22 KiB
Modal Analysis - Processing of FRF
- ZIP file containing the data and matlab files
- Importation of measured FRF curves
- From accelerometer DOFs to solid body DOFs - Mathematics
- What reference frame to choose?
- From accelerometer DOFs to solid body DOFs - Matlab Implementation
- Analysis of some FRF in the global coordinates
- Comparison of the relative motion of solid bodies
- Verify that we find the original FRF from the FRF in the global coordinates
- Saving of the FRF expressed in the global coordinates
The measurements have been conducted and we have computed the $n \times p \times q$ Frequency Response Functions Matrix with:
- $n$: the number of measurements: $23 \times 3 = 69$ (23 accelerometers measuring 3 directions each)
- $p$: the number of excitation inputs: $3$
- $q$: the number of frequency points $\omega_i$
However, in our model, we only consider 6 solid bodies, namely:
- Bottom Granite
- Top Granite
- Translation Stage
- Tilt Stage
- Spindle
- Hexapod
Thus, we are only interested in $6 \times 6 = 36$ degrees of freedom.
We here process the FRF matrix to go from the 69 measured DOFs to the wanted 36 DOFs.
ZIP file containing the data and matlab files ignore
All the files (data and Matlab scripts) are accessible here.
Importation of measured FRF curves
We load the measured FRF and Coherence matrices. We also load the geometric parameters of the station: solid bodies considered and the position of the accelerometers.
load('mat/frf_coh_matrices.mat', 'FRFs', 'COHs', 'freqs');
load('mat/geometry.mat', 'solids', 'solid_names', 'acc_pos');From accelerometer DOFs to solid body DOFs - Mathematics
Let's consider the schematic shown on figure fig:local_to_global_coordinates where we are measuring the motion of a (supposed) solid body at 4 distinct points in x-y-z.
The goal here is to link these $4 \times 3 = 12$ measurements to the 6 DOFs of the solid body expressed in the frame $\{O\}$.
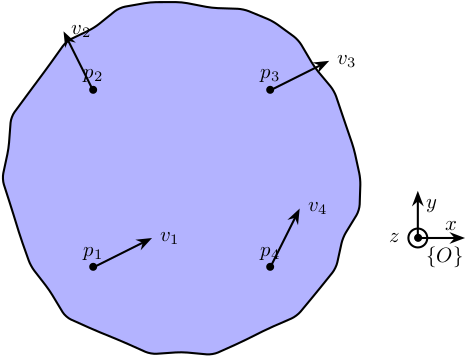
From the figure fig:local_to_global_coordinates, we can write:
\begin{align*} \vec{v}_1 &= \vec{v} + \Omega \vec{p}_1\\ \vec{v}_2 &= \vec{v} + \Omega \vec{p}_2\\ \vec{v}_3 &= \vec{v} + \Omega \vec{p}_3\\ \vec{v}_4 &= \vec{v} + \Omega \vec{p}_4 \end{align*}With
\begin{equation} \Omega = \begin{bmatrix} 0 & -\Omega_z & \Omega_y \\ \Omega_z & 0 & -\Omega_x \\ -\Omega_y & \Omega_x & 0 \end{bmatrix} \end{equation}$\vec{v}$ and $\Omega$ represent to velocity and rotation of the solid expressed in the frame $\{O\}$.
