Finite Element Model with Simscape
Table of Contents
- 1. Amplified Piezoelectric Actuator - 3D elements
- 1.1. Import Mass Matrix, Stiffness Matrix, and Interface Nodes Coordinates
- 1.2. Output parameters
- 1.3. Piezoelectric parameters
- 1.4. Identification of the Dynamics
- 1.5. Comparison with Ansys
- 1.6. Force Sensor
- 1.7. Distributed Actuator
- 1.8. Distributed Actuator and Force Sensor
- 1.9. Dynamics from input voltage to displacement
- 1.10. Dynamics from input voltage to output voltage
- 2. APA300ML
- 3. Flexible Joint
- 4. Integral Force Feedback with Amplified Piezo
1 Amplified Piezoelectric Actuator - 3D elements
The idea here is to:
- export a FEM of an amplified piezoelectric actuator from Ansys to Matlab
- import it into a Simscape model
- compare the obtained dynamics
- add 10kg mass on top of the actuator and identify the dynamics
- compare with results from Ansys where 10kg are directly added to the FEM
1.1 Import Mass Matrix, Stiffness Matrix, and Interface Nodes Coordinates
We first extract the stiffness and mass matrices.
K = extractMatrix('piezo_amplified_3d_K.txt');
M = extractMatrix('piezo_amplified_3d_M.txt');
Then, we extract the coordinates of the interface nodes.
[int_xyz, int_i, n_xyz, n_i, nodes] = extractNodes('piezo_amplified_3d.txt');
save('./mat/piezo_amplified_3d.mat', 'int_xyz', 'int_i', 'n_xyz', 'n_i', 'nodes', 'M', 'K');
1.2 Output parameters
load('./mat/piezo_amplified_3d.mat', 'int_xyz', 'int_i', 'n_xyz', 'n_i', 'nodes', 'M', 'K');
| Total number of Nodes | 168959 |
| Number of interface Nodes | 13 |
| Number of Modes | 30 |
| Size of M and K matrices | 108 |
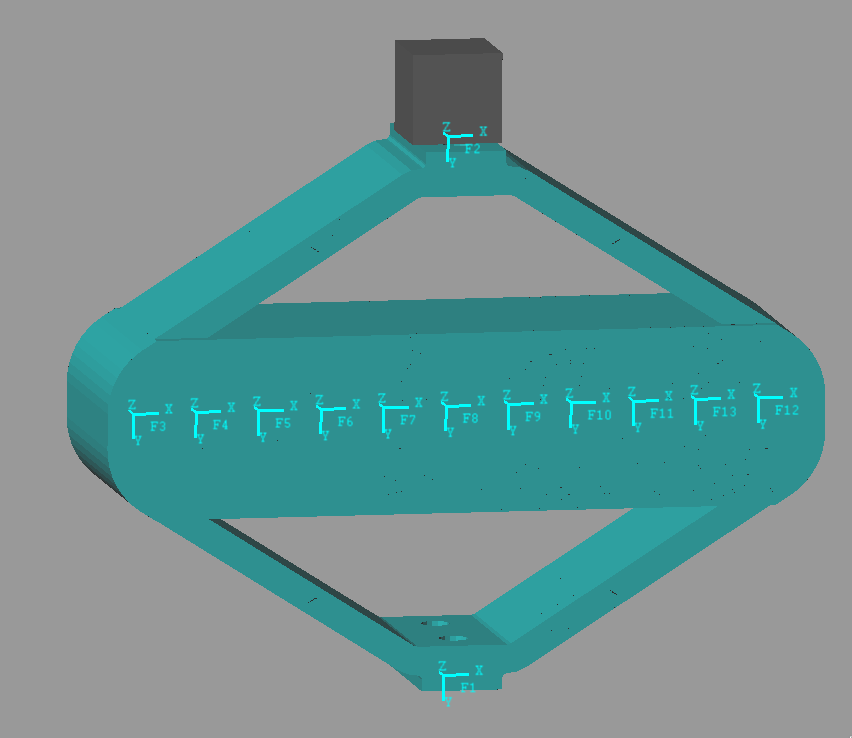
Figure 1: Interface Nodes for the Amplified Piezo Actuator
| Node i | Node Number | x [m] | y [m] | z [m] |
|---|---|---|---|---|
| 1.0 | 168947.0 | 0.0 | 0.03 | 0.0 |
| 2.0 | 168949.0 | 0.0 | -0.03 | 0.0 |
| 3.0 | 168950.0 | -0.035 | 0.0 | 0.0 |
| 4.0 | 168951.0 | -0.028 | 0.0 | 0.0 |
| 5.0 | 168952.0 | -0.021 | 0.0 | 0.0 |
| 6.0 | 168953.0 | -0.014 | 0.0 | 0.0 |
| 7.0 | 168954.0 | -0.007 | 0.0 | 0.0 |
| 8.0 | 168955.0 | 0.0 | 0.0 | 0.0 |
| 9.0 | 168956.0 | 0.007 | 0.0 | 0.0 |
| 10.0 | 168957.0 | 0.014 | 0.0 | 0.0 |
| 11.0 | 168958.0 | 0.021 | 0.0 | 0.0 |
| 12.0 | 168959.0 | 0.035 | 0.0 | 0.0 |
| 13.0 | 168960.0 | 0.028 | 0.0 | 0.0 |
| 300000000.0 | -30000.0 | 8000.0 | -200.0 | -30.0 | -60000.0 | 20000000.0 | -4000.0 | 500.0 | 8 |
| -30000.0 | 100000000.0 | 400.0 | 30.0 | 200.0 | -1 | 4000.0 | -8000000.0 | 800.0 | 7 |
| 8000.0 | 400.0 | 50000000.0 | -800000.0 | -300.0 | -40.0 | 300.0 | 100.0 | 5000000.0 | 40000.0 |
| -200.0 | 30.0 | -800000.0 | 20000.0 | 5 | 1 | -10.0 | -2 | -40000.0 | -300.0 |
| -30.0 | 200.0 | -300.0 | 5 | 40000.0 | 0.3 | -4 | -10.0 | 40.0 | 0.4 |
| -60000.0 | -1 | -40.0 | 1 | 0.3 | 3000.0 | 7000.0 | 0.8 | -1 | 0.0003 |
| 20000000.0 | 4000.0 | 300.0 | -10.0 | -4 | 7000.0 | 300000000.0 | 20000.0 | 3000.0 | 80.0 |
| -4000.0 | -8000000.0 | 100.0 | -2 | -10.0 | 0.8 | 20000.0 | 100000000.0 | -4000.0 | -100.0 |
| 500.0 | 800.0 | 5000000.0 | -40000.0 | 40.0 | -1 | 3000.0 | -4000.0 | 50000000.0 | 800000.0 |
| 8 | 7 | 40000.0 | -300.0 | 0.4 | 0.0003 | 80.0 | -100.0 | 800000.0 | 20000.0 |
| 0.03 | 2e-06 | -2e-07 | 1e-08 | 2e-08 | 0.0002 | -0.001 | 2e-07 | -8e-08 | -9e-10 |
| 2e-06 | 0.02 | -5e-07 | 7e-09 | 3e-08 | 2e-08 | -3e-07 | 0.0003 | -1e-08 | 1e-10 |
| -2e-07 | -5e-07 | 0.02 | -9e-05 | 4e-09 | -1e-08 | 2e-07 | -2e-08 | -0.0006 | -5e-06 |
| 1e-08 | 7e-09 | -9e-05 | 1e-06 | 6e-11 | 4e-10 | -1e-09 | 3e-11 | 5e-06 | 3e-08 |
| 2e-08 | 3e-08 | 4e-09 | 6e-11 | 1e-06 | 2e-10 | -2e-09 | 2e-10 | -7e-09 | -4e-11 |
| 0.0002 | 2e-08 | -1e-08 | 4e-10 | 2e-10 | 2e-06 | -2e-06 | -1e-09 | -7e-10 | -9e-12 |
| -0.001 | -3e-07 | 2e-07 | -1e-09 | -2e-09 | -2e-06 | 0.03 | -2e-06 | -1e-07 | -5e-09 |
| 2e-07 | 0.0003 | -2e-08 | 3e-11 | 2e-10 | -1e-09 | -2e-06 | 0.02 | -8e-07 | -1e-08 |
| -8e-08 | -1e-08 | -0.0006 | 5e-06 | -7e-09 | -7e-10 | -1e-07 | -8e-07 | 0.02 | 9e-05 |
| -9e-10 | 1e-10 | -5e-06 | 3e-08 | -4e-11 | -9e-12 | -5e-09 | -1e-08 | 9e-05 | 1e-06 |
Using K, M and int_xyz, we can use the Reduced Order Flexible Solid simscape block.
