60 KiB
Micro-Station - Modal Analysis
- Glossary and Acronyms - Tables
- Introduction
- Measurement Setup
- Frequency Analysis
- Modal Analysis
- Conclusion
- Bibliography
- Glossary
- Footnotes
This report is also available as a pdf.
Glossary and Acronyms - Tables ignore
| label | name | description |
|---|---|---|
| psdx | \ensuremath{Φx} | Power spectral density of signal $x$ |
| asdx | \ensuremath{Γx} | Amplitude spectral density of signal $x$ |
| cpsx | \ensuremath{Φx} | Cumulative Power Spectrum of signal $x$ |
| casx | \ensuremath{Γx} | Cumulative Amplitude Spectrum of signal $x$ |
| key | abbreviation | full form |
|---|---|---|
| nass | NASS | Nano Active Stabilization System |
| asd | ASD | Amplitude Spectral Density |
| psd | PSD | Power Spectral Density |
| frf | FRF | Frequency Response Function |
| dof | DoF | Degree of freedom |
| svd | SVD | Singular Value Decomposition |
| mif | MIF | Mode Indicator Functions |
Introduction ignore
In order to further improve the accuracy of the performance predictions, a model that better represents the micro-station dynamics is required. A multi-body model, consisting of several rigid bodies connected by kinematic constraints (i.e. joints), springs and damper elements, is a good candidate to model the micro-station.
Even though the inertia of each solid body can easily be estimated from its geometry and its material density, it is more difficult to properly estimate the stiffness and damping properties of the guiding elements connecting each solid body. The experimental modal analysis will be use to tune the model, and to verify that a multi-body model can represent accurately the dynamics of the micro-station.
The approach of tuning the multi-body model from measurements is illustrated in Figure ref:fig:modal_vibration_analysis_procedure. First, a response model is obtained, which corresponds to a set of frequency response functions computed from experimental measurements. From this response model, and modal model can be computed, which consists of two matrices: one containing the natural frequencies and damping factors of the considered modes, and another one describing the mode shapes. This modal model can then be used to tune the spatial model (i.e. the multi-body model), that is to say to tune the mass of the considering solid bodies, and the springs and dampers connecting the solid bodies.
\begin{tikzpicture}
\node[block, inner sep = 8pt, align=center] (1) {Description\\of structure};
\node[block, inner sep = 8pt, align=center, left=1.0 of 1] (2) {Vibration\\Modes};
\node[block, inner sep = 8pt, align=center, left=1.0 of 2] (3) {Response\\Levels};
\draw[<->] (1) -- (2);
\draw[<->] (2) -- (3);
\node[above] (labelt) at (1.north) {Spatial Model};
\node[] at (2|-labelt) {Modal Model};
\node[] at (3|-labelt) {Response Model};
\node[align = center, font=\tiny, below] (labelb) at (1.south) {Mass\\Stiffness\\Damping};
\node[align = center, font=\tiny] at (2|-labelb) {Natural Frequencies\\Mode Shapes\\};
\node[align = center, font=\tiny] at (3|-labelb) {Time Responses\\Frequency Responses\\};
\end{tikzpicture}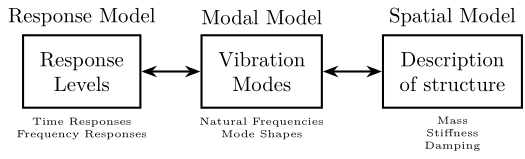
The measurement setup used to obtain the response model is presented in Section ref:sec:modal_meas_setup. This includes the instrumentation used (i.e. instrumented hammer, accelerometers and acquisition system), the test planing, and a first analysis of the obtained signals.
In Section ref:sec:modal_frf_processing, the obtained frequency response functions between the forces applied using the instrumented hammer and the various accelerometers fixed to the structure are computed. These measurements are projected at the center of mass of each considered solid body to ease the further use of the results. The solid body assumption is then verified, validating the use of the multi-body model.
Finally, the modal analysis is performed in Section ref:sec:modal_analysis. It shows how complex the micro-station dynamics is, and the necessity of the developed more complex multi-body model.
Measurement Setup
<<sec:modal_meas_setup>>
Introduction ignore
In order to perform an experimental modal analysis, a proper measurement setup is key. This include using appropriate instrumentation (presented in Section ref:ssec:modal_instrumentation) and properly preparing the structure to be measured (Section ref:ssec:modal_test_preparation). Then, the location of the measured motion (Section ref:ssec:modal_accelerometers) and the location of the hammer impacts (Section ref:ssec:modal_hammer_impacts) have to be chosen carefully. Obtained force and acceleration signals are shown in Section ref:ssec:modal_measured_signals, and the quality of the measured data is checked.
Used Instrumentation
<<ssec:modal_instrumentation>>
Three equipment are key to perform a good modal analysis. First, accelerometers are used to measure the response of the structure. Here, 3-axis accelerometers1 shown in figure ref:fig:modal_accelero_M393B05 are used. These accelerometers are glued to the micro-station using a thin layer of wax for best results cite:&ewins00_modal chapt. 3.5.7.



Then, an instrumented hammer2 (figure ref:fig:modal_instrumented_hammer) is used to apply forces to the structure in a controlled way. Tests have been conducted to determine the most suitable hammer tip (ranging from a metallic one to a soft plastic one). The softer tip has been found to give best results as it injects more energy in the low frequency range where the coherence was low, such that the overall coherence was improved.
Finally, an acquisition system3 (figure ref:fig:modal_oros) is used to acquire the injected force and the response accelerations in a synchronized way and with sufficiently low noise.
Structure Preparation and Test Planing
<<ssec:modal_test_preparation>>
In order to obtain meaningful results, the modal analysis of the micro-station in performed in-situ. To do so, all the micro-station stage controllers are turned "ON". This is especially important for stages for which the stiffness is provided by local feedback control, which is case for the air bearing spindle, and the translation stage. If these local feedback control were turned OFF, this would have resulted in very low frequency modes difficult to measure in practice, and this would also have lead to decoupled dynamics which would not be the case in practice.
The top part representing the active stabilization stage has been disassembled as the active stabilization stage and the sample will be added in the multi-body model afterwards.
To perform the modal-analysis from the measured responses, the $n \times n$ frequency response function matrix $\mathbf{H}$ needs to be measured, where $n$ is the considered number of degrees of freedom. The $H_{jk}$ element of this acrfull:frf matrix corresponds to the frequency response function from a force $F_k$ applied at acrfull:dof $k$ to the displacement of the structure $X_j$ at acrshort:dof $j$. Measuring this acrshort:frf matrix is very time consuming as it requires to make $n^2$ measurements. However thanks to the principle of reciprocity ($H_{jk} = H_{kj}$) and using the point measurement ($H_{jj}$), it is possible to reconstruct the full matrix by measuring only one column or one line of the matrix $\mathbf{H}$ cite:&ewins00_modal chapt. 5.2. Therefore, a minimum set of $n$ frequency response functions needs to be measured. This can be done either by measuring the response $X_{j}$ at a fixed acrshort:dof $j$ while applying forces $F_{i}$ for at all $n$ considered acrshort:dof, or by applying a force $F_{k}$ at a fixed acrshort:dof $k$ and measuring the response $X_{i}$ for all $n$ acrshort:dof.
It is however not advised to measure only one row or one column as one or more modes may be missed by an unfortunate choice of force or acceleration measured locations (for instance if the force is applied at a vibration node of a particular mode). In this modal-analysis, it is chosen to measure the response of the structure at all considered acrshort:dof, and to excite the structure at one location in three directions in order to have some redundancy and to make sure that all modes are properly energized.
