13 KiB
13 KiB
Measurements
- Experimental conditions
- Measurements procedure
- Measurement Channels
- Experiments
- Data Analysis
- Results
Experimental conditions
| Date | 2018-01-12 |
| Sensors | Geophones |
| Excitation | Instrumented Hammer |
| Location | Laboratory |
| Notes | Unglued Granite |
- The granite is not glued to the floor
- FS = 512Hz
- Made by Marc Lesourd on the 12 of January 2018
Goal: Obtain better coherence at low frequency.
Measurements procedure
Geophones L-28LB geophones (table tab:L-28LB) are placed on
- Marle
- Tilt Stage
- Top of Hexapod
| Natural Frequency [Hz] | 4.5 |
| Weight [g] | 140 |
| Sensitivity [V/(m/s)] | 31.3 |
The structure is excited using an instrumented hammer with impacts on
- Marble X-Y-Z
- Hexapod X-Y-Z
Measurement Channels
| Ch. nb | Element | Location | Direction |
|---|---|---|---|
| 1 | Hammer | variable | |
| 2 | Geophone | Marble | X-Y-Z |
| 3 | Geophone | Tilt stage | X-Y-Z |
| 4 | Geophone | Top of Hexapod | X-Y-Z |
Experiments
| Meas. nb | Location | Direction |
|---|---|---|
| 1 | Marble | X |
| 2 | Hexapod | X |
| 3 | Marble | Y |
| 4 | Hexapod | Y |
| 5 | Marble | Z |
| 6 | Hexapod | Z |
Data Analysis
Loading and pre-processing of the data
The Geophone sensitivity is defined below:
w0 = 4.5*2*pi; % [rad/s]
ksi = 0.38;
G0 = 31.3; % [V/(m/s)]
G = G0*(s/w0)^2/((s/w0)^2 + 2*ksi*(s/w0) + 1); % [V/(m/s)]We then:
- load the data
- add a minus sign when needed
- integrate the signal to have displacement instead of velocity
- scaled with the sensitivity of the Geophone
load('./raw_data/freq_frf.mat') % freq_frf
w = j*2*pi*freq_frf; % j.omega in [rad/s]
scaling = squeeze(freqresp(G, 2*pi*freq_frf))/G0;
load('./raw_data/frf_marble_x.mat') % ReIm1
frf_marble_x = zeros(size(ReIm1, 1), 3);
