40 KiB
hypersetup ignore
\hypersetup{allcolors=teal}
Abstract and Keywords ignore
Sensor have limited bandwidth and are accurate only in a certain frequency band. In many applications, the signals of different sensor are fused together in order to either enhance the stability or improve the operational bandwidth of the system. The sensor signals can be fused using complementary filters. The tuning of complementary filters is a complex task and is the subject of this paper. The filters needs to meet design specifications while satisfying the complementary property. This paper presents a framework to shape the norm of complementary filters using the $\mathcal{H}_\infty$ norm minimization. The design specifications are imposed as constraints in the optimization problem by appropriate selection of weighting functions. The proposed method is quite general and easily extendable to cases where more than two sensors are fused. Finally, the proposed method is applied to the design of complementary filter design for active vibration isolation of the Laser Interferometer Gravitation-wave Observatory (LIGO).
Sensor fusion \sep{} Optimal filters \sep{} $\mathcal{H}_\infty$ synthesis \sep{} Vibration isolation \sep{} Precision
Introduction
<<sec:introduction>>
New introduction ignore
Introduction to Sensor Fusion ignore
- cite:bendat57_optim_filter_indep_measur_two roots of sensor fusion
Advantages of Sensor Fusion ignore
- Increase the bandwidth: cite:zimmermann92_high_bandw_orien_measur_contr
- Increased robustness: cite:collette15_sensor_fusion_method_high_perfor
- Decrease the noise:
Applications ignore
- UAV: cite:pascoal99_navig_system_desig_using_time, cite:jensen13_basic_uas
- Gravitational wave observer: cite:hua05_low_ligo,hua04_polyp_fir_compl_filter_contr_system
Kalman Filtering or Complementary filters ignore
- cite:brown72_integ_navig_system_kalman_filter alternate form of complementary filters => Kalman filtering
- cite:higgins75_compar_compl_kalman_filter Compare Kalman Filtering with sensor fusion using complementary filters
- cite:robert12_introd_random_signal_applied_kalman advantage of complementary filters over Kalman filtering
Design Methods of Complementary filters ignore
- Analog complementary filters: cite:yong16_high_speed_vertic_posit_stage, cite:moore19_capac_instr_sensor_fusion_high_bandw_nanop
-
Analytical methods:
- first order: cite:corke04_inert_visual_sensin_system_small_auton_helic
- second order: cite:baerveldt97_low_cost_low_weigh_attit, cite:stoten01_fusion_kinet_data_using_compos_filter, cite:jensen13_basic_uas
- higher order: cite:shaw90_bandw_enhan_posit_measur_using_measur_accel, cite:zimmermann92_high_bandw_orien_measur_contr, cite:collette15_sensor_fusion_method_high_perfor, cite:matichard15_seism_isolat_advan_ligo
- cite:pascoal99_navig_system_desig_using_time use LMI to generate complementary filters
- cite:hua05_low_ligo,hua04_polyp_fir_compl_filter_contr_system: FIR + convex optimization
-
Similar to feedback system:
- cite:plummer06_optim_compl_filter_their_applic_motion_measur use H-Infinity to optimize complementary filters (flatten the super sensor noise spectral density)
- cite:jensen13_basic_uas design of complementary filters with classical control theory
- 3 complementary filters: cite:becker15_compl_filter_desig_three_frequen_bands
Problematics / gap in the research ignore
- Robustness problems: cite:zimmermann92_high_bandw_orien_measur_contr change of phase near the merging frequency
- Trial and error
- Although many design methods of complementary filters have been proposed in the literature, no simple method that allows to shape the norm of the complementary filters is available.
Describe the paper itself / the problem which is addressed ignore
Most of the requirements => shape of the complementary filters => propose a way to shape complementary filters.
Introduce Each part of the paper ignore
Complementary Filters Requirements
<<sec:requirements>>
Introduction ignore
Complementary filters provides a framework for fusing signals from different sensors. As the effectiveness of the fusion depends on the proper design of the complementary filters, they are expected to fulfill certain requirements. These requirements are discussed in this section.