Location of the Accelerometers
<<ssec:modal_accelerometers>>
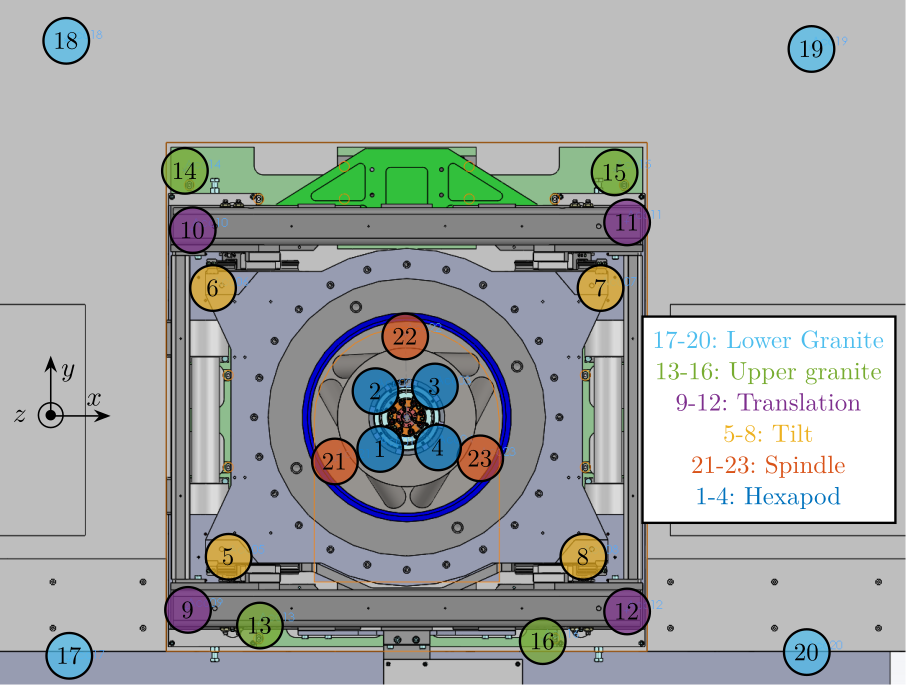
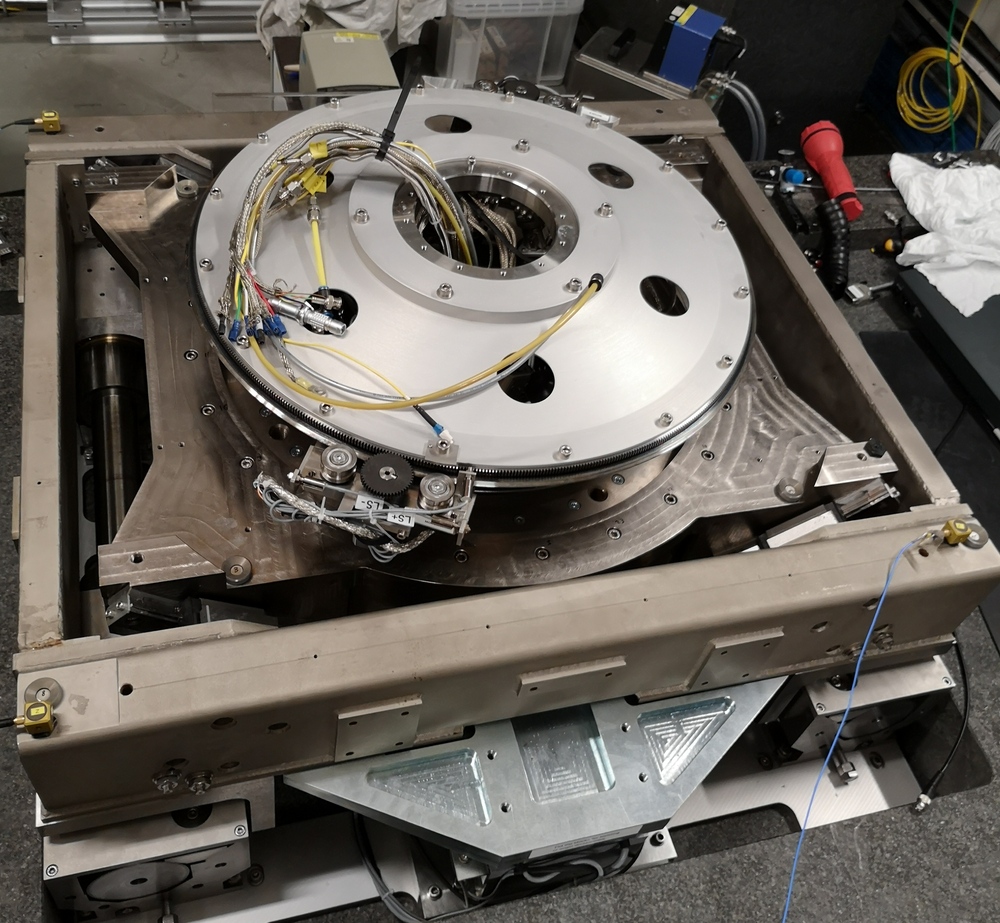
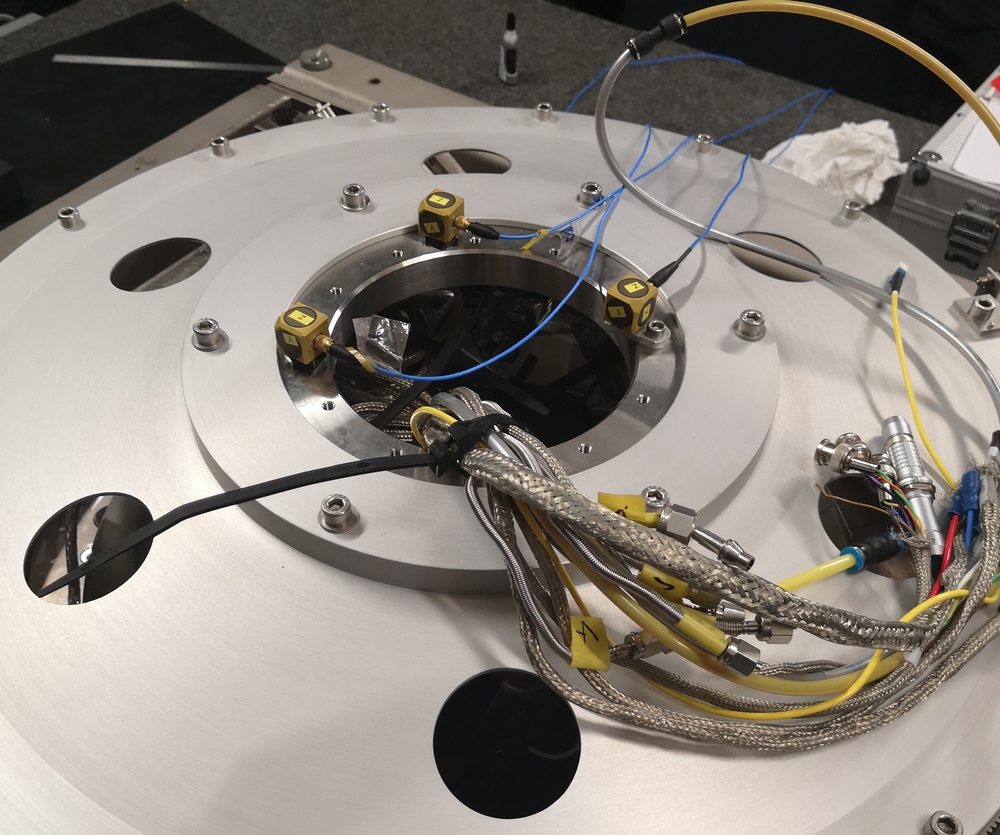
The location of the accelerometers fixed to the micro-station is essential as it defines where the dynamics is measured. A total of 23 accelerometers are fixed to the six key stages of the micro station: the lower and upper granites, the translation stage, the tilt stage, the spindle and the micro hexapod. The position of the accelerometers are visually shown on a CAD model in Figure ref:fig:modal_location_accelerometers and their precise locations with respect to a frame located at the point of interest are summarized in Table ref:tab:modal_position_accelerometers. Pictures of the accelerometers fixed to the translation stage and to the micro-hexapod are shown in Figure ref:fig:modal_accelerometer_pictures.
As all key stages of the micro-station are foreseen to behave as solid bodies, only 6 acrshort:dof can be considered per solid body. However, it was chosen to use four 3-axis accelerometers (i.e. 12 measured acrshort:dof) for each considered solid body to have some redundancy and to be able to verify the solid body assumption (see Section ref:ssec:modal_solid_body_assumption).
