Nano-Hexapod - Test Bench
Table of Contents
This report is also available as a pdf.
Here are the documentation of the equipment used for this test bench:
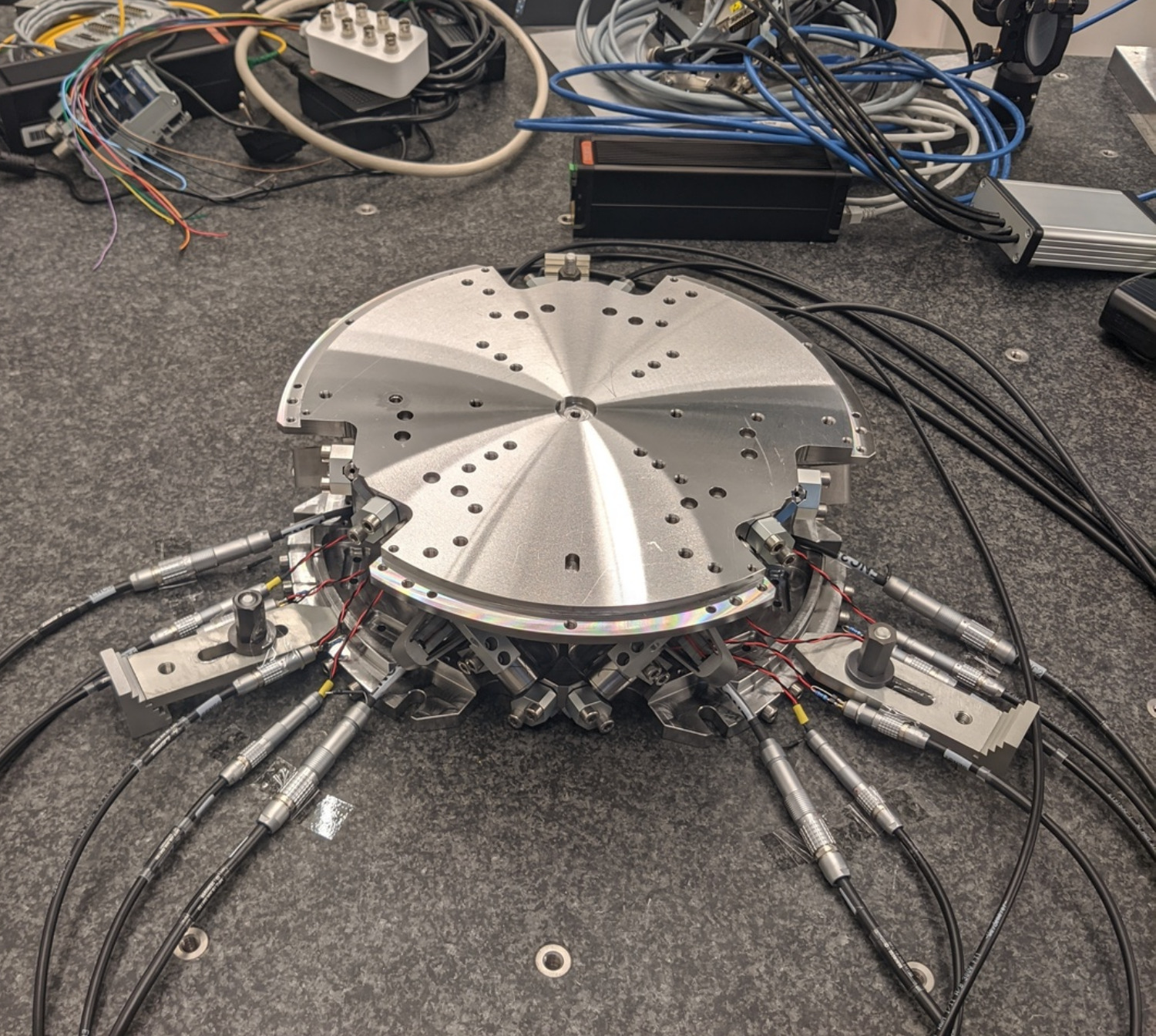
