Nano-Hexapod Struts - Test Bench
Table of Contents
- 1. Model of the Amplified Piezoelectric Actuator
- 2. First Basic Measurements
- 3. Dynamical measurements - APA
- 3.1. Speedgoat Setup
- 3.2. Measurements on APA 1
- 3.2.1. Excitation Signal
- 3.2.2. FRF Identification - Setup
- 3.2.3. FRF Identification - Displacement
- 3.2.4. FRF Identification - Force Sensor
- 3.2.5. Hysteresis
- 3.2.6. Estimation of the APA axial stiffness
- 3.2.7. Stiffness change due to electrical connections
- 3.2.8. Effect of the resistor on the IFF Plant
- 3.3. Comparison of all the APA
- 4. Test Bench APA300ML - Simscape Model
- 5. Dynamical measurements - Struts
- 6. Test Bench Struts - Simscape Model
- 7. Function
- 7.1.
initializeBotFlexibleJoint- Initialize Flexible Joint - 7.2.
initializeTopFlexibleJoint- Initialize Flexible Joint - 7.3.
initializeAPA- Initialize APA - 7.4.
generateSweepExc: Generate sweep sinus excitation - 7.5.
generateShapedNoise: Generate Shaped Noise excitation - 7.6.
generateSinIncreasingAmpl: Generate Sinus with increasing amplitude
- 7.1.
This report is also available as a pdf.
In this document, a test-bench is used to characterize the struts of the nano-hexapod.
Each strut includes:
- 2 flexible joints at each ends. This flexible joints have been characterized in a separate test bench.
- one Amplified Piezoelectric Actuator (APA300ML) (described in Section 1)
- one encoder (Renishaw Vionci) that has been characterized in a separate test bench.
The goal here, is to first characterize the APA300ML in terms of:
- The, geometric features, electrical capacitance, stroke, hysteresis, spurious resonances. This is performed in Section 2.
- The dynamics from the voltage applied on the actuator stacks to the induced displacement, and to the measured voltage by the force sensor stack. Also the “actuator constant” and “sensor constant” are identified. This is done in Section 3.
