27 KiB
Encoder - Test Bench
- Experimental Setup
- Huddle Test
- Comparison Interferometer / Encoder
- Identification
- Change of Stiffness due to Sensors stack being open/closed circuit
- Generated Number of Charge / Voltage
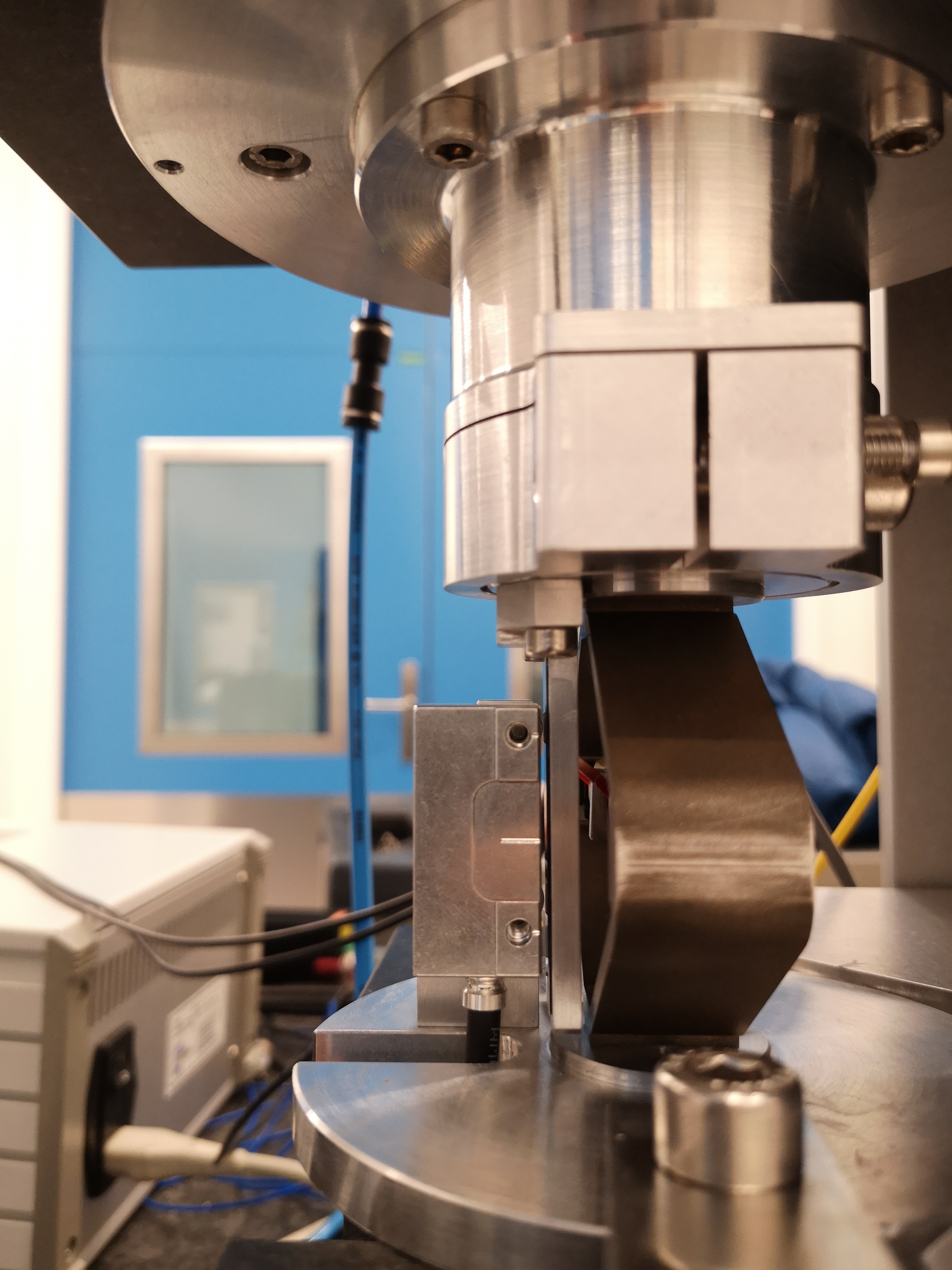
Experimental Setup
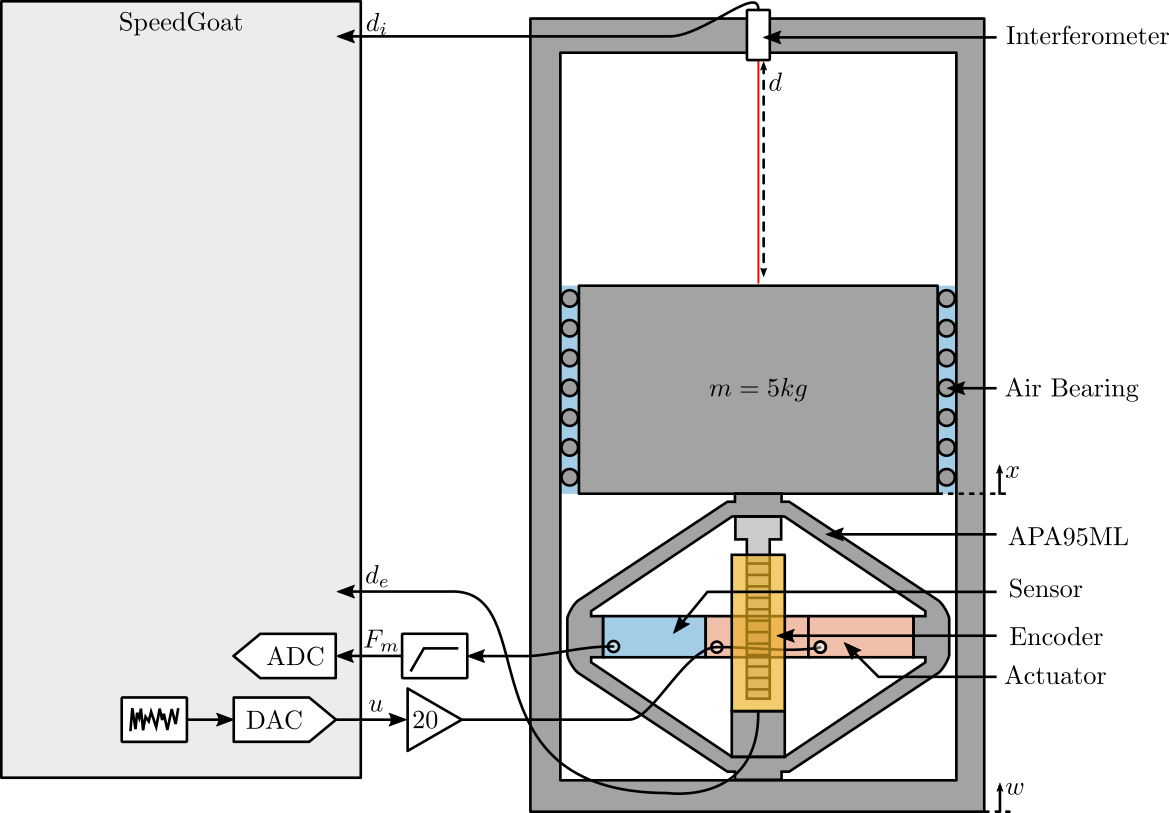
The experimental Setup is schematically represented in Figure fig:exp_setup_schematic.
The mass can be vertically moved using the amplified piezoelectric actuator. The displacement of the mass (relative to the mechanical frame) is measured both by the interferometer and by the encoder.

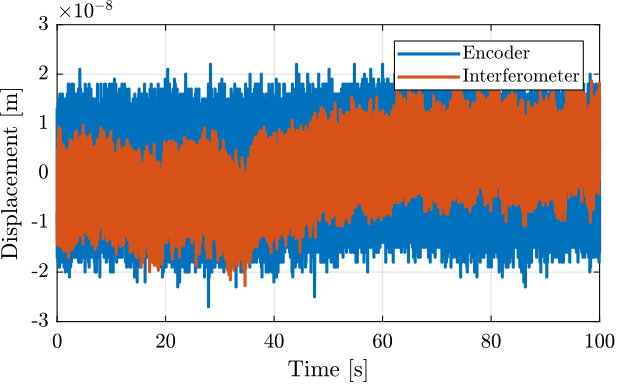
Huddle Test
Introduction ignore
The goal in this section is the estimate the noise of both the encoder and the intereferometer.
Nothing is then to the actuator such that the relative motion between the mass and the frame is as small as possible. Ideally, a mechanical part would clamp the two together, we here suppose that the APA is still enough to clamp the two together.
