72 KiB
Micro-Station - Modal Analysis
- Introduction
- Measurement Setup
- Frequency Analysis
- Modal Analysis
- Conclusion
- Bibliography
- Footnotes
This report is also available as a pdf.
Introduction ignore
In order to further improve the accuracy of the performance predictions, a model that better represents the micro-station dynamics is required. A multi-body model, consisting of several rigid bodies connected by kinematic constraints (i.e. joints) and springs and damper elements, is a good candidate to model the micro-station.
Even though the inertia of each solid body can easily be estimated from its geometry and its material density, it is more difficult to properly estimate the stiffness and damping properties of the guiding elements connecting each solid body. The experimental modal analysis will be useful to verify that a multi-body model can represent accurately the dynamics of the micro-station and to help tuning the model.
The approach of tuning the multi-body model from measurements is illustrated in Figure ref:fig:modal_vibration_analysis_procedure. First, a response model is obtained, which corresponds to a set of frequency response functions computed from experimental measurements. From this response model, and modal model can be computed, which consists of two matrices: one containing the natural frequencies and damping factors of the considered modes, and another one describing the mode shapes. This modal model can then be used to tune the spatial model (i.e. the multi-body model), that is to say to tune the mass spring and damping properties of the considered solid bodies.
\begin{tikzpicture}
\node[block, inner sep = 8pt, align=center] (1) {Description\\of structure};
\node[block, inner sep = 8pt, align=center, left=1.0 of 1] (2) {Vibration\\Modes};
\node[block, inner sep = 8pt, align=center, left=1.0 of 2] (3) {Response\\Levels};
\draw[<->] (1) -- (2);
\draw[<->] (2) -- (3);
\node[above] (labelt) at (1.north) {Spatial Model};
\node[] at (2|-labelt) {Modal Model};
\node[] at (3|-labelt) {Response Model};
\node[align = center, font=\tiny, below] (labelb) at (1.south) {Mass\\Stiffness\\Damping};
\node[align = center, font=\tiny] at (2|-labelb) {Natural Frequencies\\Mode Shapes\\};
\node[align = center, font=\tiny] at (3|-labelb) {Time Responses\\Frequency Responses\\};
\end{tikzpicture}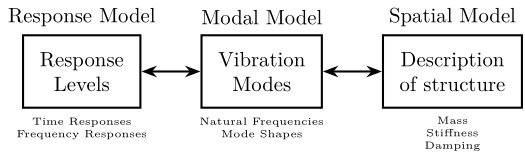
The measurement setup used to obtain the response model is presented in Section ref:sec:modal_meas_setup. This includes the instrumentation used (i.e. instrumented hammer, accelerometers and acquisition system), the test planing, and a first analysis of the obtained signals.
In Section ref:sec:modal_frf_processing, the obtained frequency response functions between the forces applied using the instrumented hammer and the various accelerometers fixed to the structure are computed. These measurements are projected at the center of mass of each considered solid body to ease the further use of the results. The solid body assumption is then verified, validating the use of the multi-body model.
Finally, the modal analysis is performed in Section ref:sec:modal_analysis. It shows how complex the micro-station dynamics is, and the necessity of the developed more complex multi-body model.
Measurement Setup
<<sec:modal_meas_setup>>
Introduction ignore
In order to perform an experimental modal analysis, a proper measurement setup is key. This include using appropriate instrumentation (presented in Section ref:ssec:modal_instrumentation) and properly preparing the structure to be measured (Section ref:ssec:modal_test_preparation). Then, the location of the measured motion (Section ref:ssec:modal_accelerometers) and the location of the hammer impacts (Section ref:ssec:modal_hammer_impacts) have to be chosen carefully. Obtained force and acceleration signals are shown in Section ref:ssec:modal_measured_signals, and the quality of the measured data is verified.
Used Instrumentation
<<ssec:modal_instrumentation>>
Three equipment are key to perform a good modal analysis. First, accelerometers are used to measure the response of the structure. Here, 3-axis accelerometers1 shown in figure ref:fig:modal_accelero_M393B05 are used. These accelerometers are glued to the micro-station using a thin layer of wax for best results cite:&ewins00_modal chapt. 3.5.7.



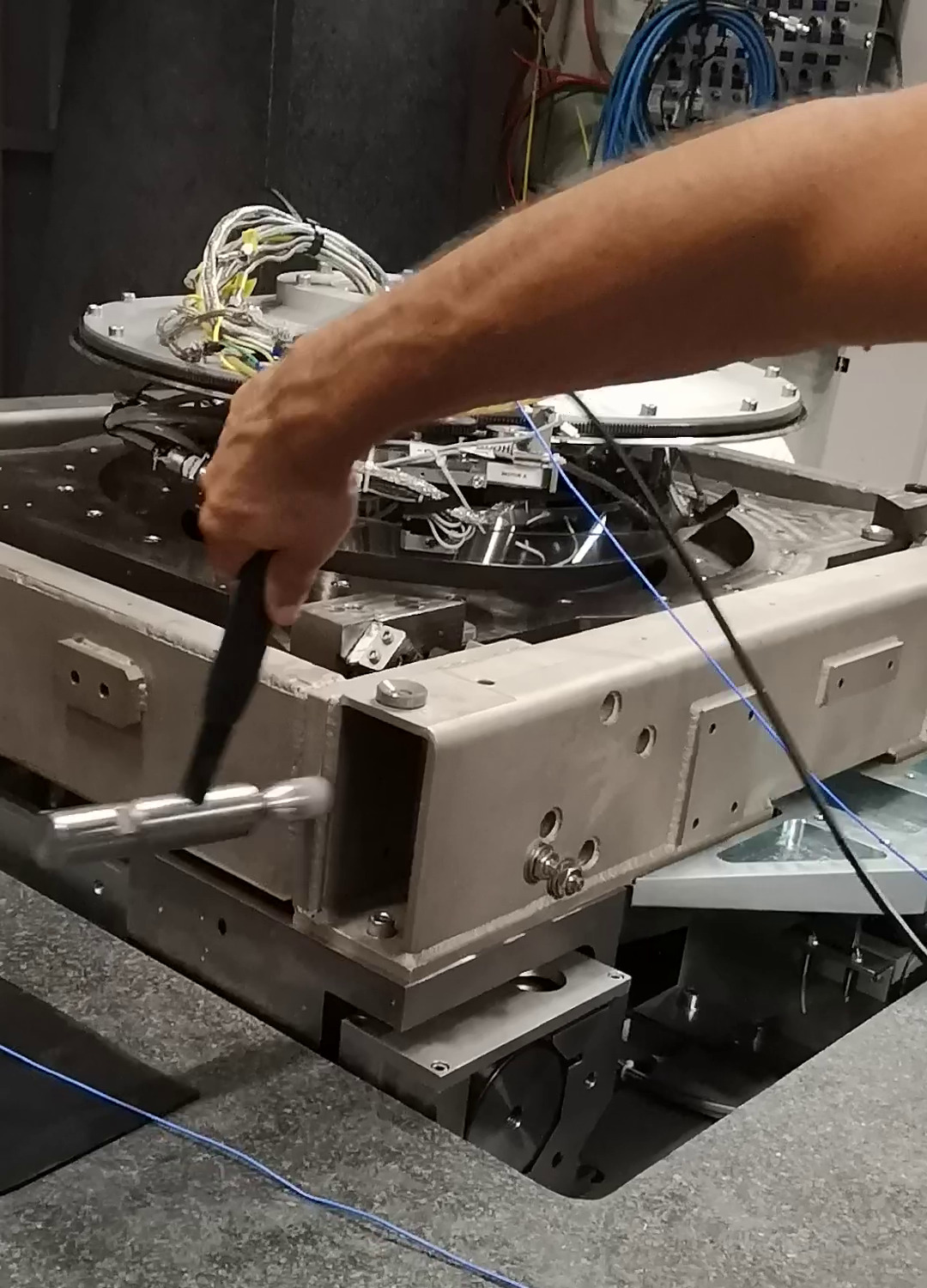
Then, an instrumented hammer2 (figure ref:fig:modal_instrumented_hammer) is used to apply forces to the structure in a controlled way. Tests have been conducted to determine the most suitable hammer tip (ranging from a metallic one to a soft plastic one). The softer tip has been found to give best results as it injects more energy in the low frequency range where the coherence was low, such that the overall coherence was improved.
Finally, an acquisition system3 (figure ref:fig:modal_oros) is used to acquire the injected force and the response accelerations in a synchronized way and with sufficiently low noise.
Structure Preparation and Test Planing
<<ssec:modal_test_preparation>>
In order to obtain meaningful results, the modal analysis of the micro-station in performed in-situ. To do so, all the micro-station stages controllers are turned "ON". This is especially important for stages for which the stiffness is provided by local feedback control, which is case for the air bearing spindle, and the translation stage. If these local feedback control were turned OFF, this would have resulted in very low frequency modes difficult to measure in practice, and this would also have lead to decoupled dynamics which would not be the case in practice.
The top part representing the active stabilization stage has been disassembled in order to reduce the complexity of the dynamics and also because the active stabilization stage and the sample will be added in the multi-body model afterwards.
To perform the modal-analysis from the measured responses, the $n \times n$ frequency response function matrix $\mathbf{H}$ needs to be measured, where $n$ is the considered number of degrees of freedom. The $H_{jk}$ element of this FRF matrix corresponds to the frequency response function from a force $F_k$ applied at DoF $k$ to the displacement of the structure $X_j$ at DoF $j$.
Measuring this FRF matrix is very time consuming as it requires to make $n^2$ measurements. However thanks to the principle of reciprocity ($H_{jk} = H_{kj}$) and using the point measurement ($H_{jj}$), it is possible to reconstruct the full matrix by measuring only one column or one line of the matrix $\mathbf{H}$ cite:&ewins00_modal chapt. 5.2. Therefore, a minimum set of $n$ frequency response functions needs to be measured. This can be done either by measuring the response $X_{j}$ at a fixed DoF $j$ while applying forces $F_{i}$ for at all $n$ considered DoF, or by applying a force $F_{k}$ at a fixed DoF $k$ and measuring the response $X_{i}$ for all $n$ DoF.