\hfill
| $x$ | $y$ | $z$ | |
|---|---|---|---|
| Low. Granite | -730 | -526 | -951 |
| Low. Granite | -735 | 814 | -951 |
| Low. Granite | 875 | 799 | -951 |
| Low. Granite | 865 | -506 | -951 |
| Up. Granite | -320 | -446 | -786 |
| Up. Granite | -480 | 534 | -786 |
| Up. Granite | 450 | 534 | -786 |
| Up. Granite | 295 | -481 | -786 |
| Translation | -475 | -414 | -427 |
| Translation | -465 | 407 | -427 |
| Translation | 475 | 424 | -427 |
| Translation | 475 | -419 | -427 |
| Tilt | -385 | -300 | -417 |
| Tilt | -420 | 280 | -417 |
| Tilt | 420 | 280 | -417 |
| Tilt | 380 | -300 | -417 |
| Spindle | -155 | -90 | -594 |
| Spindle | 0 | 180 | -594 |
| Spindle | 155 | -90 | -594 |
| Hexapod | -64 | -64 | -270 |
| Hexapod | -64 | 64 | -270 |
| Hexapod | 64 | 64 | -270 |
| Hexapod | 64 | -64 | -270 |
%% Load Accelerometer positions
acc_pos = readtable('mat/acc_pos.txt', 'ReadVariableNames', false);
acc_pos = table2array(acc_pos(:, 1:4));
[~, i] = sort(acc_pos(:, 1));
acc_pos = acc_pos(i, 2:4);Hammer Impacts
<<ssec:modal_hammer_impacts>>
The chosen location of the hammer impact corresponds to the location of accelerometer number $11$ fixed to the translation stage. It was chosen to match the location of one accelerometer, because a point measurement (i.e. a measurement of $H_{kk}$) is necessary to be able to reconstruct the full acrshort:frf matrix cite:ewins00_modal.
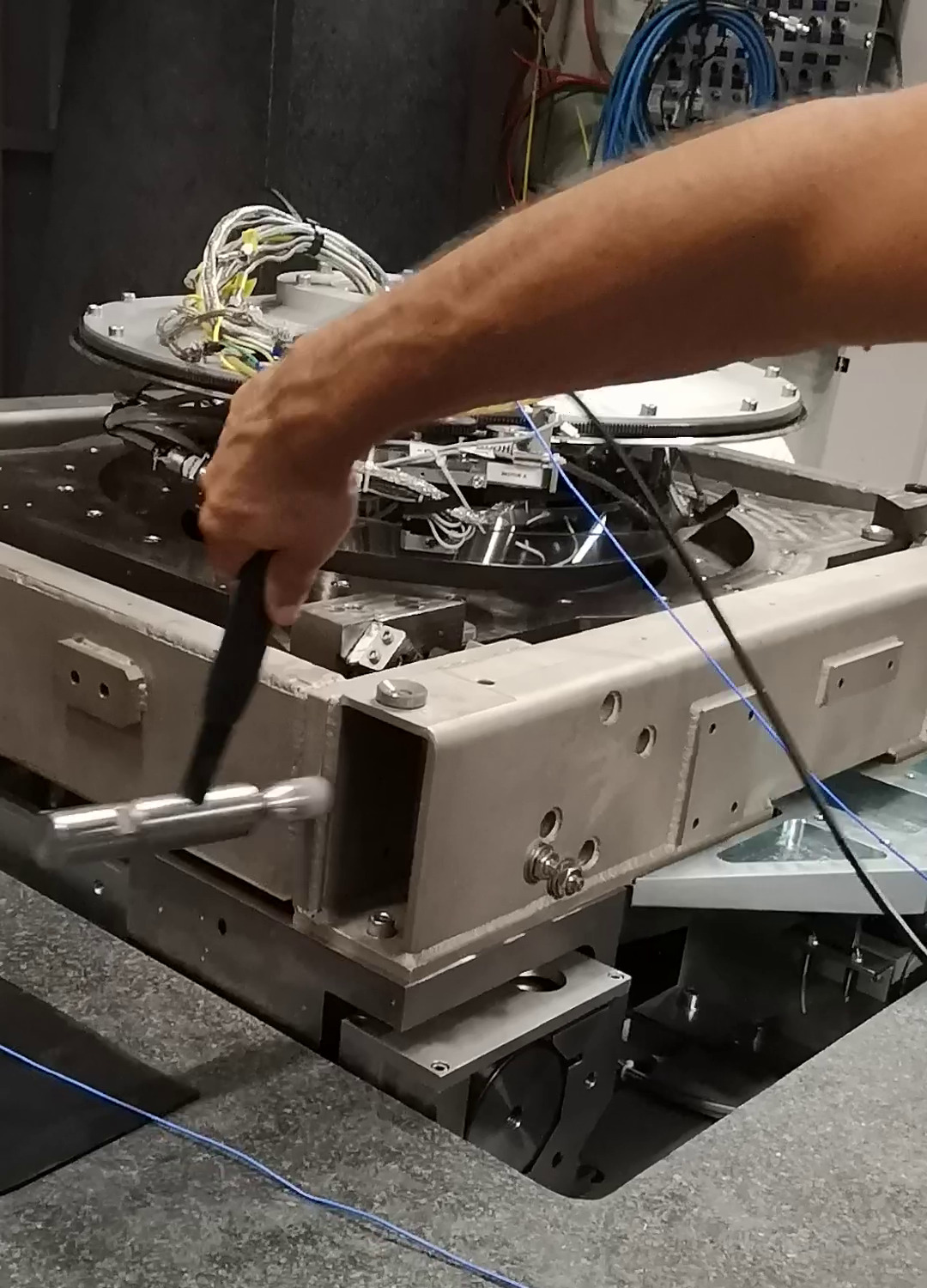
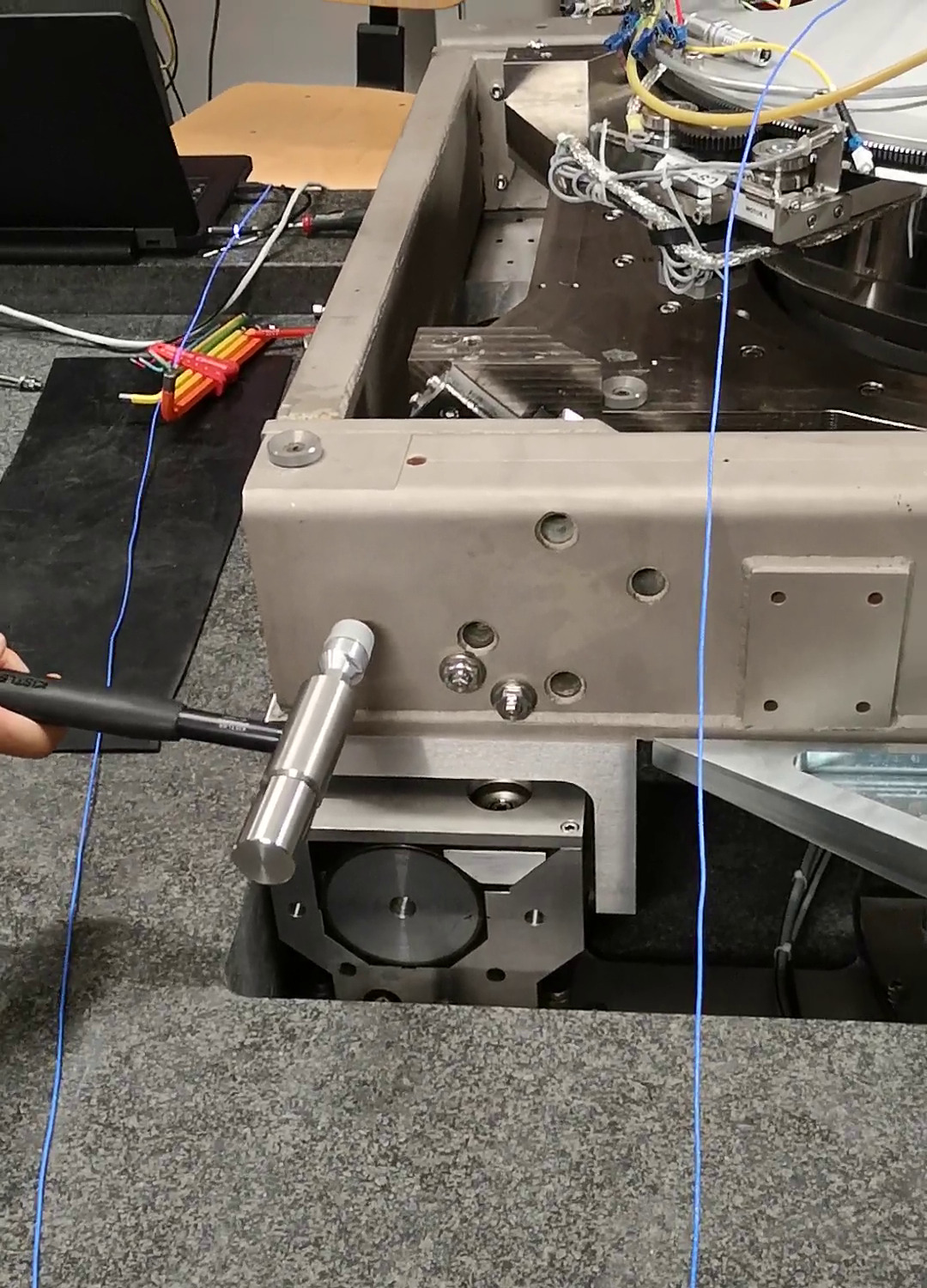
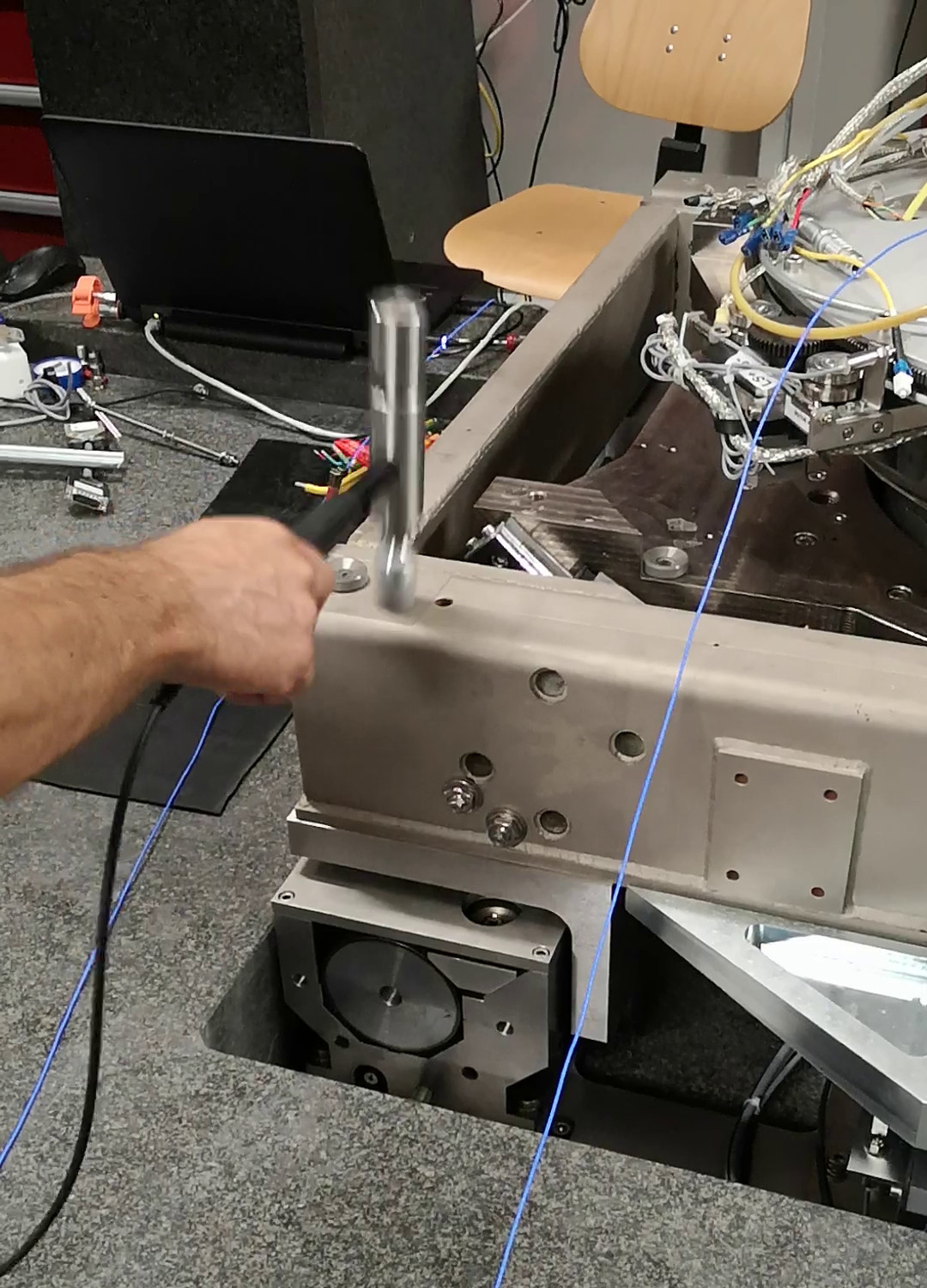
The impacts are performed in three directions, which are shown in figures ref:fig:modal_impact_x, ref:fig:modal_impact_y and ref:fig:modal_impact_z. This excitation point with the three considered directions allows to properly energize all the modes in the frequency band of interest and to provide good coherence for all the accelerometers as will be shown in the next section.
Force and Response signals
