Folder name is changed, rework the html templates Change the organisation.
4.8 KiB
4.8 KiB
#+TITLE:Static Measurements
Notes
- 5530: Straightness Plot: Yz
- Filename:
r:\home\PDMU\PEL\Measurement_library\ID31\ID31_u_station\TY\12_12_2018\linear deviation _tyz_401_points.txt - Acquisition date: 09/01/2019 13:49:42
- Current date: 08/03/2019 08:46:35
- Measurement Type: STRAIGHTNESS vertical
- Travel Mode: Bidirectional
- Number of Target Positions: 401
- Number of total data pairs: 2406
- Number of total data runs:6
- Position Value Units: millimeters
- Error Value Units: micrometers
| Environmental Data | Min | Max | Avg |
|---|---|---|---|
| Air Temp (C) | 024,57 | 024,61 | 024,59 |
| Air Prs (mm) | 742,56 | 743,29 | 742,83 |
| Air Hmd (%) | 024,00 | 024,00 | 024,00 |
| MT1 Temp (C) | 020,00 | ||
| MT2 Temp (C) | 024,40 | 024,44 | 024,42 |
| MT3 Temp (C) | 024,32 | 024,36 | 024,34 |
Data Pre-processing
sed 's/\t/ /g;s/\,/./g' "data/linear deviation _tyz_401_points.txt" > data/data.txt head "data/data.txt"| Run | Pos | TargetValue | ErrorValue |
|---|---|---|---|
| 1 | 1 | -4.5E+00 | 7.5377892E+00 |
| 1 | 2 | -4.4775E+00 | 7.5422246E+00 |
| 1 | 3 | -4.455E+00 | 7.5655617E+00 |
| 1 | 4 | -4.4325E+00 | 7.5149518E+00 |
| 1 | 5 | -4.41E+00 | 7.4886377E+00 |
| 1 | 6 | -4.3875E+00 | 7.437007E+00 |
| 1 | 7 | -4.365E+00 | 7.4449354E+00 |
| 1 | 8 | -4.3425E+00 | 7.3937387E+00 |
| 1 | 9 | -4.32E+00 | 7.3287468E+00 |
Matlab - Data Import
filename = 'data/data.txt';
fileID = fopen(filename);
data = cell2mat(textscan(fileID,'%f %f %f %f', 'collectoutput', 1,'headerlines',1));
