41 KiB
DCM - Dynamical Multi-Body Model
- Introduction
- System Kinematics
- Open Loop System Identification
- Active Damping Plant (Strain gauges)
- Active Damping Plant (Force Sensors)
- HAC-LAC (IFF) architecture
- Bibliography
This report is also available as a pdf.
Introduction ignore
In this document, a Simscape (.e.g. multi-body) model of the ESRF Double Crystal Monochromator (DCM) is presented and used to develop and optimize the control strategy.
It is structured as follow:
- Section sec:dcm_kinematics: the kinematics of the DCM is presented, and Jacobian matrices which are used to solve the inverse and forward kinematics are computed.
- Section sec:open_loop_identification: the system dynamics is identified in the absence of control.
- Section sec:active_damping_strain_gauges: it is studied whether if the strain gauges fixed to the piezoelectric actuators can be used to actively damp the plant.
- Section sec:active_damping_iff: piezoelectric force sensors are added in series with the piezoelectric actuators and are used to actively damp the plant using the Integral Force Feedback (IFF) control strategy.
- Section sec:hac_iff: the High Authority Control - Low Authority Control (HAC-LAC) strategy is tested on the Simscape model.
System Kinematics
<<sec:dcm_kinematics>>
Introduction ignore
Bragg Angle
%% Tested bragg angles
bragg = linspace(5, 80, 1000); % Bragg angle [deg]
d_off = 10.5e-3; % Wanted offset between x-rays [m]%% Vertical Jack motion as a function of Bragg angle
dz = d_off./(2*cos(bragg*pi/180));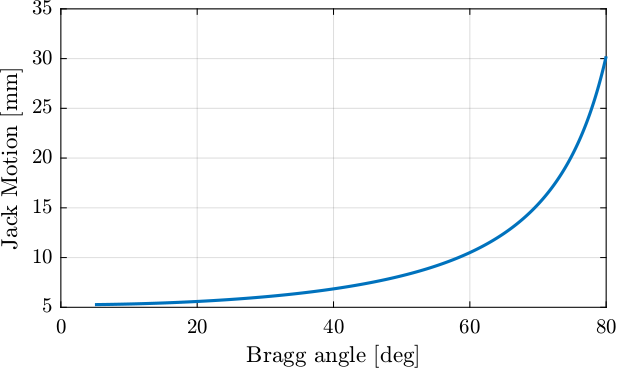
%% Required Jack stroke
ans = 1e3*(dz(end) - dz(1))24.963
Kinematics (111 Crystal)
Introduction ignore
The reference frame is taken at the center of the 111 second crystal.
Interferometers - 111 Crystal
Three interferometers are pointed to the bottom surface of the 111 crystal.
The position of the measurement points are shown in Figure fig:sensor_111_crystal_points as well as the origin where the motion of the crystal is computed.
\begin{tikzpicture}
% Crystal
\draw (-15/2, -3.5/2) rectangle (15/2, 3.5/2);
% Measurement Points
\node[branch] (a1) at (-7, 1.5){};
\node[branch] (a2) at ( 0, -1.5){};
\node[branch] (a3) at ( 7, 1.5){};
% Labels
\node[right] at (a1) {$\mathcal{O}_1 = (-0.07, -0.015)$};
\node[right] at (a2) {$\mathcal{O}_2 = (0, 0.015)$};
\node[left] at (a3) {$\mathcal{O}_3 = ( 0.07, -0.015)$};