Load Data
load('mat/int_enc_huddle_test.mat', 'interferometer', 'encoder', 't'); interferometer = detrend(interferometer, 0);
encoder = detrend(encoder, 0);Time Domain Results
G_lpf = 1/(1 + s/2/pi/10);
Frequency Domain Noise
Ts = 1e-4;
win = hann(ceil(10/Ts));
[p_i, f] = pwelch(interferometer, win, [], [], 1/Ts);
[p_e, ~] = pwelch(encoder, win, [], [], 1/Ts);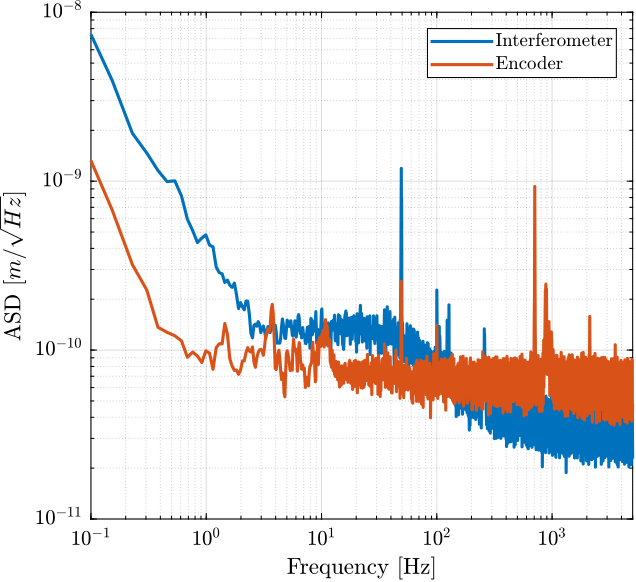
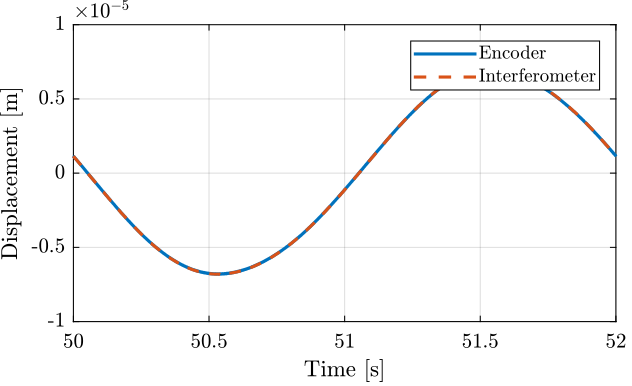
Comparison Interferometer / Encoder
Introduction ignore
The goal here is to make sure that the interferometer and encoder measurements are coherent. We may see non-linearity in the interferometric measurement.
Load Data
load('mat/int_enc_comp.mat', 'interferometer', 'encoder', 'u', 't'); interferometer = detrend(interferometer, 0);
encoder = detrend(encoder, 0);
u = detrend(u, 0);Time Domain Results
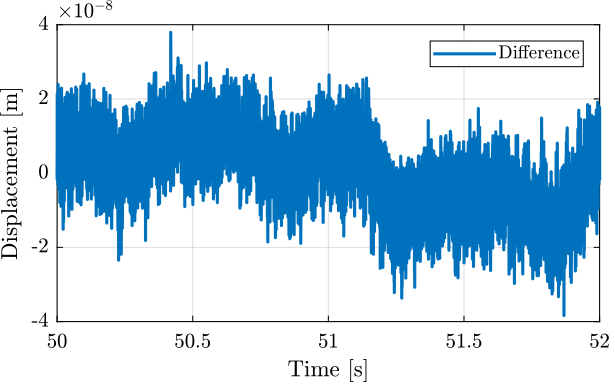
Difference between Encoder and Interferometer as a function of time
Ts = 1e-4;
d_i_mean = reshape(interferometer, [2/Ts floor(Ts/2*length(interferometer))]);
d_e_mean = reshape(encoder, [2/Ts floor(Ts/2*length(encoder))]); w0 = 2*pi*5; % [rad/s]
xi = 0.7;
G_lpf = 1/(1 + 2*xi/w0*s + s^2/w0^2);
d_err_mean = reshape(lsim(G_lpf, encoder - interferometer, t), [2/Ts floor(Ts/2*length(encoder))]);
d_err_mean = d_err_mean - mean(d_err_mean);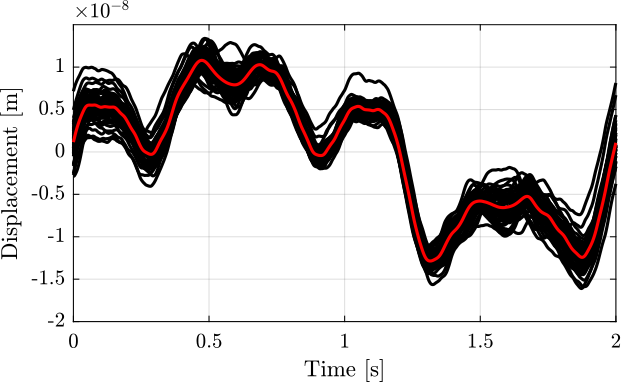
Difference between Encoder and Interferometer as a function of position
Compute the mean of the interferometer measurement corresponding to each of the encoder measurement.