- Compare the measurements with the Simscape models (2DoF, Super-Element) in order to tuned/validate the models. This is explained in Section 4.
Then the struts are mounted, and are fixed to the same measurement bench. Similarly, the goals are to:
- Identify the dynamics from the generated DAC voltage (going to the PD200 voltage amplitifer and then to the actuator stacks) to (Section 5):
- the sensors stack generated voltage
- the measured displacement by the encoder
- the measured displacement by the interferometer
- Compare the measurements with the Simscape model of the struts and tune the models (Section 6)
The final goal of the work presented in this document is to have an accurate Simscape model of the struts that can then be included in the Simscape model of the nano-hexapod.
1 Model of the Amplified Piezoelectric Actuator
The Amplified Piezoelectric Actuator (APA) used is the APA300ML from Cedrat technologies (Figure 1).
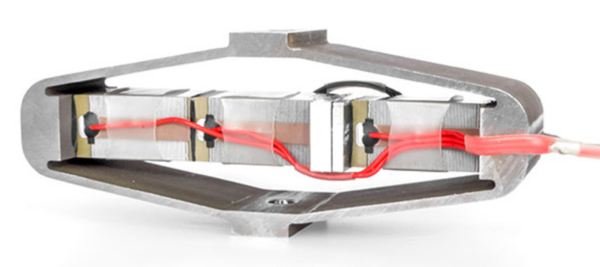
Figure 1: Picture of the APA300ML
Simscape models of the APA300ML are developed:
- Section 1.1: a simple 2 degrees of freedom (DoF) model
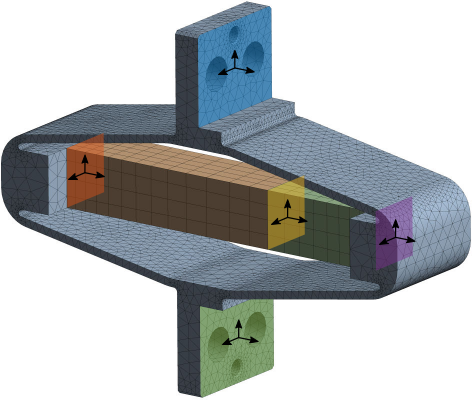
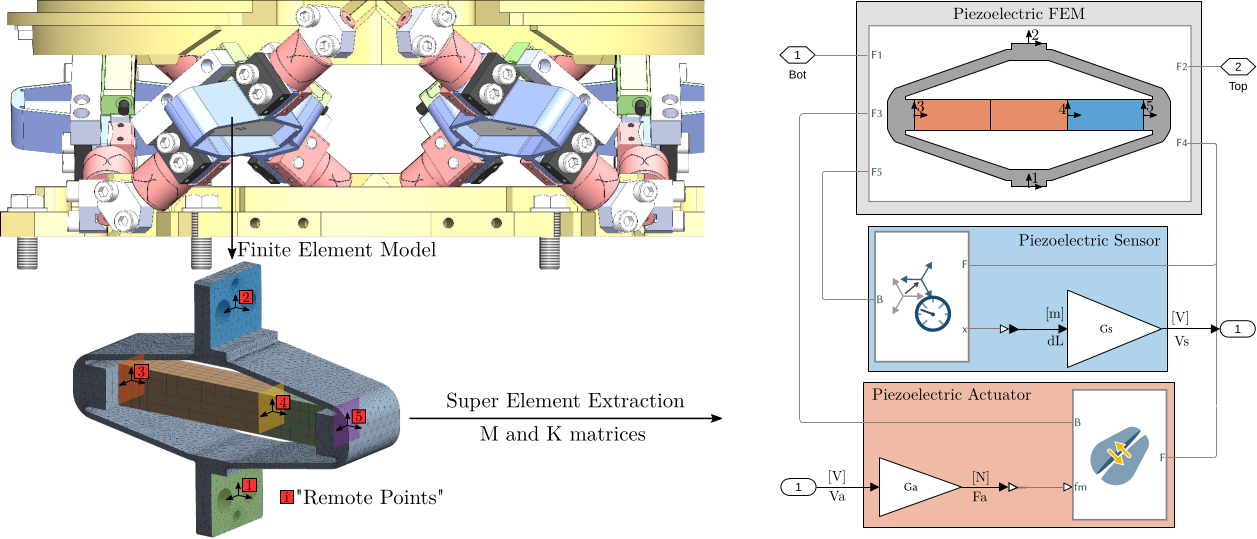
- Section 1.2: a “flexible” model using a “super-element” extracted from a Finite Element Model of the APA
For both models, an “actuator constant” and a “sensor constant” are used. These constants are used to link the electrical domain and the mechanical domain. They are described in Section 1.3.
1.1 Two Degrees of Freedom Model
1.2 Flexible Model
1.3 Actuator and Sensor constants
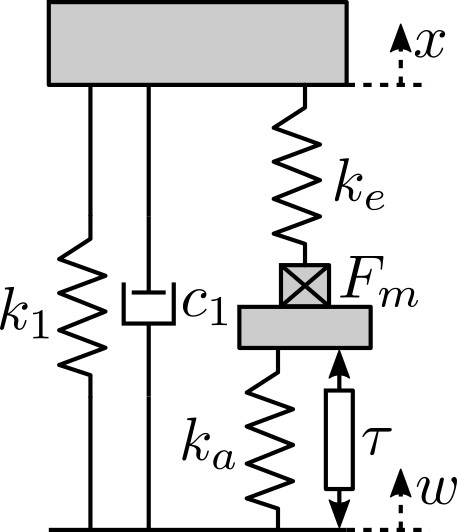
Consider a schematic of the Amplified Piezoelectric Actuator in Figure 5.
