3), 0));
data_tomo_1rpm_m3.Dz_rms_ol = rms(detrend(data_tomo_1rpm_m3.Dz_int(1:i_m3), 0));
data_tomo_1rpm_m3.Rx_rms_ol = rms(detrend(data_tomo_1rpm_m3.Rx_int(1:i_m3), 0));
data_tomo_1rpm_m3.Ry_rms_ol = rms(detrend(data_tomo_1rpm_m3.Ry_int(1:i_m3), 0));| $D_x$ [$\mu m$] | $D_y$ [$\mu m$] | $D_z$ [$nm$] | $R_x$ [$\mu\text{rad}$] | $R_y$ [$\mu\text{rad}$] | |
|---|---|---|---|---|---|
| $m_0$ | 6 | 6 | 32 | 34 | 34 |
| $m_1$ | 6 | 7 | 26 | 51 | 55 |
| $m_2$ | 36 | 38 | 36 | 259 | 253 |
| $m_3$ | 31 | 33 | 38 | 214 | 203 |
| $D_x$ [nm] | $D_y$ [nm] | $D_z$ [nm] | $R_x$ [nrad] | $R_y$ [nrad] | |
|---|---|---|---|---|---|
| $m_0$ | 13 | 15 | 5 | 57 | 55 |
| $m_1$ | 16 | 25 | 6 | 102 | 55 |
| $m_2$ | 25 | 25 | 7 | 120 | 103 |
| $m_3$ | 40 | 53 | 9 | 225 | 169 |
Robust Control - 6rpm
data_tomo_6rpm_m0 = load(sprintf("%s/scans/2023-08-11_11-31_tomography_6rpm_m0.mat", mat_dir));
data_tomo_6rpm_m0.time = Ts*[0:length(data_tomo_6rpm_m0.Rz)-1];data_tomo_6rpm_m1 = load(sprintf("%s/scans/2023-08-11_11-23_tomography_6rpm_m1.mat", mat_dir));
data_tomo_6rpm_m1.time = Ts*[0:length(data_tomo_6rpm_m1.Rz)-1];%% Compute RMS values while in closed-loop
[~, i_m0] = find(data_tomo_6rpm_m0.hac_status == 1);
data_tomo_6rpm_m0.Dx_rms_cl = rms(detrend(data_tomo_6rpm_m0.Dx_int(i_m0+50000:end), 0));
data_tomo_6rpm_m0.Dy_rms_cl = rms(detrend(data_tomo_6rpm_m0.Dy_int(i_m0+50000:end), 0));
data_tomo_6rpm_m0.Dz_rms_cl = rms(detrend(data_tomo_6rpm_m0.Dz_int(i_m0+50000:end), 0));
data_tomo_6rpm_m0.Rx_rms_cl = rms(detrend(data_tomo_6rpm_m0.Rx_int(i_m0+50000:end), 0));
data_tomo_6rpm_m0.Ry_rms_cl = rms(detrend(data_tomo_6rpm_m0.Ry_int(i_m0+50000:end), 0));
data_tomo_6rpm_m0.Dx_rms_ol = rms(detrend(data_tomo_6rpm_m0.Dx_int(1:i_m0), 0));
data_tomo_6rpm_m0.Dy_rms_ol = rms(detrend(data_tomo_6rpm_m0.Dy_int(1:i_m0), 0));