It is however not advised to measure only one row or one column as one or more modes may be missed by an unfortunate choice of force or acceleration measured locations. In this modal-analysis, it is chosen to measure the response of the structure at all considered DoF, and to excite the structure at one location in three directions in order to have some redundancy and to make sure that all modes are properly excited.
Location of the Accelerometers
<<ssec:modal_accelerometers>>
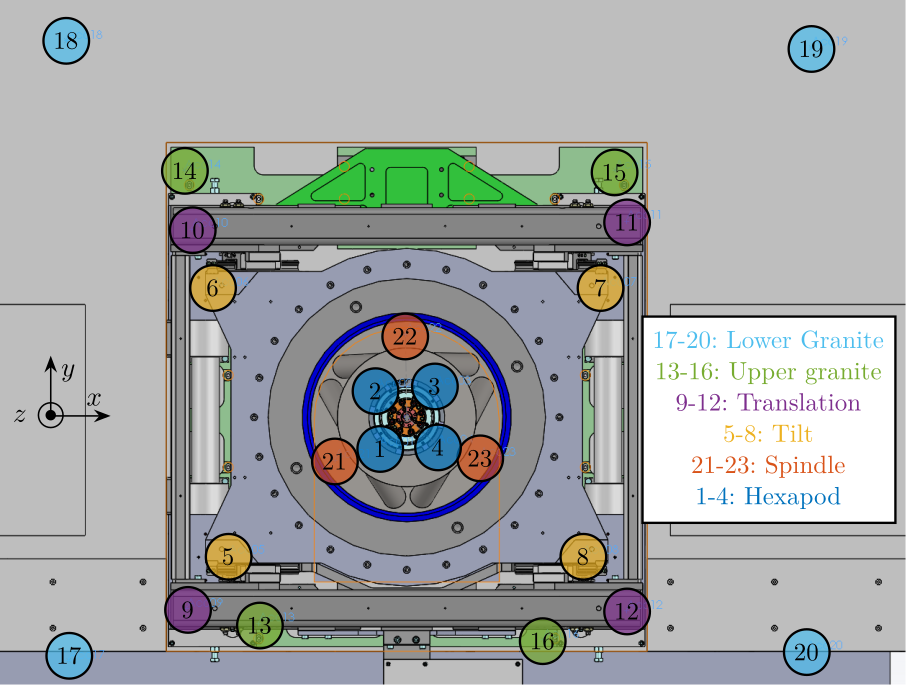
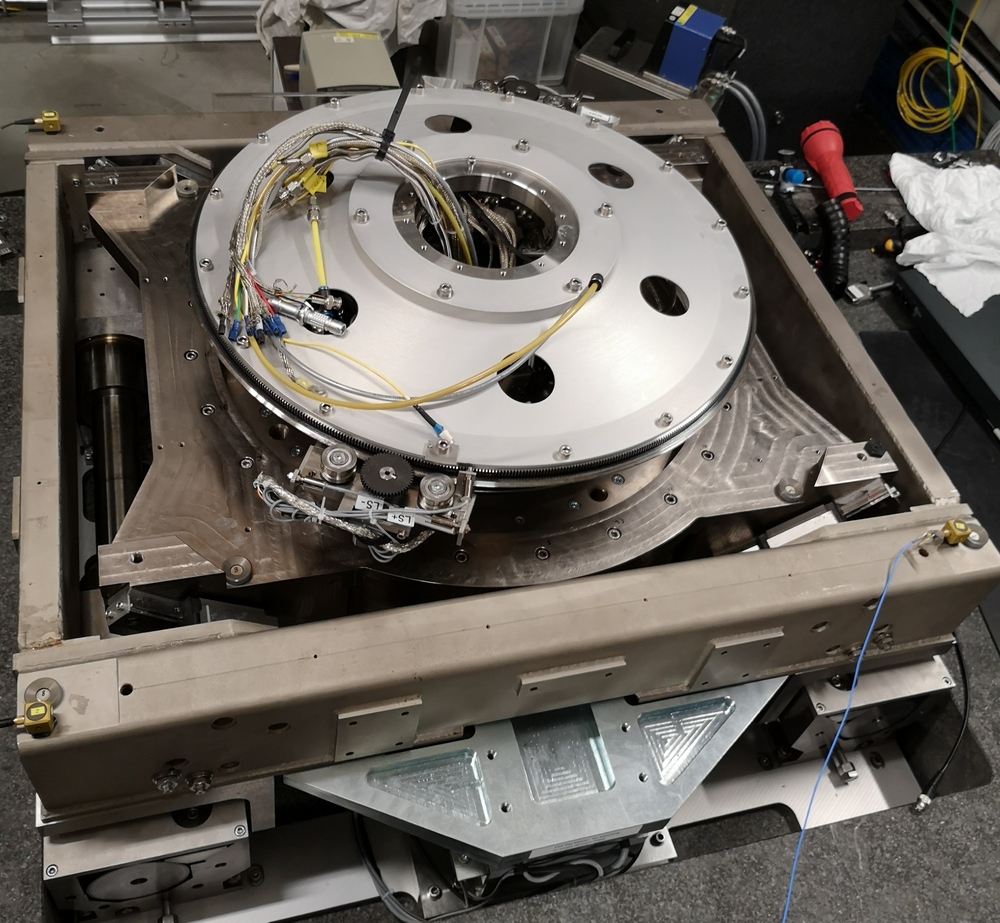
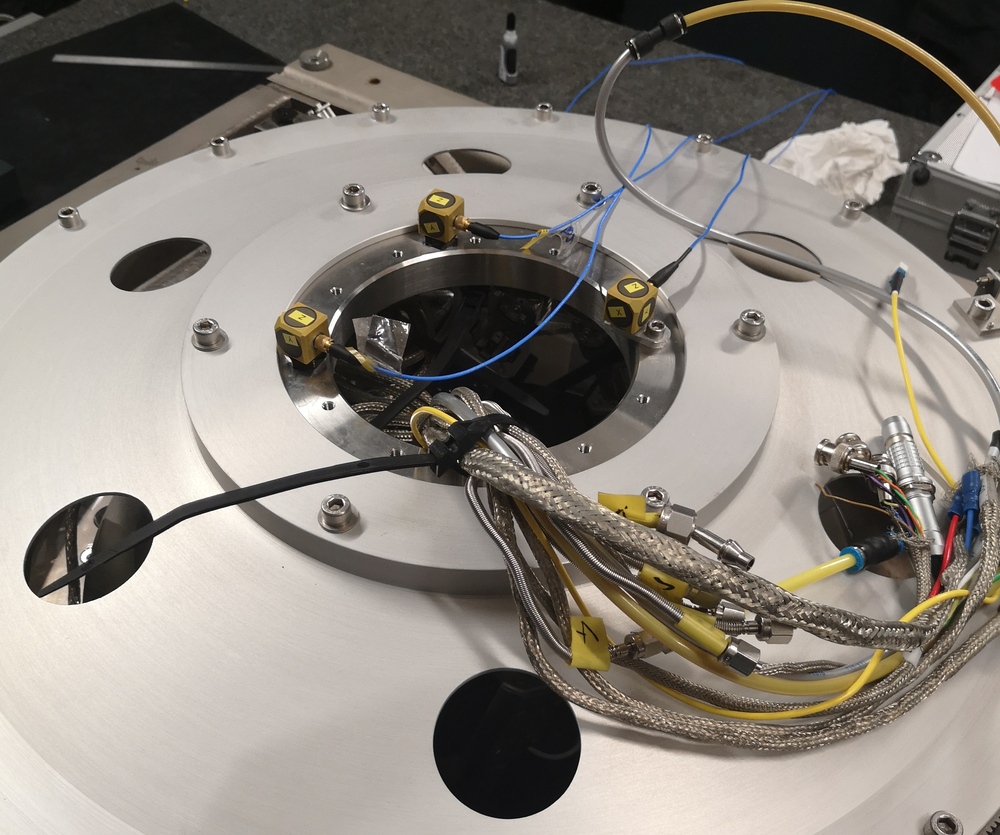
The location of the accelerometers fixed to the micro-station is essential as it defines where the dynamics is identified. A total of 23 accelerometers are fixed to the six key stages of the micro station: the lower and upper granites, the translation stage, the tilt stage, the spindle and the micro hexapod. The position of the accelerometers are visually shown on a CAD model in Figure ref:fig:modal_location_accelerometers and their precise locations with respect to a frame located at the point of interest are summarized in Table ref:tab:modal_position_accelerometers. Pictures of the accelerometers fixed to the translation stage and to the micro-hexapod are shown in Figure ref:fig:modal_accelerometer_pictures.
As all key stages of the micro-station are foreseen to behave as solid bodies, only 6 DoF can be considered per solid body. However, it was chosen to use four 3-axis accelerometers (i.e. 12 measured DoF) for each considered solid body to have some redundancy and to be able to verify the solid body assumption (see Section ref:ssec:modal_solid_body_assumption).
\hfill
| $x$ | $y$ | $z$ | |
|---|---|---|---|
| Low. Granite | -730 | -526 | -951 |
| Low. Granite | -735 | 814 | -951 |
| Low. Granite | 875 | 799 | -951 |
| Low. Granite | 865 | -506 | -951 |
| Up. Granite | -320 | -446 | -786 |
| Up. Granite | -480 | 534 | -786 |
| Up. Granite | 450 | 534 | -786 |
| Up. Granite | 295 | -481 | -786 |
| Translation | -475 | -414 | -427 |
| Translation | -465 | 407 | -427 |
| Translation | 475 | 424 | -427 |
| Translation | 475 | -419 | -427 |
| Tilt | -385 | -300 | -417 |
| Tilt | -420 | 280 | -417 |
| Tilt | 420 | 280 | -417 |
| Tilt | 380 | -300 | -417 |
| Spindle | -155 | -90 | -594 |
| Spindle | 0 | 180 | -594 |
| Spindle | 155 | -90 | -594 |
| Hexapod | -64 | -64 | -270 |
| Hexapod | -64 | 64 | -270 |
| Hexapod | 64 | 64 | -270 |
| Hexapod | 64 | -64 | -270 |
%% Load Accelerometer positions
acc_pos = readtable('mat/acc_pos.txt', 'ReadVariableNames', false);
acc_pos = table2array(acc_pos(:, 1:4));
[~, i] = sort(acc_pos(:, 1));
acc_pos = acc_pos(i, 2:4);Hammer Impacts
<<ssec:modal_hammer_impacts>>
The chosen location of the hammer impact corresponds to the location of accelerometer number $11$ fixed to the translation stage. It was chosen to match the location of one accelerometer, because a point measurement (i.e. a measurement of $H_{kk}$) is necessary to be able to reconstruct the full FRF matrix cite:ewins00_modal.