We can rearrange the equations in a matrix form:
\begin{equation} \left[\begin{array}{ccc|ccc} 1 & 0 & 0 & 0 & p_{1z} & -p_{1y} \\ 0 & 1 & 0 & -p_{1z} & 0 & p_{1x} \\ 0 & 0 & 1 & p_{1y} & -p_{1x} & 0 \\ \hline & \vdots & & & \vdots & \\ \hline 1 & 0 & 0 & 0 & p_{4z} & -p_{4y} \\ 0 & 1 & 0 & -p_{4z} & 0 & p_{4x} \\ 0 & 0 & 1 & p_{4y} & -p_{4x} & 0 \end{array}\right] \begin{bmatrix} v_x \\ v_y \\ v_z \\ \hline \Omega_x \\ \Omega_y \\ \Omega_z \end{bmatrix} = \begin{bmatrix} v_{1x} \\ v_{1y} \\ v_{1z} \\\hline \vdots \\\hline v_{4x} \\ v_{4y} \\ v_{4z} \end{bmatrix} \end{equation}and then we obtain the velocity and rotation of the solid in the wanted frame $\{O\}$:
\begin{equation} \begin{bmatrix} v_x \\ v_y \\ v_z \\ \hline \Omega_x \\ \Omega_y \\ \Omega_z \end{bmatrix} = \left[\begin{array}{ccc|ccc} 1 & 0 & 0 & 0 & p_{1z} & -p_{1y} \\ 0 & 1 & 0 & -p_{1z} & 0 & p_{1x} \\ 0 & 0 & 1 & p_{1y} & -p_{1x} & 0 \\ \hline & \vdots & & & \vdots & \\ \hline 1 & 0 & 0 & 0 & p_{4z} & -p_{4y} \\ 0 & 1 & 0 & -p_{4z} & 0 & p_{4x} \\ 0 & 0 & 1 & p_{4y} & -p_{4x} & 0 \end{array}\right]^{-1} \begin{bmatrix} v_{1x} \\ v_{1y} \\ v_{1z} \\\hline \vdots \\\hline v_{4x} \\ v_{4y} \\ v_{4z} \end{bmatrix} \end{equation}This inversion is equivalent to resolving a mean square problem.
What reference frame to choose?
The question we wish here to answer is how to choose the reference frame $\{O\}$ in which the DOFs of the solid bodies are defined.
The goal is to compare the motion of each solid body to see which relative DOFs between solid bodies can be neglected, that is to say, which joint between solid bodies can be regarded as perfect (and this in all the frequency range of interest). Ideally, we would like to have the same number of degrees of freedom than the number of identified modes.
The possibles choices are:
- One frame for each solid body which is located at its center of mass
- One common frame, for instance located at the point of interest ($270mm$ above the Hexapod)
- Base located at the joint position: this is where we want to see the motion and estimate stiffness
| Chosen Frame | Advantages | Disadvantages |
|---|---|---|
| Frames at CoM | Physically, it makes more sense | How to compare the motion of the solid bodies? |
| Common Frame | We can compare the motion of each solid body | Small $\theta_{x, y}$ may result in large $T_{x, y}$ |
| Frames at joint position | Directly gives which joint direction can be blocked | How to choose the joint position? |
As the easiest choice is to choose a common frame, we start with that solution.
From accelerometer DOFs to solid body DOFs - Matlab Implementation
First, we initialize a new FRF matrix FRFs_O which is an $n \times p \times q$ with:
- $n$ is the number of DOFs of the considered 6 solid-bodies: $6 \times 6 = 36$
- $p$ is the number of excitation inputs: $3$
- $q$ is the number of frequency points $\omega_i$
For each frequency point $\omega_i$, the FRF matrix FRFs_O is a $n\times p$ matrix:
where 1, 2, …, 6 corresponds to the 6 solid bodies.
FRFs_O = zeros(length(solid_names)*6, 3, 801);Then, as we know the positions of the accelerometers on each solid body, and we have the response of those accelerometers, we can use the equations derived in the previous section to determine the response of each solid body expressed in the frame $\{O\}$.
for solid_i = 1:length(solid_names)
solids_i = solids.(solid_names{solid_i});
A = zeros(3*length(solids_i), 6);
for i = 1:length(solids_i)
acc_i = solids_i(i);
A(3*(i-1)+1:3*i, 1:3) = eye(3);
A(3*(i-1)+1:3*i, 4:6) = [ 0 acc_pos(acc_i, 3) -acc_pos(acc_i, 2) ;
-acc_pos(acc_i, 3) 0 acc_pos(acc_i, 1) ;
acc_pos(acc_i, 2) -acc_pos(acc_i, 1) 0];
end
for exc_dir = 1:3
FRFs_O((solid_i-1)*6+1:solid_i*6, exc_dir, :) = A\squeeze(FRFs((solids_i(1)-1)*3+1:solids_i(end)*3, exc_dir, :));
end
endAnalysis of some FRF in the global coordinates
First, we can compare the motions of the 6 solid bodies in one direction (figure fig:frf_all_bodies_one_direction)
We can also compare all the DOFs of one solid body (figure fig:frf_one_body_all_directions).
