16 KiB
#+TITLE:Vibrations induced by simultaneous scans of the translation stage and of the slip-ring
Measurement description
Setup ignore
Setup: All the stages are OFF except the translation stage and the Slip-Ring.
Each of the signal is amplified by voltage amplifiers with the following settings:
- Gain: 40dB
- AC/DC option: AC
- Low pass filter: 1kHz
The slip-ring is rotating at 60rpm. At the same time, scans with the translation stage are done at 1Hz with an amplitude of 600000cnt (= 3mm).
Two geophones are used to measure the motion in the vertical direction of the marble and of the sample.
Goal ignore
Goal:
- The goal is to estimate the vibrations induced by the simultaneous scans of the spindle (here the slip-ring is used as the spindle is not fully functional yet) and of the translation stage
Measurements ignore
Measurements:
Three measurements are done:
| Measurement File | Description |
|---|---|
mat/data_050.mat |
Slip-Ring at 1Hz, Ty OFF |
mat/data_051.mat |
Slip-Ring at 1Hz, Ty ON (The current and cnt error of Ty is also registered) |
mat/data_052.mat |
Slip-Ring at 1Hz, Ty 1Hz 600000cnt |
Each of the measurement mat file contains one data array with 3 columns:
| Column number | Description |
|---|---|
| 1 | Geophone on the marble |
| 2 | Geophone at the sample location |
| 3 | Time |
Data Analysis
<<sec:disturbance_ty_sr>>
ZIP file containing the data and matlab files ignore
All the files (data and Matlab scripts) are accessible here.
Load data
ty_of = load('mat/data_050.mat', 'data'); ty_of = ty_of.data;
ty_on = load('mat/data_051.mat', 'data'); ty_on = ty_on.data;
ty_1h = load('mat/data_052.mat', 'data'); ty_1h = ty_1h.data;Voltage to Velocity