1.3 Piezoelectric parameters
Parameters for the APA95ML:
d33 = 3e-10; % Strain constant [m/V] n = 80; % Number of layers per stack eT = 1.6e-7; % Permittivity under constant stress [F/m] sD = 2e-11; % Elastic compliance under constant electric displacement [m2/N] ka = 235e6; % Stack stiffness [N/m] C = 5e-6; % Stack capactiance [F]
na = 2; % Number of stacks used as actuator ns = 1; % Number of stacks used as force sensor
The ratio of the developed force to applied voltage is \(d_{33} n k_a\) in [N/V]. We denote this constant by \(g_a\) and: \[ F_a = g_a V_a, \quad g_a = d_{33} n k_a \]
d33*(na*n)*(ka/(na + ns)) % [N/V]
3.76
From (Fleming and Leang 2014) (page 123), the relation between relative displacement and generated voltage is: \[ V_s = \frac{d_{33}}{\epsilon^T s^D n} \Delta h \] where:
- \(V_s\): measured voltage [V]
- \(d_{33}\): strain constant [m/V]
- \(\epsilon^T\): permittivity under constant stress [F/m]
- \(s^D\): elastic compliance under constant electric displacement [m^2/N]
- \(n\): number of layers
- \(\Delta h\): relative displacement [m]
1e-6*d33/(eT*sD*ns*n) % [V/um]
1.1719
1.4 Identification of the Dynamics
The flexible element is imported using the Reduced Order Flexible Solid simscape block.
To model the actuator, an Internal Force block is added between the nodes 3 and 12.
A Relative Motion Sensor block is added between the nodes 1 and 2 to measure the displacement and the amplified piezo.
One mass is fixed at one end of the piezo-electric stack actuator, the other end is fixed to the world frame.
We first set the mass to be zero.
m = 0.01;
The dynamics is identified from the applied force to the measured relative displacement.
%% Name of the Simulink File mdl = 'piezo_amplified_3d'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/y'], 1, 'openoutput'); io_i = io_i + 1; Gh = -linearize(mdl, io);
Then, we add 10Kg of mass:
m = 5;
And the dynamics is identified.
The two identified dynamics are compared in Figure 2.
%% Name of the Simulink File mdl = 'piezo_amplified_3d'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/y'], 1, 'openoutput'); io_i = io_i + 1; Ghm = -linearize(mdl, io);
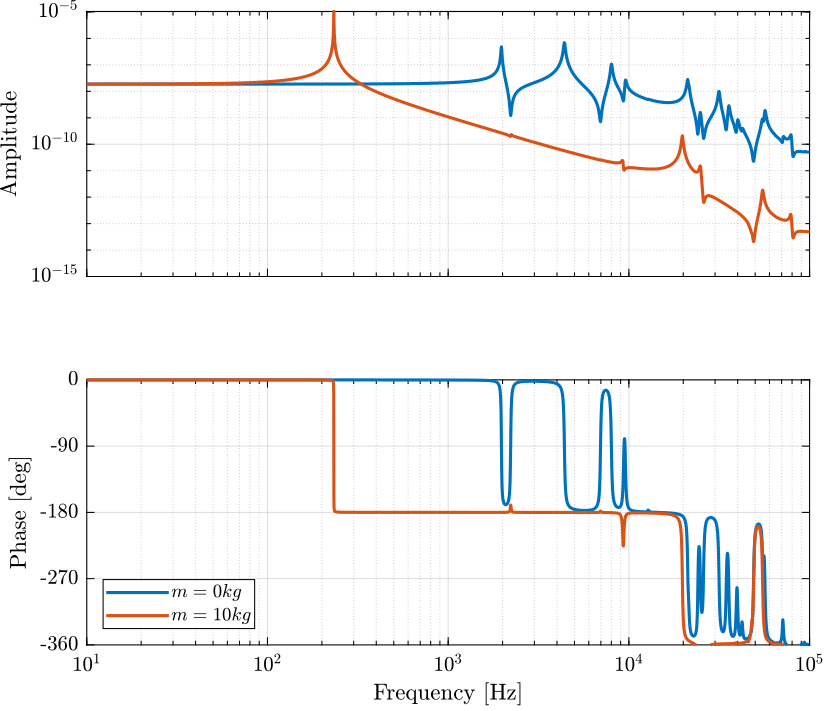
Figure 2: Dynamics from \(F\) to \(d\) without a payload and with a 10kg payload
1.5 Comparison with Ansys
Let’s import the results from an Harmonic response analysis in Ansys.
Gresp0 = readtable('FEA_HarmResponse_00kg.txt');
Gresp10 = readtable('FEA_HarmResponse_10kg.txt');
The obtained dynamics from the Simscape model and from the Ansys analysis are compare in Figure 3.