% Origin
\draw[->] (0, 0) node[] -- ++(1, 0) node[right]{$x$};
\draw[->] (0, 0) -- ++(0, -1) node[below]{$y$};
\draw[fill, color=black] (0, 0) circle (0.05);
\node[left] at (0,0) {$\mathcal{O}_{111}$};
\end{tikzpicture}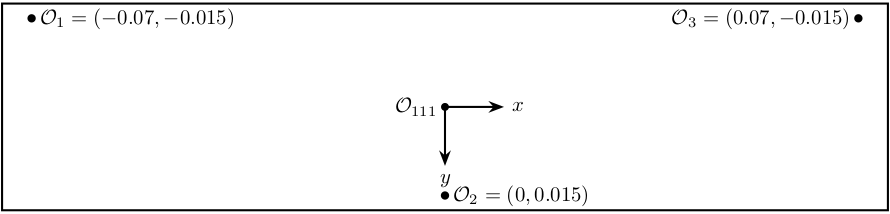
The inverse kinematics consisting of deriving the interferometer measurements from the motion of the crystal (see Figure fig:schematic_sensor_jacobian_inverse_kinematics):
\begin{equation} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \bm{J}_{s,111} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} \end{equation}\begin{tikzpicture}
% Blocs
\node[block] (Js) {$\bm{J}_{s,111}$};
% Connections and labels
\draw[->] ($(Js.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix}$} -- (Js.west);
\draw[->] (Js.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix}$};
\end{tikzpicture}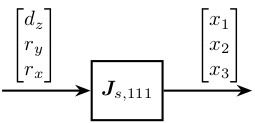
From the Figure fig:sensor_111_crystal_points, the inverse kinematics can be solved as follow (for small motion):
\begin{equation} \bm{J}_{s,111} = \begin{bmatrix} 1 & 0.07 & -0.015 \\ 1 & 0 & 0.015 \\ 1 & -0.07 & -0.015 \end{bmatrix} \end{equation}%% Sensor Jacobian matrix for 111 crystal
J_s_111 = [1, 0.07, -0.015
1, 0, 0.015
1, -0.07, -0.015];| 1.0 | 0.07 | -0.015 |
| 1.0 | 0.0 | 0.015 |
| 1.0 | -0.07 | -0.015 |
The forward kinematics is solved by inverting the Jacobian matrix (see Figure fig:schematic_sensor_jacobian_forward_kinematics).
\begin{equation} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} = \bm{J}_{s,111}^{-1} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} \end{equation}\begin{tikzpicture}
% Blocs
\node[block] (Js_inv) {$\bm{J}_{s,111}^{-1}$};
% Connections and labels
\draw[->] ($(Js_inv.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix}$} -- (Js_inv.west);
\draw[->] (Js_inv.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix}$};
\end{tikzpicture}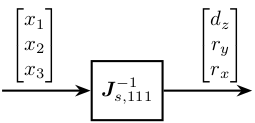
| 0.25 | 0.5 | 0.25 |
| 7.14 | 0.0 | -7.14 |
| -16.67 | 33.33 | -16.67 |
Piezo - 111 Crystal
The location of the actuators with respect with the center of the 111 second crystal are shown in Figure fig:actuator_jacobian_111_points.
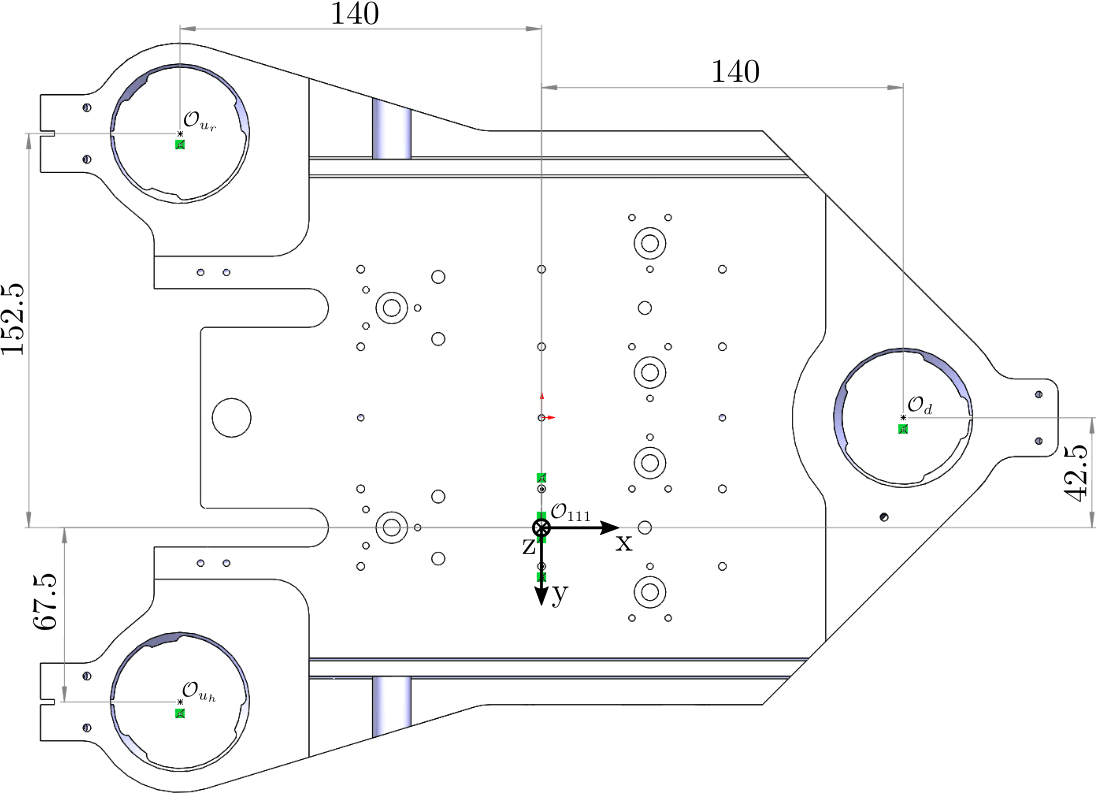
Inverse Kinematics consist of deriving the axial (z) motion of the 3 actuators from the motion of the crystal's center.