[e_sorted, ~, e_ind] = unique(encoder);
i_mean = zeros(length(e_sorted), 1);
for i = 1:length(e_sorted)
i_mean(i) = mean(interferometer(e_ind == i));
end
i_mean_error = (i_mean - e_sorted);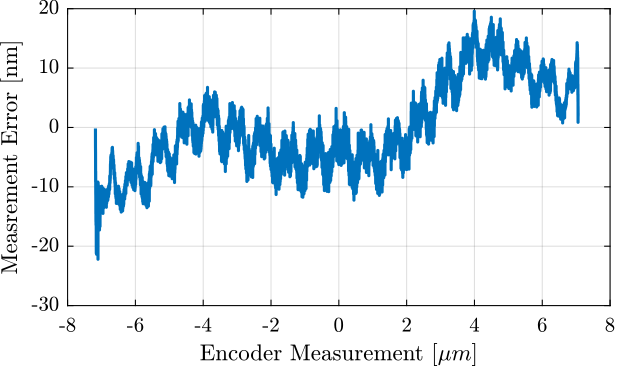
The period of the non-linearity seems to be $1.53 \mu m$ which corresponds to the wavelength of the Laser.
win_length = 1530; % length of the windows (corresponds to 1.53 um)
num_avg = floor(length(e_sorted)/win_length); % number of averaging
i_init = ceil((length(e_sorted) - win_length*num_avg)/2); % does not start at the extremity
e_sorted_mean_over_period = mean(reshape(i_mean_error(i_init:i_init+win_length*num_avg-1), [win_length num_avg]), 2);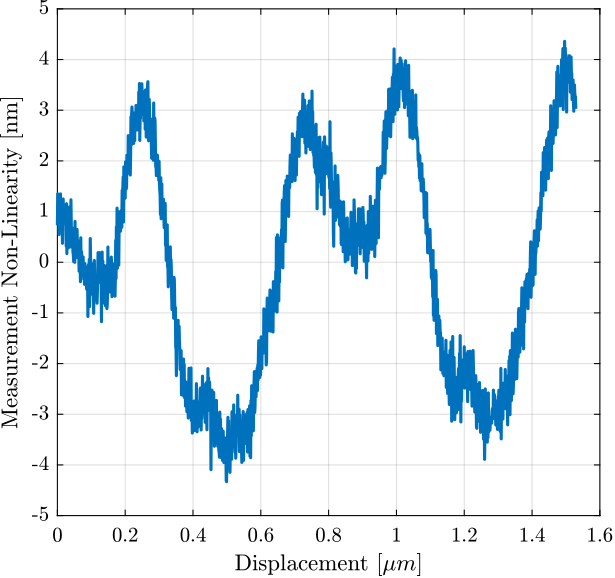
Identification
Load Data
load('mat/int_enc_id_noise_bis.mat', 'interferometer', 'encoder', 'u', 't'); interferometer = detrend(interferometer, 0);
encoder = detrend(encoder, 0);
u = detrend(u, 0);Identification
Ts = 1e-4; % Sampling Time [s]
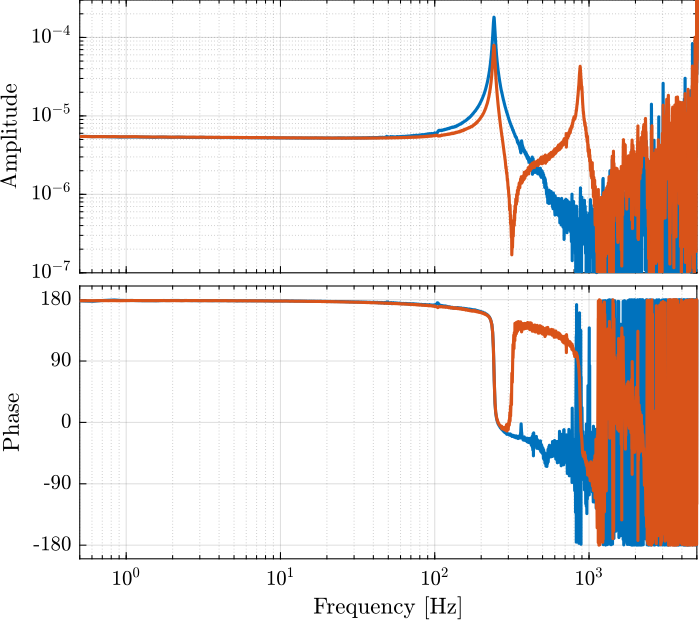