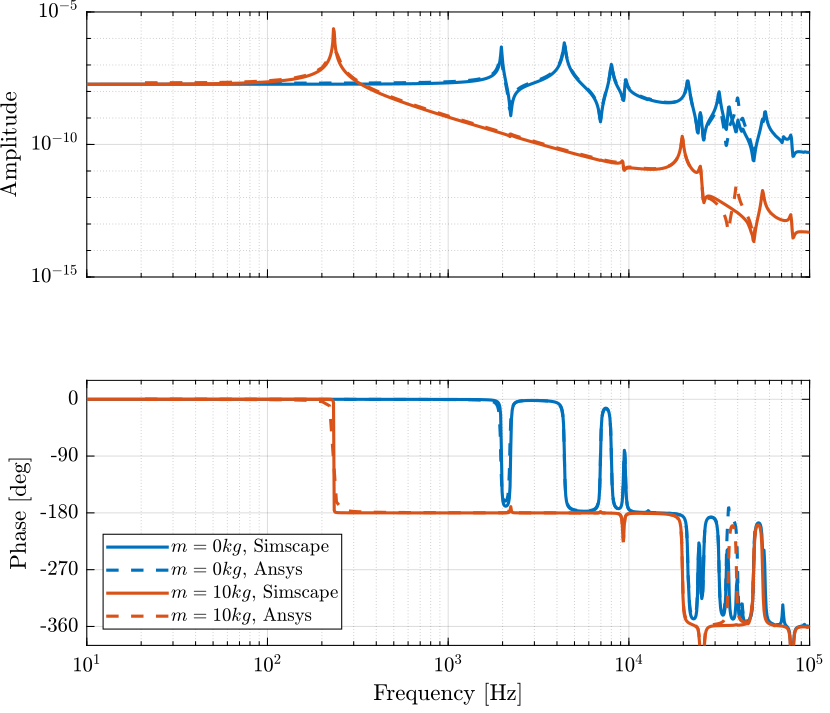
Figure 3: Comparison of the obtained dynamics using Simscape with the harmonic response analysis using Ansys
1.6 Force Sensor
The dynamics is identified from internal forces applied between nodes 3 and 11 to the relative displacement of nodes 11 and 13.
The obtained dynamics is shown in Figure 4.
m = 0;
%% Name of the Simulink File mdl = 'piezo_amplified_3d'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Fa'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/Fs'], 1, 'openoutput'); io_i = io_i + 1; Gf = linearize(mdl, io);
m = 10;
%% Name of the Simulink File mdl = 'piezo_amplified_3d'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Fa'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/Fs'], 1, 'openoutput'); io_i = io_i + 1; Gfm = linearize(mdl, io);
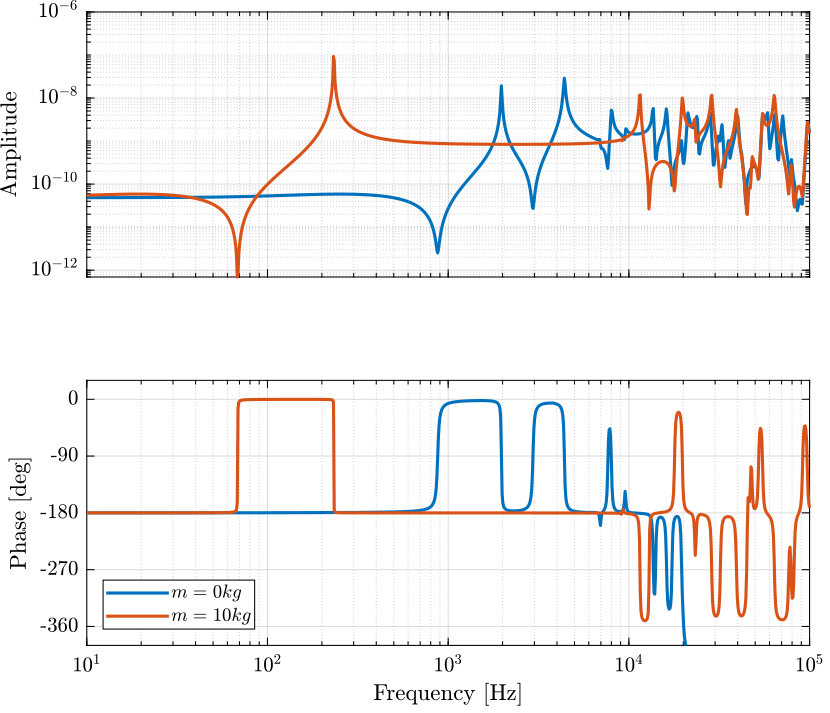
Figure 4: Dynamics from \(F\) to \(F_m\) for \(m=0\) and \(m = 10kg\)
1.7 Distributed Actuator
m = 0;
The dynamics is identified from the applied force to the measured relative displacement.
%% Name of the Simulink File mdl = 'piezo_amplified_3d_distri'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/y'], 1, 'openoutput'); io_i = io_i + 1; Gd = linearize(mdl, io);
Then, we add 10Kg of mass:
m = 10;
And the dynamics is identified.
%% Name of the Simulink File mdl = 'piezo_amplified_3d_distri'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/y'], 1, 'openoutput'); io_i = io_i + 1; Gdm = linearize(mdl, io);
1.8 Distributed Actuator and Force Sensor
m = 0;
%% Name of the Simulink File mdl = 'piezo_amplified_3d_distri_act_sens'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/Fm'], 1, 'openoutput'); io_i = io_i + 1; Gfd = linearize(mdl, io);
m = 10;
%% Name of the Simulink File mdl = 'piezo_amplified_3d_distri_act_sens'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/Fm'], 1, 'openoutput'); io_i = io_i + 1; Gfdm = linearize(mdl, io);
1.9 Dynamics from input voltage to displacement
m = 5;
And the dynamics is identified.
The two identified dynamics are compared in Figure 2.
%% Name of the Simulink File mdl = 'piezo_amplified_3d'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/V'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/y'], 1, 'openoutput'); io_i = io_i + 1; G = -linearize(mdl, io);
save('../test-bench-apa/mat/fem_model_5kg.mat', 'G')
1.10 Dynamics from input voltage to output voltage
m = 5;
%% Name of the Simulink File mdl = 'piezo_amplified_3d'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Va'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/Vs'], 1, 'openoutput'); io_i = io_i + 1; G = -linearize(mdl, io);
2 APA300ML
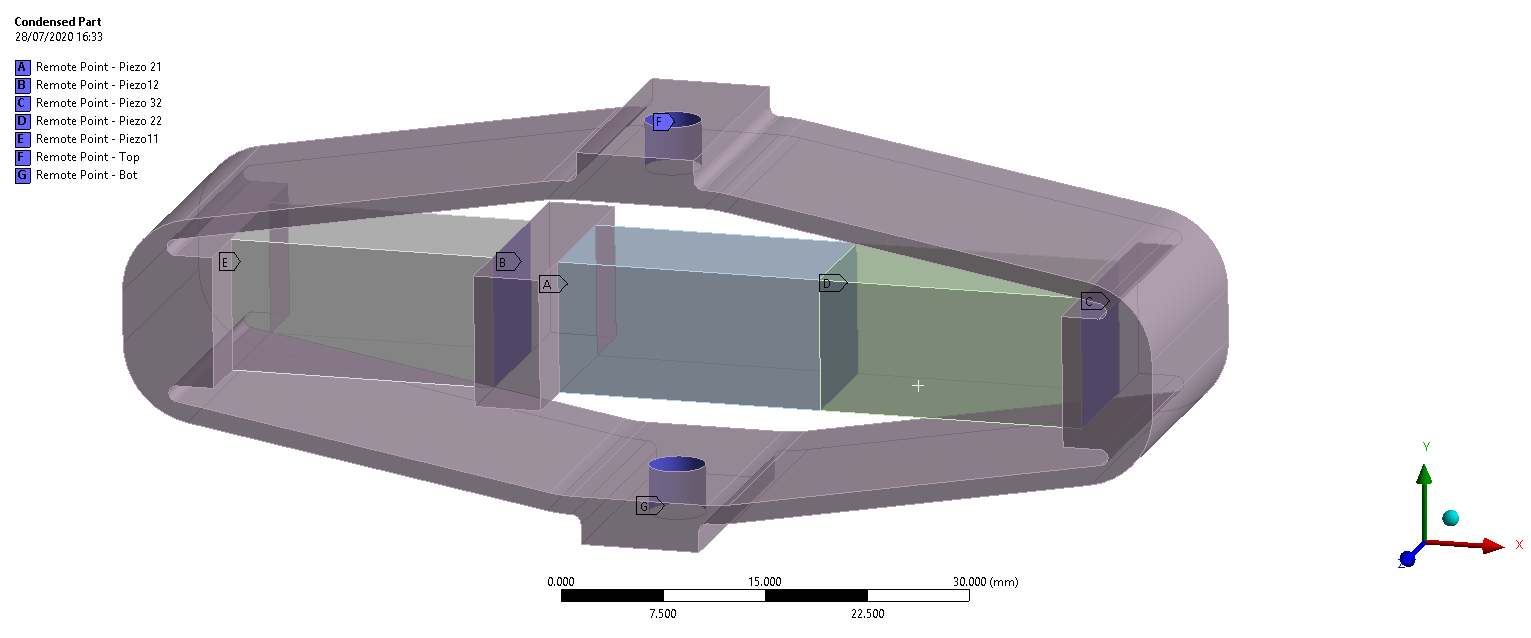
Figure 5: Ansys FEM of the APA300ML
2.1 Import Mass Matrix, Stiffness Matrix, and Interface Nodes Coordinates
We first extract the stiffness and mass matrices.