<<ssec:modal_measured_signals>>
The force sensor of the instrumented hammer and the accelerometers signals are shown in the time domain in Figure ref:fig:modal_raw_meas. Sharp "impacts" can be seen for the force sensor, indicating wide frequency band excitation. For the accelerometer, a much more complex signal can be observed, indicating complex dynamics.
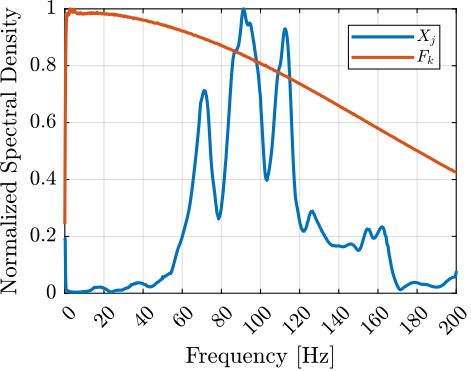
The "normalized" acrfull:asd of the two signals are computed and shown in Figure ref:fig:modal_asd_acc_force. Conclusions based on the time domain signals can be clearly seen in the frequency domain (wide frequency content for the force signal and complex dynamics for the accelerometer).
%% Load raw data
meas1_raw = load('mat/meas_raw_1.mat');
% Sampling Frequency [Hz]
Fs = 1/meas1_raw.Track1_X_Resolution;
% Time just before the impact occurs [s]
impacts = [5.937, 11.228, 16.681, 22.205, 27.350, 32.714, 38.115, 43.888, 50.407]-0.01;
% Time vector [s]
time = linspace(0, meas1_raw.Track1_X_Resolution*length(meas1_raw.Track1), length(meas1_raw.Track1));%% Frequency Analysis
Nfft = floor(5.0*Fs); % Number of frequency points
win = hanning(Nfft); % Windowing
Noverlap = floor(Nfft/2); % Overlap for frequency analysis
%% Comnpute the power spectral density of the force and acceleration
[pxx_force, f] = pwelch(meas1_raw.Track1, win, Noverlap, Nfft, Fs);
[pxx_acc, ~] = pwelch(meas1_raw.Track2, win, Noverlap, Nfft, Fs);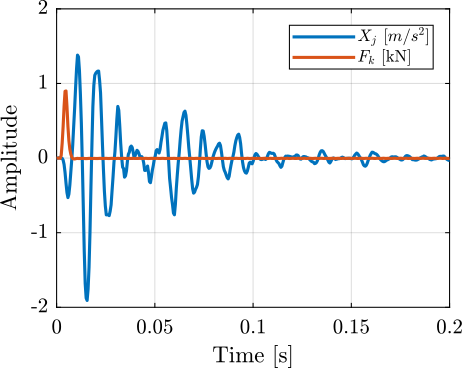
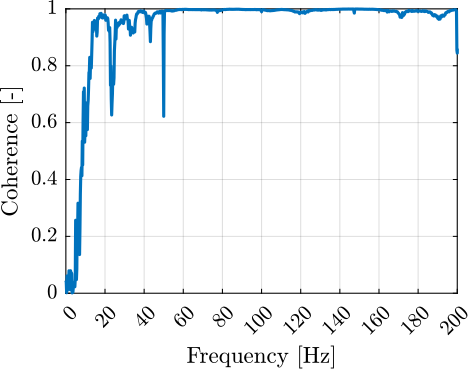
The frequency response function $H_{jk}$ from the applied force $F_{k}$ to the measured acceleration $X_j$ is then computed and shown Figure ref:fig:modal_frf_acc_force. The quality of the obtained data can be estimated using the coherence function, which is shown in Figure ref:fig:modal_coh_acc_force. Good coherence is obtained from $20\,\text{Hz}$ to $200\,\text{Hz}$ which corresponds to the frequency range of interest.