We convert the measured voltage to velocity using the function voltageToVelocityL22 (accessible here).
gain = 40; % [dB]
ty_of(:, 1) = voltageToVelocityL22(ty_of(:, 1), ty_of(:, 3), gain);
ty_on(:, 1) = voltageToVelocityL22(ty_on(:, 1), ty_on(:, 3), gain);
ty_1h(:, 1) = voltageToVelocityL22(ty_1h(:, 1), ty_1h(:, 3), gain);
ty_of(:, 2) = voltageToVelocityL22(ty_of(:, 2), ty_of(:, 3), gain);
ty_on(:, 2) = voltageToVelocityL22(ty_on(:, 2), ty_on(:, 3), gain);
ty_1h(:, 2) = voltageToVelocityL22(ty_1h(:, 2), ty_1h(:, 3), gain);Time domain plots
We plot the measured velocity of the marble (figure fig:ty_marble_time), sample (figure fig:ty_sample_time) and the relative velocity of the sample with respect to the marble (figure fig:ty_relative_time).
We also integrate the relative velocity to obtain the relative displacement (figure fig:ty_relative_disp_time).
figure;
hold on;
plot(ty_1h(:, 3), ty_1h(:, 1), 'DisplayName', 'Marble - Ty 1Hz');
plot(ty_on(:, 3), ty_on(:, 1), 'DisplayName', 'Marble - Ty ON');
plot(ty_of(:, 3), ty_of(:, 1), 'DisplayName', 'Marble - Ty OFF');
hold off;
xlabel('Time [s]'); ylabel('Velocity [m/s]');
xlim([0, 2]);
legend('Location', 'southwest'); <<plt-matlab>>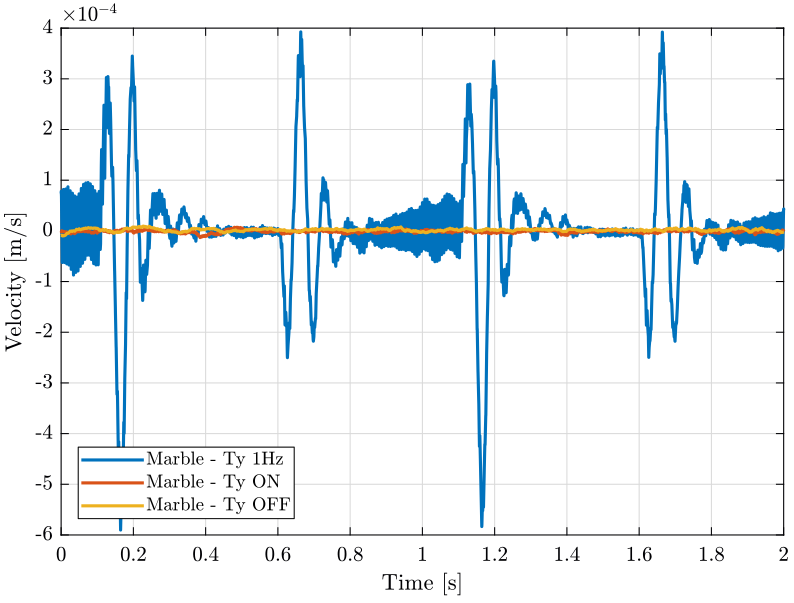
figure;
hold on;
plot(ty_1h(:, 3), ty_1h(:, 2), 'DisplayName', 'Sample - Ty - 1Hz');
plot(ty_on(:, 3), ty_on(:, 2), 'DisplayName', 'Sample - Ty - ON');
plot(ty_of(:, 3), ty_of(:, 2), 'DisplayName', 'Sample - Ty - OFF');
hold off;
xlabel('Time [s]'); ylabel('Velocity [m/s]');
xlim([0, 2]);
legend('Location', 'southwest'); <<plt-matlab>>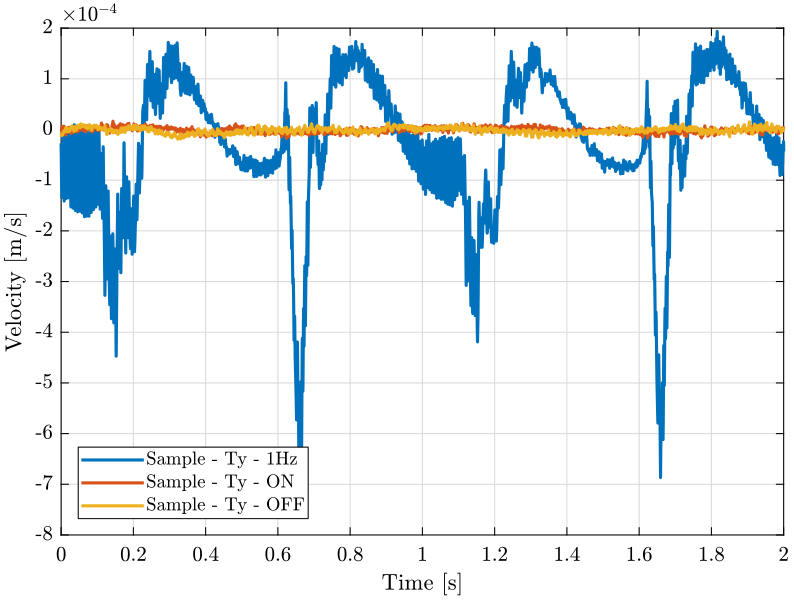