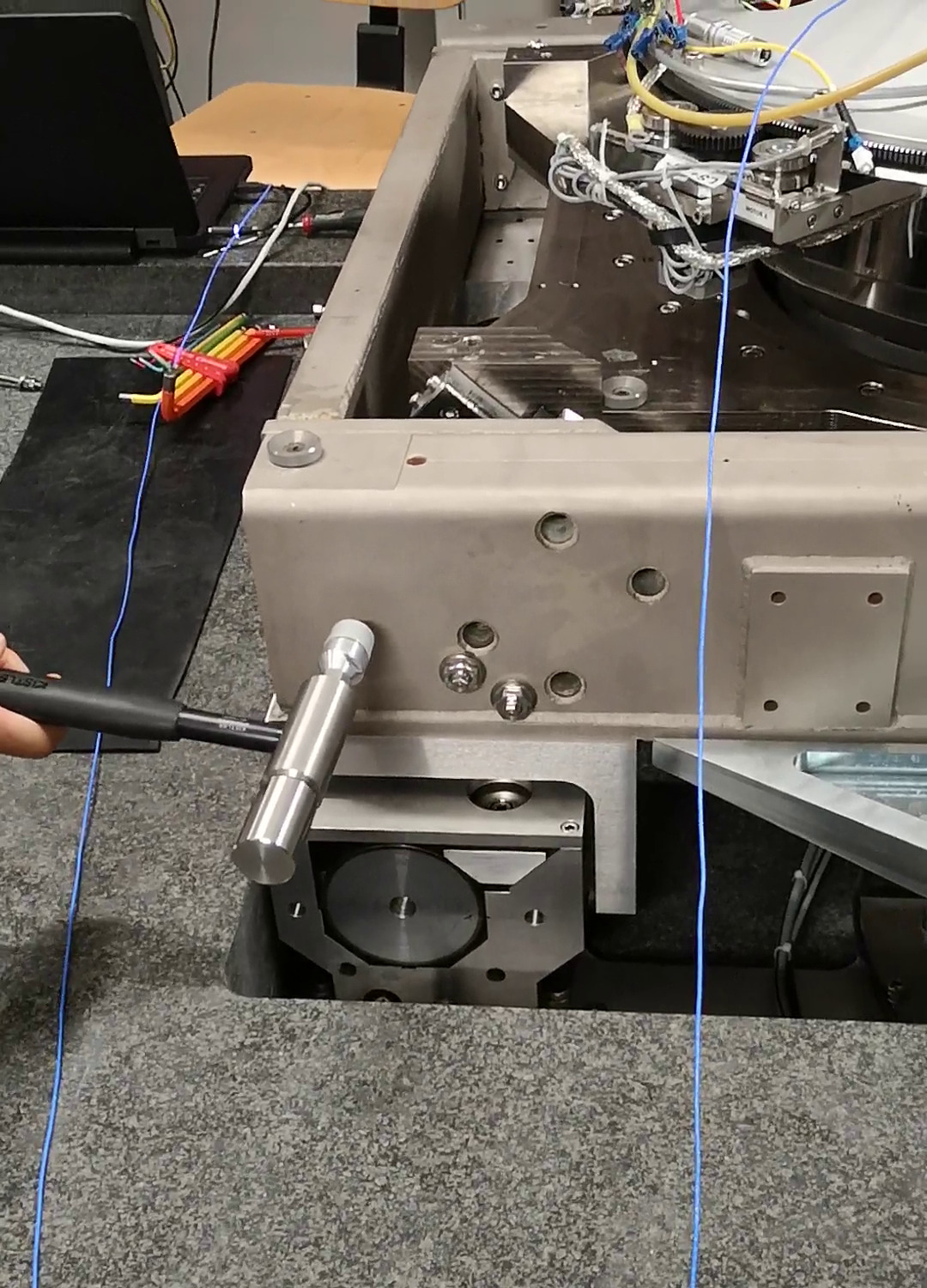
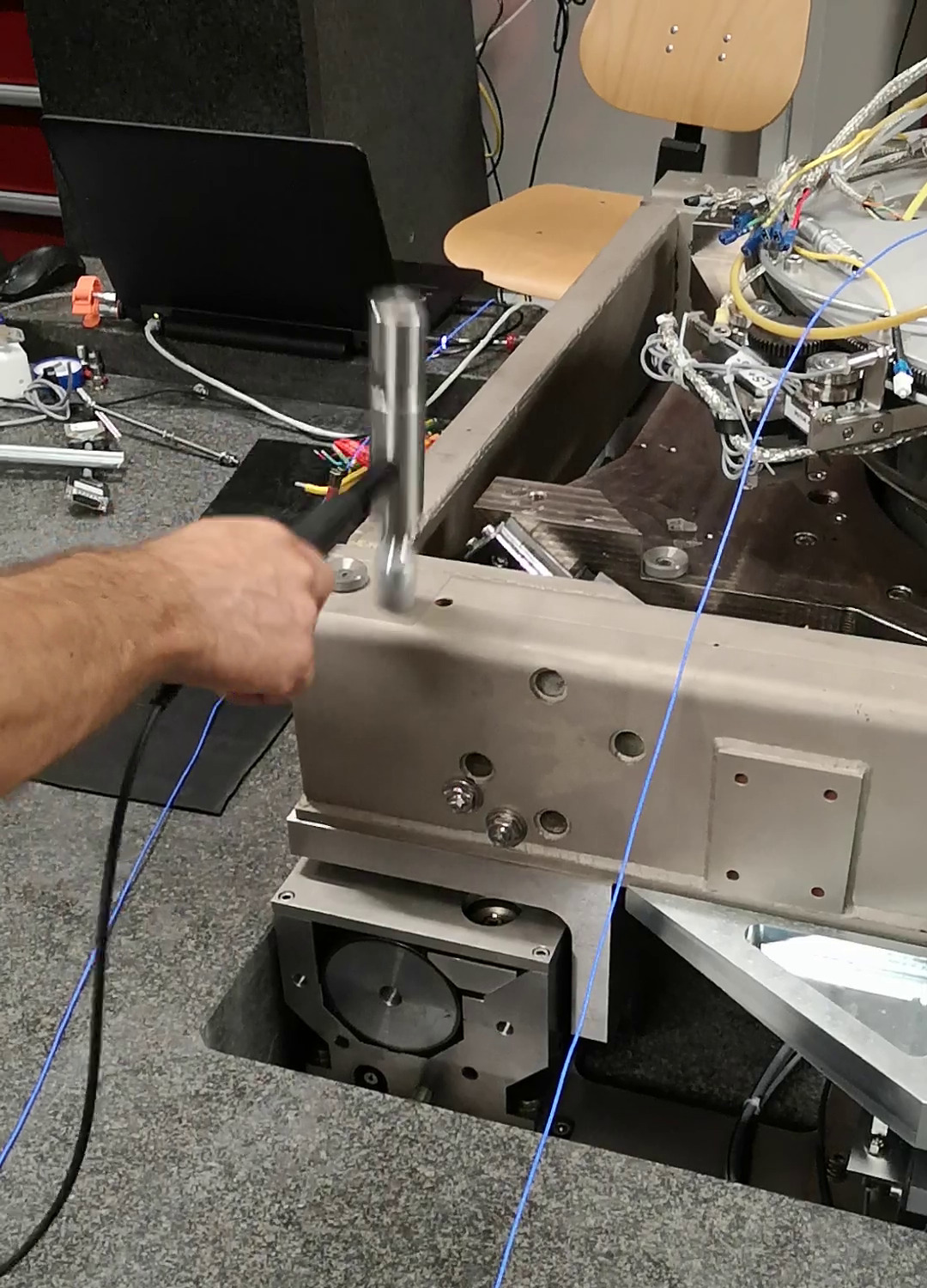
The impacts are performed in three directions, which are shown in figures ref:fig:modal_impact_x, ref:fig:modal_impact_y and ref:fig:modal_impact_z. This excitation point and the three considered directions allows to properly excite all the modes in the frequency band of interest and to provide good coherence for all the accelerometers as will be shown in the next section.
Force and Response signals
<<ssec:modal_measured_signals>>
The force sensor and the accelerometers signals are shown in the time domain in Figure ref:fig:modal_raw_meas. Sharp "impacts" can be seen for the force sensor, indicating wide frequency band excitation. For the accelerometer, many resonances can be seen on the right, indicating complex dynamics.
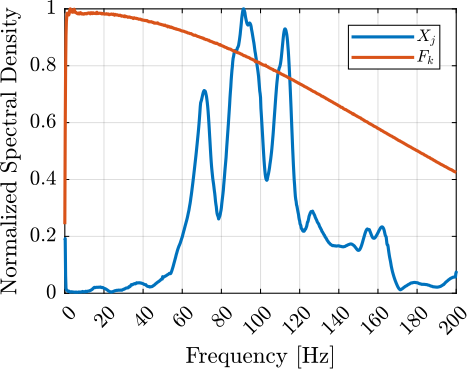
The "normalized" amplitude spectral density of the two signals are computed and shown in Figure ref:fig:modal_asd_acc_force. Conclusions based on the time domain signals can be clearly seen in the frequency domain (wide frequency content for the force signal and complex dynamics for the accelerometer).