%% Compute the transfer function and Coherence
[G1, f] = tfestimate(meas1_raw.Track1, meas1_raw.Track2, win, Noverlap, Nfft, Fs);
[coh1, ~] = mscohere( meas1_raw.Track1, meas1_raw.Track2, win, Noverlap, Nfft, Fs);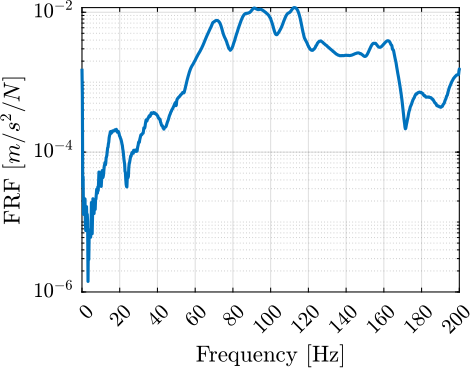
Frequency Analysis
<<sec:modal_frf_processing>>
Introduction ignore
All measurements where conducted and a $n \times p \times q$ acrlongpl:frf Matrix were computed with:
- $n = 69$: the number of output measured accelerations (23 3-axis accelerometers)
- $p = 3$: the number of input force excitations
- $q = 801$: the number of frequency points $\omega_{i}$
For each frequency point $\omega_{i}$, a 2D complex matrix is obtained that links the 3 force inputs to the 69 output accelerations eqref:eq:modal_frf_matrix_raw.
\begin{equation}\label{eq:modal_frf_matrix_raw}
\mathbf{H}(ω_i) = \begin{bmatrix}
\frac{D1_x}{F_x}(ω_i) & \frac{D1_x}{F_y}(ω_i) & \frac{D1_x}{F_z}(ω_i)
\frac{D1_y}{F_x}(ω_i) & \frac{D1_y}{F_y}(ω_i) & \frac{D1_y}{F_z}(ω_i)
\frac{D1_z}{F_x}(ω_i) & \frac{D1_z}{F_y}(ω_i) & \frac{D1_z}{F_z}(ω_i)
\frac{D2_x}{F_x}(ω_i) & \frac{D2_x}{F_y}(ω_i) & \frac{D2_x}{F_z}(ω_i)
\vdots & \vdots & \vdots
\frac{D23_z}{F_x}(ω_i) & \frac{D23_z}{F_y}(ω_i) & \frac{D23_z}{F_z}(ω_i) \\
\end{bmatrix}
\end{equation}
However, for the multi-body model being developed, only 6 solid bodies are considered, namely: the bottom granite, the top granite, the translation stage, the tilt stage, the spindle and the hexapod. Therefore, only $6 \times 6 = 36$ degrees of freedom are of interest. The objective in this section is therefore to process the Frequency Response Matrix to reduce the number of measured acrshort:dof from 69 to 36.
The coordinate transformation from accelerometers acrshort:dof to the solid body 6 acrshortpl:dof (three translations and three rotations) is performed in Section ref:ssec:modal_acc_to_solid_dof. The $69 \times 3 \times 801$ frequency response matrix is then reduced to a $36 \times 3 \times 801$ frequency response matrix where the motion of each solid body is expressed with respect to its center of mass.
To validate this reduction of acrshort:dof and the solid body assumption, the frequency response function at the accelerometer location are recomputed from the reduced frequency response matrix and are compared with the initial measurements in Section ref:ssec:modal_solid_body_assumption.
From accelerometer DOFs to solid body DOFs
<<ssec:modal_acc_to_solid_dof>>
Let's consider the schematic shown in Figure ref:fig:modal_local_to_global_coordinates where the motion of a solid body is measured at 4 distinct locations (in $x$, $y$ and $z$ directions). The goal here is to link these $4 \times 3 = 12$ measurements to the 6 acrshort:dof of the solid body expressed in the frame $\{O\}$.
\newcommand\irregularcircle[2]{% radius, irregularity
\pgfextra {\pgfmathsetmacro\len{(#1)+rand*(#2)}}
+(0:\len pt)
\foreach \a in {10,20,...,350}{
\pgfextra {\pgfmathsetmacro\len{(#1)+rand*(#2)}}
-- +(\a:\len pt)
} -- cycle
}
\begin{tikzpicture}
\draw[rounded corners=1mm, fill=blue!30!white] (0, 0) \irregularcircle{3cm}{1mm};
\node[] (origin) at (4, -1) {$\bullet$};
\begin{scope}[shift={(origin)}]
\def\axissize{0.8cm}
\draw[->] (0, 0) -- ++(\axissize, 0) node[above left]{$x$};
\draw[->] (0, 0) -- ++(0, \axissize) node[below right]{$y$};
\draw[fill, color=black] (0, 0) circle (0.05*\axissize);
\node[draw, circle, inner sep=0pt, minimum size=0.4*\axissize, label=left:$z$] (yaxis) at (0, 0){};
\node[below right] at (0, 0){$\{O\}$};
\end{scope}
\coordinate[] (p1) at (-1.5, -1.5);
\coordinate[] (p2) at (-1.5, 1.5);
\coordinate[] (p3) at ( 1.5, 1.5);
\coordinate[] (p4) at ( 1.5, -1.5);
\draw[->] (p1)node[]{$\bullet$}node[above]{$\vec{p}_1$} -- ++( 1 , 0.5)node[right]{$\delta \vec{p}_1$};
\draw[->] (p2)node[]{$\bullet$}node[above]{$\vec{p}_2$} -- ++(-0.5, 1 )node[right]{$\delta \vec{p}_2$};
\draw[->] (p3)node[]{$\bullet$}node[above]{$\vec{p}_3$} -- ++( 1 , 0.5)node[right]{$\delta \vec{p}_3$};
\draw[->] (p4)node[]{$\bullet$}node[above]{$\vec{p}_4$} -- ++( 0.5, 1 )node[right]{$\delta \vec{p}_4$};
\end{tikzpicture}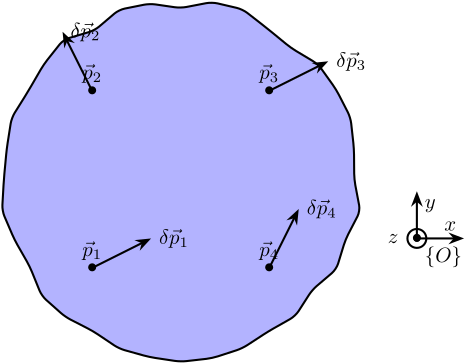
Writing Eq. eqref:eq:modal_p1_p2_motion for the four displacement sensors in a matrix form gives eqref:eq:modal_cart_to_acc.
\begin{equation}\label{eq:modal_cart_to_acc} ≤ft[\begin{array}{ccc|ccc} 1 & 0 & 0 & 0 & p_{1z} & -p_{1y} \\ 0 & 1 & 0 & -p_{1z} & 0 & p_{1x} \\ 0 & 0 & 1 & p_{1y} & -p_{1x} & 0 \\ \hline & \vdots & & & \vdots & \\ \hline 1 & 0 & 0 & 0 & p_{4z} & -p_{4y} \\ 0 & 1 & 0 & -p_{4z} & 0 & p_{4x} \\ 0 & 0 & 1 & p_{4y} & -p_{4x} & 0 \end{array}\right] \left[\begin{array}{c} \delta p_x \\ \delta p_y \\ \delta p_z \\ \hline \delta\Omega_x \\ \delta\Omega_y \\ \delta\Omega_z \end{array}\right] = \left[\begin{array}{c} \delta p_{1x} \\ \delta p_{1y} \\ \delta p_{1z} \\\hline \vdots \\\hline \delta p_{4x} \\ \delta p_{4y} \\ \delta p_{4z} \end{array}\right] ≤ft[\begin{array}{c} \delta p_x \\ \delta p_y \\ \delta p_z \\ \hline \delta\Omega_x \\ \delta\Omega_y \\ \delta\Omega_z \end{array}\right] = \left[\begin{array}{c} \delta p_{1x} \\ \delta p_{1y} \\ \delta p_{1z} \\\hline \vdots \\\hline \delta p_{4x} \\ \delta p_{4y} \\ \delta p_{4z} \end{array}\right] = ≤ft[\begin{array}{c} \delta p_{1x} \\ \delta p_{1y} \\ \delta p_{1z} \\\hline \vdots \\\hline \delta p_{4x} \\ \delta p_{4y} \\ \delta p_{4z} \end{array}\right]
\end{equation}
Provided that the four sensors are properly located, the system of equation eqref:eq:modal_cart_to_acc can be solved by matrix inversion. The motion of the solid body expressed in a chosen frame $\{O\}$ can be determined using equation eqref:eq:modal_determine_global_disp. Note that this matrix inversion is equivalent to resolving a mean square problem. Therefore, having more accelerometers permits to have a better approximation of the motion of the solid body.