frf_marble_x(:, 1) = -ReIm1(:, 2)./w./scaling; % marble_x
frf_marble_x(:, 2) = -ReIm1(:, 3)./w./scaling; % tilt_x
frf_marble_x(:, 3) = -ReIm1(:, 4)./w./scaling; % hexa_x
load('./raw_data/frf_hexa_x.mat') % ReIm2
frf_hexa_x = zeros(size(ReIm2, 1), 3);
frf_hexa_x(:, 1) = -ReIm2(:, 2)./w./scaling; % marble_x
frf_hexa_x(:, 2) = -ReIm2(:, 3)./w./scaling; % tilt_x
frf_hexa_x(:, 3) = -ReIm2(:, 4)./w./scaling; % hexa_x
load('./raw_data/frf_marble_y.mat') % ReIm3
frf_marble_y = zeros(size(ReIm3, 1), 3);
frf_marble_y(:, 1) = -ReIm3(:, 2)./w./scaling; % marble_y
frf_marble_y(:, 2) = -ReIm3(:, 3)./w./scaling; % tilt_y
frf_marble_y(:, 3) = -ReIm3(:, 4)./w./scaling; % hexa_y
load('./raw_data/frf_hexa_y.mat') % ReIm4
frf_hexa_y = zeros(size(ReIm4, 1), 3);
frf_hexa_y(:, 1) = ReIm4(:, 2)./w./scaling; % marble_y
frf_hexa_y(:, 2) = ReIm4(:, 3)./w./scaling; % tilt_y
frf_hexa_y(:, 3) = ReIm4(:, 4)./w./scaling; % hexa_y
load('./raw_data/frf_marble_z.mat') % ReIm5
frf_marble_z = zeros(size(ReIm5, 1), 3);
frf_marble_z(:, 1) = ReIm5(:, 2)./w./scaling; % marble_z
frf_marble_z(:, 2) = ReIm5(:, 3)./w./scaling; % tilt_z
frf_marble_z(:, 3) = ReIm5(:, 4)./w./scaling; % hexa_z
load('./raw_data/frf_hexa_z.mat') % ReIm6
frf_hexa_z = zeros(size(ReIm6, 1), 3);
frf_hexa_z(:, 1) = ReIm6(:, 2)./w./scaling; % marble_z
frf_hexa_z(:, 2) = ReIm6(:, 3)./w./scaling; % tilt_z
frf_hexa_z(:, 3) = ReIm6(:, 4)./w./scaling; % hexa_z load('./raw_data/coher_marble_x.mat') % coh1
coh_marble_x = zeros(size(coh1, 1), 3);
coh_marble_x(:, 1) = coh1(:, 2); % marble_x
coh_marble_x(:, 2) = coh1(:, 3); % tilt_x
coh_marble_x(:, 3) = coh1(:, 4); % hexa_x
load('./raw_data/coher_hexa_x.mat') % coh2
coh_hexa_x = zeros(size(coh2, 1), 3);
coh_hexa_x(:, 1) = coh2(:, 2); % marble_x
coh_hexa_x(:, 2) = coh2(:, 3); % tilt_x
