Sample Stabilization for Tomography Experiments in Presence of Large Plant Uncertainty - Tikz Figures
Table of Contents
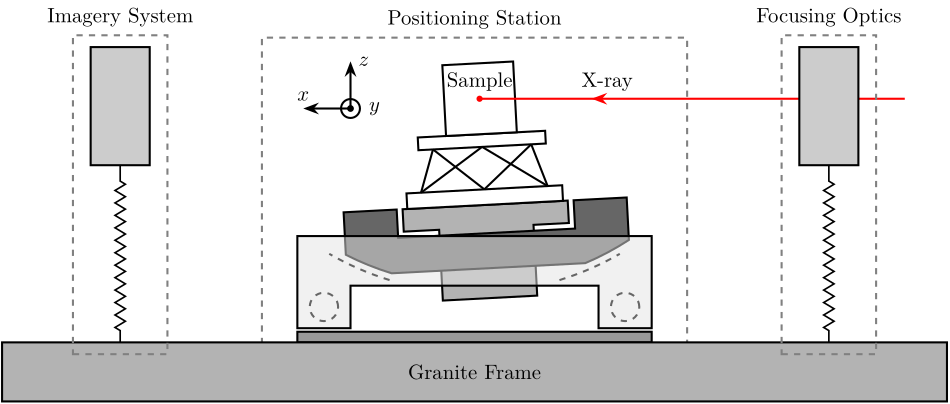
- 1. Fig 1: Schematic representation of the ID31 end station
- 2. Fig 2: CAD View of the ID31 end station
- 3. Fig 3: Picture of the ID31 end station
- 4. Fig 4: Schematic representation of the NASS added below the sample and the control architecture used
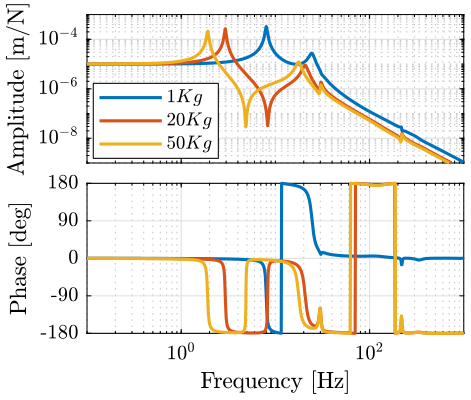
- 5. Fig 5: Transfer function from a force applied by the NASS to the displacement of the sample
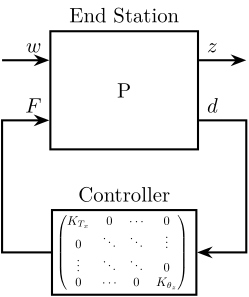
- 6. Fig 6: General control configuration applied to the end station
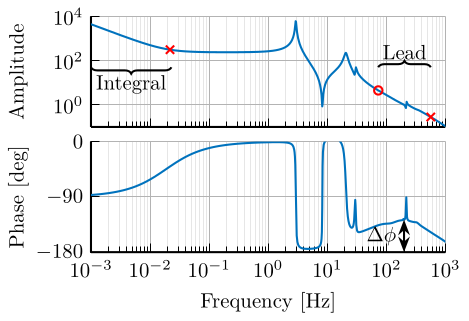
- 7. Fig 7: Bode plot of the loop gain for the control in the x direction
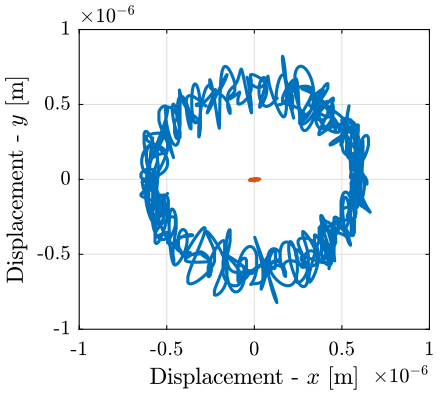
- 8. Fig 8: Positioning error of the sample in the x and y direction during the simulation of a tomography experiment
- 9. Fig 1: Schematic of the Tomography Experiment (Poster)
Configuration file is accessible here.