K = extractMatrix('mat_K-48modes-7MDoF.matrix');
M = extractMatrix('mat_M-48modes-7MDoF.matrix');
K = extractMatrix('mat_K-80modes-7MDoF.matrix');
M = extractMatrix('mat_M-80modes-7MDoF.matrix');
Then, we extract the coordinates of the interface nodes.
[int_xyz, int_i, n_xyz, n_i, nodes] = extractNodes('Nodes_MDoF_NLIST_MLIST.txt');
save('./mat/APA300ML.mat', 'int_xyz', 'int_i', 'n_xyz', 'n_i', 'nodes', 'M', 'K');
2.2 Output parameters
load('./mat/APA300ML.mat', 'int_xyz', 'int_i', 'n_xyz', 'n_i', 'nodes', 'M', 'K');
| Total number of Nodes | 7 |
| Number of interface Nodes | 7 |
| Number of Modes | 6 |
| Size of M and K matrices | 48 |
| Node i | Node Number | x [m] | y [m] | z [m] |
|---|---|---|---|---|
| 1.0 | 53917.0 | 0.0 | -0.015 | 0.0 |
| 2.0 | 53918.0 | 0.0 | 0.015 | 0.0 |
| 3.0 | 53919.0 | -0.0325 | 0.0 | 0.0 |
| 4.0 | 53920.0 | -0.0125 | 0.0 | 0.0 |
| 5.0 | 53921.0 | -0.0075 | 0.0 | 0.0 |
| 6.0 | 53922.0 | 0.0125 | 0.0 | 0.0 |
| 7.0 | 53923.0 | 0.0325 | 0.0 | 0.0 |
| 200000000.0 | 30000.0 | 50000.0 | 200.0 | -100.0 | -300000.0 | 10000000.0 | -6000.0 | 20000.0 | -60.0 |
| 30000.0 | 7000000.0 | 10000.0 | 30.0 | -30.0 | -70.0 | 7000.0 | -500000.0 | 3000.0 | -10.0 |
| 50000.0 | 10000.0 | 30000000.0 | 200000.0 | -200.0 | -100.0 | 20000.0 | -2000.0 | 2000000.0 | -9000.0 |
| 200.0 | 30.0 | 200000.0 | 1000.0 | -0.8 | -0.4 | 50.0 | -6 | 9000.0 | -30.0 |
| -100.0 | -30.0 | -200.0 | -0.8 | 10000.0 | 0.2 | -40.0 | 10.0 | 20.0 | -0.05 |
| -300000.0 | -70.0 | -100.0 | -0.4 | 0.2 | 900.0 | -30000.0 | 10.0 | -40.0 | 0.1 |
| 10000000.0 | 7000.0 | 20000.0 | 50.0 | -40.0 | -30000.0 | 200000000.0 | -50000.0 | 30000.0 | -50.0 |
| -6000.0 | -500000.0 | -2000.0 | -6 | 10.0 | 10.0 | -50000.0 | 7000000.0 | -4000.0 | 8 |
| 20000.0 | 3000.0 | 2000000.0 | 9000.0 | 20.0 | -40.0 | 30000.0 | -4000.0 | 30000000.0 | -200000.0 |
| -60.0 | -10.0 | -9000.0 | -30.0 | -0.05 | 0.1 | -50.0 | 8 | -200000.0 | 1000.0 |
| 0.01 | 7e-06 | -5e-06 | -6e-08 | 3e-09 | -5e-05 | -0.0005 | -2e-07 | -3e-06 | 1e-08 |
| 7e-06 | 0.009 | 4e-07 | 6e-09 | -4e-09 | -3e-08 | -2e-07 | 6e-05 | 5e-07 | -1e-09 |
| -5e-06 | 4e-07 | 0.01 | 2e-05 | 2e-08 | 3e-08 | -2e-06 | -1e-07 | -0.0002 | 9e-07 |
| -6e-08 | 6e-09 | 2e-05 | 3e-07 | 1e-10 | 3e-10 | -7e-09 | 2e-10 | -9e-07 | 3e-09 |
| 3e-09 | -4e-09 | 2e-08 | 1e-10 | 1e-07 | -3e-12 | 6e-09 | -2e-10 | -3e-09 | 9e-12 |
| -5e-05 | -3e-08 | 3e-08 | 3e-10 | -3e-12 | 6e-07 | 1e-06 | -3e-09 | 2e-08 | -7e-11 |
| -0.0005 | -2e-07 | -2e-06 | -7e-09 | 6e-09 | 1e-06 | 0.01 | -8e-06 | -2e-06 | 9e-09 |
| -2e-07 | 6e-05 | -1e-07 | 2e-10 | -2e-10 | -3e-09 | -8e-06 | 0.009 | 1e-07 | 2e-09 |
| -3e-06 | 5e-07 | -0.0002 | -9e-07 | -3e-09 | 2e-08 | -2e-06 | 1e-07 | 0.01 | -2e-05 |
| 1e-08 | -1e-09 | 9e-07 | 3e-09 | 9e-12 | -7e-11 | 9e-09 | 2e-09 | -2e-05 | 3e-07 |
Using K, M and int_xyz, we can use the Reduced Order Flexible Solid simscape block.