data_tomo_6rpm_m0.Dz_rms_ol = rms(detrend(data_tomo_6rpm_m0.Dz_int(1:i_m0), 0));
data_tomo_6rpm_m0.Rx_rms_ol = rms(detrend(data_tomo_6rpm_m0.Rx_int(1:i_m0), 0));
data_tomo_6rpm_m0.Ry_rms_ol = rms(detrend(data_tomo_6rpm_m0.Ry_int(1:i_m0), 0));
%% Compute RMS values while in closed-loop
[~, i_m1] = find(data_tomo_6rpm_m1.hac_status == 1);
data_tomo_6rpm_m1.Dx_rms_cl = rms(detrend(data_tomo_6rpm_m1.Dx_int(i_m1+50000:end), 0));
data_tomo_6rpm_m1.Dy_rms_cl = rms(detrend(data_tomo_6rpm_m1.Dy_int(i_m1+50000:end), 0));
data_tomo_6rpm_m1.Dz_rms_cl = rms(detrend(data_tomo_6rpm_m1.Dz_int(i_m1+50000:end), 0));
data_tomo_6rpm_m1.Rx_rms_cl = rms(detrend(data_tomo_6rpm_m1.Rx_int(i_m1+50000:end), 0));
data_tomo_6rpm_m1.Ry_rms_cl = rms(detrend(data_tomo_6rpm_m1.Ry_int(i_m1+50000:end), 0));
data_tomo_6rpm_m1.Dx_rms_ol = rms(detrend(data_tomo_6rpm_m1.Dx_int(1:i_m1), 0));
data_tomo_6rpm_m1.Dy_rms_ol = rms(detrend(data_tomo_6rpm_m1.Dy_int(1:i_m1), 0));
data_tomo_6rpm_m1.Dz_rms_ol = rms(detrend(data_tomo_6rpm_m1.Dz_int(1:i_m1), 0));
data_tomo_6rpm_m1.Rx_rms_ol = rms(detrend(data_tomo_6rpm_m1.Rx_int(1:i_m1), 0));
data_tomo_6rpm_m1.Ry_rms_ol = rms(detrend(data_tomo_6rpm_m1.Ry_int(1:i_m1), 0));| $D_x$ [$\mu m$] | $D_y$ [$\mu m$] | $D_z$ [$nm$] | $R_x$ [$\mu\text{rad}$] | $R_y$ [$\mu\text{rad}$] | |
|---|---|---|---|---|---|
| $m_0$ | 8 | 7 | 20 | 41 | 41 |
| $m_1$ | 4 | 4 | 21 | 39 | 39 |
| $D_x$ [nm] | $D_y$ [nm] | $D_z$ [nm] | $R_x$ [nrad] | $R_y$ [nrad] | |
|---|---|---|---|---|---|
| $m_0$ | 17 | 19 | 5 | 70 | 73 |
| $m_1$ | 20 | 26 | 7 | 110 | 77 |
Robust Control - 30rpm
%% Load Data
data_tomo_30rpm_m0 = load(sprintf("%s/scans/2023-08-17_15-26_tomography_30rpm_m0_robust.mat", mat_dir));
data_tomo_30rpm_m0.time = Ts*[0:length(data_tomo_30rpm_m0.Rz)-1];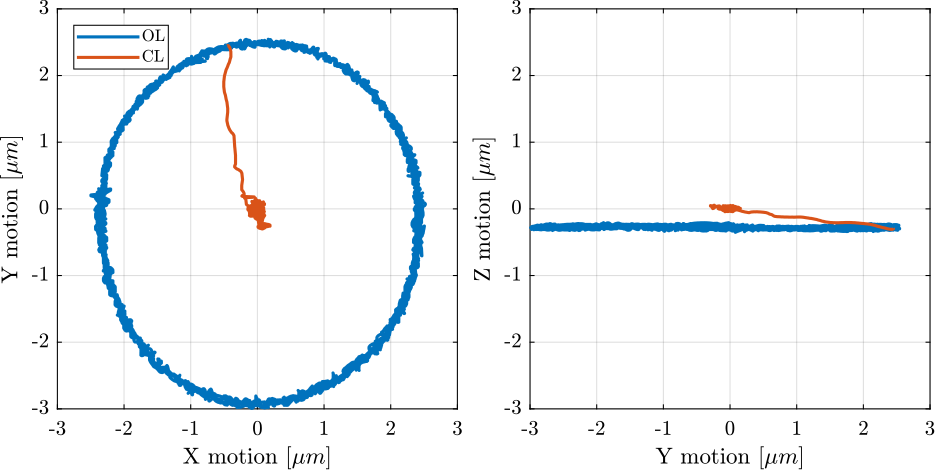