\begin{equation} \left[\begin{array}{c} \delta p_x \\ \delta p_y \\ \delta p_z \\ \hline \delta\Omega_x \\ \delta\Omega_y \\ \delta\Omega_z \end{array}\right] = \left[\begin{array}{ccc|ccc} 1 & 0 & 0 & 0 & p_{1z} & -p_{1y} \\ 0 & 1 & 0 & -p_{1z} & 0 & p_{1x} \\ 0 & 0 & 1 & p_{1y} & -p_{1x} & 0 \\ \hline & \vdots & & & \vdots & \\ \hline 1 & 0 & 0 & 0 & p_{4z} & -p_{4y} \\ 0 & 1 & 0 & -p_{4z} & 0 & p_{4x} \\ 0 & 0 & 1 & p_{4y} & -p_{4x} & 0 \end{array}\right]^{-1} \left[\begin{array}{c} \delta p_{1x} \\ \delta p_{1y} \\ \delta p_{1z} \\\hline \vdots \\\hline \delta p_{4x} \\ \delta p_{4y} \\ \delta p_{4z} \end{array}\right] \label{eq:modal_determine_global_disp} \end{equation}From the CAD model, the position of the center of mass of each considered solid body is computed (see Table ref:tab:modal_com_solid_bodies). Then, the position of each accelerometer with respect to the center of mass of the corresponding solid body can easily be derived.
%% Load frequency response matrix
load('frf_matrix.mat', 'freqs', 'frf');
%% Load Accelerometer positions
acc_pos = readtable('mat/acc_pos.txt', 'ReadVariableNames', false);
acc_pos = table2array(acc_pos(:, 1:4));
[~, i] = sort(acc_pos(:, 1));
acc_pos = acc_pos(i, 2:4);%% Accelerometers ID connected to each solid body
solids = {};
solids.gbot = [17, 18, 19, 20]; % bottom granite
solids.gtop = [13, 14, 15, 16]; % top granite
solids.ty = [9, 10, 11, 12]; % Ty stage
solids.ry = [5, 6, 7, 8]; % Ry stage
solids.rz = [21, 22, 23]; % Rz stage
solids.hexa = [1, 2, 3, 4]; % Hexapod
% Names of the solid bodies
solid_names = fields(solids);%% Save the acceleromter positions are well as the solid bodies
save('mat/geometry.mat', 'solids', 'solid_names', 'acc_pos');%% Save the acceleromter positions are well as the solid bodies
save('matlab/mat/geometry.mat', 'solids', 'solid_names', 'acc_pos');%% Extract the CoM of considered solid bodies
model_com = reshape(table2array(readtable('mat/model_solidworks_com.txt', 'ReadVariableNames', false)), [3, 6]);| $X$ [mm] | $Y$ [mm] | $Z$ [mm] | |
|---|---|---|---|
| Bottom Granite | 45 | 144 | -1251 |
| Top granite | 52 | 258 | -778 |
| Translation stage | 0 | 14 | -600 |
| Tilt Stage | 0 | -5 | -628 |
| Spindle | 0 | 0 | -580 |
| Hexapod | -4 | 6 | -319 |
Using eqref:eq:modal_determine_global_disp, the frequency response matrix $\mathbf{H}_\text{CoM}$ eqref:eq:modal_frf_matrix_com expressing the response at the center of mass of each solid body $D_i$ ($i$ from $1$ to $6$ for the $6$ considered solid bodies) can be computed from the initial acrshort:frf matrix $\mathbf{H}$.
\begin{equation}\label{eq:modal_frf_matrix_com}
\mathbf{H}_\text{CoM}(ω_i) = \begin{bmatrix}
\frac{D1,T_x}{F_x}(ω_i) & \frac{D1,T_x}{F_y}(ω_i) & \frac{D1,T_x}{F_z}(ω_i)
\frac{D1,T_y}{F_x}(ω_i) & \frac{D1,T_y}{F_y}(ω_i) & \frac{D1,T_y}{F_z}(ω_i)
\frac{D1,T_z}{F_x}(ω_i) & \frac{D1,T_z}{F_y}(ω_i) & \frac{D1,T_z}{F_z}(ω_i)
\frac{D1,R_x}{F_x}(ω_i) & \frac{D1,R_x}{F_y}(ω_i) & \frac{D1,R_x}{F_z}(ω_i)
\frac{D1,R_y}{F_x}(ω_i) & \frac{D1,R_y}{F_y}(ω_i) & \frac{D1,R_y}{F_z}(ω_i)
\frac{D1,R_z}{F_x}(ω_i) & \frac{D1,R_z}{F_y}(ω_i) & \frac{D1,R_z}{F_z}(ω_i)
\frac{D2,T_x}{F_x}(ω_i) & \frac{D2,T_x}{F_y}(ω_i) & \frac{D2,T_x}{F_z}(ω_i)
\vdots & \vdots & \vdots
\frac{D6,R_z}{F_x}(ω_i) & \frac{D6,R_z}{F_y}(ω_i) & \frac{D6,R_z}{F_z}(ω_i)
\end{bmatrix}
\end{equation}
%% Frequency Response Matrix - Response expressed at the CoM of the solid bodies
frfs_CoM = zeros(length(solid_names)*6, 3, 801);
for solid_i = 1:length(solid_names)
% Number of accelerometers fixed to this solid body
solids_i = solids.(solid_names{solid_i});
% "Jacobian" matrix to go from accelerometer frame to CoM frame
A = zeros(3*length(solids_i), 6);
for i = 1:length(solids_i)
acc_i = solids_i(i);
acc_pos_com = acc_pos(acc_i, :).' - model_com(:, solid_i);
A(3*(i-1)+1:3*i, 1:3) = eye(3);
A(3*(i-1)+1:3*i, 4:6) = [ 0 acc_pos_com(3) -acc_pos_com(2) ;
-acc_pos_com(3) 0 acc_pos_com(1) ;
acc_pos_com(2) -acc_pos_com(1) 0];
end
for exc_dir = 1:3
frfs_CoM((solid_i-1)*6+1:solid_i*6, exc_dir, :) = A\squeeze(frf((solids_i(1)-1)*3+1:solids_i(end)*3, exc_dir, :));
end
end%% Save the computed FRF at the CoM
save('mat/frf_com.mat', 'frfs_CoM');%% Save the computed FRF at the CoM
save('matlab/mat/frf_com.mat', 'frfs_CoM');Verification of solid body assumption
<<ssec:modal_solid_body_assumption>>
From the response of one solid body along its 6 acrshortpl:dof (i.e. from $\mathbf{H}_{\text{CoM}}$), and using equation eqref:eq:modal_cart_to_acc, it is possible to compute the response of the same solid body at any considered position. In particular, the response at the location of the four accelerometers can be computed. Comparing the computed response of a particular accelerometer from $\mathbf{H}_{\text{CoM}}$ with the original measurements $\mathbf{H}$ is use to check if solid body assumption is correct in the frequency band of interest.