\begin{equation} \begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_{d} \end{bmatrix} = \bm{J}_{a,111} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} \end{equation}\begin{tikzpicture}
% Blocs
\node[block] (Ja) {$\bm{J}_{a,111}$};
% Connections and labels
\draw[->] ($(Ja.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix}$} -- (Ja.west);
\draw[->] (Ja.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_d \end{bmatrix}$};
\end{tikzpicture}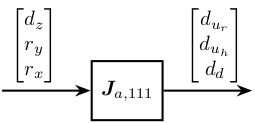
Based on the geometry in Figure fig:actuator_jacobian_111_points, we obtain:
\begin{equation} \bm{J}_{a,111} = \begin{bmatrix} 1 & 0.14 & -0.1525 \\ 1 & 0.14 & 0.0675 \\ 1 & -0.14 & -0.0425 \end{bmatrix} \end{equation}%% Actuator Jacobian - 111 crystal
J_a_111 = [1, 0.14, -0.1525
1, 0.14, 0.0675
1, -0.14, -0.0425];| 1.0 | 0.14 | -0.1525 |
| 1.0 | 0.14 | 0.0675 |
| 1.0 | -0.14 | -0.0425 |
The forward Kinematics is solved by inverting the Jacobian matrix:
\begin{equation} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} = \bm{J}_{a,111}^{-1} \begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_{d} \end{bmatrix} \end{equation}\begin{tikzpicture}
% Blocs
\node[block] (Ja_inv) {$\bm{J}_{a,111}^{-1}$};
% Connections and labels
\draw[->] ($(Ja_inv.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_d \end{bmatrix}$} -- (Ja_inv.west);
\draw[->] (Ja_inv.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix}$};
\end{tikzpicture}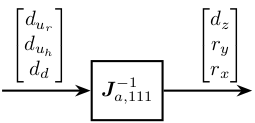
| 0.0568 | 0.4432 | 0.5 |
| 1.7857 | 1.7857 | -3.5714 |
| -4.5455 | 4.5455 | 0.0 |
Save Kinematics
save('mat/dcm_kinematics.mat', 'J_a_111', 'J_s_111')Open Loop System Identification
<<sec:open_loop_identification>>
Introduction ignore
Identification
Let's considered the system $\bm{G}(s)$ with:
- 3 inputs: force applied to the 3 fast jacks
- 3 outputs: measured displacement by the 3 interferometers pointing at the 111 second crystal
It is schematically shown in Figure fig:schematic_system_inputs_outputs.
\begin{tikzpicture}
% Blocs
\node[block] (G) {$\bm{G}(s)$};
% Connections and labels
\draw[->] ($(G.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} u_{u_r} \\ u_{u_h} \\ u_d \end{bmatrix}$} -- (G.west);
\draw[->] (G.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix}$};
\end{tikzpicture}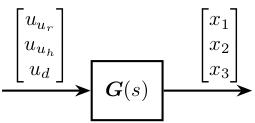
The system is identified from the Simscape model.