%% Compute RMS values while in closed-loop
[~, i_m0] = find(data_tomo_30rpm_m0.hac_status == 1);
data_tomo_30rpm_m0.Dx_rms_cl = rms(detrend(data_tomo_30rpm_m0.Dx_int(i_m0+50000:end), 0));
data_tomo_30rpm_m0.Dy_rms_cl = rms(detrend(data_tomo_30rpm_m0.Dy_int(i_m0+50000:end), 0));
data_tomo_30rpm_m0.Dz_rms_cl = rms(detrend(data_tomo_30rpm_m0.Dz_int(i_m0+50000:end), 0));
data_tomo_30rpm_m0.Rx_rms_cl = rms(detrend(data_tomo_30rpm_m0.Rx_int(i_m0+50000:end), 0));
data_tomo_30rpm_m0.Ry_rms_cl = rms(detrend(data_tomo_30rpm_m0.Ry_int(i_m0+50000:end), 0));
data_tomo_30rpm_m0.Dx_rms_ol = rms(detrend(data_tomo_30rpm_m0.Dx_int(1:i_m0), 0));
data_tomo_30rpm_m0.Dy_rms_ol = rms(detrend(data_tomo_30rpm_m0.Dy_int(1:i_m0), 0));
data_tomo_30rpm_m0.Dz_rms_ol = rms(detrend(data_tomo_30rpm_m0.Dz_int(1:i_m0), 0));
data_tomo_30rpm_m0.Rx_rms_ol = rms(detrend(data_tomo_30rpm_m0.Rx_int(1:i_m0), 0));
data_tomo_30rpm_m0.Ry_rms_ol = rms(detrend(data_tomo_30rpm_m0.Ry_int(1:i_m0), 0));| $D_x$ [$\mu m$] | $D_y$ [$\mu m$] | $D_z$ [$nm$] | $R_x$ [$\mu\text{rad}$] | $R_y$ [$\mu\text{rad}$] | |
|---|---|---|---|---|---|
| $m_0$ | 2 | 2 | 24 | 10 | 10 |
| $D_x$ [nm] | $D_y$ [nm] | $D_z$ [nm] | $R_x$ [nrad] | $R_y$ [nrad] | |
|---|---|---|---|---|---|
| $m_0$ | 34 | 38 | 10 | 127 | 129 |
$D_z$ scans: Dirty Layer Scans
<<sec:id31_scans_dz>>
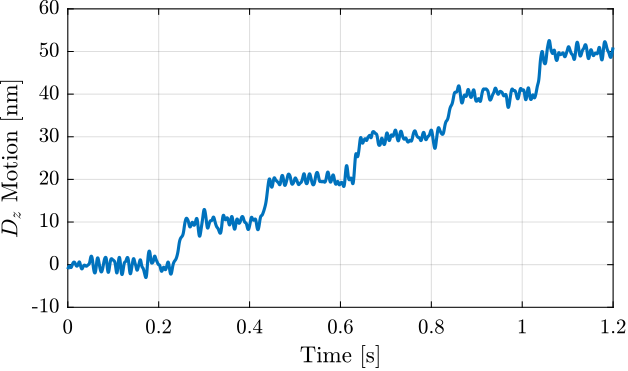
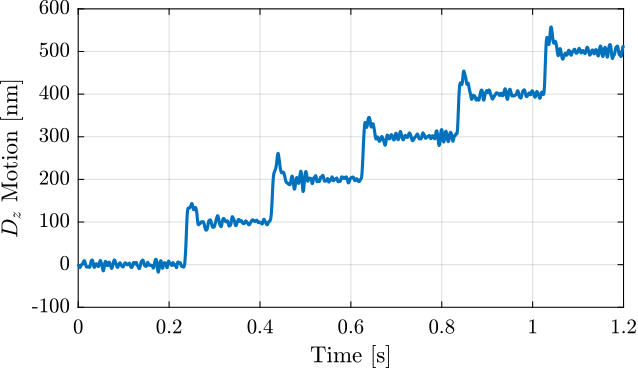
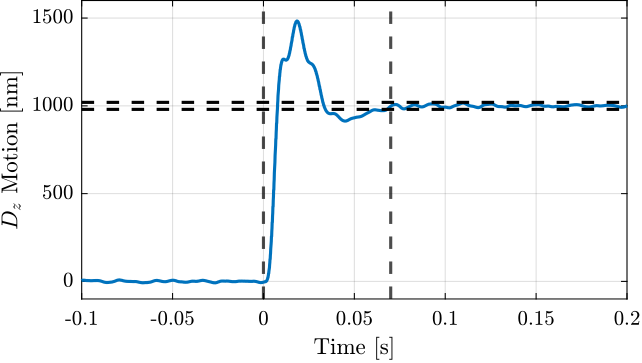
Step by Step $D_z$ motion
%% Load Dz MIM data
data_dz_steps_3nm = load(sprintf("%s/scans/2023-08-18_14-57_dz_mim_3_nm.mat", mat_dir));
data_dz_steps_3nm.time = Ts*[0:length(data_dz_steps_3nm.Dz_int)-1];
data_dz_steps_10nm = load(sprintf("%s/scans/2023-08-18_14-57_dz_mim_10_nm.mat", mat_dir));