<<plt-matlab>>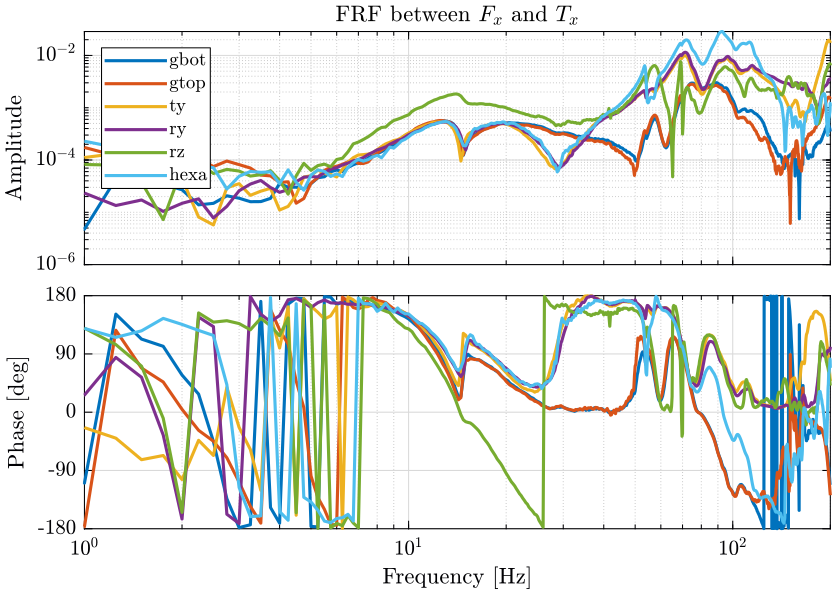
<<plt-matlab>>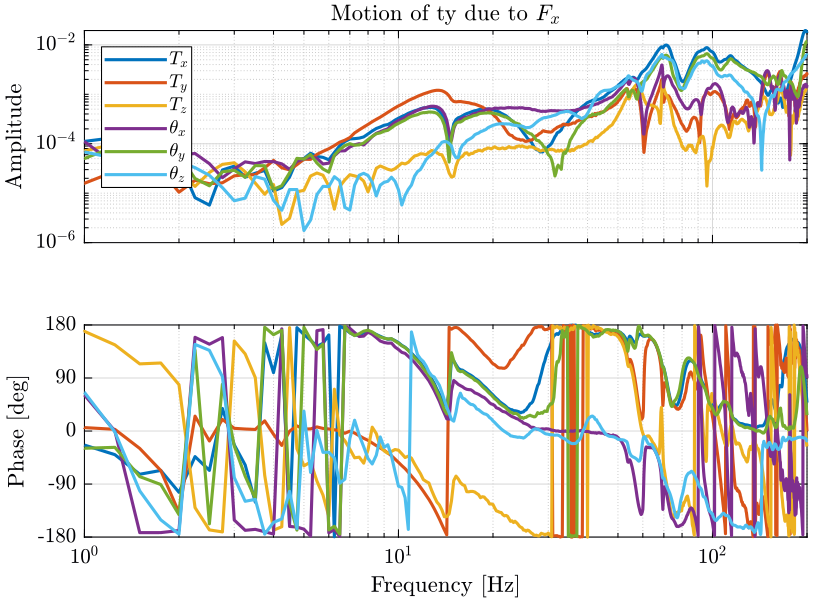
Comparison of the relative motion of solid bodies
Now that the motion of all the solid bodies are expressed in the same frame, we should be able to compare them. This can be used to determine what joints direction between two solid bodies is stiff enough that we can fix this DoF. This could help reduce the order of the model and simplify the extraction of the model parameters from the measurements.