%% Input/Output definition
clear io; io_i = 1;
%% Inputs
% Control Input {3x1} [N]
io(io_i) = linio([mdl, '/control_system'], 1, 'openinput'); io_i = io_i + 1;
%% Outputs
% Interferometers {3x1} [m]
io(io_i) = linio([mdl, '/DCM'], 1, 'openoutput'); io_i = io_i + 1;%% Extraction of the dynamics
G = linearize(mdl, io);size(G)size(G) State-space model with 3 outputs, 3 inputs, and 24 states.
Plant in the frame of the fastjacks
load('mat/dcm_kinematics.mat');Using the forward and inverse kinematics, we can computed the dynamics from piezo forces to axial motion of the 3 fastjacks (see Figure fig:schematic_jacobian_frame_fastjack).
\begin{tikzpicture}
% Blocs
\node[block] (G) {$\bm{G}(s)$};
\node[block, right=1.5 of G] (Js) {$\bm{J}_{s}^{-1}$};
\node[block, right=1.5 of Js] (Ja) {$\bm{J}_{a}$};
% Connections and labels
\draw[->] ($(G.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} u_{u_r} \\ u_{u_h} \\ u_d \end{bmatrix}$} -- (G.west);
\draw[->] (G.east) -- node[midway, above]{$\begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix}$} (Js.west);
\draw[->] (Js.east) -- node[midway, above]{$\begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix}$} (Ja.west);
\draw[->] (Ja.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_{d} \end{bmatrix}$};
\begin{scope}[on background layer]
\node[fit={(G.south west) ($(Ja.east)+(0, 1.4)$)}, fill=black!20!white, draw, inner sep=6pt] (system) {};
\node[above] at (system.north) {$\bm{G}_{\text{fj}}(s)$};
\end{scope}
\end{tikzpicture}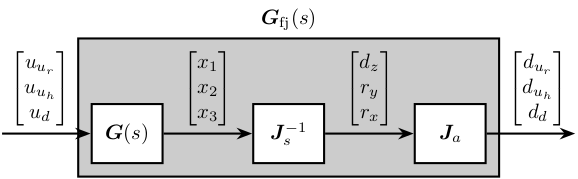
%% Compute the system in the frame of the fastjacks
G_pz = J_a_111*inv(J_s_111)*G;The DC gain of the new system shows that the system is well decoupled at low frequency.
dcgain(G_pz)| 4.4407e-09 | 2.7656e-12 | 1.0132e-12 |
| 2.7656e-12 | 4.4407e-09 | 1.0132e-12 |
| 1.0109e-12 | 1.0109e-12 | 4.4424e-09 |
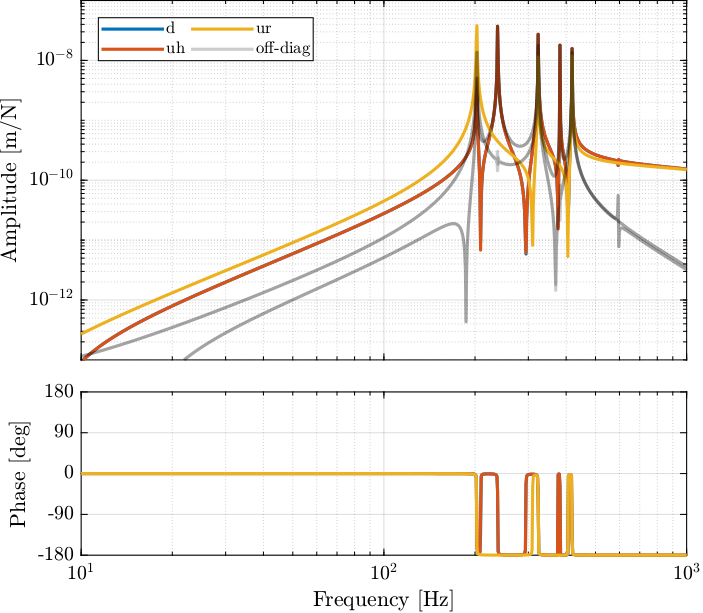
The bode plot of $\bm{G}_{\text{fj}}(s)$ is shown in Figure fig:bode_plot_plant_fj.