fclose(fileID);Data - Plot
figure;
hold on;
for i=1:data(end, 1)
plot(data(data(:, 1) == i, 3), data(data(:, 1) == i, 4), '-k');
end
hold off;
xlabel('Target Value [mm]'); ylabel('Error Value [um]'); <<plt-matlab>>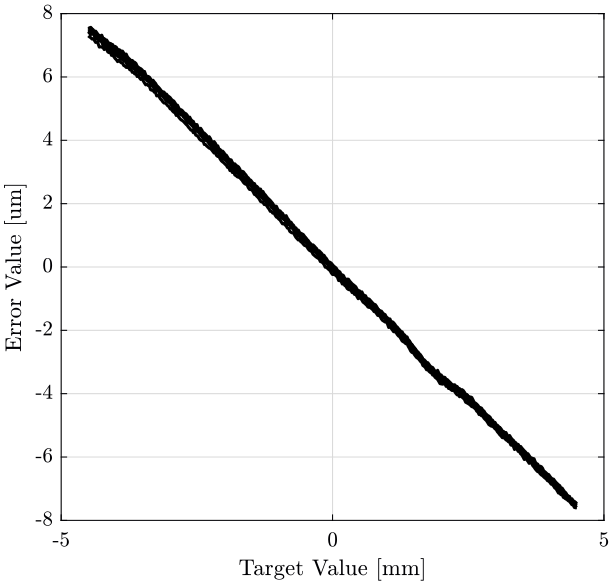
Compute mean value of each position
mean_pos = zeros(sum(data(:, 1)==1), 1);
for i=1:sum(data(:, 1)==1)
mean_pos(i) = mean(data(data(:, 2)==i, 4));
end figure;
hold on;
for i=1:data(end, 1)
filt = data(:, 1) == i;
plot(data(filt, 3), data(filt, 4) - mean_pos, '-k');
end
hold off;
xlabel('Target Value [mm]'); ylabel('Error Value [um]'); <<plt-matlab>>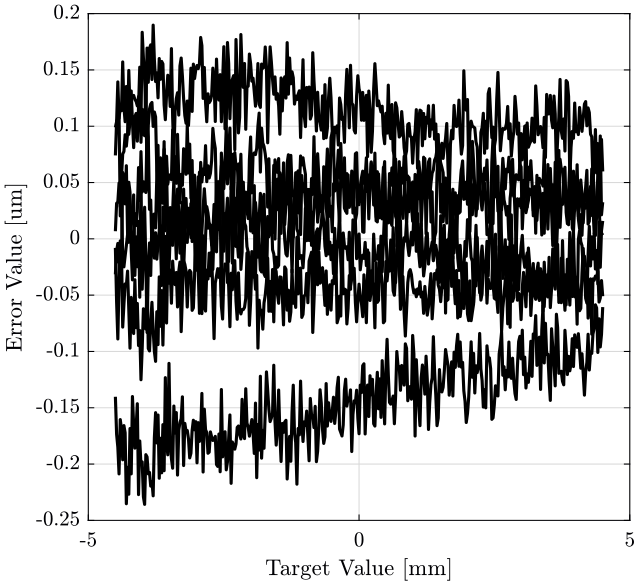
Translate to time domain
t = linspace(0, 1, length(data(data(:, 1)==1, 4))); figure;
hold on;
plot(t, data(data(:, 1) == 1, 4) - mean_pos, '-k');
hold off;
xlabel('Time [s]'); ylabel('Error Value [um]'); <<plt-matlab>>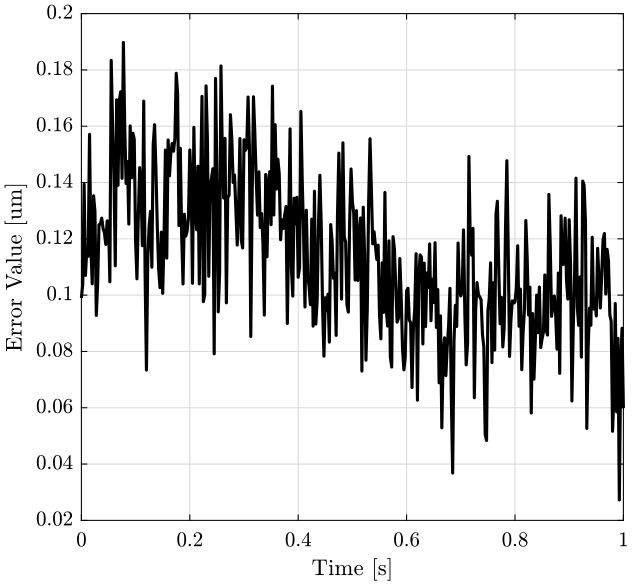
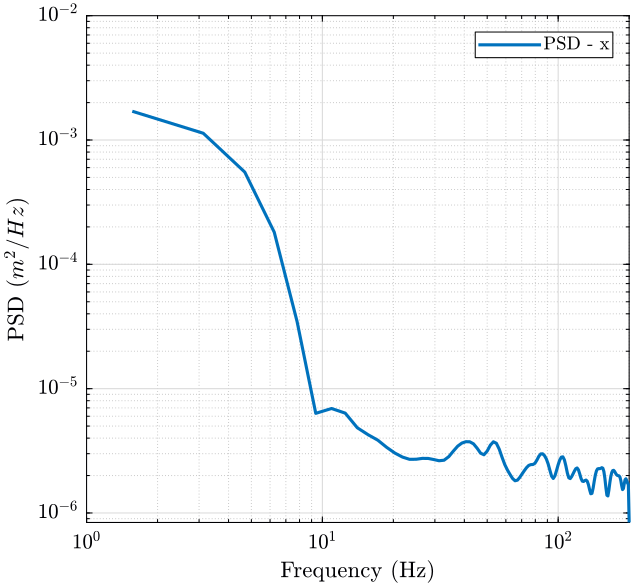
Compute the PSD
n_av = 5;
Fs = 1/t(2);
x = data(data(:, 1) == 1, 4) - mean_pos;
[pxx, f] = pwelch(x, hanning(ceil(length(x)/n_av)), [], [], Fs);
pxx_t = zeros(length(pxx), data(end, 1));
for i=1:data(end, 1)
x = data(data(:, 1) == i, 4) - mean_pos;
[pxx, f] = pwelch(x, hanning(ceil(length(x)/n_av)), [], [], Fs);
pxx_t(:, i) = pxx;
end figure;
hold on;
plot(f, mean(pxx_t, 2));
hold off;
xlabel('Frequency (Hz)');
ylabel('PSD ($m^2/Hz$)');
set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log');
legend({'PSD - x', 'PSD - y', 'PSD - z'}); <<plt-matlab>>