win = hann(ceil(10/Ts)); [tf_i_est, f] = tfestimate(u, interferometer, win, [], [], 1/Ts);
[co_i_est, ~] = mscohere(u, interferometer, win, [], [], 1/Ts);
[tf_e_est, ~] = tfestimate(u, encoder, win, [], [], 1/Ts);
[co_e_est, ~] = mscohere(u, encoder, win, [], [], 1/Ts);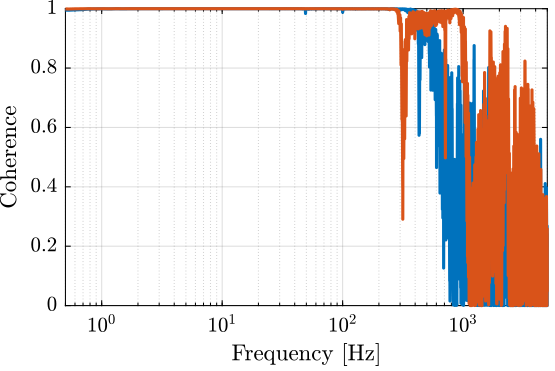
Change of Stiffness due to Sensors stack being open/closed circuit
Load Data
oc = load('./mat/identification_open_circuit.mat', 't', 'encoder', 'u');
sc = load('./mat/identification_short_circuit.mat', 't', 'encoder', 'u');Transfer Functions
Ts = 1e-4; % Sampling Time [s]
win = hann(ceil(10/Ts)); [tf_oc_est, f] = tfestimate(oc.u, oc.encoder, win, [], [], 1/Ts);
[co_oc_est, ~] = mscohere( oc.u, oc.encoder, win, [], [], 1/Ts);
[tf_sc_est, ~] = tfestimate(sc.u, sc.encoder, win, [], [], 1/Ts);
[co_sc_est, ~] = mscohere( sc.u, sc.encoder, win, [], [], 1/Ts);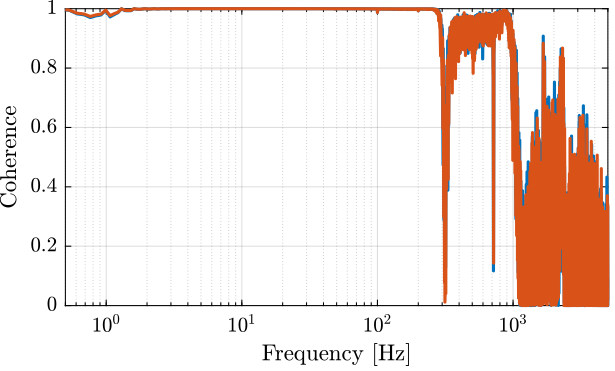
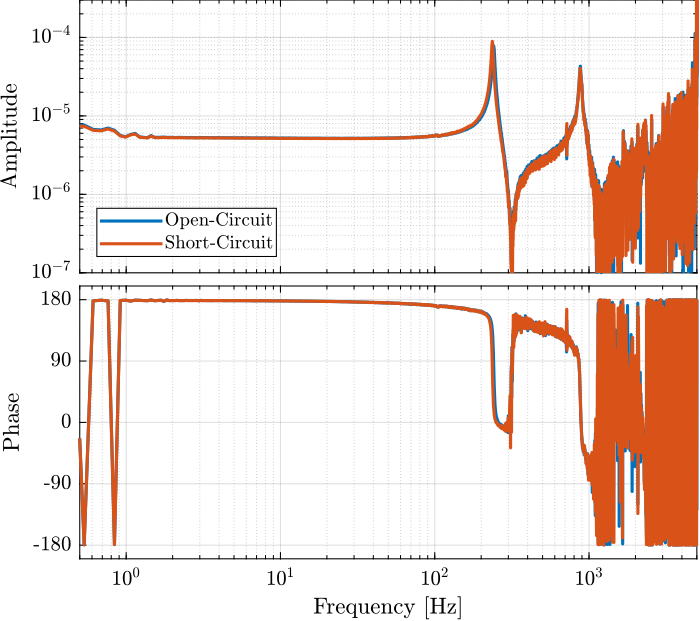
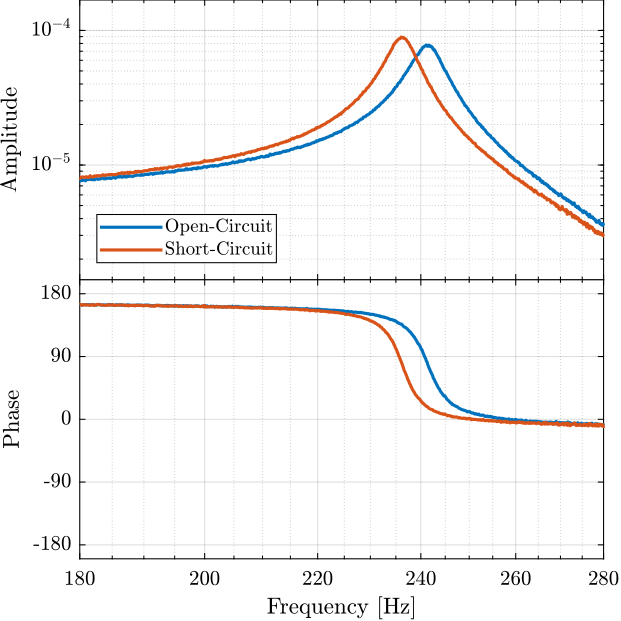
The change of resonance frequency / stiffness is very small and is not important here.