Figure 1: Nano-Hexapod
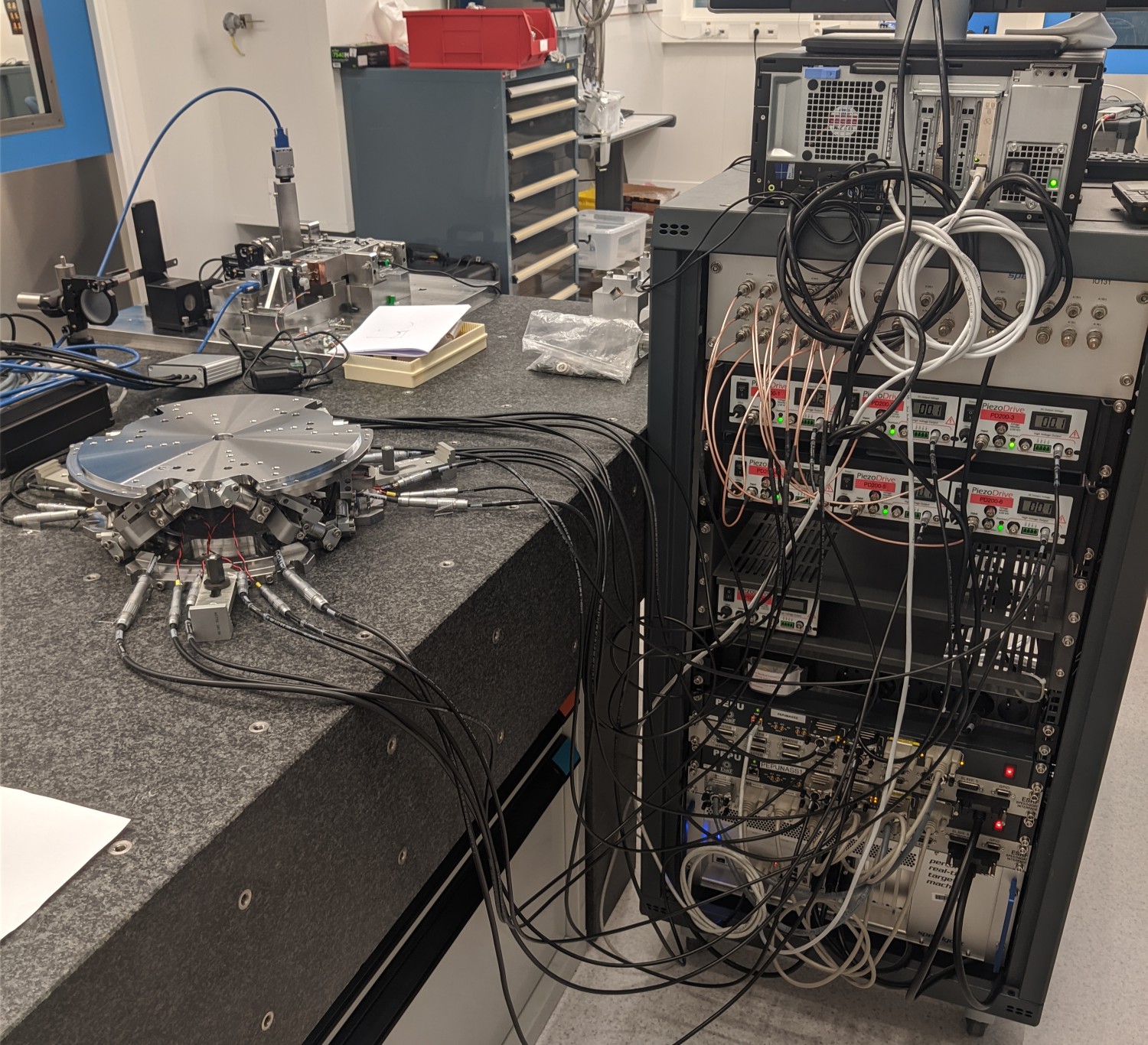
Figure 2: Nano-Hexapod and the control electronics
1 Encoders fixed to the Struts
1.1 Introduction
In this section, the encoders are fixed to the struts.