%% Load raw data
meas1_raw = load('mat/meas_raw_1.mat');
% Sampling Frequency [Hz]
Fs = 1/meas1_raw.Track1_X_Resolution;
% Time just before the impact occurs [s]
impacts = [5.937, 11.228, 16.681, 22.205, 27.350, 32.714, 38.115, 43.888, 50.407]-0.01;
% Time vector [s]
time = linspace(0, meas1_raw.Track1_X_Resolution*length(meas1_raw.Track1), length(meas1_raw.Track1));%% Frequency Analysis
Nfft = floor(5.0*Fs); % Number of frequency points
win = hanning(Nfft); % Windowing
Noverlap = floor(Nfft/2); % Overlap for frequency analysis
%% Comnpute the power spectral density of the force and acceleration
[pxx_force, f] = pwelch(meas1_raw.Track1, win, Noverlap, Nfft, Fs);
[pxx_acc, ~] = pwelch(meas1_raw.Track2, win, Noverlap, Nfft, Fs);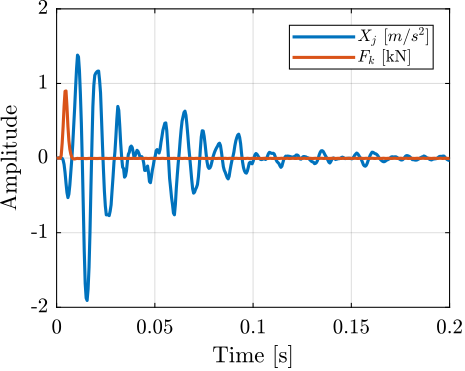
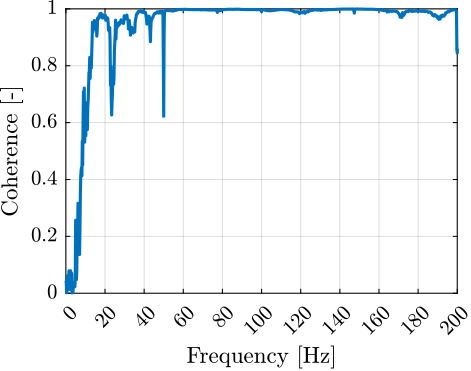
The frequency response function from the applied force $F_{k}$ to the measured acceleration $X_j$ is then computed and shown Figure ref:fig:modal_frf_acc_force. The quality of the obtained data can be estimated using the coherence function, which is shown in Figure ref:fig:modal_coh_acc_force. Good coherence is obtained from $20\,\text{Hz}$ to $200\,\text{Hz}$ which corresponds to the frequency range of interest.
%% Compute the transfer function and Coherence
[G1, f] = tfestimate(meas1_raw.Track1, meas1_raw.Track2, win, Noverlap, Nfft, Fs);
[coh1, ~] = mscohere( meas1_raw.Track1, meas1_raw.Track2, win, Noverlap, Nfft, Fs);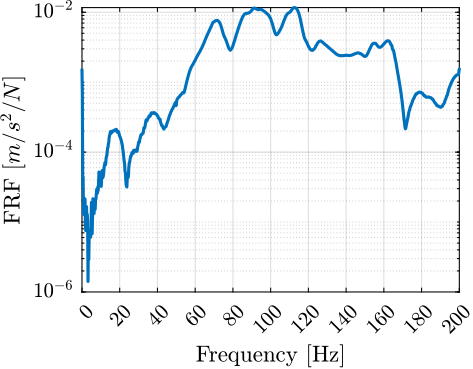
Frequency Analysis
<<sec:modal_frf_processing>>
Introduction ignore
The measurements have been conducted and a $n \times p \times q$ Frequency Response Functions Matrix has been computed with:
- $n$: the number of output measured accelerations: $23 \times 3 = 69$ (23 accelerometers measuring 3 directions each)
- $p$: the number of input force excitations: $3$
- $q$: the number of frequency points $\omega_i$
Thus, the FRF matrix is an $69 \times 3 \times 801$ matrix.
For each frequency point $\omega_i$, a 2D matrix is obtained that links the 3 force inputs to the 69 output accelerations:
\begin{equation} \text{FRF}(\omega_i) = \begin{bmatrix} \frac{D_{1_x}}{F_x}(\omega_i) & \frac{D_{1_x}}{F_y}(\omega_i) & \frac{D_{1_x}}{F_z}(\omega_i) \\ \frac{D_{1_y}}{F_x}(\omega_i) & \frac{D_{1_y}}{F_y}(\omega_i) & \frac{D_{1_y}}{F_z}(\omega_i) \\ \frac{D_{1_z}}{F_x}(\omega_i) & \frac{D_{1_z}}{F_y}(\omega_i) & \frac{D_{1_z}}{F_z}(\omega_i) \\ \frac{D_{2_x}}{F_x}(\omega_i) & \frac{D_{2_x}}{F_y}(\omega_i) & \frac{D_{2_x}}{F_z}(\omega_i) \\ \vdots & \vdots & \vdots \\ \frac{D_{23_z}}{F_x}(\omega_i) & \frac{D_{23_z}}{F_y}(\omega_i) & \frac{D_{23_z}}{F_z}(\omega_i) \\ \end{bmatrix} \end{equation}However, for the multi-body model being developed, only 6 solid bodies are considered, namely: the bottom granite, the top granite, the translation stage, the tilt stage, the spindle and the hexapod. Therefore, only $6 \times 6 = 36$ degrees of freedom are of interest.
The objective in this section is therefore to process the Frequency Response Matrix to reduce the number of measured DoFs from 69 to 36.
In order to be able to perform this reduction of measured DoFs, the measures stages have to behave as rigid bodies in the frequency band of interest. This
ref:ssec:modal_solid_body_first_check
To go from the accelerometers DoFs to the solid body 6 DoFs (three translations and three rotations), some computations have to be performed. This is explained in Section ref:ssec:modal_acc_to_solid_dof.
Finally, the $69 \times 3 \times 801$ frequency response matrix is reduced to a $36 \times 3 \times 801$ frequency response matrix where the motion of each solid body is expressed with respect to the CoM of the solid body (Section ref:ssec:modal_frf_com).
To validate this reduction of DoF and the solid body assumption, the frequency response function at the accelerometer location are synthesized from the reduced frequency response matrix and are compared with the initial measurements in Section ref:ssec:modal_solid_body_assumption.
First verification of the solid body assumption
<<ssec:modal_solid_body_first_check>> In this section, it is shown that two accelerometers fixed to a rigid body at positions $\vec{p}_1$ and $\vec{p}_2$ in such a way that $\vec{p}_2 = \vec{p}_1 + \alpha \vec{x}$ will measure the same value in the $\vec{x}$ direction. Such situation is illustrated on Figure ref:fig:modal_aligned_accelerometers and is the case for many accelerometers as shown in Figure ref:fig:modal_location_accelerometers.
\newcommand\irregularcircle[2]{% radius, irregularity
\pgfextra {\pgfmathsetmacro\len{(#1)+rand*(#2)}}
+(0:\len pt)
\foreach \a in {10,20,...,350}{
\pgfextra {\pgfmathsetmacro\len{(#1)+rand*(#2)}}
-- +(\a:\len pt)
} -- cycle
}
\begin{tikzpicture}
\draw[rounded corners=1mm, fill=blue!30!white] (0, 0) \irregularcircle{3cm}{1mm};
\node[] (origin) at (4, -1) {$\bullet$};
\begin{scope}[shift={(origin)}]
\def\axissize{0.8cm}
\draw[->] (0, 0) -- ++(\axissize, 0) node[above left]{$x$};
\draw[->] (0, 0) -- ++(0, \axissize) node[below right]{$y$};
\draw[fill, color=black] (0, 0) circle (0.05*\axissize);
\node[draw, circle, inner sep=0pt, minimum size=0.4*\axissize, label=left:$z$] (yaxis) at (0, 0){};
\node[below right] at (0, 0){$\{O\}$};
\end{scope}
\coordinate[] (p1) at (-1.5, 1.5);
\coordinate[] (p2) at ( 1.5, 1.5);
\draw[->] (p1)node[]{$\bullet$}node[above]{$p_1$} -- ++(1, 0)node[above]{$\delta p_{x1}$};
\draw[->] (p2)node[]{$\bullet$}node[above]{$p_2$} -- ++(1, 0)node[above]{$\delta p_{x2}$};
\draw[dashed] ($(p1)+(-1, 0)$) -- ($(p2)+(2, 0)$);
\end{tikzpicture}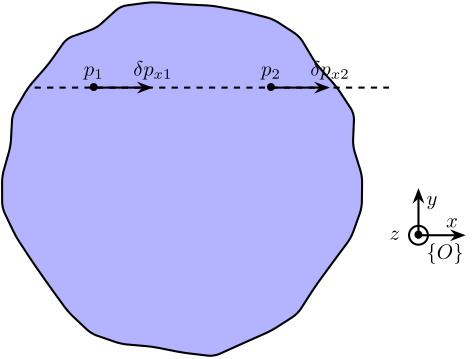
The motion of the rigid body of figure ref:fig:modal_aligned_accelerometers can be defined by its displacement $\delta \vec{p}$ and rotation $\vec{\Omega}$ with respect to a reference frame $\{O\}$.
The motions at points $1$ and $2$ are:
\begin{align*} \delta \vec{p}_1 &= \delta \vec{p} + \vec{\Omega} \times \vec{p}_1 \\ \delta \vec{p}_2 &= \delta \vec{p} + \vec{\Omega} \times \vec{p}_2 \end{align*}Taking only the $x$ direction:
\begin{align*} \delta p_{x1} &= \delta p_x + \Omega_y p_{z1} - \Omega_z p_{y1} \\ \delta p_{x2} &= \delta p_x + \Omega_y p_{z2} - \Omega_z p_{y2} \end{align*}However, we have $p_{1y} = p_{2y}$ and $p_{1z} = p_{2z}$ because of the co-linearity of the two sensors in the $x$ direction, and thus we obtain:
\begin{equation} \boxed{\delta p_{x1} = \delta p_{x2}} \end{equation}It is therefore concluded that two position sensors fixed to a rigid body will measure the same quantity in the direction "linking" the two sensors.