data_dz_steps_10nm.time = Ts*[0:length(data_dz_steps_10nm.Dz_int)-1];
data_dz_steps_100nm = load(sprintf("%s/scans/2023-08-18_14-57_dz_mim_100_nm.mat", mat_dir));
data_dz_steps_100nm.time = Ts*[0:length(data_dz_steps_100nm.Dz_int)-1];
data_dz_steps_1000nm = load(sprintf("%s/scans/2023-08-18_14-57_dz_mim_1000_nm.mat", mat_dir));
data_dz_steps_1000nm.time = Ts*[0:length(data_dz_steps_1000nm.Dz_int)-1];Three step sizes are tested:
- $10\,nm$ steps (Figure ref:fig:id31_dz_mim_10nm_steps)
- $100\,nm$ steps (Figure ref:fig:id31_dz_mim_100nm_steps)
- $1\,\mu m$ steps (Figure ref:fig:id31_dz_steps_response)
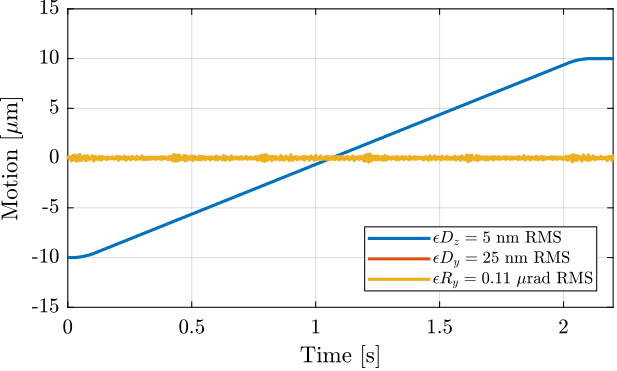
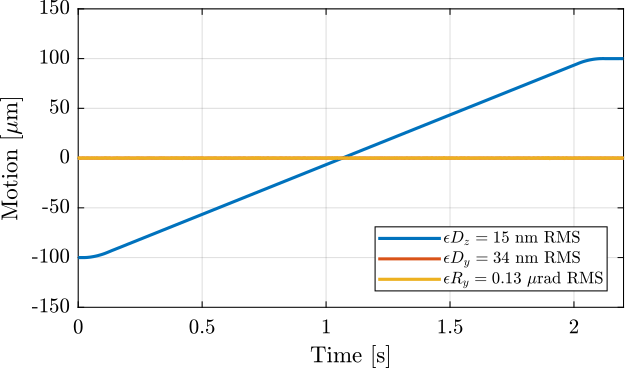
Continuous $D_z$ motion: Dirty Layer Scans
data_dz_10ums = load(sprintf("%s/scans/2023-08-18_15-33_dirty_layer_m0_small.mat", mat_dir));
data_dz_10ums.time = Ts*[0:length(data_dz_10ums.Dz_int)-1];data_dz_100ums = load(sprintf("%s/scans/2023-08-18_15-32_dirty_layer_m0.mat", mat_dir));
data_dz_100ums.time = Ts*[0:length(data_dz_100ums.Dz_int)-1];Two $D_z$ scans are performed:
- at $10\,\mu m/s$ in Figure ref:fig:id31_dirty_layer_scan_m0
- at $100\,\mu m/s$ in Figure ref:fig:id31_dirty_layer_scan_m0_large
%% Not so good results with the CF controller
data_cf = load(sprintf("%s/scans/2023-08-21_19-20_dirty_layer_m1_cf.mat", mat_dir));
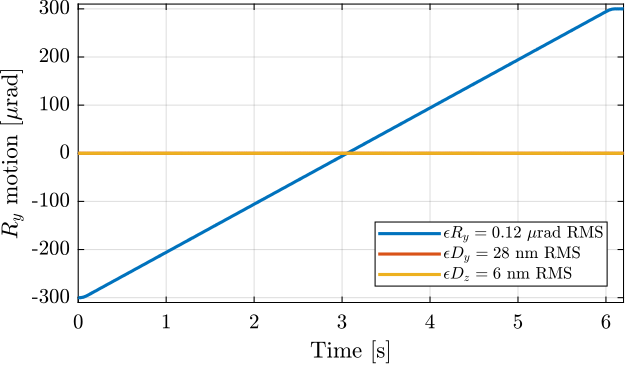
data_cf.time = Ts*[0:length(data_cf.Dz_int)-1];$R_y$ scans: Reflectivity
<<sec:id31_scans_reflectivity>>
%% Load data for the reflectivity scan
data_ry = load(sprintf("%s/scans/2023-08-18_15-24_first_reflectivity_m0.mat", mat_dir));
data_ry.time = Ts*[0:length(data_ry.Ry_int)-1];An $R_y$ scan is performed at $100\,\mu rad/s$ velocity (Figure ref:fig:id31_reflectivity_scan_Ry_100urads). During the $R_y$ scan, the errors in $D_y$ are $D_z$ are kept small.