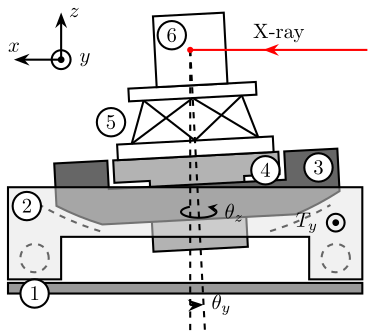
1 Fig 1: Schematic representation of the ID31 end station
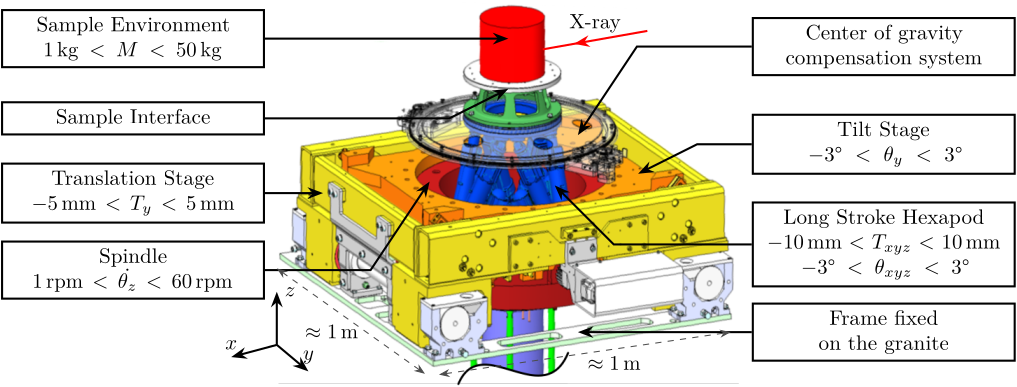
2 Fig 2: CAD View of the ID31 end station
\graphicspath{{~/Cloud/thesis/latex/img/}} \begin{tikzpicture} \tikzstyle{legend}=[draw, text width=4.2cm, align=center] \node[inner sep=0pt, anchor=south west] (assemblage) at (0,0) {\includegraphics[width=0.42\textwidth]{/home/thomas/Cloud/thesis/papers/dehaeze18_sampl_stabil_for_tomog_exper/tikz/img/assemblage_img.png}}; \coordinate[] (aheight) at (assemblage.north west); \coordinate[] (awidth) at (assemblage.south east); \coordinate[] (xrightlabel) at (-0.2, 0); \coordinate[] (xleftlabel) at ($(awidth)+(0.2, 0)$); % Translation Stage \coordinate[] (ty) at ($0.5*(aheight)+0.1*(awidth)$); \draw[<-] (ty) -- (ty-|xrightlabel) node[left, legend]{Translation Stage\\$\SI{-5}{m\metre} < T_y < \SI{5}{m\metre}$}; % Sample Interface \coordinate[] (sampleint) at ($0.77*(aheight)+0.5*(awidth)$); \coordinate[] (sampleintmid) at ($(sampleint)+(-1, -0.5)$); \draw[<-] (sampleint) -- (sampleintmid) -- (sampleintmid-|xrightlabel) node[left, legend]{Sample Interface}; % Sample \coordinate[] (sample) at ($0.9*(aheight)+0.5*(awidth)$); \draw[<-] (sample) -- (sample-|xrightlabel) node[left, legend]{Sample Environment\\$\SI{1}{\kg} < M < \SI{50}{\kg}$}; % Tilt Stage \coordinate[] (tilt) at ($0.55*(aheight)+0.78*(awidth)$); \coordinate[] (tiltmid) at ($(tilt)+(1, 0.5)$); \draw[<-] (tilt) -- (tiltmid) -- (tiltmid-|xleftlabel) node[right, legend]{Tilt Stage\\$\ang{-3} < \theta_y < \ang{3}$}; % Spindle \coordinate[] (spindle) at ($0.53*(aheight)+0.33*(awidth)$); \coordinate[] (spindlemid) at ($(spindle)+(-1, -1.5)$); \draw[<-] (spindle) -- (spindlemid) -- (spindlemid-|xrightlabel) node[left, legend]{Spindle\\$\SI{1}{rpm} < \dot{\theta_z} < \SI{60}{rpm}$}; % Center of gravity compensation \coordinate[] (axisc) at ($0.65*(aheight)+0.65*(awidth)$); \coordinate[] (axiscmid) at ($(axisc)+(1, 1.5)$); \draw[<-] (axisc) -- (axiscmid) -- (axiscmid-|xleftlabel) node[right, legend]{Center of gravity\\compensation system}; % Micro Hexapod \coordinate[] (hexapod) at ($0.52*(aheight)+0.6*(awidth)$); \coordinate[] (hexapodmid) at ($(hexapod)+(1, -1.0)$); \draw[<-] (hexapod) -- (hexapodmid) -- (hexapodmid-|xleftlabel) node[right, legend]{Long Stroke Hexapod\\$\SI{-10}{m\metre} < T_{x y z} < \SI{10}{m\metre}$\\$\ang{-3} < \theta_{x y z} < \ang{3}$}; % Frame \coordinate[] (frame) at ($0.14*(aheight)+0.65*(awidth)$); \draw[<-] (frame) -- (frame-|xleftlabel) node[right, legend]{Frame fixed\\on the granite}; % X-Ray \draw[color=red, ->-=0.7] ($0.92*(aheight)+0.8*(awidth)$) -- node[above, color=black]{X-ray} ++(190:1.8); % Size of the setup \draw[dashed, <->, color=black!70, line width=0.5pt] ($0.03*(aheight)+0.35*(awidth)$) -- node[below, color=black, pos=0.6]{$\approx\SI{1}{m}$} ($0.14*(aheight)+0.98*(awidth)$); \draw[dashed, <->, color=black!70, line width=0.5pt] ($0.032*(aheight)+0.32*(awidth)$) -- node[left, color=black, pos=0.4]{$\approx\SI{1}{m}$} ($0.305*(aheight)+0.0*(awidth)$); % Axis \begin{scope}[shift={(0.0, 0.7)}] \draw[->] (0, 0) -- ++(195:0.8) node[above] {$x$}; \draw[->] (0, 0) -- ++(90:0.9) node[right] {$z$}; \draw[->] (0, 0) -- ++(-40:0.7) node[above] {$y$}; \end{scope} \end{tikzpicture}