Such property can be used to verify that the considered stages are indeed behaving as rigid body in the frequency band of interest.
From Table ref:tab:modal_position_accelerometers, we can identify which pair of accelerometers are aligned in the X and Y directions.
The response in the X direction of pairs of sensors aligned in the X direction are compared in Figure ref:fig:modal_solid_body_comp_x_dir. Good match is observed up to 200Hz. Similar result is obtained for the Y direction.
%% Load frequency response matrix
load('frf_matrix.mat', 'freqs', 'frf');%% Accelerometers ID connected to each solid body
solids = {};
solids.gbot = [17, 18, 19, 20]; % bottom granite
solids.gtop = [13, 14, 15, 16]; % top granite
solids.ty = [9, 10, 11, 12]; % Ty stage
solids.ry = [5, 6, 7, 8]; % Ry stage
solids.rz = [21, 22, 23]; % Rz stage
solids.hexa = [1, 2, 3, 4]; % Hexapod
% Names of the solid bodies
solid_names = fields(solids);%% Save the acceleromter positions are well as the solid bodies
save('mat/geometry.mat', 'solids', 'solid_names', 'acc_pos');%% Save the acceleromter positions are well as the solid bodies
save('matlab/mat/geometry.mat', 'solids', 'solid_names', 'acc_pos');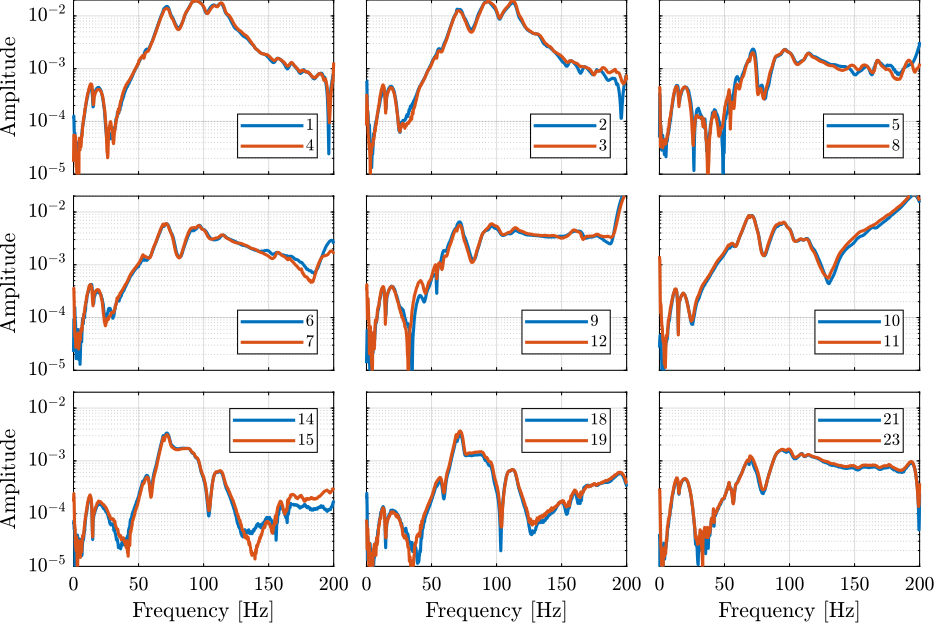
From accelerometer DOFs to solid body DOFs
<<ssec:modal_acc_to_solid_dof>> Let's consider the schematic shown in Figure ref:fig:modal_local_to_global_coordinates where the motion of a solid body is measured at 4 distinct locations (in $x$, $y$ and $z$ directions).
The goal here is to link these $4 \times 3 = 12$ measurements to the 6 DOFs of the solid body expressed in the frame $\{O\}$.
\newcommand\irregularcircle[2]{% radius, irregularity
\pgfextra {\pgfmathsetmacro\len{(#1)+rand*(#2)}}
+(0:\len pt)
\foreach \a in {10,20,...,350}{
\pgfextra {\pgfmathsetmacro\len{(#1)+rand*(#2)}}
-- +(\a:\len pt)
} -- cycle
}
\begin{tikzpicture}
\draw[rounded corners=1mm, fill=blue!30!white] (0, 0) \irregularcircle{3cm}{1mm};
\node[] (origin) at (4, -1) {$\bullet$};
\begin{scope}[shift={(origin)}]
\def\axissize{0.8cm}
\draw[->] (0, 0) -- ++(\axissize, 0) node[above left]{$x$};
\draw[->] (0, 0) -- ++(0, \axissize) node[below right]{$y$};
\draw[fill, color=black] (0, 0) circle (0.05*\axissize);
\node[draw, circle, inner sep=0pt, minimum size=0.4*\axissize, label=left:$z$] (yaxis) at (0, 0){};
\node[below right] at (0, 0){$\{O\}$};
\end{scope}
\coordinate[] (p1) at (-1.5, -1.5);
\coordinate[] (p2) at (-1.5, 1.5);
\coordinate[] (p3) at ( 1.5, 1.5);
\coordinate[] (p4) at ( 1.5, -1.5);
\draw[->] (p1)node[]{$\bullet$}node[above]{$\vec{p}_1$} -- ++( 1 , 0.5)node[right]{$\delta \vec{p}_1$};
\draw[->] (p2)node[]{$\bullet$}node[above]{$\vec{p}_2$} -- ++(-0.5, 1 )node[right]{$\delta \vec{p}_2$};
\draw[->] (p3)node[]{$\bullet$}node[above]{$\vec{p}_3$} -- ++( 1 , 0.5)node[right]{$\delta \vec{p}_3$};
\draw[->] (p4)node[]{$\bullet$}node[above]{$\vec{p}_4$} -- ++( 0.5, 1 )node[right]{$\delta \vec{p}_4$};
\end{tikzpicture}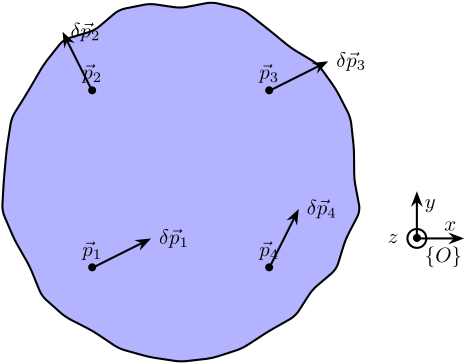
Let's consider the motion of the rigid body defined by its displacement $\delta \vec{p}$ and rotation $\delta\vec{\Omega}$ with respect to the reference frame $\{O\}$.
From the figure ref:fig:modal_local_to_global_coordinates, we can write:
\begin{align*} \delta \vec{p}_1 &= \delta \vec{p} + \bm{\delta \Omega} \vec{p}_1\\ \delta \vec{p}_2 &= \delta \vec{p} + \bm{\delta \Omega} \vec{p}_2\\ \delta \vec{p}_3 &= \delta \vec{p} + \bm{\delta \Omega} \vec{p}_3\\ \delta \vec{p}_4 &= \delta \vec{p} + \bm{\delta \Omega} \vec{p}_4 \end{align*}With
\begin{equation} \bm{\delta\Omega} = \begin{bmatrix} 0 & -\delta\Omega_z & \delta\Omega_y \\ \delta\Omega_z & 0 & -\delta\Omega_x \\ -\delta\Omega_y & \delta\Omega_x & 0 \end{bmatrix} \end{equation}We can rearrange the equations in a matrix form:
\begin{equation} \left[\begin{array}{ccc|ccc} 1 & 0 & 0 & 0 & p_{1z} & -p_{1y} \\ 0 & 1 & 0 & -p_{1z} & 0 & p_{1x} \\ 0 & 0 & 1 & p_{1y} & -p_{1x} & 0 \\ \hline & \vdots & & & \vdots & \\ \hline 1 & 0 & 0 & 0 & p_{4z} & -p_{4y} \\ 0 & 1 & 0 & -p_{4z} & 0 & p_{4x} \\ 0 & 0 & 1 & p_{4y} & -p_{4x} & 0 \end{array}\right] \left[\begin{array}{c} \delta p_x \\ \delta p_y \\ \delta p_z \\ \hline \delta\Omega_x \\ \delta\Omega_y \\ \delta\Omega_z \end{array}\right] = \left[\begin{array}{c} \delta p_{1x} \\ \delta p_{1y} \\ \delta p_{1z} \\\hline \vdots \\\hline \delta p_{4x} \\ \delta p_{4y} \\ \delta p_{4z} \end{array}\right] \end{equation}and then we obtain the velocity and rotation of the solid in the wanted frame $\{O\}$:
\begin{equation} \left[\begin{array}{c} \delta p_x \\ \delta p_y \\ \delta p_z \\ \hline \delta\Omega_x \\ \delta\Omega_y \\ \delta\Omega_z \end{array}\right] = \left[\begin{array}{ccc|ccc} 1 & 0 & 0 & 0 & p_{1z} & -p_{1y} \\ 0 & 1 & 0 & -p_{1z} & 0 & p_{1x} \\ 0 & 0 & 1 & p_{1y} & -p_{1x} & 0 \\ \hline & \vdots & & & \vdots & \\ \hline 1 & 0 & 0 & 0 & p_{4z} & -p_{4y} \\ 0 & 1 & 0 & -p_{4z} & 0 & p_{4x} \\ 0 & 0 & 1 & p_{4y} & -p_{4x} & 0 \end{array}\right]^{-1} \left[\begin{array}{c} \delta p_{1x} \\ \delta p_{1y} \\ \delta p_{1z} \\\hline \vdots \\\hline \delta p_{4x} \\ \delta p_{4y} \\ \delta p_{4z} \end{array}\right] \label{eq:modal_determine_global_disp} \end{equation}Using equation eqref:eq:modal_determine_global_disp, we can determine the motion of the solid body expressed in a chosen frame $\{O\}$ using the accelerometers attached to it. The inversion is equivalent to resolving a mean square problem.