figure;
hold on;
plot(ty_1h(:, 3), ty_1h(:, 2)-ty_1h(:, 1), 'DisplayName', 'Relative Velocity - Ty - 1Hz');
plot(ty_on(:, 3), ty_on(:, 2)-ty_on(:, 1), 'DisplayName', 'Relative Velocity - Ty - ON');
plot(ty_of(:, 3), ty_of(:, 2)-ty_of(:, 1), 'DisplayName', 'Relative Velocity - Ty - OFF');
hold off;
xlabel('Time [s]'); ylabel('Velocity [m/s]');
xlim([0, 2]);
legend('Location', 'southwest'); <<plt-matlab>>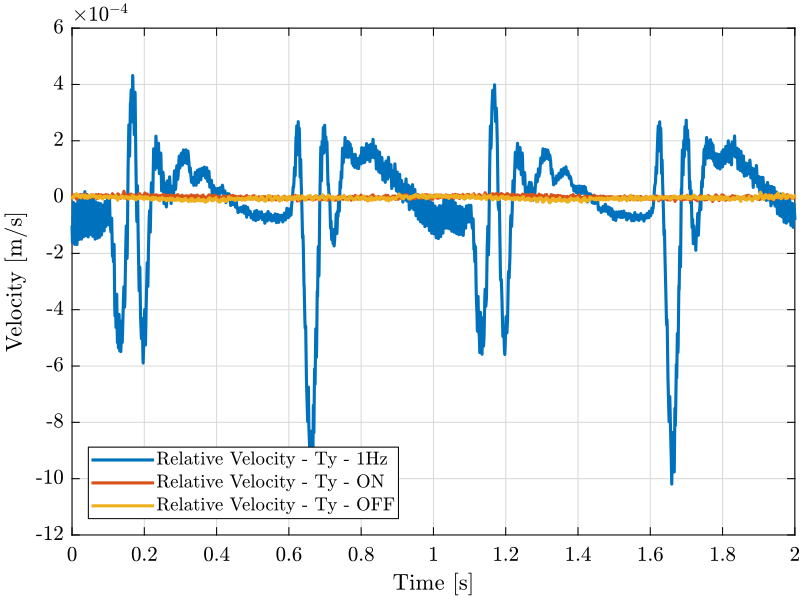
figure;
hold on;
plot(ty_1h(:, 3), lsim(1/s, ty_1h(:, 2)-ty_1h(:, 1), ty_1h(:, 3)), 'DisplayName', 'Relative Displacement- Ty - 1Hz');
plot(ty_on(:, 3), lsim(1/s, ty_on(:, 2)-ty_on(:, 1), ty_on(:, 3)), 'DisplayName', 'Relative Displacement- Ty - ON');
plot(ty_of(:, 3), lsim(1/s, ty_of(:, 2)-ty_of(:, 1), ty_of(:, 3)), 'DisplayName', 'Relative Displacement- Ty - OFF');
hold off;
xlabel('Time [s]'); ylabel('Displacement [m]');
xlim([0, 2]);
legend('Location', 'southwest'); <<plt-matlab>>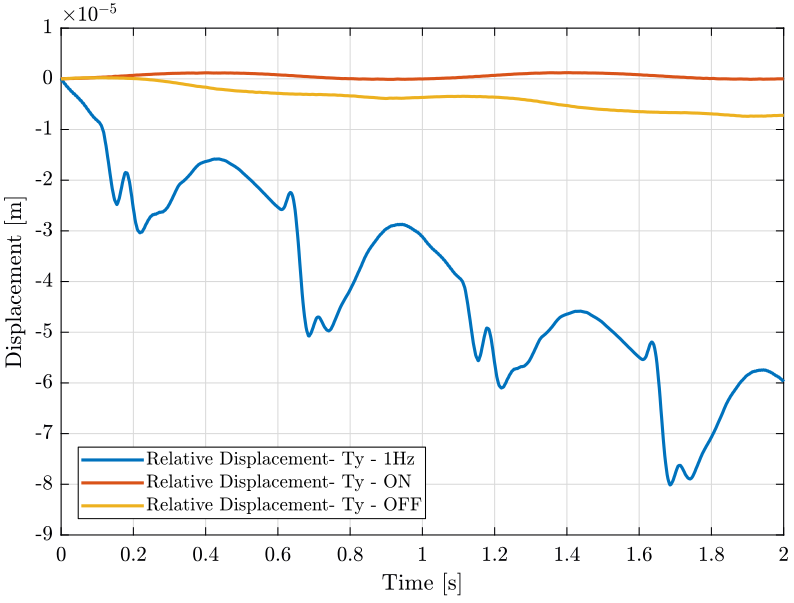
Frequency Domain
We first compute some parameters that will be used for the PSD computation.
dt = ty_of(2, 3)-ty_of(1, 3);
Fs = 1/dt; % [Hz]
win = hanning(ceil(10*Fs));
Then we compute the Power Spectral Density using pwelch function.
First for the geophone located on the marble
[pxof_m, f] = pwelch(ty_of(:, 1), win, [], [], Fs);
[pxon_m, ~] = pwelch(ty_on(:, 1), win, [], [], Fs);
[px1h_m, ~] = pwelch(ty_1h(:, 1), win, [], [], Fs);And for the geophone located at the sample position.
[pxof_s, f] = pwelch(ty_of(:, 2), win, [], [], Fs);
[pxon_s, ~] = pwelch(ty_on(:, 2), win, [], [], Fs);
[px1h_s, ~] = pwelch(ty_1h(:, 2), win, [], [], Fs);Finally, for the relative velocity.
