Encoder Renishaw Vionic - Test Bench
Table of Contents
You can find below the document of:
We would like to characterize the encoder measurement system.
In particular, we would like to measure:
- Bandwidth/dynamics of the sensor
- Power Spectral Density of the measurement noise
- Linearity/resolution of the sensor
1 Encoder Model
The Encoder is characterized by its dynamics \(G_m(s)\) from the “true” displacement \(y\) to measured displacement \(y_m\). Ideally, this dynamics is constant over a wide frequency band with very small phase drop.
It is also characterized by its measurement noise \(n\) that can be described by its Power Spectral Density (PSD).
The model of the encoder is shown in Figure 1.
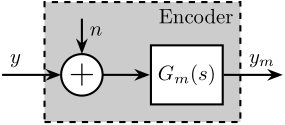
Figure 1: Model of the Encoder
2 Test-Bench Description
To measure the noise \(n\) of the encoder, one can rigidly fix the head and the ruler together such that no motion should be measured. Then, the measured signal \(y_m\) corresponds to the noise \(n\).
In order to measure the linearity, we have to compare the measured displacement with a reference sensor with a known linearity. An interferometer or capacitive sensor should work. An actuator should also be there so impose a displacement.