1.2 Load Data
meas_data_lf = {};
for i = 1:6
meas_data_lf(i) = {load(sprintf('mat/frf_data_exc_strut_%i_noise_lf.mat', i), 't', 'Va', 'Vs', 'de')};
meas_data_hf(i) = {load(sprintf('mat/frf_data_exc_strut_%i_noise_hf.mat', i), 't', 'Va', 'Vs', 'de')};
end
1.3 Spectral Analysis - Setup
% Sampling Time [s] Ts = (meas_data_lf{1}.t(end) - (meas_data_lf{1}.t(1)))/(length(meas_data_lf{1}.t)-1); % Sampling Frequency [Hz] Fs = 1/Ts; % Hannning Windows win = hanning(ceil(1*Fs));
And we get the frequency vector.
[~, f] = tfestimate(meas_data_lf{1}.Va, meas_data_lf{1}.de, win, [], [], 1/Ts);
i_lf = f < 250; % Points for low frequency excitation i_hf = f > 250; % Points for high frequency excitation
1.4 DVF Plant
First, let’s compute the coherence from the excitation voltage and the displacement as measured by the encoders (Figure 3).
%% Coherence coh_dvf_lf = zeros(length(f), 6, 6); coh_dvf_hf = zeros(length(f), 6, 6); for i = 1:6 coh_dvf_lf(:, :, i) = mscohere(meas_data_lf{i}.Va, meas_data_lf{i}.de, win, [], [], 1/Ts); coh_dvf_hf(:, :, i) = mscohere(meas_data_hf{i}.Va, meas_data_hf{i}.de, win, [], [], 1/Ts); end
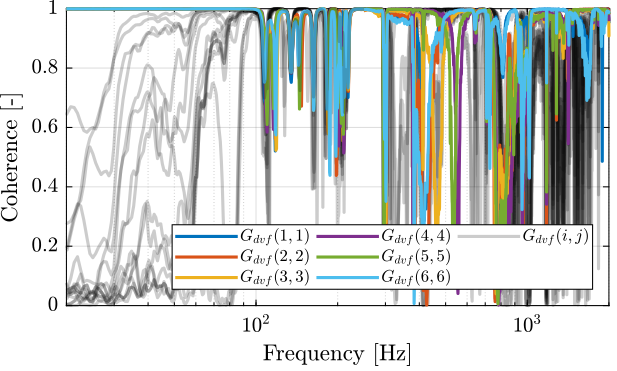
Figure 3: Obtained coherence for the DVF plant
Then the 6x6 transfer function matrix is estimated (Figure 4).
%% DVF Plant G_dvf_lf = zeros(length(f), 6, 6); G_dvf_hf = zeros(length(f), 6, 6); for i = 1:6 G_dvf_lf(:, :, i) = tfestimate(meas_data_lf{i}.Va, meas_data_lf{i}.de, win, [], [], 1/Ts); G_dvf_hf(:, :, i) = tfestimate(meas_data_hf{i}.Va, meas_data_hf{i}.de, win, [], [], 1/Ts); end
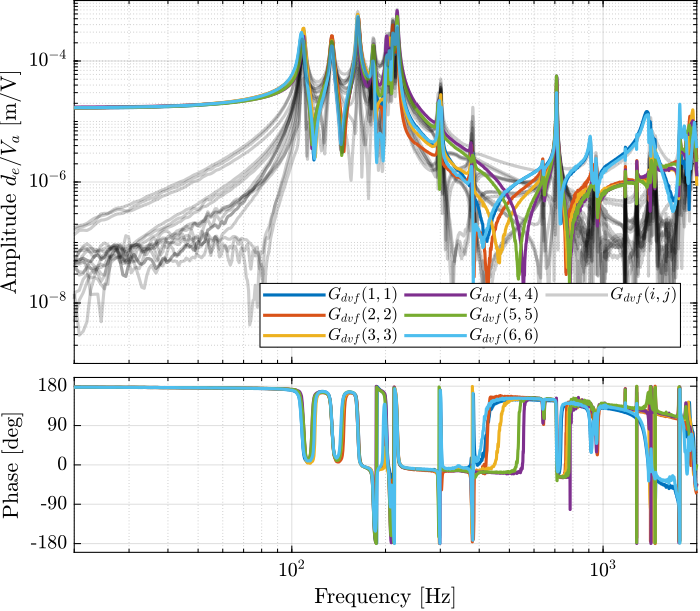
Figure 4: Measured FRF for the DVF plant
1.5 IFF Plant
First, let’s compute the coherence from the excitation voltage and the displacement as measured by the encoders (Figure 5).