We decide to plot the "normalized relative motion" between solid bodies $i$ and $j$: \[ 0 < \Delta_{ij, x} = \frac{\left| D_{i,x} - D_{j,x} \right|}{|D_{i,x}| + |D_{j,x}|} < 1 \]
Then, if $\Delta_{ij,x} \ll 0$ in the frequency band of interest, we have that $D_{ix} \approx D_{jx}$ and we can neglect that DOF between the two solid bodies $i$ and $j$.
This normalized relative motion is shown on figure fig:relative_motion_comparison for all the directions and for all the adjacent pair of solid bodies.
<<plt-matlab>>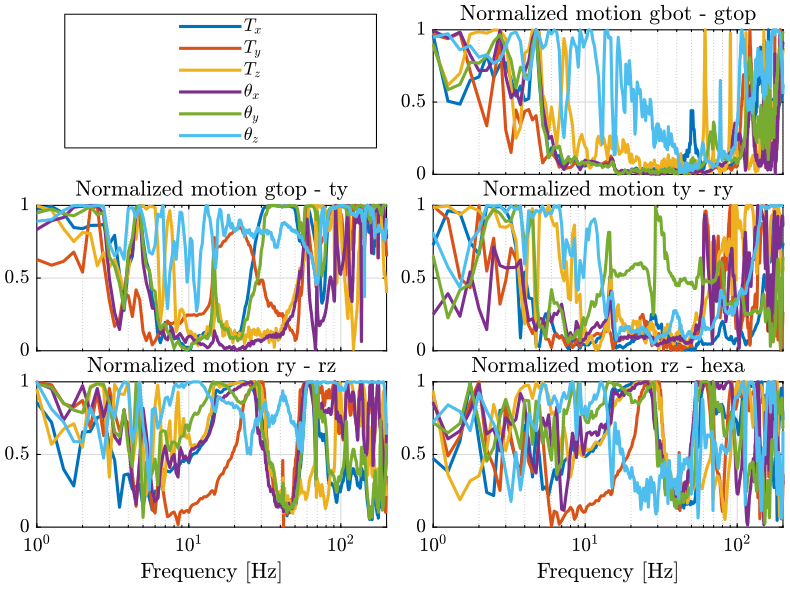
Can we really compare the motion of two solid bodies from Frequency Response Functions that clearly depends on the excitation point and direction? The relative motion of two solid bodies may be negligible when exciting the structure at on point and but at another point.
Verify that we find the original FRF from the FRF in the global coordinates
We have computed the Frequency Response Functions Matrix FRFs_O representing the response of the 6 solid bodies in their 6 DOFs.
From the response of one body in its 6 DOFs, we should be able to compute the FRF of each of its accelerometer fixed to it during the measurement.
We can then compare the result with the original measurements. This will help us to determine if:
- the previous inversion used is correct
- the solid body assumption is correct in the frequency band of interest
FRF_recovered = zeros(size(FRFs));
% For each excitation direction
for exc_dir = 1:3
% For each solid
for solid_i = 1:length(solid_names)
v0 = squeeze(FRFs_O((solid_i-1)*6+1:(solid_i-1)*6+3, exc_dir, :));
W0 = squeeze(FRFs_O((solid_i-1)*6+4:(solid_i-1)*6+6, exc_dir, :));
% For each accelerometer attached to the current solid
for acc_i = solids.(solid_names{solid_i})
% We get the position of the accelerometer expressed in frame O
pos = acc_pos(acc_i, :)';
posX = [0 pos(3) -pos(2); -pos(3) 0 pos(1) ; pos(2) -pos(1) 0];
FRF_recovered(3*(acc_i-1)+1:3*(acc_i-1)+3, exc_dir, :) = v0 + posX*W0;
end
end
endWe then compare the original FRF measured for each accelerometer with the recovered FRF from the global FRF matrix in the common frame.
The FRF for the 4 accelerometers on the Hexapod are compared on figure fig:recovered_frf_comparison_hexa. All the FRF are matching very well in all the frequency range displayed.