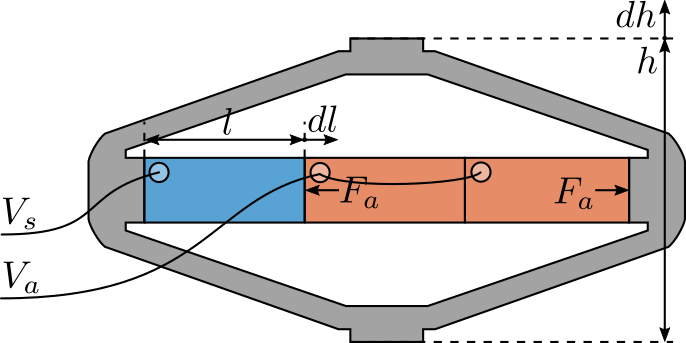
Figure 5: Amplified Piezoelectric Actuator Schematic
A voltage \(V_a\) applied to the actuator stacks will induce an actuator force \(F_a\):
\begin{equation} F_a = g_a \cdot V_a \end{equation}A change of length \(dl\) of the sensor stack will induce a voltage \(V_s\):
\begin{equation} V_s = g_s \cdot dl \end{equation}We wish here to experimental measure \(g_a\) and \(g_s\).
The block-diagram model of the piezoelectric actuator is then as shown in Figure 6.

Figure 6: Model of the APA with Simscape/Simulink
2 First Basic Measurements
2.1 Geometrical Measurements

2.1.1 Measurement Setup
The flatness corresponding to the two interface planes are measured as shown in Figure 8.

Figure 8: Measurement Setup
2.1.2 Measurement Results
The height (Z) measurements at the 8 locations (4 points by plane) are defined below.
apa1 = 1e-6*[0, -0.5 , 3.5 , 3.5 , 42 , 45.5, 52.5 , 46]; apa2 = 1e-6*[0, -2.5 , -3 , 0 , -1.5 , 1 , -2 , -4]; apa3 = 1e-6*[0, -1.5 , 15 , 17.5 , 6.5 , 6.5 , 21 , 23]; apa4 = 1e-6*[0, 6.5 , 14.5 , 9 , 16 , 22 , 29.5 , 21]; apa5 = 1e-6*[0, -12.5, 16.5 , 28.5 , -43 , -52 , -22.5, -13.5]; apa6 = 1e-6*[0, -8 , -2 , 5 , -57.5, -62 , -55.5, -52.5]; apa7 = 1e-6*[0, 19.5 , -8 , -29.5, 75 , 97.5, 70 , 48]; apa7b = 1e-6*[0, 9 , -18.5, -30 , 31 , 46.5, 16.5 , 7.5]; apa = {apa1, apa2, apa3, apa4, apa5, apa6, apa7b};
The X/Y Positions of the 8 measurement points are defined below.
W = 20e-3; % Width [m] L = 61e-3; % Length [m] d = 1e-3; % Distance from border [m] l = 15.5e-3; % [m] pos = [[-L/2 + d; W/2 - d], [-L/2 + l - d; W/2 - d], [-L/2 + l - d; -W/2 + d], [-L/2 + d; -W/2 + d], [L/2 - l + d; W/2 - d], [L/2 - d; W/2 - d], [L/2 - d; -W/2 + d], [L/2 - l + d; -W/2 + d]];
Finally, the flatness is estimated by fitting a plane through the 8 points using the fminsearch command.
apa_d = zeros(1, 7); for i = 1:7 fun = @(x)max(abs(([pos; apa{i}]-[0;0;x(1)])'*([x(2:3);1]/norm([x(2:3);1])))); x0 = [0;0;0]; [x, min_d] = fminsearch(fun,x0); apa_d(i) = min_d; end
The obtained flatness are shown in Table 1.
| Flatness \([\mu m]\) | |
|---|---|
| APA 1 | 8.9 |
| APA 2 | 3.1 |
| APA 3 | 9.1 |
| APA 4 | 3.0 |
| APA 5 | 1.9 |
| APA 6 | 7.1 |
| APA 7 | 18.7 |
2.2 Electrical Measurements
The capacitance of the stacks is measure with the LCR-800 Meter (doc)

Figure 9: LCR Meter used for the measurements
The excitation frequency is set to be 1kHz.
| Sensor Stack | Actuator Stacks | |
|---|---|---|
| APA 1 | 5.10 | 10.03 |
| APA 2 | 4.99 | 9.85 |
| APA 3 | 1.72 | 5.18 |
| APA 4 | 4.94 | 9.82 |
| APA 5 | 4.90 | 9.66 |
| APA 6 | 4.99 | 9.91 |
| APA 7 | 4.85 | 9.85 |
There is clearly a problem with APA300ML number 3
The APA number 3 has ben sent back to Cedrat, and a new APA300ML has been shipped back.