Sensor Models
<<sec:sensor_models>>
- Noise + dynamics
- Suppose we calibrate the sensors
Sensor Fusion Architecture
<<sec:sensor_fusion>>
Let's consider two sensors measuring the same physical quantity $x$ with dynamics $G_1(s)$ and $G_2(s)$, and with uncorrelated noise characteristics $n_1$ and $n_2$.
The signals from both sensors are fed into two complementary filters $H_1(s)$ and $H_2(s)$ and then combined to yield an estimate $\hat{x}$ of $x$ as shown in Fig. ref:fig:fusion_super_sensor.
\begin{equation} \hat{x} = \left(G_1 H_1 + G_2 H_2\right) x + H_1 n_1 + H_2 n_2 \end{equation}The complementary property of $H_1(s)$ and $H_2(s)$ implies that their transfer function sum is equal to one at all frequencies eqref:eq:comp_filter.
\begin{equation} H_1(s) + H_2(s) = 1 \end{equation}Noise Sensor Filtering
<<sec:noise_filtering>>
Let's first consider sensors with perfect dynamics
\begin{equation} G_1(s) = G_2(s) = 1 \end{equation}The estimate $\hat{x}$ is then described by
\begin{equation} \hat{x} = x + H_1 n_1 + H_2 n_2 \end{equation}From eqref:eq:estimate_perfect_dyn, the complementary filters $H_1(s)$ and $H_2(s)$ are shown to only operate on the sensor's noise. Thus, this sensor fusion architecture permits to filter the noise of both sensors without introducing any distortion in the physical quantity to be measured.
Let's define the estimation error $\delta x$ by eqref:eq:estimate_error.
\begin{equation} \delta x \triangleq \hat{x} - x = H_1 n_1 + H_2 n_2 \end{equation}As shown in eqref:eq:noise_filtering_psd, the Power Spectral Density (PSD) of the estimation error $\Phi_{\delta x}$ depends both on the norm of the two complementary filters and on the PSD of the noise sources $\Phi_{n_1}$ and $\Phi_{n_2}$.
\begin{equation} \Phi_{\delta x} = \left|H_1\right|^2 \Phi_{n_1} + \left|H_2\right|^2 \Phi_{n_2} \end{equation}Usually, the two sensors have high noise levels over distinct frequency regions. In order to lower the noise of the super sensor, the value of the norm $|H_1|$ has to be lowered when $\Phi_{n_1}$ is larger than $\Phi_{n_2}$ and that of $|H_2|$ lowered when $\Phi_{n_2}$ is larger than $\Phi_{n_1}$.
Robustness of the Fusion
<<sec:fusion_robustness>>
In practical systems the sensor dynamics is not perfect and eqref:eq:perfect_dynamics is not verified. In such case, one can use an inversion filter $\hat{G}_i^{-1}(s)$ to normalize the sensor dynamics, where $\hat{G}_i(s)$ is an estimate of the sensor dynamics $G_i(s)$. However, as there is always some level of uncertainty on the dynamics, it cannot be perfectly inverted and $\hat{G}_i^{-1}(s) G_i(s) \neq 1$.
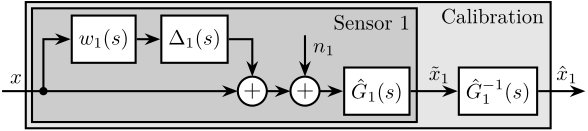

Let's represent the resulting dynamic uncertainty of the inverted sensors by an input multiplicative uncertainty as shown in Fig. ref:fig:sensor_fusion_dynamic_uncertainty where $\Delta_i$ is any stable transfer function satisfying $|\Delta_i(j\omega)| \le 1,\ \forall\omega$, and $|w_i(s)|$ is a weight representing the magnitude of the uncertainty.
The super sensor dynamics eqref:eq:super_sensor_dyn_uncertainty is no longer equal to $1$ and now depends on the sensor dynamics uncertainty weights $w_i(s)$ as well as on the complementary filters $H_i(s)$.
\begin{equation} \frac{\hat{x}}{x} = 1 + w_1(s) H_1(s) \Delta_1(s) + w_2(s) H_2(s) \Delta_2(s) \end{equation}The uncertainty region of the super sensor can be represented in the complex plane by a circle centered on $1$ with a radius equal to $|w_1(j\omega) H_1(j\omega)| + |w_2(j\omega) H_2(j\omega)|$ as shown in Fig. ref:fig:uncertainty_set_super_sensor.