The FRF for accelerometers located on the translation stage are compared on figure fig:recovered_frf_comparison_ty. The FRF are matching well until 100Hz.
<<plt-matlab>>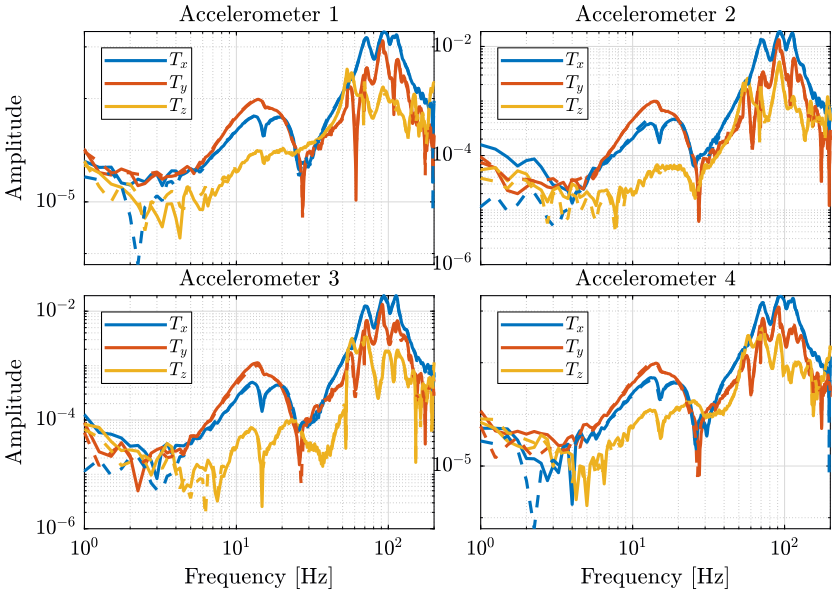
<<plt-matlab>>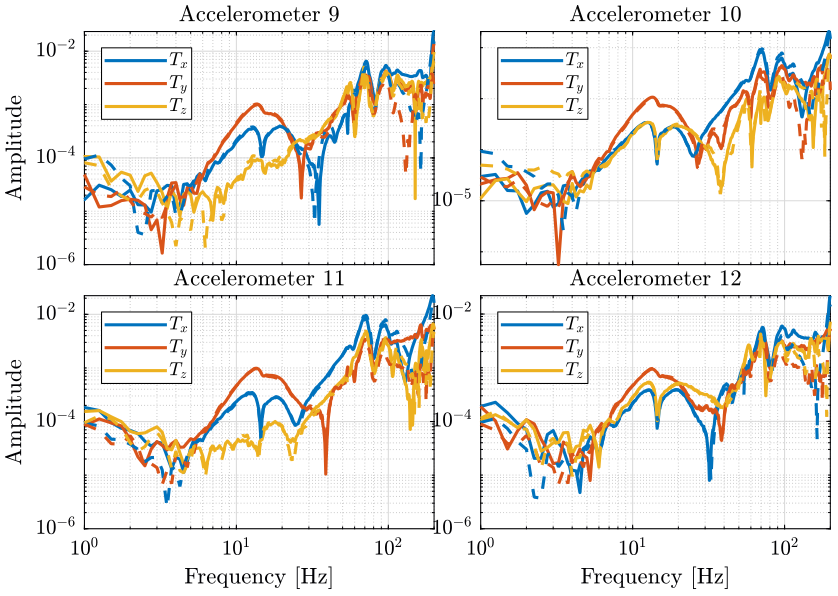
The reduction of the number of degrees of freedom from 69 (23 accelerometers with each 3DOF) to 36 (6 solid bodies with 6 DOF) seems to work well.
This confirms the fact that the stages are indeed behaving as a solid body in the frequency band of interest. This valid the fact that a multi-body model can be used to represent the dynamics of the micro-station.
Saving of the FRF expressed in the global coordinates
save('mat/frf_o.mat', 'FRFs_O');