2.3 Stroke measurement
We here wish to estimate the stroke of the APA.
To do so, one side of the APA is fixed, and a displacement probe is located on the other side as shown in Figure 10.
Then, a voltage is applied on either one or two stacks using a DAC and a voltage amplifier.
Here are the documentation of the equipment used for this test bench:
- Voltage Amplifier: PD200 with a gain of 20
- 16bits DAC: IO313 Speedgoat card
- Displacement Probe: Millimar C1216 electronics and Millimar 1318 probe

Figure 10: Bench to measured the APA stroke
2.3.1 Voltage applied on one stack
Let’s first look at the relation between the voltage applied to one stack to the displacement of the APA as measured by the displacement probe.
The applied voltage is shown in Figure 11.
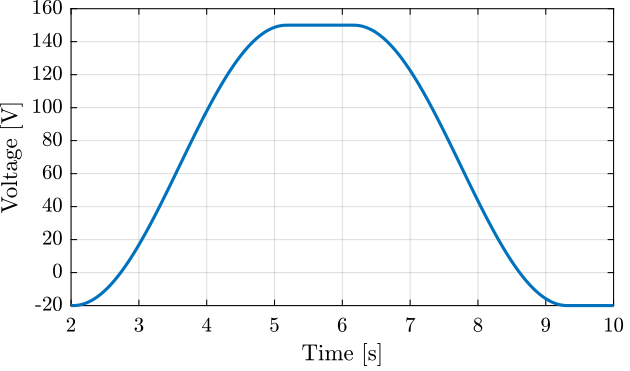
Figure 11: Applied voltage as a function of time
The obtained displacement is shown in Figure 12. The displacement is set to zero at initial time when the voltage applied is -20V.
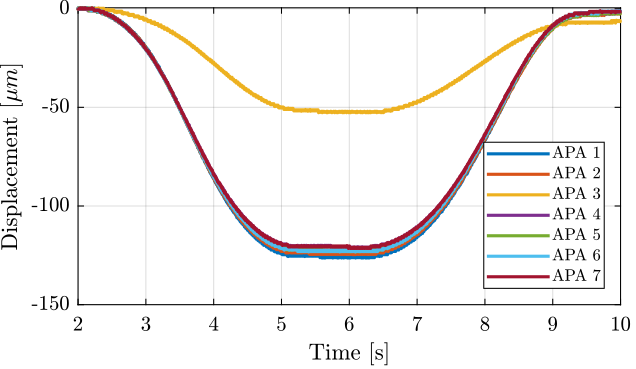
Figure 12: Displacement as a function of time for all the APA300ML
Finally, the displacement is shown as a function of the applied voltage in Figure 13. We can clearly see that there is a problem with the APA 3. Also, there is a large hysteresis.
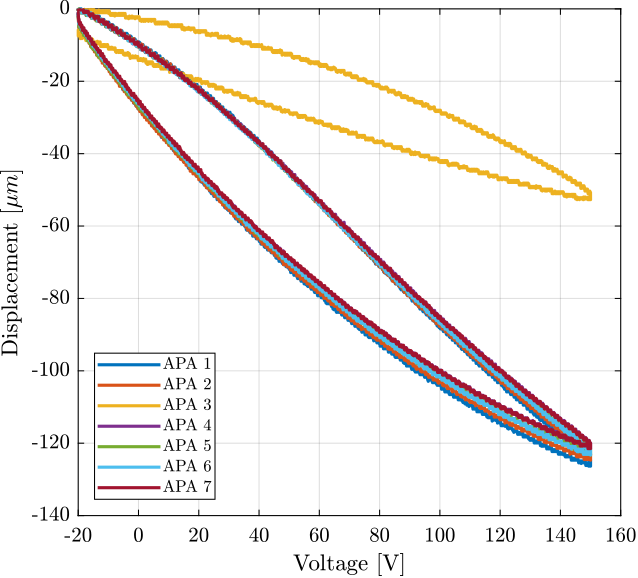
Figure 13: Displacement as a function of the applied voltage
We can clearly see from Figure 13 that there is a problem with the APA number 3.
2.3.2 Voltage applied on two stacks
Now look at the relation between the voltage applied to the two other stacks to the displacement of the APA as measured by the displacement probe.