coh_hexa_x(:, 3) = coh2(:, 4); % hexa_x
load('./raw_data/coher_marble_y.mat') % coh3
coh_marble_y = zeros(size(coh3, 1), 3);
coh_marble_y(:, 1) = coh3(:, 2); % marble_y
coh_marble_y(:, 2) = coh3(:, 3); % tilt_y
coh_marble_y(:, 3) = coh3(:, 4); % hexa_y
load('./raw_data/coher_hexa_y.mat') % coh4
coh_hexa_y = zeros(size(coh4, 1), 3);
coh_hexa_y(:, 1) = coh4(:, 2); % marble_y
coh_hexa_y(:, 2) = coh4(:, 3); % tilt_y
coh_hexa_y(:, 3) = coh4(:, 4); % hexa_y
load('./raw_data/coher_marble_z.mat') % coh5
coh_marble_z = zeros(size(coh5, 1), 3);
coh_marble_z(:, 1) = coh5(:, 2); % marble_z
coh_marble_z(:, 2) = coh5(:, 3); % tilt_z
coh_marble_z(:, 3) = coh5(:, 4); % hexa_z
load('./raw_data/coher_hexa_z.mat') % coh6
coh_hexa_z = zeros(size(coh6, 1), 3);
coh_hexa_z(:, 1) = coh6(:, 2); % marble_z
coh_hexa_z(:, 2) = coh6(:, 3); % tilt_z
coh_hexa_z(:, 3) = coh6(:, 4); % hexa_zX-direction FRF
<<plt-matlab>>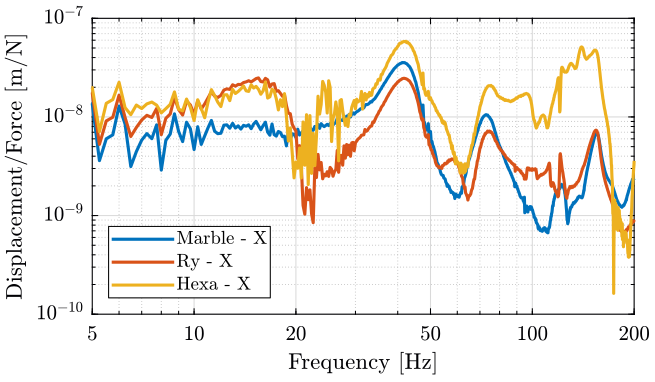
<<plt-matlab>>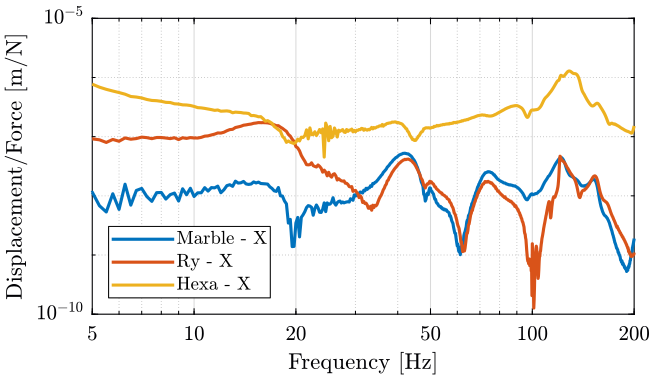
Y-direction FRF
<<plt-matlab>>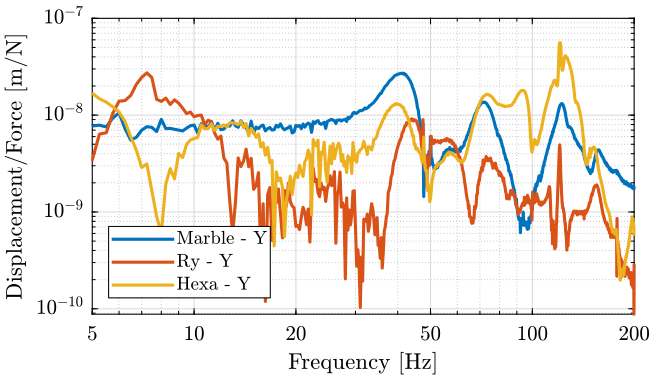
<<plt-matlab>>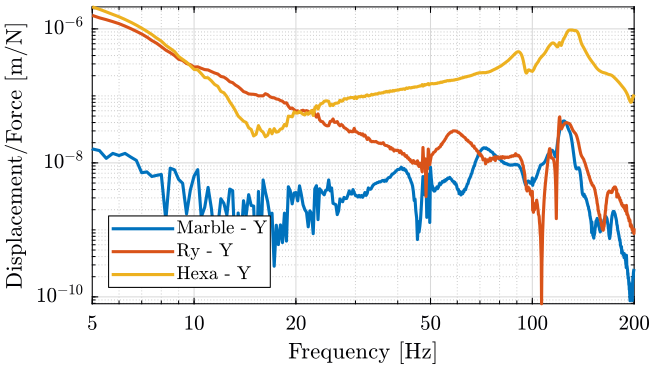
Z-direction FRF
<<plt-matlab>>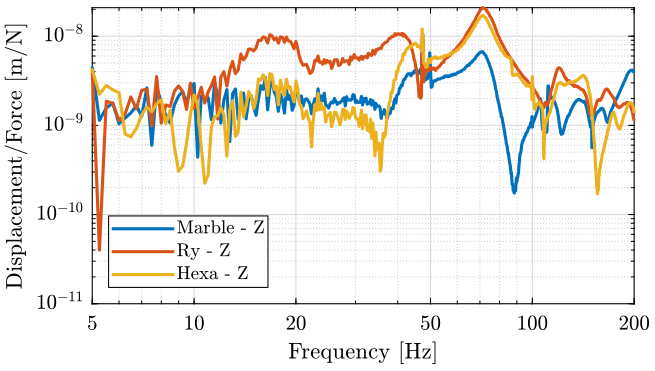
<<plt-matlab>>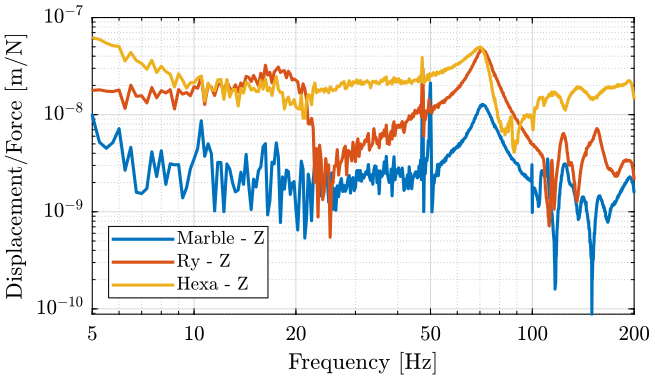
Save the processed data
Finally, we save the processed data.
save('./data/id31_microstation_2018_01_12_frf.mat', ...
'freq_frf', ...
'frf_marble_x', ...
'frf_marble_y', ...
'frf_marble_z', ...
'frf_hexa_x', ...
'frf_hexa_y', ...
'frf_hexa_z');
save('./data/id31_microstation_2018_01_12_coh.mat', ...
'freq_frf', ...
'coh_marble_x', ...
'coh_marble_y', ...
'coh_marble_z', ...
'coh_hexa_x', ...
'coh_hexa_y', ...
'coh_hexa_z');Results
- Resonances at 42Hz, 70Hz and 125Hz have been identified
- The coherence is much better than when using accelerometers