frfs_A = zeros(size(frf));
% For each excitation direction
for exc_dir = 1:3
% For each solid
for solid_i = 1:length(solid_names)
v0 = squeeze(frfs_CoM((solid_i-1)*6+1:(solid_i-1)*6+3, exc_dir, :));
W0 = squeeze(frfs_CoM((solid_i-1)*6+4:(solid_i-1)*6+6, exc_dir, :));
% For each accelerometer attached to the current solid
for acc_i = solids.(solid_names{solid_i})
% We get the position of the accelerometer expressed in frame O
pos = acc_pos(acc_i, :).' - model_com(:, solid_i);
% pos = acc_pos(acc_i, :).';
posX = [0 pos(3) -pos(2); -pos(3) 0 pos(1) ; pos(2) -pos(1) 0];
frfs_A(3*(acc_i-1)+1:3*(acc_i-1)+3, exc_dir, :) = v0 + posX*W0;
end
end
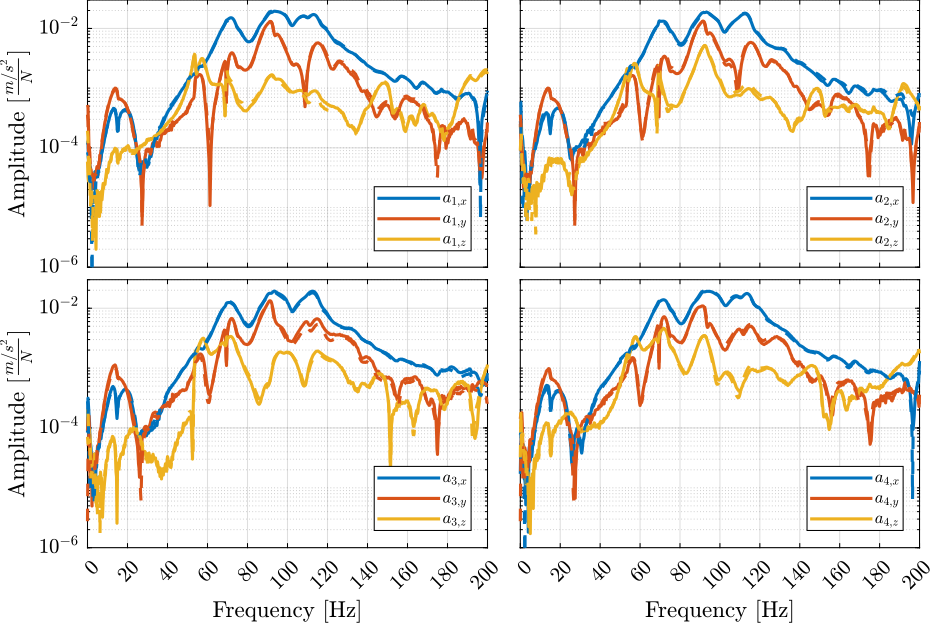
endThe comparison is made for the 4 accelerometers fixed to the micro-hexapod (Figure ref:fig:modal_comp_acc_solid_body_frf). The original frequency response functions and the ones computed from the CoM responses are well matching in the frequency range of interested. Similar results are obtained for the other solid bodies, indicating that the solid body assumption is valid, and that a multi-body model can be used to represent the dynamics of the micro-station. This also validates the reduction of the number of degrees of freedom from 69 (23 accelerometers with each 3 acrshort:dof) to 36 (6 solid bodies with 6 acrshort:dof).
Modal Analysis
<<sec:modal_analysis>>
Introduction ignore
The goal here is to extract the modal parameters describing the modes of station being studied, namely the natural frequencies and the modal damping (i.e. the eigenvalues) and the mode shapes (.i.e. the eigenvectors). This is done from the acrshort:frf matrix previously extracted from the measurements.
In order to perform the modal parameter extraction, the order of the modal model needs to be estimated (i.e. the number of modes in the frequency band of interest). This is done using the acrfull:mif in section ref:ssec:modal_number_of_modes.
In section ref:ssec:modal_parameter_extraction, the modal parameter extraction is performed. Graphical display of the mode shapes can be computed from the modal model, which is quite quite useful to have a physical interpretation of the modes.
To validate the quality of the modal model, the full acrshort:frf matrix is computed from the modal model and compared with the initial measured acrshort:frf (section ref:ssec:modal_model_validity).
Determine the number of modes
<<ssec:modal_number_of_modes>> The acrshort:mif is here applied to the $n\times p$ acrshort:frf matrix where $n$ is a relatively large number of measurement DOFs (here $n=69$) and $p$ is the number of excitation DOFs (here $p=3$).
The complex modal indication function is defined in equation eqref:eq:modal_cmif where $\Sigma$ is obtained from a acrshort:svd of the acrshort:frf matrix eqref:eq:modal_svd. \begin{equation} \label{eq:modal_cmif} [CMIF(ω)]p× p = [Σ(ω)]p× n^T [Σ(ω)]n× p
\end{equation}
\begin{equation} \label{eq:modal_svd} [H(ω)]n× p = [U(ω)]n× n [Σ(ω)]n× p [V(ω)]p× p^H
\end{equation}
The acrshort:mif therefore yields to $p$ values that are also frequency dependent. A peak in the acrshort:mif plot indicates the presence of a mode. Repeated modes can also be detected by multiple singular values are having peaks at the same frequency. The obtained acrshort:mif is shown on Figure ref:fig:modal_indication_function. A total of 16 modes are found between 0 and $200\,\text{Hz}$. The obtained natural frequencies and associated modal damping are summarized in Table ref:tab:modal_obtained_modes_freqs_damps.
%% Load frequency response matrix
load('frf_matrix.mat', 'freqs', 'frf');
%% Computation of the modal indication function
MIF = zeros(size(frf, 2), size(frf, 2), size(frf, 3));
for i = 1:length(freqs)
[~,S,~] = svd(frf(:, :, i));
MIF(:, :, i) = S'*S;
end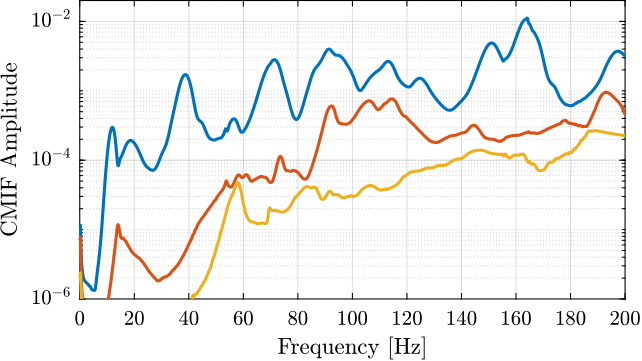
\hfill
| Mode | Freq. [Hz] | Damp. [%] |
|---|---|---|
| 1 | 11.9 | 12.2 |
| 2 | 18.6 | 11.7 |
| 3 | 37.8 | 6.2 |
| 4 | 39.1 | 2.8 |
| 5 | 56.3 | 2.8 |
| 6 | 69.8 | 4.3 |
| 7 | 72.5 | 1.3 |
| 8 | 84.8 | 3.7 |
| 9 | 91.3 | 2.9 |
| 10 | 105.5 | 3.2 |
| 11 | 106.6 | 1.6 |
| 12 | 112.7 | 3.1 |
| 13 | 124.2 | 2.8 |
| 14 | 145.3 | 1.3 |
| 15 | 150.5 | 2.4 |
| 16 | 165.4 | 1.4 |
Modal parameter extraction
<<ssec:modal_parameter_extraction>>
The modal identification generally consists of curve-fitting a theoretical expression for an individual acrshort:frf to the actual measured data. However, there are multiple level of complexity, from fitting of a single resonance, a complete curve encompassing several resonances and working on a set of many acrshort:frf plots all obtained from the same structure.
Here, the last method is used as it gives a unique and consistent model as direct output. It takes into account the fact the the properties of all the individual curves are related by being from the same structure: all FRF plots on a given structure should indicate the same values for the natural frequencies and damping factor of each mode.
From the obtained modal parameters, the mode shapes are computed and can be displayed in the form of animations. Three mode shapes are shown in Figure ref:fig:modal_mode_animations.
These animations are quite useful to easily get a better understanding of the system. For instance, the mode shape of the first mode at 11Hz (figure ref:fig:modal_mode1_animation) indicates that there is an issue with the lower granite. It turns out that four Airloc Levelers are used to level the lower granite (figure ref:fig:modal_airloc). These are difficult to tune so that the granite is well supported by four of them and not "wobbly" on just two of them.