Generated Number of Charge / Voltage
Introduction ignore
Two stacks are used as actuator (in parallel) and one stack is used as sensor.
The amplifier gain is 20V/V (Cedrat LA75B).
Steps
load('./mat/force_sensor_steps.mat', 't', 'encoder', 'u', 'v'); figure;
tiledlayout(2, 1, 'TileSpacing', 'None', 'Padding', 'None');
nexttile;
plot(t, v);
xlabel('Time [s]'); ylabel('Measured voltage [V]');
nexttile;
plot(t, u);
xlabel('Time [s]'); ylabel('Actuator Voltage [V]');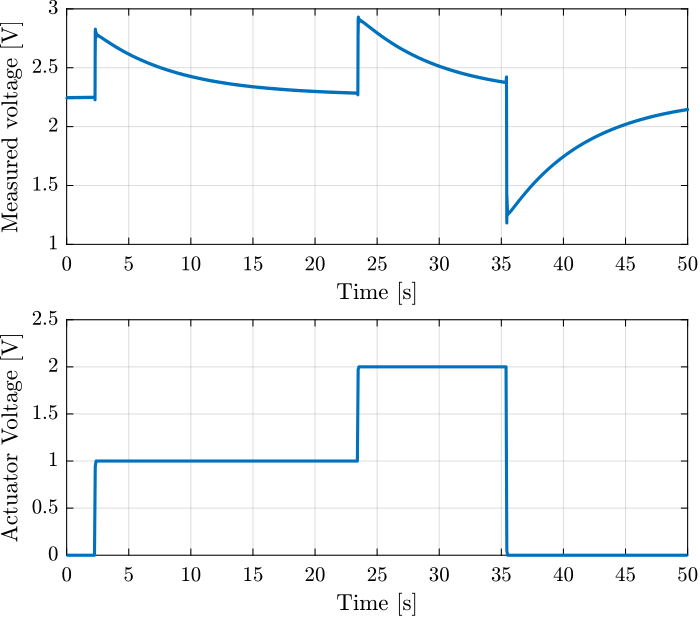
Three steps are performed at the following time intervals:
t_s = [ 2.5, 23;
23.8, 35;
35.8, 50];Fit function:
f = @(b,x) b(1).*exp(b(2).*x) + b(3);
We are interested by the b(2) term, which is the time constant of the exponential.
tau = zeros(size(t_s, 1),1);
V0 = zeros(size(t_s, 1),1); for t_i = 1:size(t_s, 1)
t_cur = t(t_s(t_i, 1) < t & t < t_s(t_i, 2));
t_cur = t_cur - t_cur(1);
y_cur = v(t_s(t_i, 1) < t & t < t_s(t_i, 2));
nrmrsd = @(b) norm(y_cur - f(b,t_cur)); % Residual Norm Cost Function
B0 = [0.5, -0.15, 2.2]; % Choose Appropriate Initial Estimates
[B,rnrm] = fminsearch(nrmrsd, B0); % Estimate Parameters ‘B’
tau(t_i) = 1/B(2);
V0(t_i) = B(3);
end| $tau$ [s] | $V_0$ [V] |
|---|---|
| 6.47 | 2.26 |
| 6.76 | 2.26 |
| 6.49 | 2.25 |
With the capacitance being $C = 4.4 \mu F$, the internal impedance of the Speedgoat ADC can be computed as follows:
Cp = 4.4e-6; % [F]
Rin = abs(mean(tau))/Cp;1494100.0
The input impedance of the Speedgoat's ADC should then be close to $1.5\,M\Omega$ (specified at $1\,M\Omega$).
How can we explain the voltage offset?
As shown in Figure fig:piezo_sensor_model_instrumentation (taken from cite:reza06_piezoel_trans_vibrat_contr_dampin), an input voltage offset is due to the input bias current $i_n$.