The maximum phase added $\Delta\phi(\omega)$ by the super sensor dynamics at frequency $\omega$ is then
\begin{equation} \Delta\phi(\omega) = \arcsin\big( |w_1(j\omega) H_1(j\omega)| + |w_2(j\omega) H_2(j\omega)| \big) \end{equation}As it is generally desired to limit the maximum phase added by the super sensor, $H_1(s)$ and $H_2(s)$ should be designed such that eqref:eq:max_uncertainty_super_sensor is satisfied.
\begin{equation} \max_\omega \big( \left|w_1 H_1\right| + \left|w_2 H_2\right|\big) < \sin\left( \Delta \phi_\text{max} \right) \end{equation}where $\Delta \phi_\text{max}$ is the maximum allowed added phase.
Thus the norm of the complementary filter $|H_i|$ should be made small at frequencies where $|w_i|$ is large.
Complementary Filters Shaping using $\mathcal{H}_\infty$ Synthesis
<<sec:hinf_method>>
Introduction ignore
As shown in Sec. ref:sec:requirements, the performance and robustness of the sensor fusion architecture depends on the complementary filters norms. Therefore, the development of a synthesis method of complementary filters that allows the shaping of their norm is necessary.
Synthesis Objective
<<sec:synthesis_objective>> The synthesis objective is to shape the norm of two filters $H_1(s)$ and $H_2(s)$ while ensuring their complementary property eqref:eq:comp_filter. This is equivalent as to finding stable transfer functions $H_1(s)$ and $H_2(s)$ such that conditions eqref:eq:comp_filter_problem_form are satisfied.
\begin{subequations} \begin{align} & H_1(s) + H_2(s) = 1 \label{eq:hinf_cond_complementarity} \\ & |H_1(j\omega)| \le \frac{1}{|W_1(j\omega)|} \quad \forall\omega \label{eq:hinf_cond_h1} \\ & |H_2(j\omega)| \le \frac{1}{|W_2(j\omega)|} \quad \forall\omega \label{eq:hinf_cond_h2} \end{align} \end{subequations}where $W_1(s)$ and $W_2(s)$ are two weighting transfer functions that are chosen to shape the norms of the corresponding filters.
Shaping of Complementary Filters using $\mathcal{H}_\infty$ synthesis
<<sec:hinf_synthesis>> In order to express this optimization problem as a standard $\mathcal{H}_\infty$ problem, the architecture shown in Fig. ref:fig:h_infinity_robust_fusion is used where the generalized plant $P$ is described by eqref:eq:generalized_plant.
\begin{equation} \begin{bmatrix} z_1 \\ z_2 \\ v \end{bmatrix} = P(s) \begin{bmatrix} w\\u \end{bmatrix}; \quad P(s) = \begin{bmatrix}W_1(s) & -W_1(s) \\ 0 & W_2(s) \\ 1 & 0 \end{bmatrix} \end{equation}The $\mathcal{H}_\infty$ filter design problem is then to find a stable filter $H_2(s)$ which based on $v$, generates a signal $u$ such that the $\mathcal{H}_\infty$ norm from $w$ to $[z_1, \ z_2]$ is less than one eqref:eq:hinf_syn_obj.
\begin{equation} \left\|\begin{matrix} \left[1 - H_2(s)\right] W_1(s) \\ H_2(s) W_2(s) \end{matrix}\right\|_\infty \le 1 \end{equation}This is equivalent to having eqref:eq:hinf_problem by defining $H_1(s)$ as the complementary filter of $H_2(s)$ eqref:eq:definition_H1.
\begin{equation} \left\|\begin{matrix} H_1(s) W_1(s) \\ H_2(s) W_2(s) \end{matrix}\right\|_\infty \le 1 \end{equation} \begin{equation} H_1(s) \triangleq 1 - H_2(s) \end{equation}The complementary condition eqref:eq:hinf_cond_complementarity is ensured by eqref:eq:definition_H1. The conditions eqref:eq:hinf_cond_h1 and eqref:eq:hinf_cond_h2 on the filters shapes are satisfied by eqref:eq:hinf_problem. Therefore, all the conditions eqref:eq:comp_filter_problem_form are satisfied using this synthesis method based on $\mathcal{H}_\infty$ synthesis, and thus it permits to shape complementary filters as desired.
