8.3 KiB
ESRF Double Crystal Monochromator - Lookup Tables
This report is also available as a pdf.
Introduction
Stepper Motors Calibration
<<sec:dcm_stepper_lut>>
Introduction ignore
Schematic
Simulation
In this section, we suppose that we are in the frame of one fast jack (all transformations are already done), and we wish to create a LUT for one fast jack.
Let's say with make a Bragg angle scan between 10deg and 60deg during 100s.
Fs = 10e3; % Sample Frequency [Hz]
t = 0:1/Fs:100; % Time vector [s]
theta = linspace(10, 60, length(t)); % Bragg Angle [deg]The IcePAP steps are following the theoretical formula:
\begin{equation} d_z = \frac{d_{\text{off}}}{2 \cos \theta} \end{equation}with $\theta$ the bragg angle and $d_{\text{off}} = 10\,mm$.
The motion to follow is then:
perfect_motion = 10e-3./(2*cos(theta*pi/180)); % Perfect motion [m]And the IcePAP is generated those steps:
icepap_steps = perfect_motion; % IcePAP steps measured by Speedgoat [m]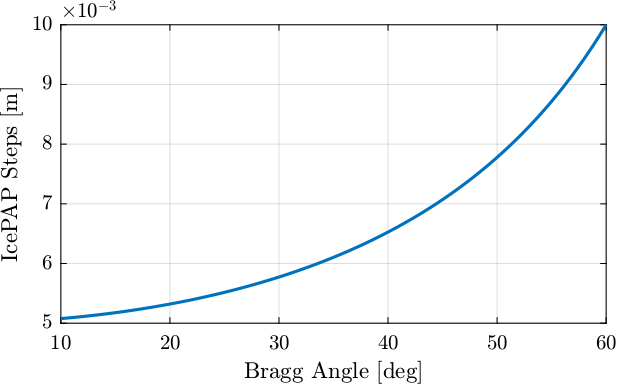
Then, we are measuring the motion of the Fast Jack using the Interferometer. The motion error is larger than in reality to be angle to see it more easily.
motion_error = 100e-6*sin(2*pi*perfect_motion/1e-3); % Error motion [m]
measured_motion = perfect_motion + motion_error; % Measured motion of the Fast Jack [m]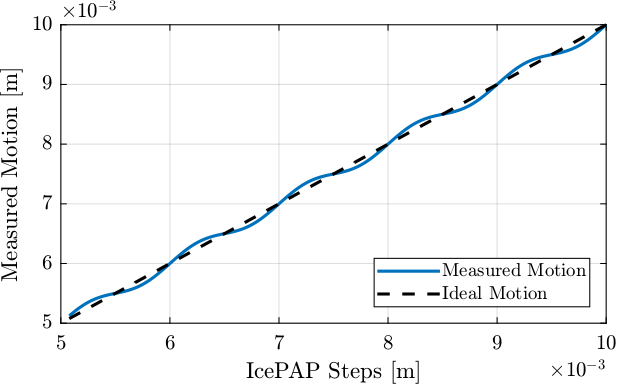
Let's now compute the lookup table. For each micrometer of the IcePAP step, another step is associated that correspond to a position closer to the wanted position.
%% Get range for the LUT
% We correct only in the range of tested/measured motion
lut_range = round(1e6*min(icepap_steps)):round(1e6*max(icepap_steps)); % IcePAP steps [um]
%% Initialize the LUT
lut = zeros(size(lut_range));
%% For each um in this range
for i = 1:length(lut_range)
% Get points indices where the measured motion is closed to the wanted one
close_points = measured_motion > 1e-6*lut_range(i) - 500e-9 & measured_motion < 1e-6*lut_range(i) + 500e-9;
% Get the corresponding closest IcePAP step
lut(i) = round(1e6*mean(icepap_steps(close_points))); % [um]
end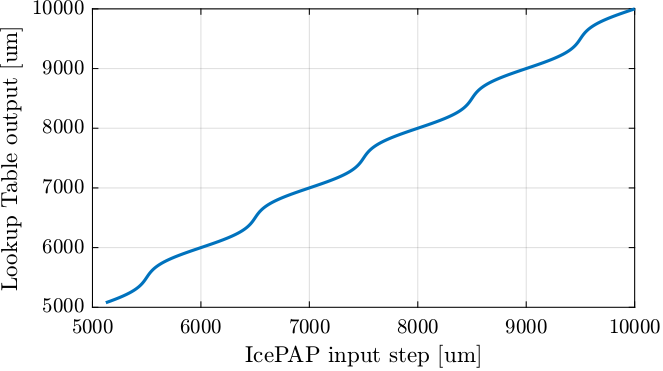
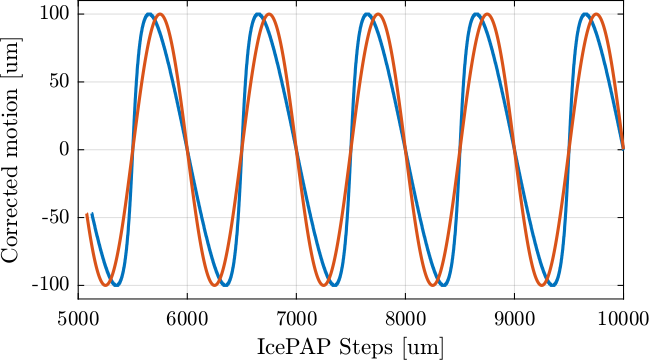
We can see that the LUT is not the motion error (Figure fig:lut_correct_and_motion_error).
motion_error_lut = zeros(size(lut_range));
for i = 1:length(lut_range)
% Get points indices where the icepap step is close to the wanted one
close_points = icepap_steps > 1e-6*lut_range(i) - 500e-9 & icepap_steps < 1e-6*lut_range(i) + 500e-9;
% Get the corresponding motion error
motion_error_lut(i) = lut_range(i) - 1e6*mean(measured_motion(close_points)); % [um]
end