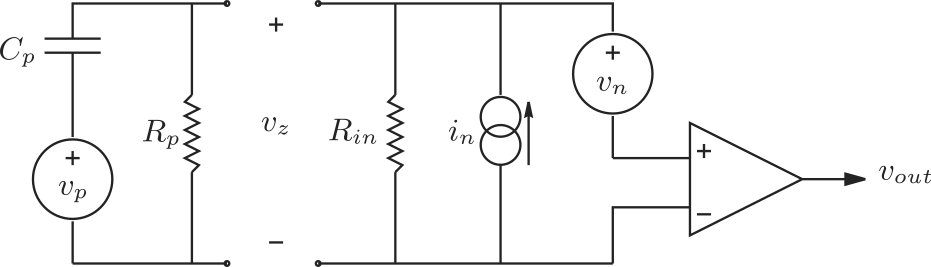
The estimated input bias current is then:
in = mean(V0)/Rin;1.5119e-06
An additional resistor in parallel with $R_{in}$ would have two effects:
- reduce the input voltage offset \[ V_{off} = \frac{R_a R_{in}}{R_a + R_{in}} i_n \]
- increase the high pass corner frequency $f_c$ \[ C_p \frac{R_{in}R_a}{R_{in} + R_a} = \tau_c = \frac{1}{f_c} \] \[ R_a = \frac{R_i}{f_c C_p R_i - 1} \]
If we allow the high pass corner frequency to be equals to 3Hz:
fc = 3;
Ra = Rin/(fc*Cp*Rin - 1);79804
With this parallel resistance value, the voltage offset would be:
V_offset = Ra*Rin/(Ra + Rin) * in;0.11454
Which is much more acceptable.
Add Parallel Resistor
A resistor of $\approx 100\,k\Omega$ is added in parallel with the force sensor and the same kin.
load('./mat/force_sensor_steps_R_82k7.mat', 't', 'encoder', 'u', 'v'); figure;
tiledlayout(2, 1, 'TileSpacing', 'None', 'Padding', 'None');
nexttile;
plot(t, v);
xlabel('Time [s]'); ylabel('Measured voltage [V]');
nexttile;
plot(t, u);
xlabel('Time [s]'); ylabel('Actuator Voltage [V]');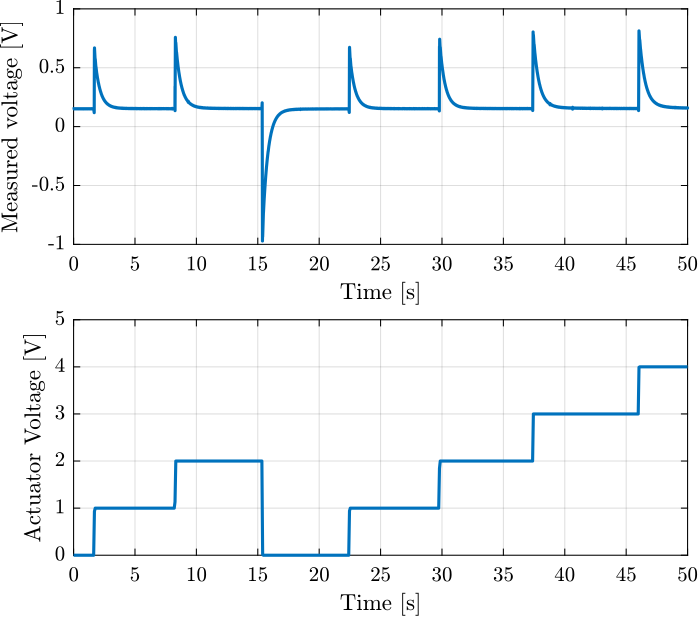
Three steps are performed at the following time intervals:
t_s = [1.9, 6;
8.5, 13;
15.5, 21;
22.6, 26;
30.0, 36;
37.5, 41;
46.2, 49.5]Fit function:
f = @(b,x) b(1).*exp(b(2).*x) + b(3);
We are interested by the b(2) term, which is the time constant of the exponential.
tau = zeros(size(t_s, 1),1);
V0 = zeros(size(t_s, 1),1); for t_i = 1:size(t_s, 1)
t_cur = t(t_s(t_i, 1) < t & t < t_s(t_i, 2));
t_cur = t_cur - t_cur(1);
y_cur = v(t_s(t_i, 1) < t & t < t_s(t_i, 2));
nrmrsd = @(b) norm(y_cur - f(b,t_cur)); % Residual Norm Cost Function
B0 = [0.5, -0.2, 0.2]; % Choose Appropriate Initial Estimates
[B,rnrm] = fminsearch(nrmrsd, B0); % Estimate Parameters ‘B’
tau(t_i) = 1/B(2);
V0(t_i) = B(3);
endAnd indeed, we obtain a much smaller offset voltage and a much faster time constant.
| $tau$ [s] | $V_0$ [V] |
|---|---|
| 0.43 | 0.15 |
| 0.45 | 0.16 |
| 0.43 | 0.15 |
| 0.43 | 0.15 |
| 0.45 | 0.15 |
| 0.46 | 0.16 |
| 0.48 | 0.16 |
Knowing the capacitance value, we can estimate the value of the added resistor (neglecting the input impedance of $\approx 1\,M\Omega$):
Cp = 4.4e-6; % [F]
Rin = abs(mean(tau))/Cp;101200.0
And we can verify that the bias current estimation stays the same:
in = mean(V0)/Rin;1.5305e-06
This validates the model of the ADC and the effectiveness of the added resistor.