The modal parameter extraction is made using a proprietary software4. For each mode $r$ (from $1$ to the number of considered modes $m=16$), it outputs the frequency $\omega_r$, the damping ratio $\xi_r$, the eigenvectors $\{\phi_{r}\}$ (vector of complex numbers with a size equal to the number of measured acrshort:dof $n=69$, see equation eqref:eq:modal_eigenvector) and a scaling factor $a_r$.
\begin{equation}\label{eq:modal_eigenvector} \{ɸ_i\} = \begin{Bmatrix} \phi_{i, 1_x} & \phi_{i, 1_y} & \phi_{i, 1_z} & \phi_{i, 2_x} & \dots & \phi_{i, 23_z} \end{Bmatrix}^T
\end{equation}
The eigenvalues $s_r$ and $s_r^*$ can then be computed from eqref:eq:modal_eigenvalues.
\begin{equation}\label{eq:modal_eigenvalues} s_r = ω_r (-ξ_r + i \sqrt{1 - ξ_r^2}), \quad s_r^* = ω_r (-ξ_r - i \sqrt{1 - ξ_r^2})
\end{equation}
Verify the validity of the Modal Model
<<ssec:modal_model_validity>>
In order to check the validity of the modal model, the complete $n \times n$ acrshort:frf matrix $\mathbf{H}_{\text{syn}}$ is first synthesized from the modal parameters. Then, the elements of this acrshort:frf matrix $\mathbf{H}_{\text{syn}}$ that were already measured can be compared with the measured elements $\mathbf{H}$. New measurements may be performed to compare with elements of the synthesized acrshort:frf matrix that were not initialized measured to build the modal model.
In order to synthesize the full acrshort:frf matrix, the eigenvectors $\phi_r$ are first reorganized in a matrix from as shown in equation eqref:eq:modal_eigvector_matrix. \begin{equation}\label{eq:modal_eigvector_matrix} Φ = \begin{bmatrix} & & & & &\\ \phi_1 & \dots & \phi_N & \phi_1^* & \dots & \phi_N^* \\ & & & & & \end{bmatrix}n × 2m
\end{equation}
The full acrshort:frf matrix $\mathbf{H}_{\text{syn}}$ can be synthesize using eqref:eq:modal_synthesized_frf.
\begin{equation}\label{eq:modal_synthesized_frf} [\mathbf{H}_{\text{syn}}(ω)]n× n = [Φ]n×2m [\mathbf{H}_{\text{mod}}(ω)]2m×2m [Φ]2m× n^T
\end{equation}
With $\mathbf{H}_{\text{mod}}(\omega)$ a diagonal matrix representing the response of the different modes eqref:eq:modal_modal_resp. \begin{equation}\label{eq:modal_modal_resp} \mathbf{H}_{\text{mod}}(ω) = \text{diag}≤ft(\frac{1}{a_1 (jω - s_1)},\ …,\ \frac{1}{a_m (jω - s_m)}, \frac{1}{a_1^* (jω - s_1^*)},\ …,\ \frac{1}{a_m^* (jω - s_m^*)} \right)2m× 2m
\end{equation}
%% Load modal parameters
shapes_m = readtable('mat/mode_shapes.txt', 'ReadVariableNames', false); % [Sign / Real / Imag]
freqs_m = table2array(readtable('mat/mode_freqs.txt', 'ReadVariableNames', false)); % in [Hz]
damps_m = table2array(readtable('mat/mode_damps.txt', 'ReadVariableNames', false)); % in [%]
modal_a = table2array(readtable('mat/mode_modal_a.txt', 'ReadVariableNames', false)); % [Real / Imag]
modal_b = table2array(readtable('mat/mode_modal_b.txt', 'ReadVariableNames', false)); % [Real / Imag]
%% Guess the number of modes identified from the length of the imported data.
acc_n = 23; % Number of accelerometers
dir_n = 3; % Number of directions
dirs = 'XYZ';
mod_n = size(shapes_m,1)/acc_n/dir_n; % Number of modes
%% Mode shapes are split into 3 parts (direction plus sign, real part and imaginary part)
% we aggregate them into one array of complex numbers
T_sign = table2array(shapes_m(:, 1));
T_real = table2array(shapes_m(:, 2));
T_imag = table2array(shapes_m(:, 3));
mode_shapes = zeros(mod_n, dir_n, acc_n);
for mod_i = 1:mod_n
for acc_i = 1:acc_n
% Get the correct section of the signs
T = T_sign(acc_n*dir_n*(mod_i-1)+1:acc_n*dir_n*mod_i);
for dir_i = 1:dir_n
% Get the line corresponding to the sensor
i = find(contains(T, sprintf('%i%s',acc_i, dirs(dir_i))), 1, 'first')+acc_n*dir_n*(mod_i-1);
mode_shapes(mod_i, dir_i, acc_i) = str2num([T_sign{i}(end-1), '1'])*complex(T_real(i),T_imag(i));
end
end
end
%% Create the eigenvalue and eigenvector matrices
eigen_val_M = diag(2*pi*freqs_m.*(-damps_m/100 + j*sqrt(1 - (damps_m/100).^2))); % Lambda = diagonal matrix
eigen_vec_M = reshape(mode_shapes, [mod_n, acc_n*dir_n]).'; % Phi, vecnorm(eigen_vec_M) = 1
% Add complex conjugate eigenvalues and eigenvectors
eigen_val_ext_M = blkdiag(eigen_val_M, conj(eigen_val_M));
eigen_vec_ext_M = [eigen_vec_M, conj(eigen_vec_M)];
%% "Modal A" and "Modal B" matrices
modal_a_M = diag(complex(modal_a(:, 1), modal_a(:, 2)));
modal_b_M = diag(complex(modal_b(:, 1), modal_b(:, 2)));
modal_a_ext_M = blkdiag(modal_a_M, conj(modal_a_M));
modal_b_ext_M = blkdiag(modal_b_M, conj(modal_b_M));
%% Synthesize the full FRF matrix from the modal model
Hsyn = zeros(acc_n*dir_n, acc_n*dir_n, length(freqs));
for i = 1:length(freqs)
Hsyn(:, :, i) = eigen_vec_ext_M*diag(1./(diag(modal_a_ext_M).*(j*2*pi*freqs(i) - diag(eigen_val_ext_M))))*eigen_vec_ext_M.';
end
%% Derivate two times to to have the acceleration response
for i = 1:size(Hsyn, 1)
Hsyn(i, :, :) = squeeze(Hsyn(i, :, :)).*(j*2*pi*freqs).^2;
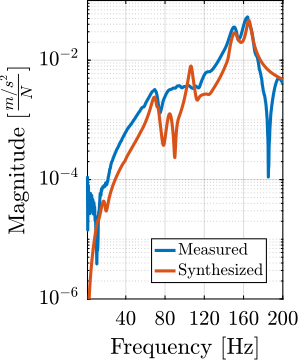
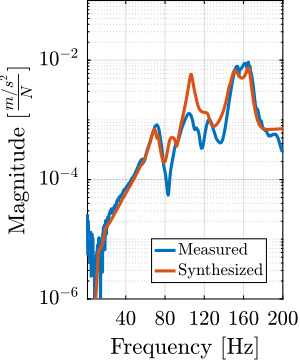
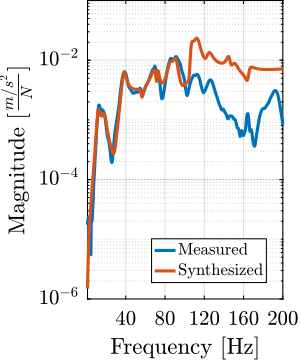
endThe comparison between the original measured frequency response function and the synthesized one from the modal model is done in Figure ref:fig:modal_comp_acc_frf_modal. The match is rather good considering the complex dynamics and the different directions considered.
Conclusion
<<sec:modal_conclusion>>
In this study, a modal analysis of the micro-station was performed. Thanks to adequate choice of instrumentation and proper set of measurements, high quality frequency response functions could be obtained. As could be expected from a heavy stacked stages architecture, the obtained frequency response functions indicate that the dynamics of the micro-station is complex. It shows lots of coupling between stages and different directions, as well as many modes with various damping properties.
By measuring 12 degrees of freedom on each "stage", it could be verified that in the frequency range of interest, each stage is behaving as a rigid body. This confirms that a solid-body model can be used to properly model the micro-station.
Even though lots of efforts were put in the proper modal analysis of the micro-station, it was stiff very difficult to obtain an accurate modal model. Yet, the measurements will be quite useful when tuning the parameters of the multi-body model.