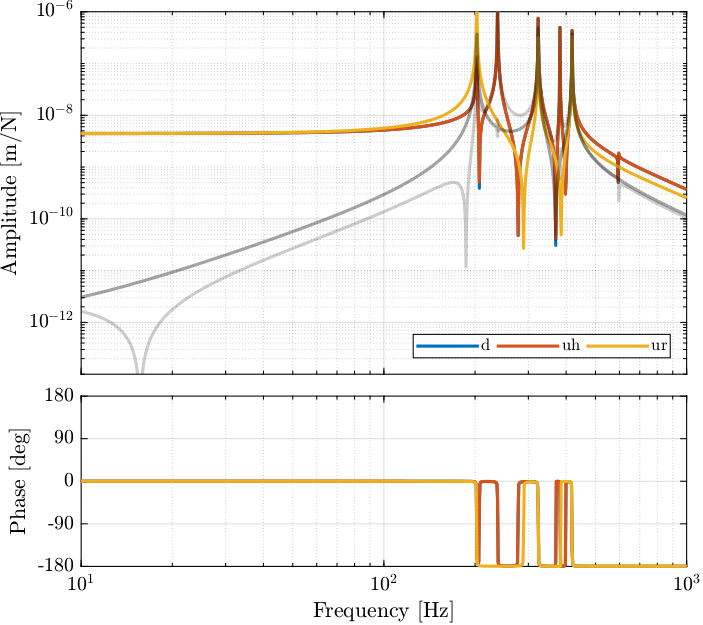
Computing the system in the frame of the fastjack gives good decoupling at low frequency (until the first resonance of the system).
Plant in the frame of the crystal
\begin{tikzpicture}
% Blocs
\node[block] (G) {$\bm{G}(s)$};
\node[block, left=1.5 of G] (Ja) {$\bm{J}_{a}^{-T}$};
\node[block, right=1.5 of G] (Js) {$\bm{J}_{s}^{-1}$};
% Connections and labels
\draw[->] ($(Ja.west)+(-1.5,0)$) node[above right]{$\begin{bmatrix} \mathcal{F}_{z} \\ \mathcal{M}_{y} \\ \mathcal{M}_{x} \end{bmatrix}$} -- (Ja.west);
\draw[->] (Ja.east) -- node[midway, above]{$\begin{bmatrix} u_{u_r} \\ u_{u_h} \\ u_d \end{bmatrix}$} (G.west);
\draw[->] (G.east) -- node[midway, above]{$\begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix}$} (Js.west);
\draw[->] (Js.east) -- ++(1.5, 0) node[above left]{$\begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix}$};
\begin{scope}[on background layer]
\node[fit={(Ja.south west) ($(Js.east)+(0, 1.4)$)}, fill=black!20!white, draw, inner sep=6pt] (system) {};
\node[above] at (system.north) {$\bm{G}_{\text{cr}}(s)$};
\end{scope}
\end{tikzpicture}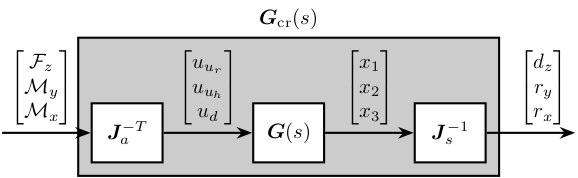
G_mr = inv(J_s_111)*G*inv(J_a_111');dcgain(G_mr)| 1.9978e-09 | 3.9657e-09 | 7.7944e-09 |
| 3.9656e-09 | 8.4979e-08 | -1.5135e-17 |