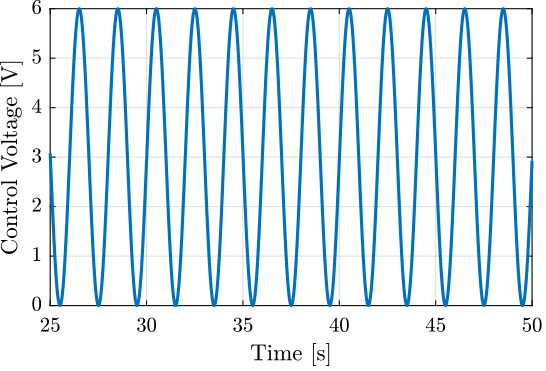
Sinus
load('./mat/force_sensor_sin.mat', 't', 'encoder', 'u', 'v');
u = u(t>25);
v = v(t>25);
encoder = encoder(t>25) - mean(encoder(t>25));
t = t(t>25);The driving voltage is a sinus at 0.5Hz centered on 3V and with an amplitude of 3V (Figure fig:force_sensor_sin_u).
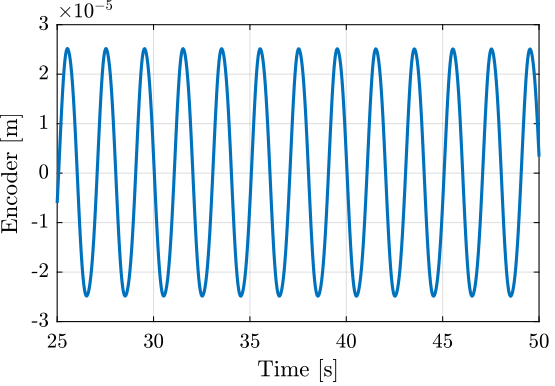
The full stroke as measured by the encoder is:
max(encoder)-min(encoder)5.005e-05
Its signal is shown in Figure fig:force_sensor_sin_encoder.
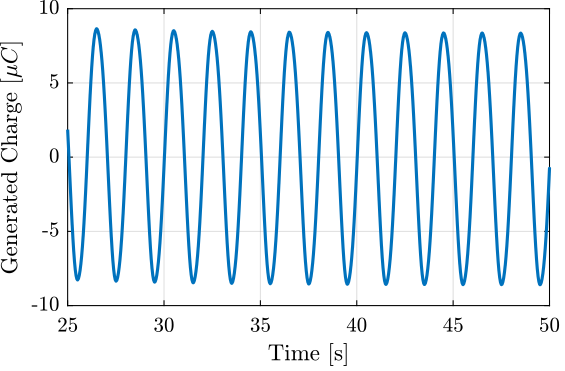
The generated voltage by the stack is shown in Figure
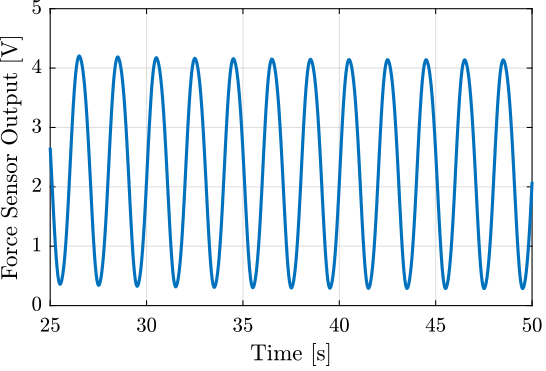
The capacitance of the stack is
Cp = 4.4e-6; % [F]The corresponding generated charge is then shown in Figure fig:force_sensor_sin_charge.
The relation between the generated voltage and the measured displacement is almost linear as shown in Figure fig:force_sensor_linear_relation.
b1 = encoder\(v-mean(v));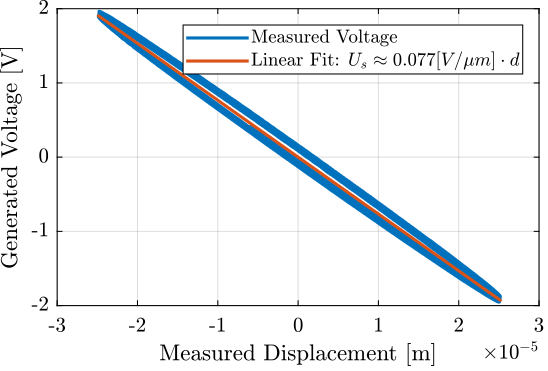
With a 16bits ADC, the resolution will then be equals to (in [nm]):
abs((20/2^16)/(b1/1e9))3.9838