$D_y$ Scans
<<sec:id31_scans_dy>>
Introduction ignore
The steps generated by the IcePAP for the $T_y$ stage are send to the Speedgoat. Then, we can know in real time what is the wanted position in $D_y$ during $T_y$ scans.
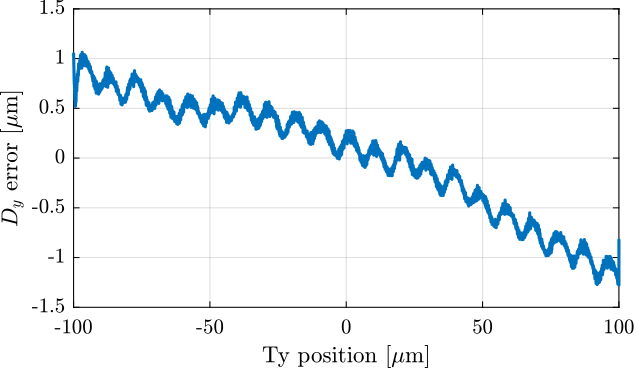
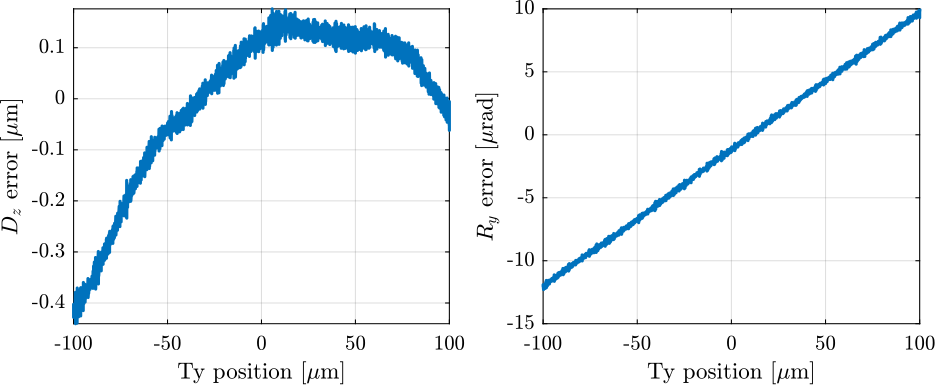
Open Loop
%% Slow Ty scan (10um/s)
data_ty_ol_slow = load(sprintf("%s/scans/2023-08-21_20-05_ty_scan_m1_open_loop_slow.mat", mat_dir));
data_ty_ol_slow.time = Ts*[0:length(data_ty_ol_slow.Dy_int)-1];We can clearly see micro-stepping errors of the stepper motor used for the $T_y$ stage. The errors have a period of $10\,\mu m$ with an amplitude of $\pm 100\,nm$.
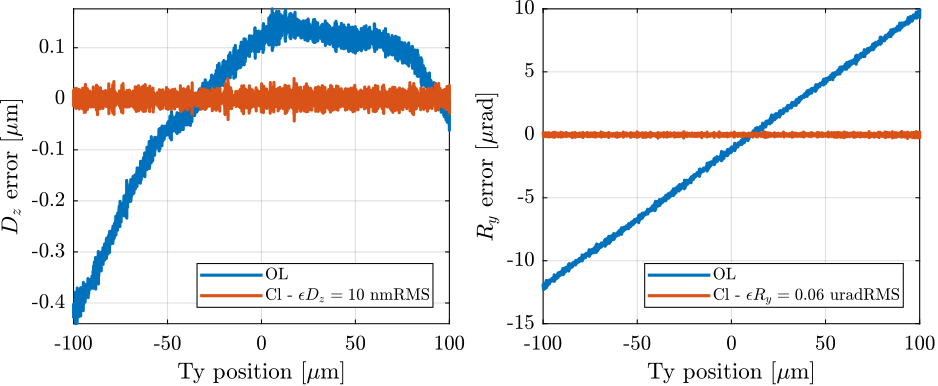
Closed Loop
%% Slow Ty scan (10um/s) - CL
data_ty_cl_slow = load(sprintf("%s/scans/2023-08-21_20-07_ty_scan_m1_cf_closed_loop_slow.mat", mat_dir));
data_ty_cl_slow.time = Ts*[0:length(data_ty_cl_slow.Dy_int)-1];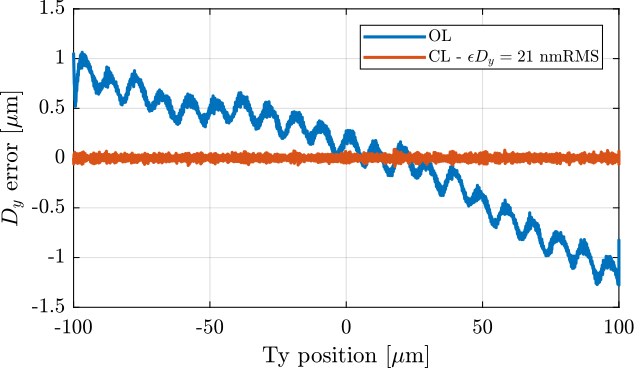
Faster Scan
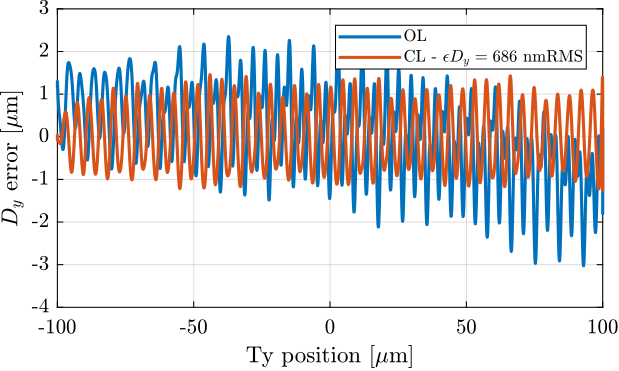
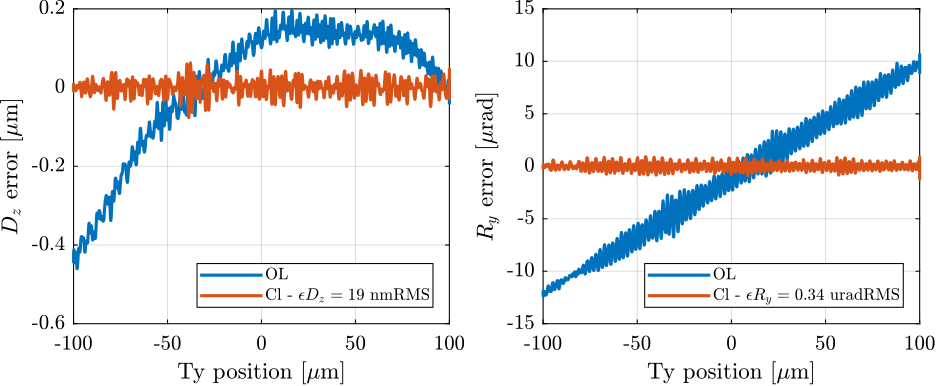
%% Fast Ty scan (100um/s) - OL