| 7.7944e-09 | -3.9252e-17 | 1.834e-07 |
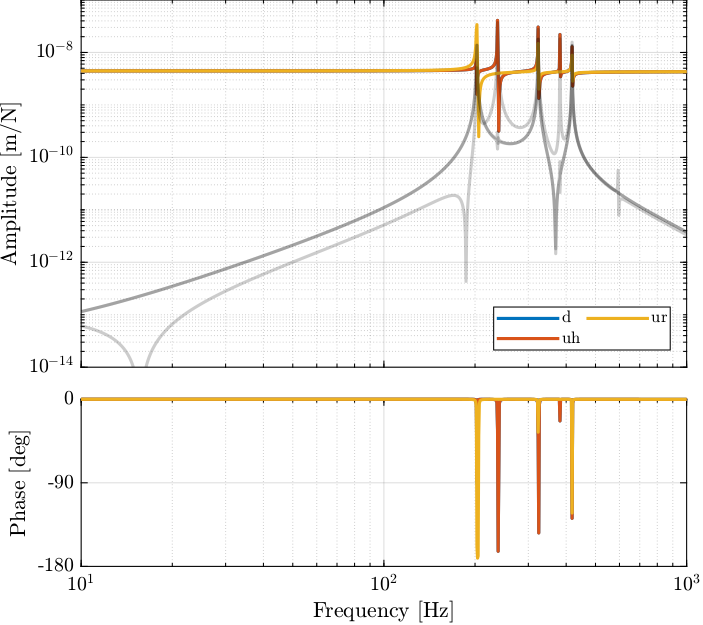
This results in a coupled system. The main reason is that, as we map forces to the center of the 111 crystal and not at the center of mass/stiffness of the moving part, vertical forces will induce rotation and torques will induce vertical motion.
Active Damping Plant (Strain gauges)
<<sec:active_damping_strain_gauges>>
Introduction ignore
In this section, we wish to see whether if strain gauges fixed to the piezoelectric actuator can be used for active damping.
Identification
%% Input/Output definition
clear io; io_i = 1;
%% Inputs
% Control Input {3x1} [N]
io(io_i) = linio([mdl, '/control_system'], 1, 'openinput'); io_i = io_i + 1;
%% Outputs
% Strain Gauges {3x1} [m]
io(io_i) = linio([mdl, '/DCM'], 2, 'openoutput'); io_i = io_i + 1;%% Extraction of the dynamics
G_sg = linearize(mdl, io);dcgain(G_sg)| 4.4443e-09 | 1.0339e-13 | 3.774e-14 |
| 1.0339e-13 | 4.4443e-09 | 3.774e-14 |
| 3.7792e-14 | 3.7792e-14 | 4.4444e-09 |
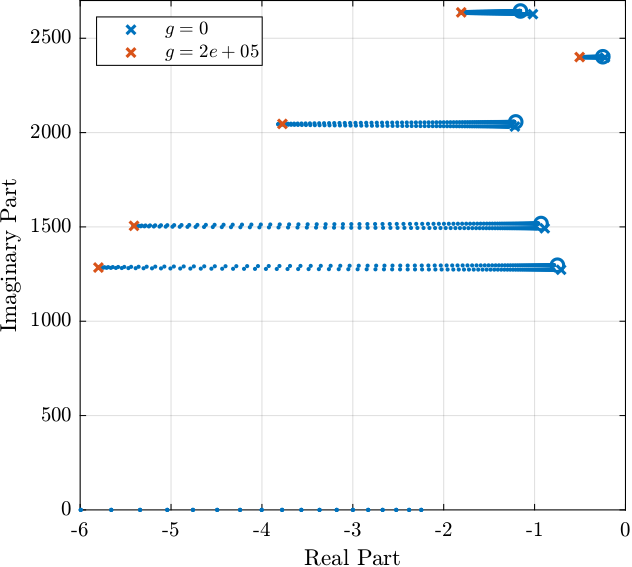
As the distance between the poles and zeros in Figure fig:iff_plant_bode_plot is very small, little damping can be actively added using the strain gauges. This will be confirmed using a Root Locus plot.