2.3 Piezoelectric parameters
Parameters for the APA95ML:
d33 = 3e-10; % Strain constant [m/V] n = 80; % Number of layers per stack eT = 1.6e-8; % Permittivity under constant stress [F/m] sD = 2e-11; % Elastic compliance under constant electric displacement [m2/N] ka = 235e6; % Stack stiffness [N/m] C = 5e-6; % Stack capactiance [F]
na = 3; % Number of stacks used as actuator ns = 0; % Number of stacks used as force sensor
The ratio of the developed force to applied voltage is \(d_{33} n k_a\) in [N/V]. We denote this constant by \(g_a\) and: \[ F_a = g_a V_a, \quad g_a = d_{33} n k_a \]
d33*(na*n)*(ka/(na + ns)) % [N/V]
1.88
From (Fleming and Leang 2014) (page 123), the relation between relative displacement and generated voltage is: \[ V_s = \frac{d_{33}}{\epsilon^T s^D n} \Delta h \] where:
- \(V_s\): measured voltage [V]
- \(d_{33}\): strain constant [m/V]
- \(\epsilon^T\): permittivity under constant stress [F/m]
- \(s^D\): elastic compliance under constant electric displacement [m^2/N]
- \(n\): number of layers
- \(\Delta h\): relative displacement [m]
1e-6*d33/(eT*sD*ns*n) % [V/um]
5.8594
2.4 Identification of the APA Characteristics
2.4.1 Stiffness
The transfer function from vertical external force to the relative vertical displacement is identified.
The inverse of its DC gain is the axial stiffness of the APA:
1e-6/dcgain(G) % [N/um]
1.8634
The specified stiffness in the datasheet is \(k = 1.8\, [N/\mu m]\).
2.4.2 Resonance Frequency
The resonance frequency is specified to be between 650Hz and 840Hz. This is also the case for the FEM model (Figure 6).
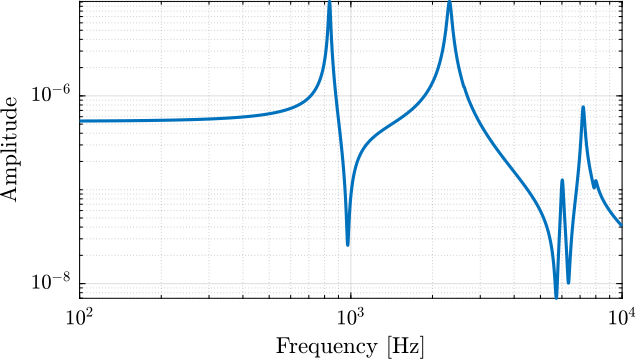
Figure 6: First resonance is around 800Hz
2.4.3 Amplification factor
The amplification factor is the ratio of the axial displacement to the stack displacement.
The ratio of the two displacement is computed from the FEM model.
-dcgain(G(1,1))./dcgain(G(2,1))
4.936
If we take the ratio of the piezo height and length (approximation of the amplification factor):
75/15
5
2.4.4 Stroke
Estimation of the actuator stroke: \[ \Delta H = A n \Delta L \] with:
- \(\Delta H\) Axial Stroke of the APA
- \(A\) Amplification factor (5 for the APA300ML)
- \(n\) Number of stack used
- \(\Delta L\) Stroke of the stack (0.1% of its length)
1e6 * 5 * 3 * 20e-3 * 0.1e-2
300
This is exactly the specified stroke in the data-sheet.
2.5 Identification of the Dynamics
The flexible element is imported using the Reduced Order Flexible Solid simscape block.
To model the actuator, an Internal Force block is added between the nodes 3 and 12.
A Relative Motion Sensor block is added between the nodes 1 and 2 to measure the displacement and the amplified piezo.
One mass is fixed at one end of the piezo-electric stack actuator, the other end is fixed to the world frame.
We first set the mass to be zero. The dynamics is identified from the applied force to the measured relative displacement. The same dynamics is identified for a payload mass of 10Kg.
m = 10;
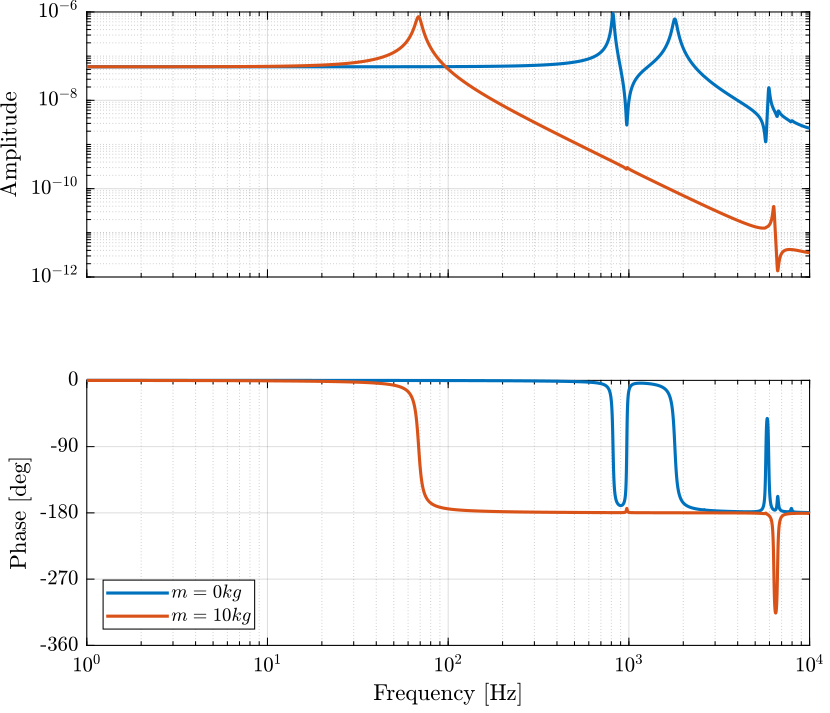
Figure 7: Transfer function from forces applied by the stack to the axial displacement of the APA
2.6 IFF
3 Flexible Joint
Figure 12: Flexor studied
3.1 Import Mass Matrix, Stiffness Matrix, and Interface Nodes Coordinates
We first extract the stiffness and mass matrices.
K = extractMatrix('mat_K_6modes_2MDoF.matrix');
M = extractMatrix('mat_M_6modes_2MDoF.matrix');
Then, we extract the coordinates of the interface nodes.