[pxof_r, f] = pwelch(ty_of(:, 2)-ty_of(:, 1), win, [], [], Fs);
[pxon_r, ~] = pwelch(ty_on(:, 2)-ty_on(:, 1), win, [], [], Fs);
[px1h_r, ~] = pwelch(ty_1h(:, 2)-ty_1h(:, 1), win, [], [], Fs);And we plot the ASD of the measured velocities:
- figure fig:psd_marble_compare for the geophone located on the marble
- figure fig:psd_sample_compare for the geophone at the sample position
- figure fig:psd_relative_compare for the relative velocity
figure;
hold on;
plot(f, sqrt(px1h_m), 'DisplayName', 'Marble - Ty 1Hz');
plot(f, sqrt(pxon_m), 'DisplayName', 'Marble - Ty ON');
plot(f, sqrt(pxof_m), 'DisplayName', 'Marble - Ty OFF');
hold off;
set(gca, 'xscale', 'log');
set(gca, 'yscale', 'log');
xlabel('Frequency [Hz]'); ylabel('ASD of the measured velocity $\left[\frac{m/s}{\sqrt{Hz}}\right]$')
legend('Location', 'southwest');
xlim([1, 500]); <<plt-matlab>>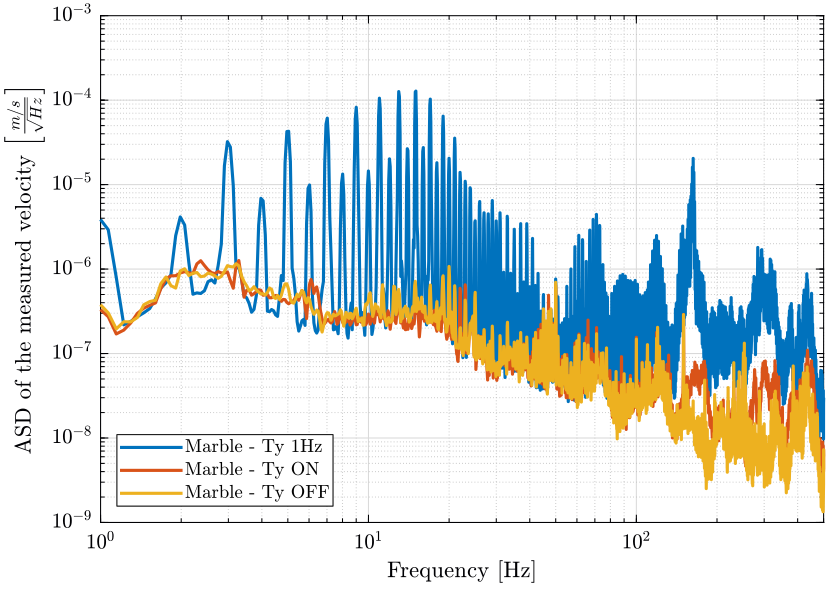
figure;
hold on;
plot(f, sqrt(px1h_s), 'DisplayName', 'Sample - Ty 1Hz');
plot(f, sqrt(pxon_s), 'DisplayName', 'Sample - Ty ON');
plot(f, sqrt(pxof_s), 'DisplayName', 'Sample - Ty OFF');
hold off;
set(gca, 'xscale', 'log');
set(gca, 'yscale', 'log');
xlabel('Frequency [Hz]'); ylabel('ASD of the measured velocity $\left[\frac{m/s}{\sqrt{Hz}}\right]$')
legend('Location', 'southwest');
xlim([1, 500]); <<plt-matlab>>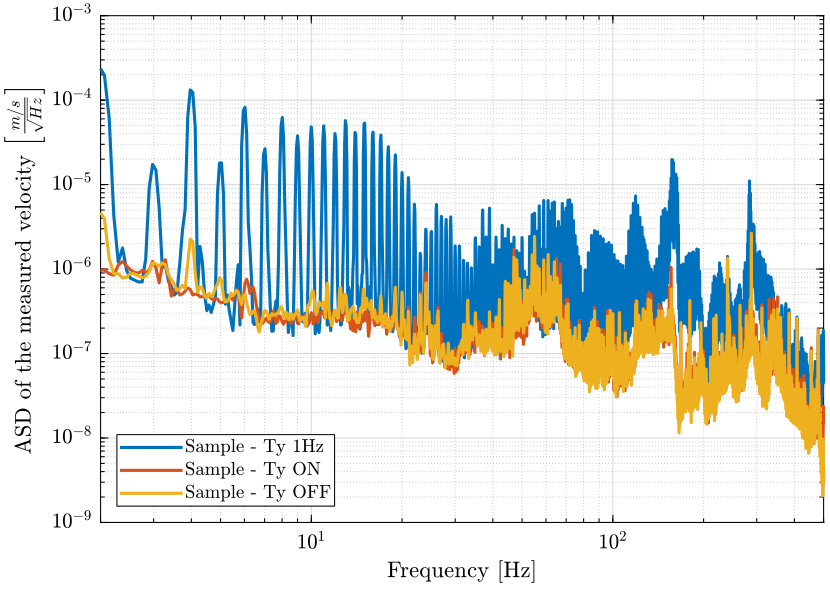
figure;
hold on;
plot(f, sqrt(px1h_r), 'DisplayName', 'Relative - Ty 1Hz');
plot(f, sqrt(pxon_r), 'DisplayName', 'Relative - Ty ON');
plot(f, sqrt(pxof_r), 'DisplayName', 'Relative - Ty OFF');
hold off;
set(gca, 'xscale', 'log');
set(gca, 'yscale', 'log');