Relative Active Damping
Krad_g1 = eye(3)*s/(s^2/(2*pi*500)^2 + 2*s/(2*pi*500) + 1);As can be seen in Figure fig:relative_damping_root_locus, very little damping can be added using relative damping strategy using strain gauges.
Krad = -g*Krad_g1;Damped Plant
The controller is implemented on Simscape, and the damped plant is identified.
%% Input/Output definition
clear io; io_i = 1;
%% Inputs
% Control Input {3x1} [N]
io(io_i) = linio([mdl, '/control_system'], 1, 'input'); io_i = io_i + 1;
%% Outputs
% Force Sensor {3x1} [m]
io(io_i) = linio([mdl, '/DCM'], 1, 'openoutput'); io_i = io_i + 1;%% DCM Kinematics
load('mat/dcm_kinematics.mat');%% Identification of the Open Loop plant
controller.type = 0; % Open Loop
G_ol = J_a_111*inv(J_s_111)*linearize(mdl, io);
G_ol.InputName = {'u_ur', 'u_uh', 'u_d'};
G_ol.OutputName = {'d_ur', 'd_uh', 'd_d'};%% Identification of the damped plant with Relative Active Damping
controller.type = 2; % RAD
G_dp = J_a_111*inv(J_s_111)*linearize(mdl, io);
G_dp.InputName = {'u_ur', 'u_uh', 'u_d'};
G_dp.OutputName = {'d_ur', 'd_uh', 'd_d'};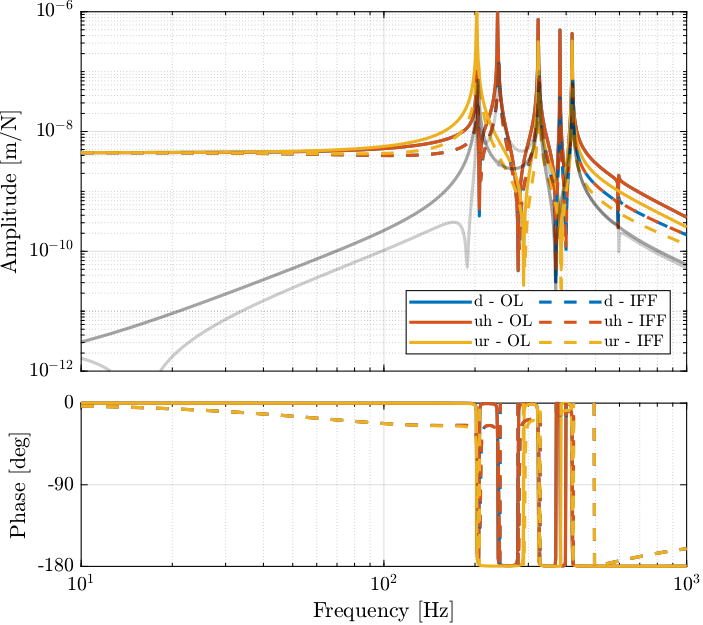
Active Damping Plant (Force Sensors)
<<sec:active_damping_iff>>
Introduction ignore
Force sensors are added above the piezoelectric actuators. They can consists of a simple piezoelectric ceramic stack. See for instance cite:fleming10_integ_strain_force_feedb_high.