Frequency Response Matrix expressed at the Center of Mass
<<ssec:modal_frf_com>>
What reference frame to choose?
The question we wish here to answer is how to choose the reference frame $\{O\}$ in which the DOFs of the solid bodies are defined.
The possibles choices are:
- One frame for each solid body which is located at its center of mass
- One common frame, for instance located at the point of interest ($270mm$ above the Hexapod)
- Base located at the joint position: this is where we want to see the motion and estimate stiffness
| Chosen Frame | Advantages | Disadvantages |
|---|---|---|
| Frames at CoM | Physically, it makes more sense | How to compare the motion of the solid bodies? |
| Common Frame | We can compare the motion of each solid body | Small $\theta_{x, y}$ may result in large $T_{x, y}$ |
| Frames at joint position | Directly gives which joint direction can be blocked | How to choose the joint position? |
The choice of the frame depends of what we want to do with the data.
One of the goals is to compare the motion of each solid body to see which relative DOFs between solid bodies can be neglected, that is to say, which joint between solid bodies can be regarded as perfect (and this in all the frequency range of interest). Ideally, we would like to have the same number of degrees of freedom than the number of identified modes.
In the next sections, we will express the FRF matrix in the different frames.
Center of Mass of each solid body
From solidworks, we can export the position of the center of mass of each solid body considered. These are summarized in Table ref:tab:modal_com_solid_bodies
%% Extract the CoM of considered solid bodies
model_com = reshape(table2array(readtable('mat/model_solidworks_com.txt', 'ReadVariableNames', false)), [3, 6]);| $X$ [mm] | $Y$ [mm] | $Z$ [mm] | |
|---|---|---|---|
| Bottom Granite | 45 | 144 | -1251 |
| Top granite | 52 | 258 | -778 |
| Translation stage | 0 | 14 | -600 |
| Tilt Stage | 0 | -5 | -628 |
| Spindle | 0 | 0 | -580 |
| Hexapod | -4 | 6 | -319 |
Computation
First, we initialize a new FRF matrix which is an $n \times p \times q$ with:
- $n$ is the number of DOFs of the considered 6 solid-bodies: $6 \times 6 = 36$
- $p$ is the number of excitation inputs: $3$
- $q$ is the number of frequency points $\omega_i$
For each frequency point $\omega_i$, the FRF matrix is a $n\times p$ matrix:
\begin{equation} \text{FRF}_\text{CoM}(\omega_i) = \begin{bmatrix} \frac{D_{1,T_x}}{F_x}(\omega_i) & \frac{D_{1,T_x}}{F_y}(\omega_i) & \frac{D_{1,T_x}}{F_z}(\omega_i) \\ \frac{D_{1,T_y}}{F_x}(\omega_i) & \frac{D_{1,T_y}}{F_y}(\omega_i) & \frac{D_{1,T_y}}{F_z}(\omega_i) \\ \frac{D_{1,T_z}}{F_x}(\omega_i) & \frac{D_{1,T_z}}{F_y}(\omega_i) & \frac{D_{1,T_z}}{F_z}(\omega_i) \\ \frac{D_{1,R_x}}{F_x}(\omega_i) & \frac{D_{1,R_x}}{F_y}(\omega_i) & \frac{D_{1,R_x}}{F_z}(\omega_i) \\ \frac{D_{1,R_y}}{F_x}(\omega_i) & \frac{D_{1,R_y}}{F_y}(\omega_i) & \frac{D_{1,R_y}}{F_z}(\omega_i) \\ \frac{D_{1,R_z}}{F_x}(\omega_i) & \frac{D_{1,R_z}}{F_y}(\omega_i) & \frac{D_{1,R_z}}{F_z}(\omega_i) \\ \frac{D_{2,T_x}}{F_x}(\omega_i) & \frac{D_{2,T_x}}{F_y}(\omega_i) & \frac{D_{2,T_x}}{F_z}(\omega_i) \\ \vdots & \vdots & \vdots \\ \frac{D_{6,R_z}}{F_x}(\omega_i) & \frac{D_{6,R_z}}{F_y}(\omega_i) & \frac{D_{6,R_z}}{F_z}(\omega_i) \end{bmatrix} \end{equation}where 1, 2, …, 6 corresponds to the 6 solid bodies.
Then, as we know the positions of the accelerometers on each solid body, and we have the response of those accelerometers, we can use the equations derived in the previous section to determine the response of each solid body expressed in their center of mass.
%% Frequency Response Matrix - Response expressed at the CoM of the solid bodies
FRFs_CoM = zeros(length(solid_names)*6, 3, 801);
for solid_i = 1:length(solid_names)
% Number of accelerometers fixed to this solid body
solids_i = solids.(solid_names{solid_i});
% "Jacobian" matrix to go from accelerometer frame to CoM frame
A = zeros(3*length(solids_i), 6);
for i = 1:length(solids_i)
acc_i = solids_i(i);
acc_pos_com = acc_pos(acc_i, :).' - model_com(:, solid_i);
A(3*(i-1)+1:3*i, 1:3) = eye(3);
A(3*(i-1)+1:3*i, 4:6) = [ 0 acc_pos_com(3) -acc_pos_com(2) ;
-acc_pos_com(3) 0 acc_pos_com(1) ;
acc_pos_com(2) -acc_pos_com(1) 0];
end
for exc_dir = 1:3
FRFs_CoM((solid_i-1)*6+1:solid_i*6, exc_dir, :) = A\squeeze(frf((solids_i(1)-1)*3+1:solids_i(end)*3, exc_dir, :));
end
end%% Save the computed FRF at the CoM
save('mat/frf_com.mat', 'FRFs_CoM');%% Save the computed FRF at the CoM
save('matlab/mat/frf_com.mat', 'FRFs_CoM');Verify that we find the original FRF from the FRF in the global coordinates
<<ssec:modal_solid_body_assumption>>
We have computed the Frequency Response Functions Matrix representing the response of the 6 solid bodies in their 6 DOFs with respect to their center of mass.
From the response of one body in its 6 DOFs, we should be able to compute the FRF of each of its accelerometer fixed to it during the measurement, supposing that this stage is a solid body.
We can then compare the result with the original measurements. This will help us to determine if:
- the previous inversion used is correct
- the solid body assumption is correct in the frequency band of interest
From the translation $\delta p$ and rotation $\delta \Omega$ of a solid body and the positions $p_i$ of the accelerometers attached to it, we can compute the response that would have been measured by the accelerometers using the following formula:
\begin{align*} \delta p_1 &= \delta p + \delta\Omega p_1\\ \delta p_2 &= \delta p + \delta\Omega p_2\\ \delta p_3 &= \delta p + \delta\Omega p_3\\ \delta p_4 &= \delta p + \delta\Omega p_4 \end{align*}
Thus, we can obtain the FRF matrix FRFs_A that gives the responses of the accelerometers to the forces applied by the hammer.
It is implemented in matlab as follow:
FRFs_A = zeros(size(frf));
% For each excitation direction
for exc_dir = 1:3
% For each solid
for solid_i = 1:length(solid_names)
v0 = squeeze(FRFs_CoM((solid_i-1)*6+1:(solid_i-1)*6+3, exc_dir, :));
W0 = squeeze(FRFs_CoM((solid_i-1)*6+4:(solid_i-1)*6+6, exc_dir, :));
% For each accelerometer attached to the current solid
for acc_i = solids.(solid_names{solid_i})
% We get the position of the accelerometer expressed in frame O
pos = acc_pos(acc_i, :).' - model_com(:, solid_i);
% pos = acc_pos(acc_i, :).';
posX = [0 pos(3) -pos(2); -pos(3) 0 pos(1) ; pos(2) -pos(1) 0];
FRFs_A(3*(acc_i-1)+1:3*(acc_i-1)+3, exc_dir, :) = v0 + posX*W0;
end
end
end
We then compare the original FRF measured for each accelerometer FRFs with the "recovered" FRF FRFs_A from the global FRF matrix in the common frame.
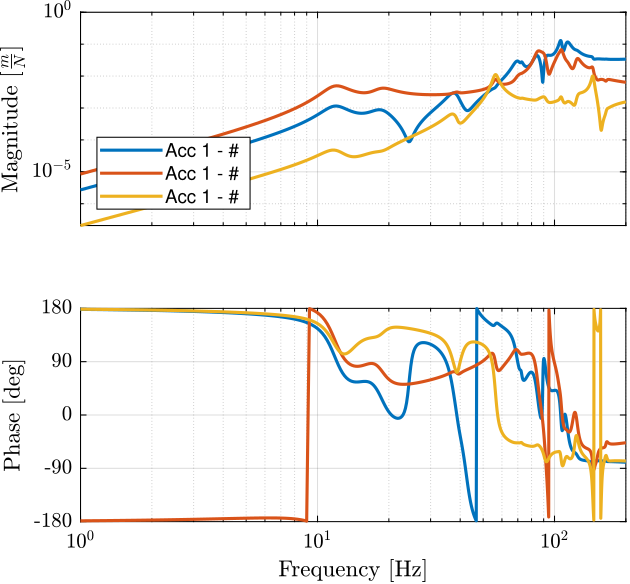
The FRF for the 4 accelerometers on the Hexapod are compared in Figure ref:fig:modal_comp_acc_solid_body_frf. All the FRF are matching very well in all the frequency range displayed.
