7.8 KiB
MECHATRONICS APPROACH FOR THE DEVELOPMENT OF A NANO-ACTIVE-STABILIZATION-SYSTEM
ABSTRACT ignore
With the growing number of fourth generation light sources, there is an increased need of fast positioning end-stations with nanometric precision. Such systems are usually including dedicated control strategies, and many factors may limit their performances. In order to design such complex systems in a predictive way, a mechatronic design approach also known as "model based design", may be utilized. In this paper, we present how this mechatronic design approach was used for the development of a nano-hexapod for the ESRF ID31 beamline. The chosen design approach consists of using models of the mechatronic system (including sensors, actuators and control strategies) to predict its behavior. Based on this behavior and closed-loop simulations, the elements that are limiting the performances can be identified and re-designed accordingly. This allows to make adequate choices concerning the design of the nano-hexapod and the overall mechatronic architecture early in the project and save precious time and resources. Several test benches were used to validate the models and to gain confidence on the predictability of the final system's performances. Measured nano-hexapod's dynamics was shown to be in very good agreement with the models. Further tests should be done in order to confirm that the performances of the system match the predicted one. The presented development approach is foreseen to be applied more frequently to future mechatronic system design at the ESRF.
INTRODUCTION
See cite:dehaeze18_sampl_stabil_for_tomog_exper.
NANO ACTIVE STABILIZATION SYSTEM
MECHATRONIC APPROACH
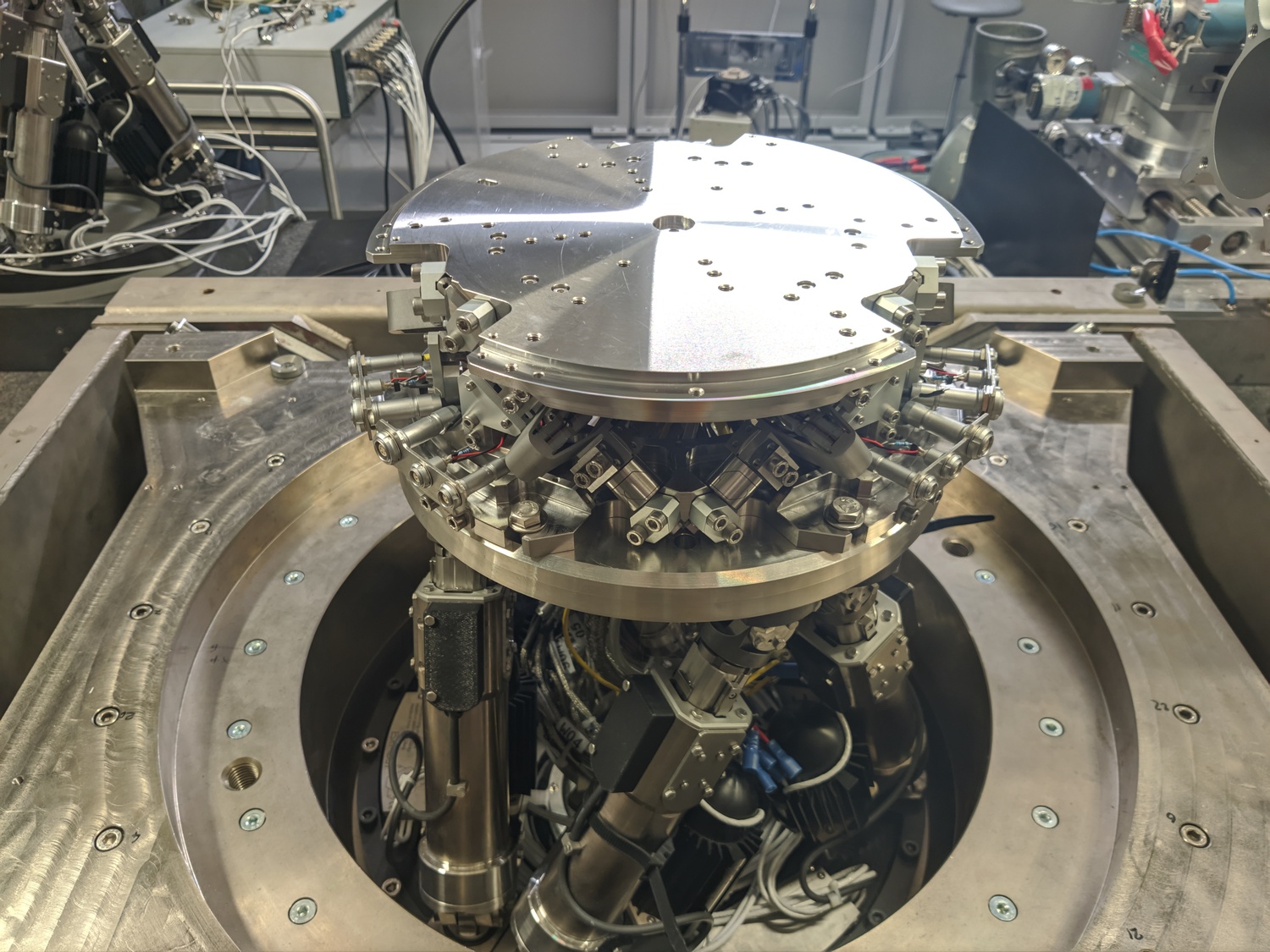
NANO-HEXAPOD DESIGN
TEST-BENCHES
CONTROL RESULTS
CONCLUSION
ACKNOWLEDGMENTS
This research was made possible by a grant from the FRIA. We thank the following people for their support, without whose help this work would never have been possible: V. Honkimaki, L. Ducotte and M. Lessourd and the whole team of the Precision Mechatronic Laboratory.
REFERENCES ignore
\printbibliography