[int_xyz, int_i, n_xyz, n_i, nodes] = extractNodes('out_nodes_3D.txt');
save('./mat/flexor_ID16.mat', 'int_xyz', 'int_i', 'n_xyz', 'n_i', 'nodes', 'M', 'K');
3.2 Output parameters
load('./mat/flexor_ID16.mat', 'int_xyz', 'int_i', 'n_xyz', 'n_i', 'nodes', 'M', 'K');
| Total number of Nodes | 2 |
| Number of interface Nodes | 2 |
| Number of Modes | 6 |
| Size of M and K matrices | 18 |
| Node i | Node Number | x [m] | y [m] | z [m] |
|---|---|---|---|---|
| 1.0 | 181278.0 | 0.0 | 0.0 | 0.0 |
| 2.0 | 181279.0 | 0.0 | 0.0 | -0.0 |
| 11200000.0 | 195.0 | 2220.0 | -0.719 | -265.0 | 1.59 | -11200000.0 | -213.0 | -2220.0 | 0.147 |
| 195.0 | 11400000.0 | 1290.0 | -148.0 | -0.188 | 2.41 | -212.0 | -11400000.0 | -1290.0 | 148.0 |
| 2220.0 | 1290.0 | 119000000.0 | 1.31 | 1.49 | 1.79 | -2220.0 | -1290.0 | -119000000.0 | -1.31 |
| -0.719 | -148.0 | 1.31 | 33.0 | 0.000488 | -0.000977 | 0.141 | 148.0 | -1.31 | -33.0 |
| -265.0 | -0.188 | 1.49 | 0.000488 | 33.0 | 0.00293 | 266.0 | 0.154 | -1.49 | 0.00026 |
| 1.59 | 2.41 | 1.79 | -0.000977 | 0.00293 | 236.0 | -1.32 | -2.55 | -1.79 | 0.000379 |
| -11200000.0 | -212.0 | -2220.0 | 0.141 | 266.0 | -1.32 | 11400000.0 | 24600.0 | 1640.0 | 120.0 |
| -213.0 | -11400000.0 | -1290.0 | 148.0 | 0.154 | -2.55 | 24600.0 | 11400000.0 | 1290.0 | -72.0 |
| -2220.0 | -1290.0 | -119000000.0 | -1.31 | -1.49 | -1.79 | 1640.0 | 1290.0 | 119000000.0 | 1.32 |
| 0.147 | 148.0 | -1.31 | -33.0 | 0.00026 | 0.000379 | 120.0 | -72.0 | 1.32 | 34.7 |
| 0.02 | 1e-09 | -4e-08 | -1e-10 | 0.0002 | -3e-11 | 0.004 | 5e-08 | 7e-08 | 1e-10 |
| 1e-09 | 0.02 | -3e-07 | -0.0002 | -1e-10 | -2e-09 | 2e-08 | 0.004 | 3e-07 | 1e-05 |
| -4e-08 | -3e-07 | 0.02 | 7e-10 | -2e-09 | 1e-09 | 3e-07 | 7e-08 | 0.003 | 1e-09 |
| -1e-10 | -0.0002 | 7e-10 | 4e-06 | -1e-12 | -6e-13 | 2e-10 | -7e-06 | -8e-10 | -1e-09 |
| 0.0002 | -1e-10 | -2e-09 | -1e-12 | 3e-06 | 2e-13 | 9e-06 | 4e-11 | 2e-09 | -3e-13 |
| -3e-11 | -2e-09 | 1e-09 | -6e-13 | 2e-13 | 4e-07 | 8e-11 | 9e-10 | -1e-09 | 2e-12 |
| 0.004 | 2e-08 | 3e-07 | 2e-10 | 9e-06 | 8e-11 | 0.02 | -7e-08 | -3e-07 | -2e-10 |
| 5e-08 | 0.004 | 7e-08 | -7e-06 | 4e-11 | 9e-10 | -7e-08 | 0.01 | -4e-08 | 0.0002 |
| 7e-08 | 3e-07 | 0.003 | -8e-10 | 2e-09 | -1e-09 | -3e-07 | -4e-08 | 0.02 | -1e-09 |
| 1e-10 | 1e-05 | 1e-09 | -1e-09 | -3e-13 | 2e-12 | -2e-10 | 0.0002 | -1e-09 | 2e-06 |
Using K, M and int_xyz, we can use the Reduced Order Flexible Solid simscape block.
3.3 Flexible Joint Characteristics
| Caracteristic | Value | Estimation by Francois |
|---|---|---|
| Axial Stiffness [N/um] | 119 | 60 |
| Bending Stiffness [Nm/rad] | 33 | 15 |
| Bending Stiffness [Nm/rad] | 33 | 15 |
| Torsion Stiffness [Nm/rad] | 236 | 20 |
3.4 Identification
m = 10;
The dynamics is identified from the applied force to the measured relative displacement.
%% Name of the Simulink File mdl = 'flexor_ID16'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/T'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/D'], 1, 'openoutput'); io_i = io_i + 1; G = linearize(mdl, io);
| Caracteristic | Value | Identification |
|---|---|---|
| Axial Stiffness Dz [N/um] | 119 | 119 |
| Bending Stiffness Rx [Nm/rad] | 33 | 34 |
| Bending Stiffness Ry [Nm/rad] | 33 | 126 |
| Torsion Stiffness Rz [Nm/rad] | 236 | 238 |
4 Integral Force Feedback with Amplified Piezo
In this section, we try to replicate the results obtained in (Souleille et al. 2018).
4.1 Import Mass Matrix, Stiffness Matrix, and Interface Nodes Coordinates
We first extract the stiffness and mass matrices.
K = extractMatrix('piezo_amplified_IFF_K.txt');
M = extractMatrix('piezo_amplified_IFF_M.txt');
Then, we extract the coordinates of the interface nodes.