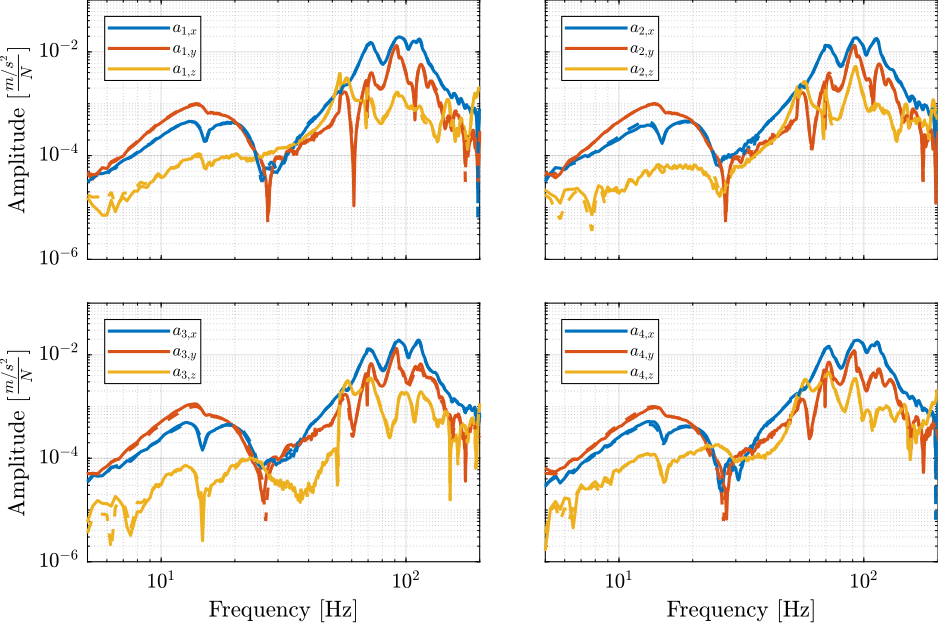
The reduction of the number of degrees of freedom from 69 (23 accelerometers with each 3DOF) to 36 (6 solid bodies with 6 DOF) seems to work well.
This confirms the fact that the stages are indeed behaving as a solid body in the frequency band of interest. This valid the fact that a multi-body model can be used to represent the dynamics of the micro-station.
Modal Analysis
<<sec:modal_analysis>>
Introduction ignore
The goal here is to extract the modal parameters describing the modes of station being studied, namely:
- the eigen frequencies and the modal damping (eigen values)
- the mode shapes (eigen vectors)
This is done from the FRF matrix previously extracted from the measurements.
In order to do the modal parameter extraction, we first have to estimate the order of the modal model we want to obtain. This corresponds to how many modes are present in the frequency band of interest. In section ref:ssec:modal_number_of_modes, we will use the Singular Value Decomposition and the Modal Indication Function to estimate the number of modes.
The modal parameter extraction methods generally consists of curve-fitting a theoretical expression for an individual FRF to the actual measured data. However, there are multiple level of complexity:
- works on a part of a single FRF curve
- works on a complete curve encompassing several resonances
- works on a set of many FRF plots all obtained from the same structure
The third method is the most complex but gives better results. This is the one we will use in section ref:ssec:modal_parameter_extraction.
From the modal model, it is possible to obtain a graphic display of the mode shapes (section ref:ssec:modal_mode_shapes).
In order to validate the quality of the modal model, we will synthesize the FRF matrix from the modal model and compare it with the FRF measured (section ref:ssec:modal_model_validity).
The modes of the structure are expected to be complex, however real modes are easier to work with when it comes to obtain a spatial model from the modal parameters.
Determine the number of modes
<<ssec:modal_number_of_modes>>
Singular Value Decomposition - Modal Indication Function
The Mode Indicator Functions are usually used on $n\times p$ FRF matrix where $n$ is a relatively large number of measurement DOFs and $p$ is the number of excitation DOFs, typically 3 or 4.
In these methods, the frequency dependent FRF matrix is subjected to a singular value decomposition analysis which thus yields a small number (3 or 4) of singular values, these also being frequency dependent.
These methods are used to determine the number of modes present in a given frequency range, to identify repeated natural frequencies and to pre-process the FRF data prior to modal analysis.
From the documentation of the modal software:
The MIF consist of the singular values of the Frequency response function matrix. The number of MIFs equals the number of excitations. By the powerful singular value decomposition, the real signal space is separated from the noise space. Therefore, the MIFs exhibit the modes effectively. A peak in the MIFs plot usually indicate the existence of a structural mode, and two peaks at the same frequency point means the existence of two repeated modes. Moreover, the magnitude of the MIFs implies the strength of the a mode.
The Complex Mode Indicator Function is defined simply by the SVD of the FRF (sub) matrix:
\begin{align*} [H(\omega)]_{n\times p} &= [U(\omega)]_{n\times n} [\Sigma(\omega)]_{n\times p} [V(\omega)]_{p\times p}^H\\ [CMIF(\omega)]_{p\times p} &= [\Sigma(\omega)]_{p\times n}^T [\Sigma(\omega)]_{n\times p} \end{align*}We compute the Complex Mode Indicator Function. The result is shown on Figure ref:fig:modal_indication_function.
%% Computation of the modal indication function
MIF = zeros(size(frf, 2), size(frf, 2), size(frf, 3));
for i = 1:length(freqs)
[~,S,~] = svd(frf(:, :, i));
MIF(:, :, i) = S'*S;
end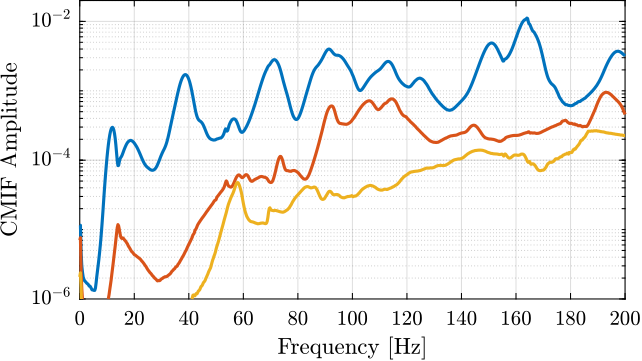
Composite Response Function
An alternative is the Composite Response Function $HH(\omega)$ defined as the sum of all the measured FRF:
\begin{equation} HH(\omega) = \sum_j\sum_kH_{jk}(\omega) \end{equation}Instead, we choose here to use the sum of the norms of the measured frf:
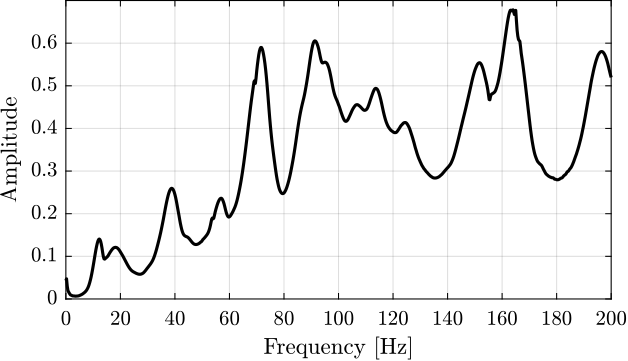
\begin{equation} HH(\omega) = \sum_j\sum_k \left|H_{jk}(\omega) \right| \end{equation}The result is shown on figure ref:fig:modal_composite_reponse_function.
Modal parameter extraction
<<ssec:modal_parameter_extraction>>
OROS - Modal software
Modal identification are done within the Modal software of OROS.
Several modal parameter extraction methods are available. We choose to use the "broad band" method as it permits to identify the modal parameters using all the FRF curves at the same time. It takes into account the fact the the properties of all the individual curves are related by being from the same structure: all FRF plots on a given structure should indicate the same values for the natural frequencies and damping factor of each mode.
Such method also have the advantage of producing a unique and consistent model as direct output.
In order to apply this method, we select the frequency range of interest and we give an estimate of how many modes are present.
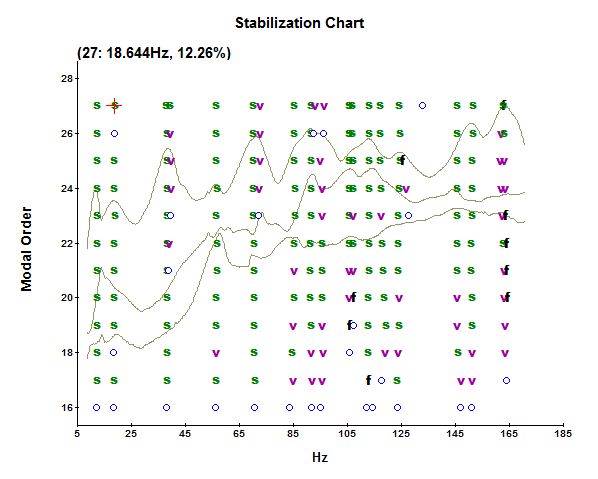
Then, it shows a stabilization charts, such as the one shown on figure ref:fig:modal_stabilization_chart, where we have to manually select which modes to take into account in the modal model.
We can then run the modal analysis, and the software will identify the modal damping and mode shapes at the selected frequency modes.
Importation of the modal parameters on Matlab
The obtained modal parameters are:
- Resonance frequencies in Hertz
- Modal damping ratio in percentage
- (complex) Modes shapes for each measured DoF
- Modal A and modal B which are parameters important for further normalization
%% Load modal parameters
shapes_m = readtable('mat/mode_shapes.txt', 'ReadVariableNames', false); % [Sign / Real / Imag]
freqs_m = table2array(readtable('mat/mode_freqs.txt', 'ReadVariableNames', false)); % in [Hz]
damps_m = table2array(readtable('mat/mode_damps.txt', 'ReadVariableNames', false)); % in [%]
modal_a = table2array(readtable('mat/mode_modal_a.txt', 'ReadVariableNames', false)); % [Real / Imag]
modal_b = table2array(readtable('mat/mode_modal_b.txt', 'ReadVariableNames', false)); % [Real / Imag]%% Guess the number of modes identified from the length of the imported data.
acc_n = 23; % Number of accelerometers
dir_n = 3; % Number of directions
dirs = 'XYZ';
mod_n = size(shapes_m,1)/acc_n/dir_n; % Number of modes%% Mode shapes are split into 3 parts (direction plus sign, real part and imaginary part)
% we aggregate them into one array of complex numbers
T_sign = table2array(shapes_m(:, 1));
T_real = table2array(shapes_m(:, 2));
T_imag = table2array(shapes_m(:, 3));
mode_shapes = zeros(mod_n, dir_n, acc_n);
for mod_i = 1:mod_n
for acc_i = 1:acc_n
% Get the correct section of the signs
T = T_sign(acc_n*dir_n*(mod_i-1)+1:acc_n*dir_n*mod_i);
for dir_i = 1:dir_n
% Get the line corresponding to the sensor
i = find(contains(T, sprintf('%i%s',acc_i, dirs(dir_i))), 1, 'first')+acc_n*dir_n*(mod_i-1);
mode_shapes(mod_i, dir_i, acc_i) = str2num([T_sign{i}(end-1), '1'])*complex(T_real(i),T_imag(i));
end
end
endThe obtained mode frequencies and damping are shown in Table ref:tab:modal_obtained_modes_freqs_damps.
| Mode | Frequency [Hz] | Damping [%] |
|---|---|---|
| 1 | 11.9 | 12.2 |
| 2 | 18.6 | 11.7 |
| 3 | 37.8 | 6.2 |
| 4 | 39.1 | 2.8 |
| 5 | 56.3 | 2.8 |
| 6 | 69.8 | 4.3 |
| 7 | 72.5 | 1.3 |
| 8 | 84.8 | 3.7 |
| 9 | 91.3 | 2.9 |
| 10 | 105.5 | 3.2 |
| 11 | 106.6 | 1.6 |
| 12 | 112.7 | 3.1 |
| 13 | 124.2 | 2.8 |
| 14 | 145.3 | 1.3 |
| 15 | 150.5 | 2.4 |
| 16 | 165.4 | 1.4 |
Theory
It seems that the modal analysis software makes the assumption of viscous damping for the model with which it tries to fit the FRF measurements.