xlabel('Frequency [Hz]'); ylabel('ASD of the measured velocity $\left[\frac{m/s}{\sqrt{Hz}}\right]$')
legend('Location', 'southwest');
xlim([1, 500]); <<plt-matlab>>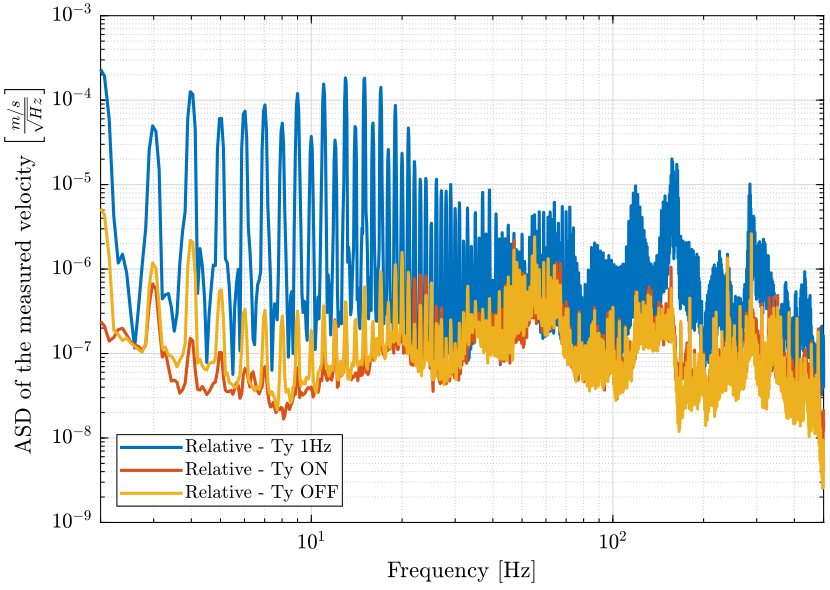
Ty motion and current
The position of the translation stage and current flowing in its actuator are measured using the elmo software and saved as an csv file.
Data pre-processing
Let's look at at the start of the csv file.
sed -n 1,30p mat/Ty-when-Rz-1Hz-and-Ty-1Hz.csv | nl -ba - 1 Elmo txt chart ver 2.0
2
3 [File Properties]
4 Creation Time,2019-05-13 05:33:43
5 Last Updated,2019-05-13 05:33:43
6 Resolution,0.001
7 Sampling Time,5E-05
8 Recording Time,5.461
9
10 [Chart Properties]
11 No.,Name,X Linear,X No.
12 1,Chart #1,True,0
13 2,Chart #2,True,0
14
15 [Chart Data]
16 Display No.,X No.,Y No.,X Unit,Y Unit,Color,Style,Width
17 1,1,2,sec,N/A,ff0000ff,Solid,TwoPoint
18 2,1,3,sec,N/A,ff0000ff,Solid,TwoPoint
19 2,1,4,sec,N/A,ff007f00,Solid,TwoPoint
20
21 [Signal Names]
22 1,Time (sec)
23 2,Position [cnt]
24 3,Current Command [A]
25 4,Total Current Command [A]
26
27 [Signals Data Group 1]
28 1,2,3,4,
29 0,-141044,-0.537239575086517,-0.537239575086517,
30 0.001,-143127,-0.530803752974691,-0.530803752974691,
The real data starts at line 29.
We then load this cvs file starting at line 29.
tye_on = csvread("mat/Ty-when-Rz-1Hz.csv", 29, 0);
tye_1h = csvread("mat/Ty-when-Rz-1Hz-and-Ty-1Hz.csv", 29, 0);Time domain data
We plot the position of the translation stage measured by the encoders.
There is 200000 encoder count for each mm, we then divide by 200000 to obtain mm.