Identification
%% Input/Output definition
clear io; io_i = 1;
%% Inputs
% Control Input {3x1} [N]
io(io_i) = linio([mdl, '/control_system'], 1, 'openinput'); io_i = io_i + 1;
%% Outputs
% Force Sensor {3x1} [m]
io(io_i) = linio([mdl, '/DCM'], 3, 'openoutput'); io_i = io_i + 1;%% Extraction of the dynamics
G_fs = linearize(mdl, io);dcgain(G_fs)| -1.4113e-13 | 1.0339e-13 | 3.774e-14 |
| 1.0339e-13 | -1.4113e-13 | 3.774e-14 |
| 3.7792e-14 | 3.7792e-14 | -7.5585e-14 |
Controller - Root Locus
Kiff_g1 = eye(3)*1/(1 + s/2/pi/20);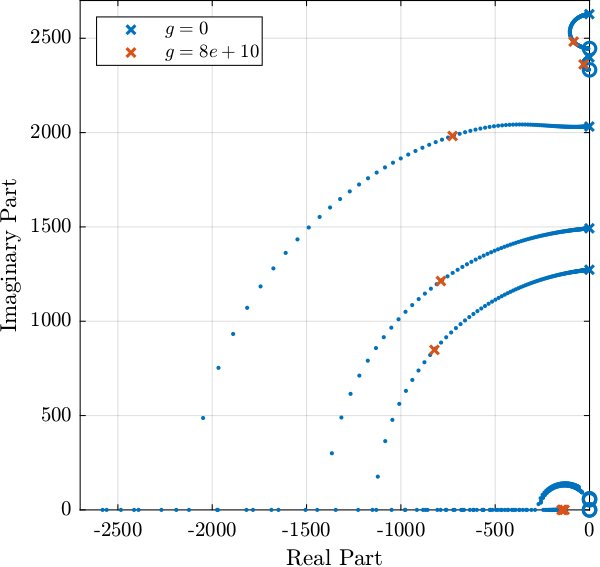
%% Integral Force Feedback Controller
Kiff = g*Kiff_g1;Damped Plant
%% Input/Output definition
clear io; io_i = 1;
%% Inputs
% Control Input {3x1} [N]
io(io_i) = linio([mdl, '/control_system'], 1, 'input'); io_i = io_i + 1;
%% Outputs
% Force Sensor {3x1} [m]
io(io_i) = linio([mdl, '/DCM'], 1, 'openoutput'); io_i = io_i + 1;%% DCM Kinematics
load('mat/dcm_kinematics.mat');%% Identification of the Open Loop plant
controller.type = 0; % Open Loop
G_ol = J_a_111*inv(J_s_111)*linearize(mdl, io);
G_ol.InputName = {'u_ur', 'u_uh', 'u_d'};
G_ol.OutputName = {'d_ur', 'd_uh', 'd_d'};%% Identification of the damped plant with IFF
controller.type = 1; % IFF
G_dp = J_a_111*inv(J_s_111)*linearize(mdl, io);
G_dp.InputName = {'u_ur', 'u_uh', 'u_d'};
G_dp.OutputName = {'d_ur', 'd_uh', 'd_d'};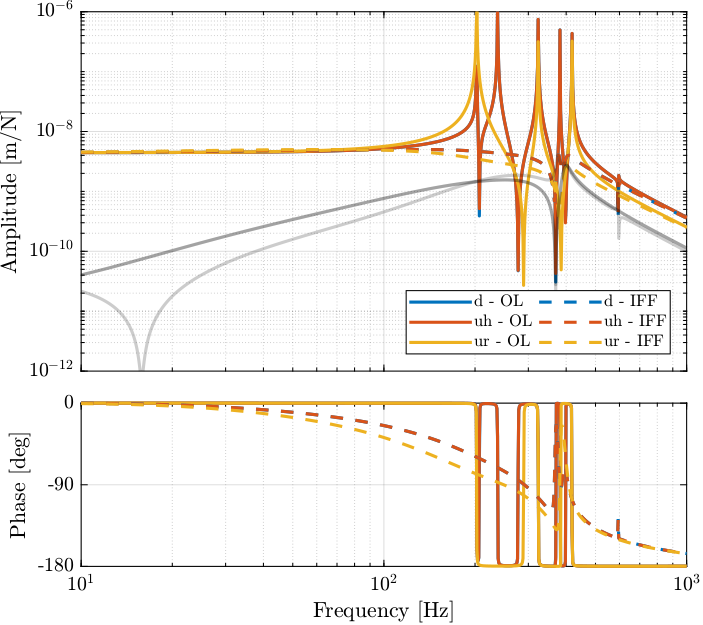
The Integral Force Feedback control strategy is very effective in damping the suspension modes of the DCM.
Save
save('mat/Kiff.mat', 'Kiff');HAC-LAC (IFF) architecture
<<sec:hac_iff>>