data_ty_ol_fast = load(sprintf("%s/scans/2023-08-21_20-05_ty_scan_m1_open_loop.mat", mat_dir));
data_ty_ol_fast.time = Ts*[0:length(data_ty_ol_fast.Dy_int)-1];%% Fast Ty scan (10um/s) - CL
data_ty_cl_fast = load(sprintf("%s/scans/2023-08-21_20-07_ty_scan_m1_cf_closed_loop.mat", mat_dir));
data_ty_cl_fast.time = Ts*[0:length(data_ty_cl_fast.Dy_int)-1];Because of micro-stepping errors of the Ty stepper motor, when scanning at high velocity this induce high frequency vibration that are outside the bandwidth of the feedback controller.
At $100\,\mu m/s$, the micro-stepping errors with a period of $10\,\mu m$ (see Figure ref:fig:id31_ty_scan_10ums_ol_dy_errors) are at 10Hz. These errors are them amplified by some resonances in the system.
This could be easily solved by changing the stepper motor for a torque motor for instance.
Combined $R_z$ and $D_y$: Diffraction Tomography
<<sec:id31_scans_diffraction_tomo>> Instead of doing a fast $R_z$ motion a slow $D_y$, the idea is to perform slow $R_z$ (here 1rpm) and fast $D_y$ scans with the nano-hexapod.