The result is shown on figure fig:ty_position_time.
figure;
subplot(1, 2, 1);
plot(tye_on(:, 1), (tye_on(:, 2)-mean(tye_on(:, 2)))/200000);
xlim([0, 5]);
xlabel('Time [s]'); ylabel('Position [mm]');
legend({'Ty - ON'}, 'Location', 'northeast');
subplot(1, 2, 2);
plot(tye_1h(:, 1), (tye_1h(:, 2)-mean(tye_1h(:, 2)))/200000);
xlim([0, 5]);
xlabel('Time [s]'); ylabel('Position [mm]');
legend({'Ty - 1Hz'}, 'Location', 'northeast'); <<plt-matlab>>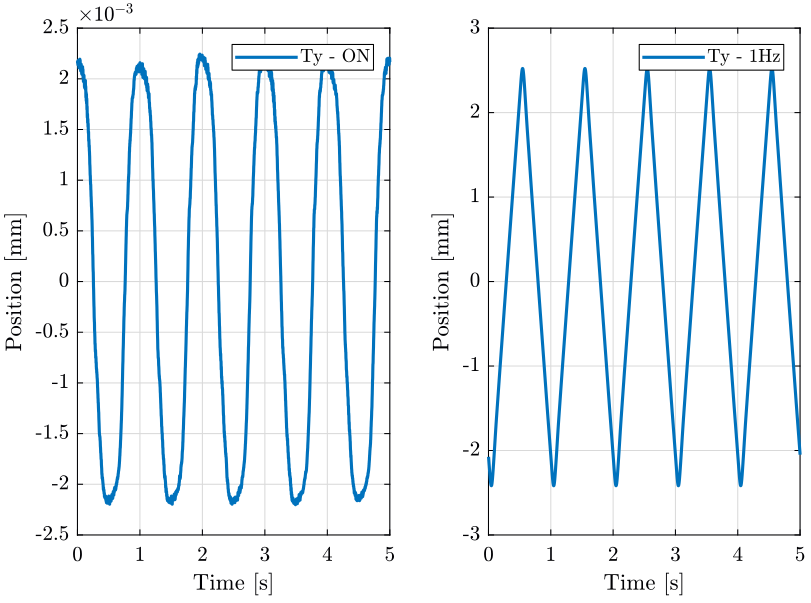
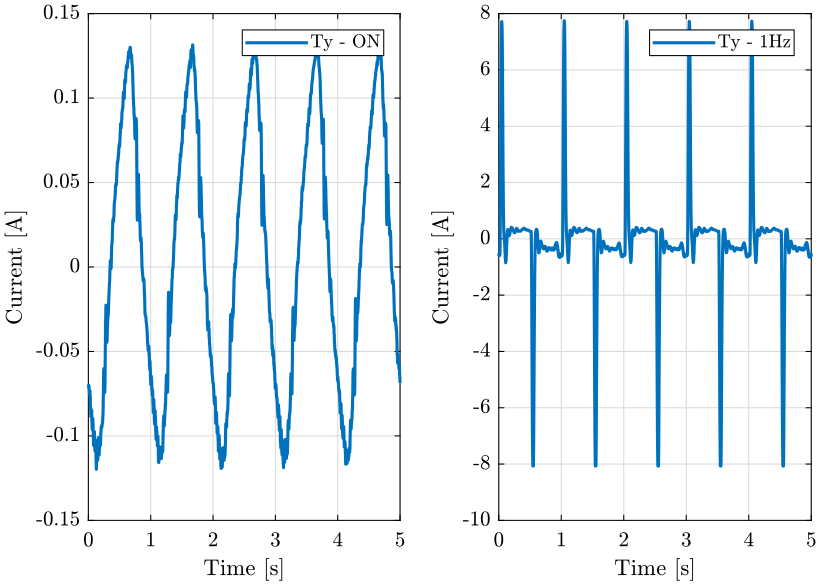
We also plot the current as function of the time on figure fig:ty_current_time.
figure;
subplot(1, 2, 1);
plot(tye_on(:, 1), tye_on(:, 3)-mean(tye_on(:, 3)));
xlim([0, 5]);
xlabel('Time [s]'); ylabel('Current [A]');
legend({'Ty - ON'}, 'Location', 'northeast');
subplot(1, 2, 2);
plot(tye_1h(:, 1), tye_1h(:, 3)-mean(tye_1h(:, 3)));
xlim([0, 5]);
xlabel('Time [s]'); ylabel('Current [A]');
legend({'Ty - 1Hz'}, 'Location', 'northeast'); <<plt-matlab>>