[int_xyz, int_i, n_xyz, n_i, nodes] = extractNodes('piezo_amplified_IFF.txt');
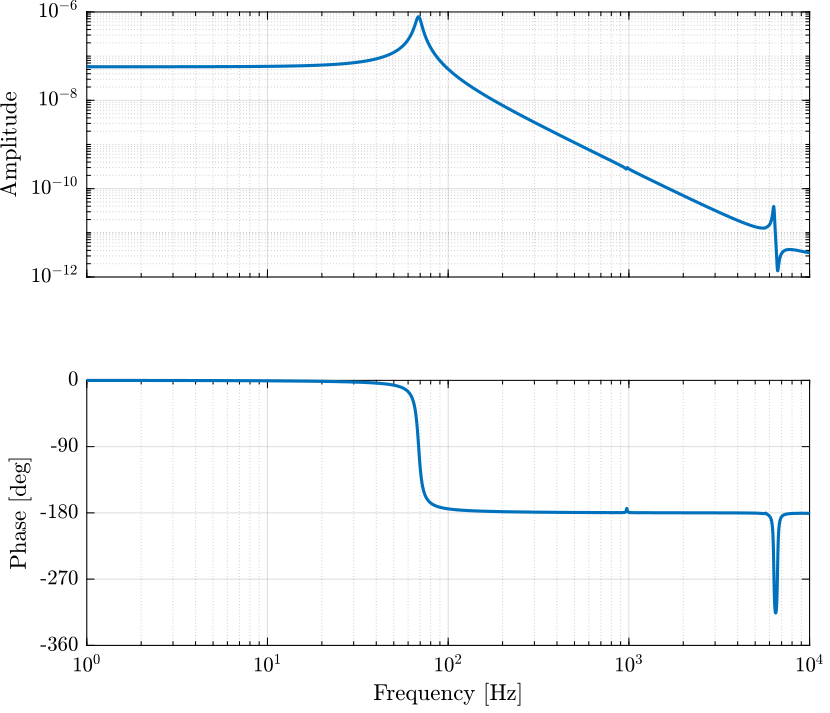
4.2 IFF Plant
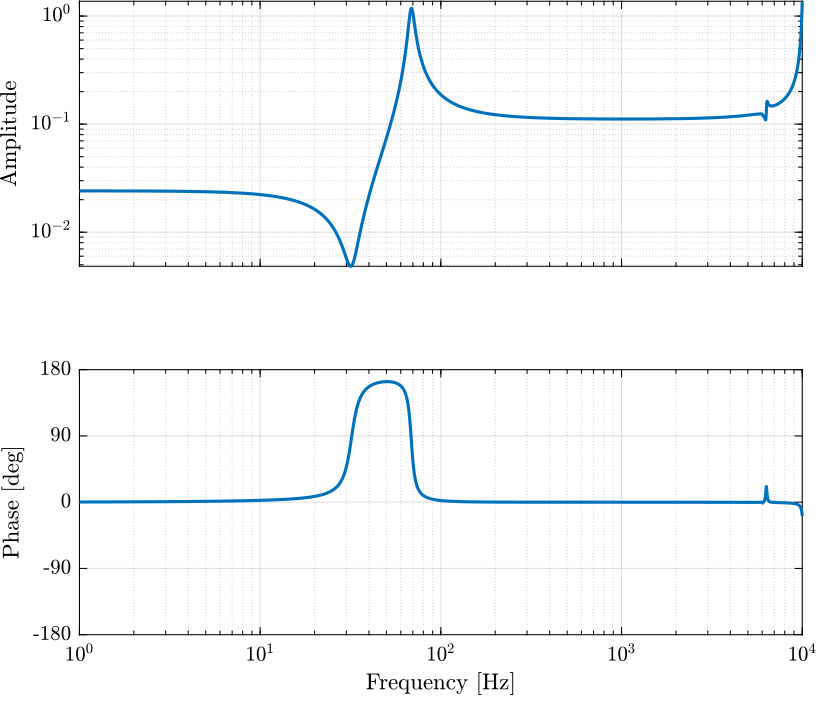
The transfer function from the force actuator to the force sensor is identified and shown in Figure 13.
Kiff = tf(0);
m = 0;
%% Name of the Simulink File mdl = 'piezo_amplified_IFF'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Kiff'], 1, 'openinput'); io_i = io_i + 1; io(io_i) = linio([mdl, '/G'], 1, 'openoutput'); io_i = io_i + 1; Gf = linearize(mdl, io);
m = 10;
Gfm = linearize(mdl, io);
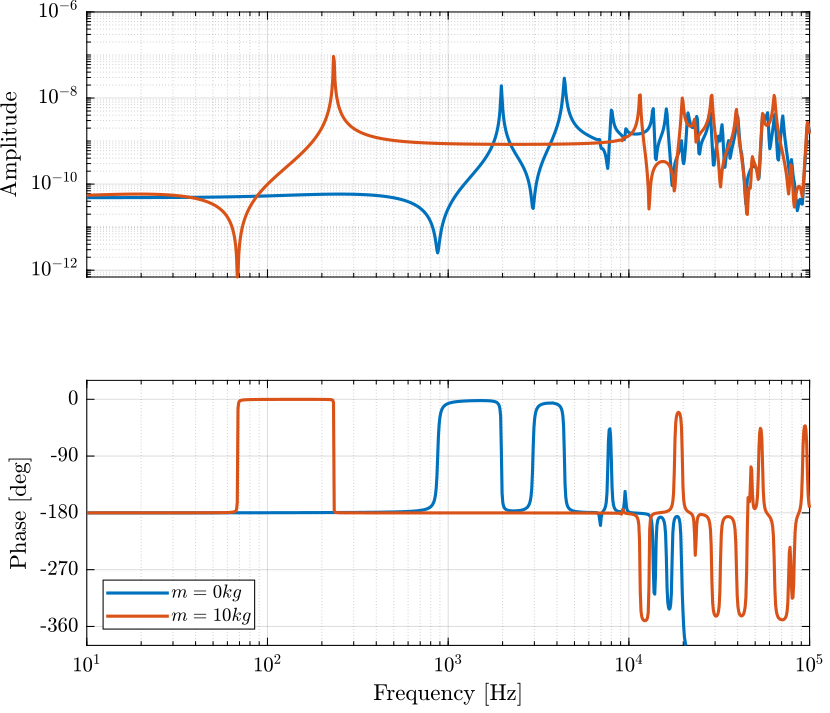
Figure 13: IFF Plant
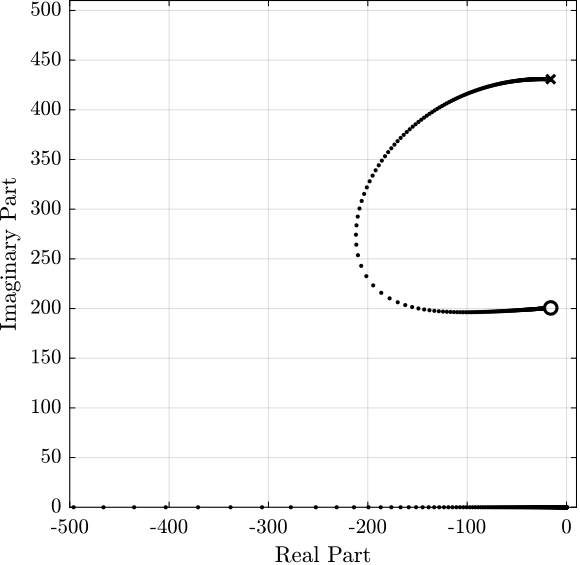
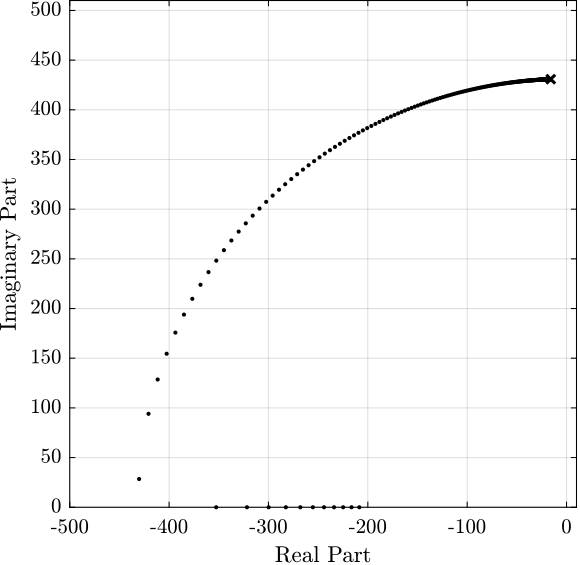
4.3 IFF controller
The controller is defined and the loop gain is shown in Figure 14.