%% 100um/s - Robust controller
data_dt_100ums = load(sprintf("%s/scans/2023-08-18_17-12_diffraction_tomo_m0.mat", mat_dir));
data_dt_100ums.time = Ts*[0:length(data_dt_100ums.Dy_int)-1];
%% 500um/s - Robust controller (Not used)
% data_dt_500ums = load(sprintf("%s/scans/2023-08-18_17-19_diffraction_tomo_m0_fast.mat", mat_dir));
% data_dt_500ums.time = Ts*[0:length(data_dt_500ums.Dy_int)-1];
%% 500um/s - Complementary filters
data_dt_500ums = load(sprintf("%s/scans/2023-08-21_15-15_diffraction_tomo_m0_fast_cf.mat", mat_dir));
data_dt_500ums.time = Ts*[0:length(data_dt_500ums.Dy_int)-1];
%% 1mm/s - Complementary filters
data_dt_1000ums = load(sprintf("%s/scans/2023-08-21_15-16_diffraction_tomo_m0_fast_cf.mat", mat_dir));
data_dt_1000ums.time = Ts*[0:length(data_dt_1000ums.Dy_int)-1];
%% 5mm/s - Complementary filters
% data_dt_5000ums = load(sprintf("%s/scans/2023-08-21_18-03_diffraction_tomo_m2_fast_cf.mat", mat_dir));
% data_dt_5000ums.time = Ts*[0:length(data_dt_5000ums.Dy_int)-1];
%% 10mm/s - Complementary filters
data_dt_10000ums = load(sprintf("%s/scans/2023-08-21_15-17_diffraction_tomo_m0_fast_cf.mat", mat_dir));
data_dt_10000ums.time = Ts*[0:length(data_dt_10000ums.Dy_int)-1];Here, the $D_y$ scans are performed only with the nano-hexapod (the Ty stage is not moving), so we are limited to $\pm 100\,\mu m$.
Several $D_y$ velocities are tested: $0.1\,mm/s$, $0.5\,mm/s$, $1\,mm/s$ and $10\,mm/s$ (see Figure ref:fig:id31_diffraction_tomo_velocities).
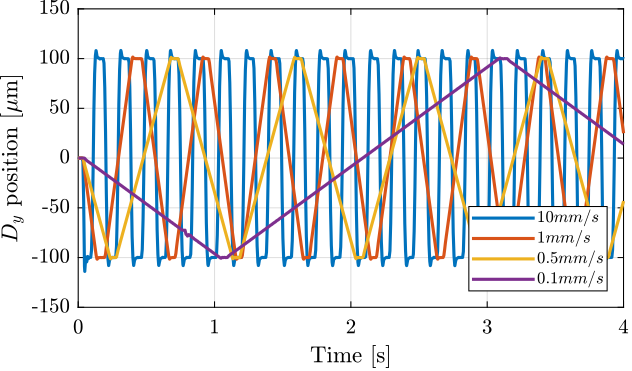
The corresponding "repetition rate" and $D_y$ scan per spindle turn are shown in Table ref:tab:diffraction_tomo_velocities.
The main issue here is the "waiting" time between two scans that is in the order of 50ms. By removing this waiting time (fairly easily), we can double the repetition rate at 10mm/s.
| $D_y$ Velocity | Repetition rate | Scans per turn (at 1RPM) |
|---|---|---|
| 0.1 mm/s | 4 s | 15 |
| 0.5 mm/s | 0.9 s | 65 |
| 1 mm/s | 0.5 s | 120 |
| 10 mm/s | 0.18 s | 330 |
The scan results for a velocity of 1mm/s is shown in Figure ref:fig:id31_diffraction_tomo_1mms. The $D_z$ and $R_y$ errors are quite small during the scan.
The $D_y$ errors are quite large as the velocity is increased. This type of scan can probably be massively improved by using feed-forward and optimizing the trajectory. Also, if the detectors are triggered in position (the Speedgoat could generate an encoder signal for instance), we don't care about the $D_y$ errors.