%% Coherence coh_iff_lf = zeros(length(f), 6, 6); coh_iff_hf = zeros(length(f), 6, 6); for i = 1:6 coh_iff_lf(:, :, i) = mscohere(meas_data_lf{i}.Va, meas_data_lf{i}.Vs, win, [], [], 1/Ts); coh_iff_hf(:, :, i) = mscohere(meas_data_hf{i}.Va, meas_data_hf{i}.Vs, win, [], [], 1/Ts); end
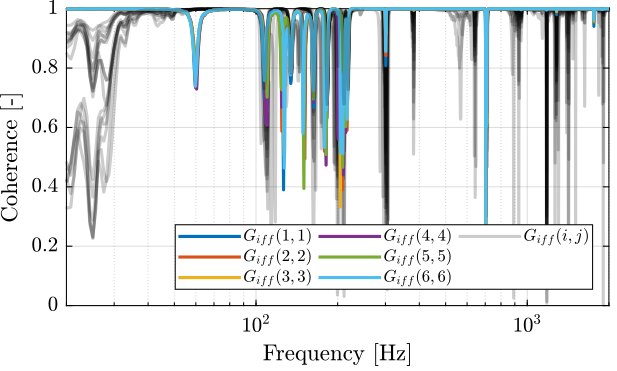
Figure 5: Obtained coherence for the IFF plant
Then the 6x6 transfer function matrix is estimated (Figure 6).
%% IFF Plant G_iff_lf = zeros(length(f), 6, 6); G_iff_hf = zeros(length(f), 6, 6); for i = 1:6 G_iff_lf(:, :, i) = tfestimate(meas_data_lf{i}.Va, meas_data_lf{i}.Vs, win, [], [], 1/Ts); G_iff_hf(:, :, i) = tfestimate(meas_data_hf{i}.Va, meas_data_hf{i}.Vs, win, [], [], 1/Ts); end

Figure 6: Measured FRF for the IFF plant
1.6 Jacobian
The Jacobian is used to transform the excitation force in the cartesian frame as well as the displacements.
Consider the plant shown in Figure 7 with:
- \(\tau\) the 6 input voltages (going to the PD200 amplifier and then to the APA)
- \(d\mathcal{L}\) the relative motion sensor outputs (encoders)
- \(\bm{\tau}_m\) the generated voltage of the force sensor stacks
- \(J_a\) and \(J_s\) the Jacobians for the actuators and sensors

Figure 7: Plant in the cartesian Frame
First, we load the Jacobian matrix (same for the actuators and sensors).
load('jacobian.mat', 'J');
1.6.1 DVF Plant
The transfer function from \(\bm{\mathcal{F}}\) to \(d\bm{\mathcal{X}}\) is computed and shown in Figure 8.
G_dvf_J_lf = permute(pagemtimes(inv(J), pagemtimes(permute(G_dvf_lf, [2 3 1]), inv(J'))), [3 1 2]); G_dvf_J_hf = permute(pagemtimes(inv(J), pagemtimes(permute(G_dvf_hf, [2 3 1]), inv(J'))), [3 1 2]);

Figure 8: Measured FRF for the DVF plant in the cartesian frame
1.6.2 IFF Plant
The transfer function from \(\bm{\mathcal{F}}\) to \(\bm{\mathcal{F}}_m\) is computed and shown in Figure 9.
G_iff_J_lf = permute(pagemtimes(inv(J), pagemtimes(permute(G_iff_lf, [2 3 1]), inv(J'))), [3 1 2]); G_iff_J_hf = permute(pagemtimes(inv(J), pagemtimes(permute(G_iff_hf, [2 3 1]), inv(J'))), [3 1 2]);

Figure 9: Measured FRF for the IFF plant in the cartesian frame