If we note $N$ the number of modes identified, then there are $2N$ eigenvalues and eigenvectors given by the software:
\begin{align} s_r &= \omega_r (-\xi_r + i \sqrt{1 - \xi_r^2}),\quad s_r^* \\ \{\psi_r\} &= \begin{Bmatrix} \psi_{1_x} & \psi_{2_x} & \dots & \psi_{23_x} & \psi_{1_y} & \dots & \psi_{1_z} & \dots & \psi_{23_z} \end{Bmatrix}^T, \quad \{\psi_r\}^* \end{align}for $r = 1, \dots, N$ where $\omega_r$ is the natural frequency and $\xi_r$ is the critical damping ratio for that mode.
Modal Matrices
We would like to arrange the obtained modal parameters into two modal matrices: \[ \Lambda = \begin{bmatrix} s_1 & & 0 \\ & \ddots & \\ 0 & & s_N \end{bmatrix}_{N \times N}; \quad \Psi = \begin{bmatrix} & & \\ \{\psi_1\} & \dots & \{\psi_N\} \\ & & \end{bmatrix}_{M \times N} \] \[ \{\psi_i\} = \begin{Bmatrix} \psi_{i, 1_x} & \psi_{i, 1_y} & \psi_{i, 1_z} & \psi_{i, 2_x} & \dots & \psi_{i, 23_z} \end{Bmatrix}^T \]
$M$ is the number of DoF: here it is $23 \times 3 = 69$. $N$ is the number of mode
eigen_val_M = diag(2*pi*freqs_m.*(-damps_m/100 + j*sqrt(1 - (damps_m/100).^2)));
eigen_vec_M = reshape(mode_shapes, [mod_n, acc_n*dir_n]).';Each eigen vector is normalized: $\| \{\psi_i\} \|_2 = 1$
However, the eigen values and eigen vectors appears as complex conjugates: \[ s_r, s_r^*, \{\psi\}_r, \{\psi\}_r^*, \quad r = 1, N \]
In the end, they are $2N$ eigen values. We then build two extended eigen matrices as follow: \[ \mathcal{S} = \begin{bmatrix} s_1 & & & & & \\ & \ddots & & & 0 & \\ & & s_N & & & \\ & & & s_1^* & & \\ & 0 & & & \ddots & \\ & & & & & s_N^* \end{bmatrix}_{2N \times 2N}; \quad \Phi = \begin{bmatrix} & & & & &\\ \{\psi_1\} & \dots & \{\psi_N\} & \{\psi_1^*\} & \dots & \{\psi_N^*\} \\ & & & & & \end{bmatrix}_{M \times 2N} \]
eigen_val_ext_M = blkdiag(eigen_val_M, conj(eigen_val_M));
eigen_vec_ext_M = [eigen_vec_M, conj(eigen_vec_M)];We also build the Modal A and Modal B matrices:
\begin{equation} A = \begin{bmatrix} a_1 & & 0 \\ & \ddots & \\ 0 & & a_N \end{bmatrix}_{N \times N}; \quad B = \begin{bmatrix} b_1 & & 0 \\ & \ddots & \\ 0 & & b_N \end{bmatrix}_{N \times N} \end{equation}With $a_i$ is the "Modal A" parameter linked to mode i.
modal_a_M = diag(complex(modal_a(:, 1), modal_a(:, 2)));
modal_b_M = diag(complex(modal_b(:, 1), modal_b(:, 2)));
modal_a_ext_M = blkdiag(modal_a_M, conj(modal_a_M));
modal_b_ext_M = blkdiag(modal_b_M, conj(modal_b_M));"Modal A" and "modal B" are linked through the following formula: \[ B = - A \Lambda \]
Obtained Mode Shapes animations
<<ssec:modal_mode_shapes>> From the modal parameters, it is possible to show the modal shapes with an animation.
Examples are shown in Figures ref:fig:modal_mode_animations.



We can learn quite a lot from these mode shape animations.
For instance, the mode shape of the first mode at 11Hz (figure ref:fig:modal_mode1_animation) seems to indicate that this corresponds to a suspension mode.
This could be due to the 4 Airloc Levelers that are used for the granite (figure ref:fig:modal_airloc).

They are probably not well leveled, so the granite is supported only by two Airloc.
Verify the validity of the Modal Model
<<ssec:modal_model_validity>>
There are two main ways to verify the validity of the modal model
- Synthesize FRF measurements that has been used to generate the modal model and compare
- Synthesize FRF that has not yet been measured. Then measure that FRF and compare
From the modal model, we want to synthesize the Frequency Response Functions that has been used to build the modal model.
Let's recall that:
- $M$ is the number of measured DOFs ($3 \times n_\text{acc}$)
- $N$ is the number of modes identified
We then have that the FRF matrix $[H_{\text{syn}}]$ can be synthesize using the following formula:
with $Q_r = 1/M_{A_r}$
An alternative formulation is: \[ H_{pq}(s_i) = \sum_{r=1}^N \frac{A_{pqr}}{s_i - \lambda_r} + \frac{A_{pqr}^*}{s_i - \lambda_r^*} \] with:
- $A_{pqr} = \frac{\psi_{pr}\psi_{qr}}{M_{A_r}}$, $M_{A_r}$ is called "Modal A"
- $\psi_{pr}$: scaled modal coefficient for output DOF $p$, mode $r$
- $\lambda_r$: complex modal frequency
From the modal software documentation:
Modal A Scaling constant for a complex mode. It has the same properties as modal mass for normal modes (undamped or proportionally damped cases). Assuming
- $\psi_{pr}$ = Modal coefficient for measured degree of freedom p and mode r
- $\psi_{qr}$ = Modal coefficient for measured degree of freedom q and mode r
- $A_{pqr}$ = Residue for measured degree of freedom p, measured degree of q and mode r
- $M_{Ar}$ = Modal A of mode r
Then \[ A_{pqr} = \frac{\psi_{pr}\psi_{qr}}{M_{Ar}} \]
Modal B Scaling constant for a complex mode. It has the same properties as modal stiffness for normal modes (undamped or proportionally damped cases). Assuming
- $M_{Ar}$ = Modal A of mode r
- $\lambda_r$ = System pole of mode r
Then \[ M_{Br} = - \lambda_r M_{Ar} \]
%% Synthesize FRF from the modal model
Hsyn = zeros(acc_n*dir_n, acc_n*dir_n, length(freqs));
for i = 1:length(freqs)
Hsyn(:, :, i) = eigen_vec_ext_M*((j*2*pi*freqs(i)).^2*inv(modal_a_ext_M)/(diag(j*2*pi*freqs(i) - diag(eigen_val_ext_M))))*eigen_vec_ext_M.';
end
%% Derivate two times to to have the acceleration response
for i = 1:size(Hsyn, 1)
Hsyn(i, :, :) = squeeze(Hsyn(i, :, :)).*(j*2*pi*freqs).^2;
endThe comparison between the original measured frequency response function and the synthesized one from the modal model is done in Figure ref:fig:modal_comp_acc_frf_modal.
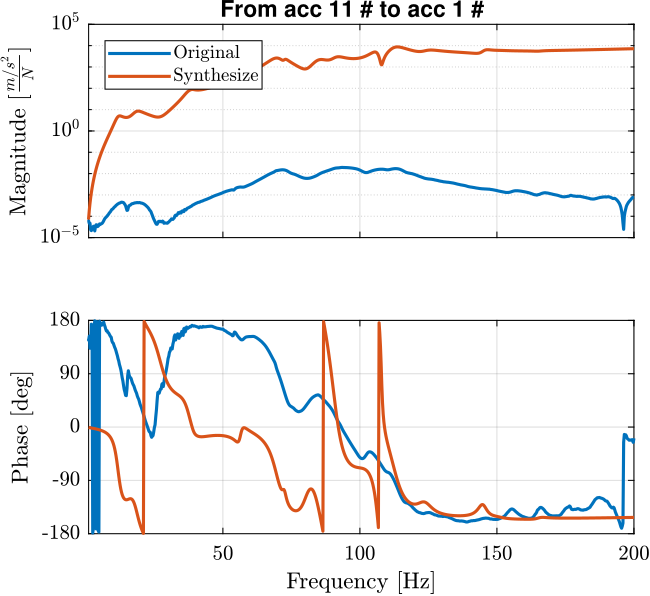
Frequency response functions that has not been measured can be synthesized as shown in Figure ref:fig:modal_synthesized_frf.
Conclusion
<<sec:modal_conclusion>>
Validation of solid body model.
Further step: go from modal model to parameters of the solid body model.