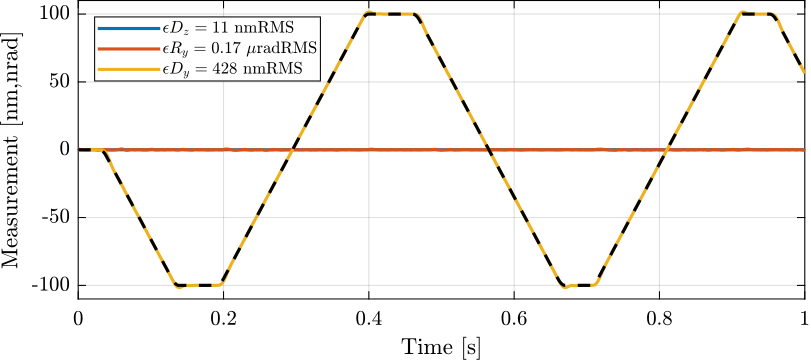
| Velocity | $D_y$ [nmRMS] | $D_z$ [nmRMS] | $R_y$ [$\mu\text{radRMS}$] |
|---|---|---|---|
| 0.1 mm/s | 75.5 | 9.1 | 0.1 |
| 0.5 mm/s | 190.5 | 10.0 | 0.1 |
| 1 mm/s | 428.0 | 11.2 | 0.2 |
| 10 mm/s | 4639.9 | 55.9 | 1.4 |
Summary of experiments
For each conducted experiments, the $D_y$, $D_z$ and $R_y$ errors are computed and summarized in Table ref:tab:id31_experiments_results_summary.
%% Summary of results
data_results = [...
1e9*data_tomo_1rpm_m0.Dy_rms_cl, 1e9*data_tomo_1rpm_m0.Dz_rms_cl, 1e9*data_tomo_1rpm_m0.Ry_rms_cl ; ... % Tomo 1rpm
1e9*data_tomo_6rpm_m0.Dy_rms_cl, 1e9*data_tomo_6rpm_m0.Dz_rms_cl, 1e9*data_tomo_6rpm_m0.Ry_rms_cl ; ... % Tomo 6rpm
1e9*data_tomo_30rpm_m0.Dy_rms_cl, 1e9*data_tomo_30rpm_m0.Dz_rms_cl, 1e9*data_tomo_30rpm_m0.Ry_rms_cl ; ... % Tomo 30rpm
1e9*rms(detrend(data_dz_10ums.e_dy, 0)), 1e9*rms(detrend(data_dz_10ums.e_dz, 0)), 1e9*rms(detrend(data_dz_10ums.e_ry, 0)) ; ... % Dz 10um/s
1e9*rms(detrend(data_dz_100ums.e_dy,0)), 1e9*rms(detrend(data_dz_100ums.e_dz,0)), 1e9*rms(detrend(data_dz_100ums.e_ry,0)) ; ... % Dz 100um/s
1e9*rms(detrend(data_ry.e_dy,0)), 1e9*rms(detrend(data_ry.e_dz,0)), 1e9*rms(detrend(data_ry.e_ry,0)) ; ... % Ry 100urad/s
1e9*rms(detrend(data_ty_cl_slow.e_dy, 0)), 1e9*rms(detrend(data_ty_cl_slow.e_dz, 0)), 1e9*rms(detrend(data_ty_cl_slow.e_rz, 0)) ; ... % Dy 10 um/s
1e9*rms(detrend(data_dt_100ums.Dy_int-data_dt_100ums.m_hexa_dy, 0)), 1e9*rms(detrend(data_dt_100ums.Dz_int, 0)), 1e9*rms(detrend(data_dt_100ums.Ry_int, 0)); ... % Diffraction tomo 0.1mm/s
1e9*rms(detrend(data_dt_1000ums.Dy_int-data_dt_1000ums.m_hexa_dy,0)), 1e9*rms(detrend(data_dt_1000ums.Dz_int,0)), 1e9*rms(detrend(data_dt_1000ums.Ry_int,0)) ... % Diffraction tomo 1mm/s
];| $D_y$ [nmRMS] | $D_z$ [nmRMS] | $R_y$ [nradRMS] | |
|---|---|---|---|
| Tomography ($R_z$ 1rpm) | 15 | 5 | 55 |
| Tomography ($R_z$ 6rpm) | 19 | 5 | 73 |
| Tomography ($R_z$ 30rpm) | 38 | 10 | 129 |
| Dirty Layer ($D_z$ $10\,\mu m/s$) | 25 | 5 | 114 |
| Dirty Layer ($D_z$ $100\,\mu m/s$) | 34 | 15 | 130 |
| Reflectivity ($R_y$ $100\,\mu\text{rad}/s$) | 28 | 6 | 118 |
| Lateral Scan ($D_y$ $10\,\mu m/s$) | 21 | 10 | 37 |
| Diffraction Tomography ($R_z$ 1rpm, $D_y$ 0.1mm/s) | 75 | 9 | 118 |
| Diffraction Tomography ($R_z$ 1rpm, $D_y$ 1mm/s) | 428 | 11 | 169 |