Weighting Functions Design
<<sec:hinf_weighting_func>> The proper design of the weighting functions is of primary importance for the success of the presented complementary filters $\mathcal{H}_\infty$ synthesis.
First, only proper, stable and minimum phase transfer functions should be used. Second, the order of the weights should stay reasonably small in order to reduce the computational costs associated with the solving of the optimization problem and for the physical implementation of the filters (the order of the synthesized filters being equal to the sum of the weighting functions order). Third, one should not forget the fundamental limitations imposed by the complementary property eqref:eq:comp_filter. This implies for instance that $|H_1(j\omega)|$ and $|H_2(j\omega)|$ cannot be made small at the same time.
When designing complementary filters, it is usually desired to specify the slope of the filter, its crossover frequency and its gain at low and high frequency. To help with the design of the weighting functions such that the above specification can be easily expressed, the following formula is proposed.
\begin{equation} W(s) = \left( \frac{ \hfill{} \frac{1}{\omega_0} \sqrt{\frac{1 - \left(\frac{G_0}{G_c}\right)^{\frac{2}{n}}}{1 - \left(\frac{G_c}{G_\infty}\right)^{\frac{2}{n}}}} s + \left(\frac{G_0}{G_c}\right)^{\frac{1}{n}} }{ \left(\frac{1}{G_\infty}\right)^{\frac{1}{n}} \frac{1}{\omega_0} \sqrt{\frac{1 - \left(\frac{G_0}{G_c}\right)^{\frac{2}{n}}}{1 - \left(\frac{G_c}{G_\infty}\right)^{\frac{2}{n}}}} s + \left(\frac{1}{G_c}\right)^{\frac{1}{n}} }\right)^n \end{equation}The parameters permit to specify:
- the low frequency gain: $G_0 = lim_{\omega \to 0} |W(j\omega)|$
- the high frequency gain: $G_\infty = lim_{\omega \to \infty} |W(j\omega)|$
- the absolute gain at $\omega_0$: $G_c = |W(j\omega_0)|$
- the absolute slope between high and low frequency: $n$
The parameters $G_0$, $G_c$ and $G_\infty$ should either satisfy condition eqref:eq:cond_formula_1 or eqref:eq:cond_formula_2.
\begin{subequations} \begin{align} G_0 < 1 < G_\infty \text{ and } G_0 < G_c < G_\infty \label{eq:cond_formula_1}\\ G_\infty < 1 < G_0 \text{ and } G_\infty < G_c < G_0 \label{eq:cond_formula_2} \end{align} \end{subequations}The general shape of a weighting function generated using eqref:eq:weight_formula is shown in Fig. ref:fig:weight_formula.
Validation of the proposed synthesis method
<<sec:hinf_example>> Let's validate the proposed design method of complementary filters with a simple example where two complementary filters $H_1(s)$ and $H_2(s)$ have to be designed such that:
- the merging frequency is around $\SI{10}{Hz}$
- the slope of $|H_1(j\omega)|$ is $-2$ above $\SI{10}{Hz}$
- the slope of $|H_2(j\omega)|$ is $+3$ below $\SI{10}{Hz}$
- the gain of both filters is equal to $10^{-3}$ away from the merging frequency
The weighting functions $W_1(s)$ and $W_2(s)$ are designed using eqref:eq:weight_formula. The parameters used are summarized in table ref:tab:weights_params and the magnitude of the weighting functions is shown in Fig. ref:fig:hinf_filters_results.