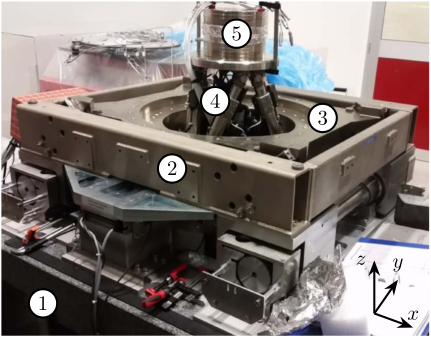
3 Fig 3: Picture of the ID31 end station
\begin{tikzpicture} \node[inner sep=0pt, anchor=south west] (photo) at (0,0) {\includegraphics[width=0.39\textwidth]{/home/thomas/Cloud/thesis/papers/dehaeze18_sampl_stabil_for_tomog_exper/tikz/img/exp_setup_photo.png}}; \coordinate[] (aheight) at (photo.north west); \coordinate[] (awidth) at (photo.south east); \coordinate[] (granite) at ($0.1*(aheight)+0.1*(awidth)$); \coordinate[] (trans) at ($0.5*(aheight)+0.4*(awidth)$); \coordinate[] (tilt) at ($0.65*(aheight)+0.75*(awidth)$); \coordinate[] (hexapod) at ($0.7*(aheight)+0.5*(awidth)$); \coordinate[] (sample) at ($0.9*(aheight)+0.55*(awidth)$); % Granite \node[labelc] at (granite) {1}; % Translation stage \node[labelc] at (trans) {2}; % Tilt Stage \node[labelc] at (tilt) {3}; % Micro-Hexapod \node[labelc] at (hexapod) {4}; % Sample \node[labelc] at (sample) {5}; % Axis \begin{scope}[shift={($0.07*(aheight)+0.87*(awidth)$)}] \draw[->] (0, 0) -- ++(55:0.7) node[above] {$y$}; \draw[->] (0, 0) -- ++(90:0.9) node[left] {$z$}; \draw[->] (0, 0) -- ++(-20:0.7) node[above] {$x$}; \end{scope} \end{tikzpicture}
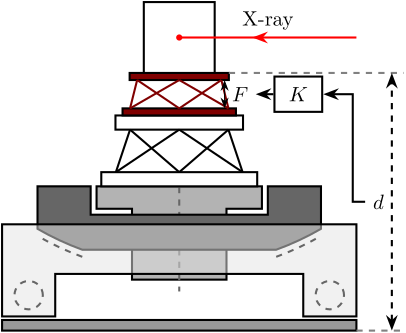
4 Fig 4: Schematic representation of the NASS added below the sample and the control architecture used
5 Fig 5: Transfer function from a force applied by the NASS to the displacement of the sample
6 Fig 6: General control configuration applied to the end station
\begin{tikzpicture} % Blocs \node[block={2.5cm}{2cm}] (P) {P}; \node[block={2.5cm}{2cm}, below=1 of P, scale=0.6] (K) {\[% \begin{pmatrix} K_{T_x} & 0 & \cdots & 0 \\ 0 & \ddots & \ddots & \vdots \\ \vdots & \ddots & \ddots & 0 \\ 0 & \cdots & 0 & K_{\theta_z} \\ \end{pmatrix} \]}; % Block names \node[above] at (P.north) {End Station}; \node[above] at (K.north) {Controller}; % Input and outputs coordinates \coordinate[] (inputw) at ($(P.south west)!0.75!(P.north west)$); \coordinate[] (inputu) at ($(P.south west)!0.25!(P.north west)$); \coordinate[] (outputz) at ($(P.south east)!0.75!(P.north east)$); \coordinate[] (outputv) at ($(P.south east)!0.25!(P.north east)$); % Connections and labels \draw[<-] (inputw) node[above left]{$w$} -- ++(-0.8, 0); \draw[<-] (inputu) node[above left]{$F$} -- ++(-0.8, 0) |- (K.west); \draw[->] (outputz) node[above right]{$z$} -- ++(0.8, 0); \draw[->] (outputv) node[above right]{$d$} -- ++(0.8, 0) |- (K.east); \end{tikzpicture}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}