Kiff = -1e12/s;
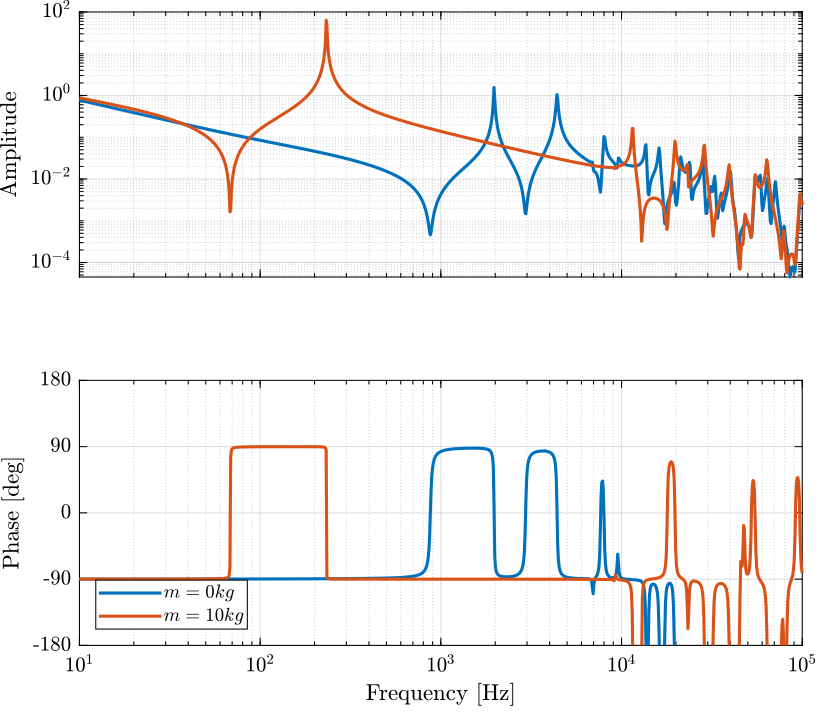
Figure 14: IFF Loop Gain
4.4 Closed Loop System
m = 10;
Kiff = -1e12/s;
%% Name of the Simulink File
mdl = 'piezo_amplified_IFF';
%% Input/Output definition
clear io; io_i = 1;
io(io_i) = linio([mdl, '/Dw'], 1, 'openinput'); io_i = io_i + 1;
io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1;
io(io_i) = linio([mdl, '/Fd'], 1, 'openinput'); io_i = io_i + 1;
io(io_i) = linio([mdl, '/d'], 1, 'openoutput'); io_i = io_i + 1;
io(io_i) = linio([mdl, '/G'], 1, 'output'); io_i = io_i + 1;
Giff = linearize(mdl, io);
Giff.InputName = {'w', 'f', 'F'};
Giff.OutputName = {'x1', 'Fs'};
Kiff = tf(0);
G = linearize(mdl, io);
G.InputName = {'w', 'f', 'F'};
G.OutputName = {'x1', 'Fs'};
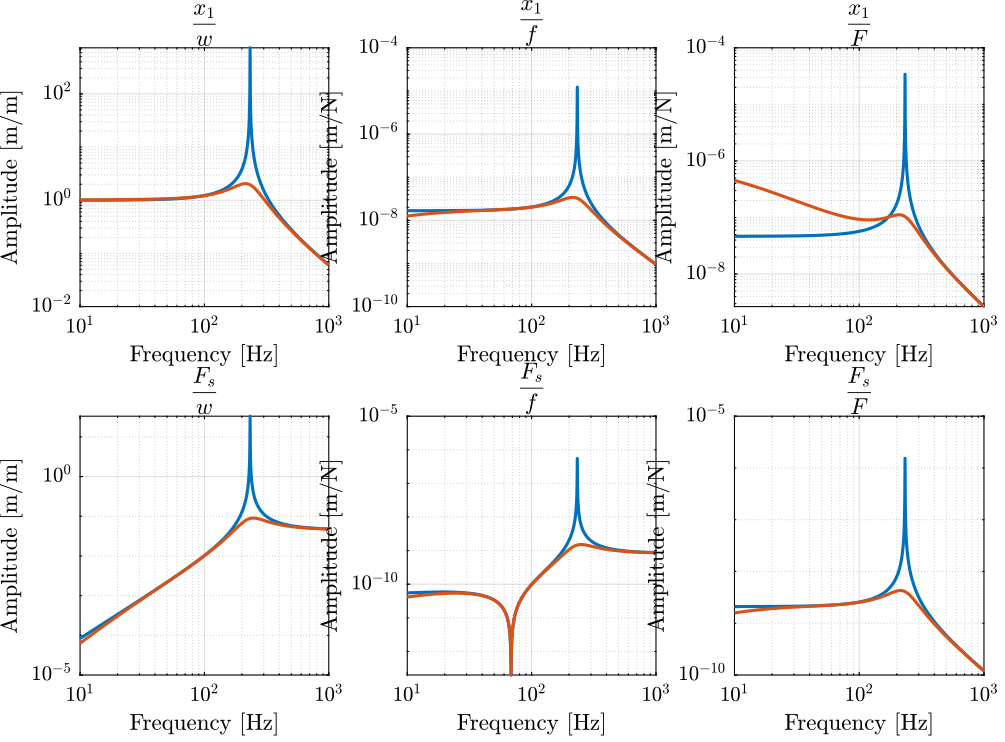
Figure 15: OL and CL transfer functions
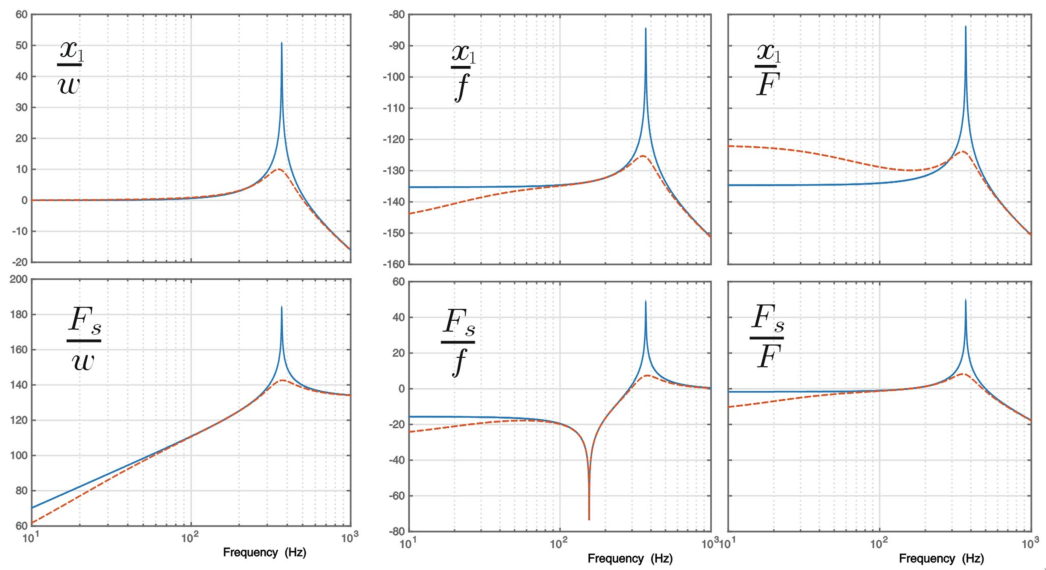
Figure 16: Results obtained in souleille18_concep_activ_mount_space_applic