| Parameter | $W_1(s)$ | $W_2(s)$ |
|---|---|---|
| $G_0$ | $0.1$ | $1000$ |
| $G_\infty$ | $1000$ | $0.1$ |
| $\omega_c$ [$\si{Hz}$] | $11$ | $10$ |
| $G_c$ | $0.5$ | $0.5$ |
| $n$ | $2$ | $3$ |
The bode plots of the obtained complementary filters are shown in Fig. ref:fig:hinf_filters_results and their transfer functions in the Laplace domain are given below.
\begin{align*} H_1(s) &= \frac{10^{-8} (s+6.6e^9) (s+3450)^2 (s^2 + 49s + 895)}{(s+6.6e^4) (s^2 + 106 s + 3e^3) (s^2 + 72s + 3580)}\\ H_2(s) &= \frac{(s+6.6e^4) (s+160) (s+4)^3}{(s+6.6e^4) (s^2 + 106 s + 3e^3) (s^2 + 72s + 3580)} \end{align*}Application: Design of Complementary Filters used in the Active Vibration Isolation System at the LIGO
<<sec:application_ligo>>
Introduction ignore
Several complementary filters are used in the active isolation system at the LIGO cite:hua05_low_ligo,hua04_polyp_fir_compl_filter_contr_system. The requirements on those filters are very tight and thus their design is complex. The approach used in cite:hua05_low_ligo for their design is to write the synthesis of complementary FIR filters as a convex optimization problem. The obtained FIR filters are compliant with the requirements. However they are of very high order so their implementation is quite complex.
The effectiveness of the proposed method is demonstrated by designing complementary filters with the same requirements as the one described in cite:hua05_low_ligo.
Complementary Filters Specifications
<<sec:ligo_specifications>> The specifications for one pair of complementary filters used at the LIGO are summarized below (for further details, refer to cite:hua04_polyp_fir_compl_filter_contr_system) and shown in Fig. ref:fig:ligo_weights:
- From $0$ to $\SI{0.008}{Hz}$, the magnitude of the filter's transfer function should be less or equal to $8 \times 10^{-4}$
- Between $\SI{0.008}{Hz}$ to $\SI{0.04}{Hz}$, the filter should attenuate the input signal proportional to frequency cubed
- Between $\SI{0.04}{Hz}$ to $\SI{0.1}{Hz}$, the magnitude of the transfer function should be less than $3$
- Above $\SI{0.1}{Hz}$, the magnitude of the complementary filter should be less than $0.045$
Weighting Functions Design
<<sec:ligo_weights>> The weighting functions should be designed such that their inverse magnitude is as close as possible to the specifications in order to not over-constrain the synthesis problem. However, the order of each weight should stay reasonably small in order to reduce the computational costs of the optimization problem as well as for the physical implementation of the filters.
A Type I Chebyshev filter of order $20$ is used as the weighting transfer function $w_L(s)$ corresponding to the low pass filter. For the one corresponding to the high pass filter $w_H(s)$, a $7^{\text{th}}$ order transfer function is designed. The magnitudes of the weighting functions are shown in Fig. ref:fig:ligo_weights.
$\mathcal{H}_\infty$ Synthesis
<<sec:ligo_results>> $\mathcal{H}_\infty$ synthesis is performed using the architecture shown in Fig. ref:eq:generalized_plant. The complementary filters obtained are of order $27$. In Fig. ref:fig:comp_fir_ligo_hinf, their bode plot is compared with the FIR filters of order 512 obtained in cite:hua05_low_ligo. They are found to be very close to each other and this shows the effectiveness of the proposed synthesis method.
Conclusion
<<sec:conclusion>> This paper has shown how complementary filters can be used to combine multiple sensors in order to obtain a super sensor. Typical specification on the super sensor noise and on the robustness of the sensor fusion has been shown to be linked to the norm of the complementary filters. Therefore, a synthesis method that permits the shaping of the complementary filters norms has been proposed and has been successfully applied for the design of complex filters. Future work will aim at further developing this synthesis method for the robust and optimal synthesis of complementary filters used in sensor fusion.
Acknowledgment
This research benefited from a FRIA grant from the French Community of Belgium.
Bibliography ignore
\bibliographystyle{elsarticle-num} \bibliography{ref}