The obtained displacement is shown in Figure 14. The displacement is set to zero at initial time when the voltage applied is -20V.
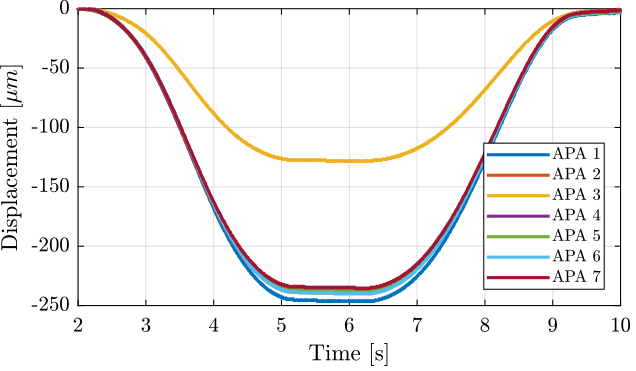
Figure 14: Displacement as a function of time for all the APA300ML
Finally, the displacement is shown as a function of the applied voltage in Figure 15. We can clearly see that there is a problem with the APA 3. Also, there is a large hysteresis.
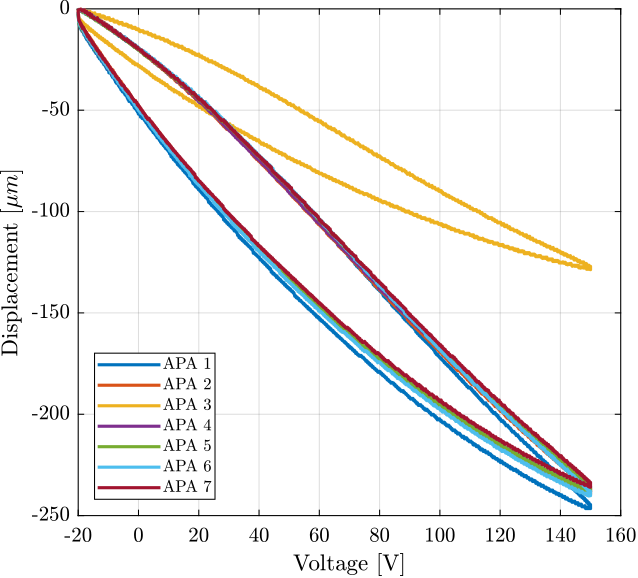
Figure 15: Displacement as a function of the applied voltage
2.3.3 Voltage applied on all three stacks
Finally, we can combine the two measurements to estimate the relation between the displacement and the voltage applied to the three stacks (Figure 16).
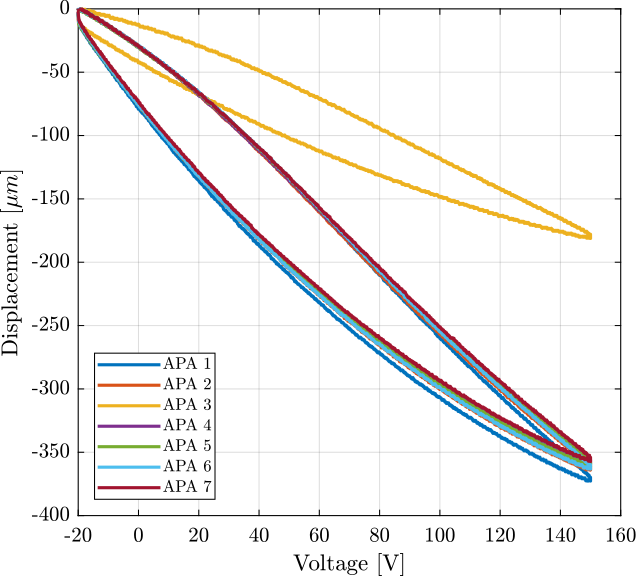
Figure 16: Displacement as a function of the applied voltage
The obtained maximum stroke for all the APA are summarized in Table 3.
| Stroke \([\mu m]\) | |
|---|---|
| APA 1 | 373.2 |
| APA 2 | 365.5 |
| APA 3 | 181.7 |
| APA 4 | 359.7 |
| APA 5 | 361.5 |
| APA 6 | 363.9 |
| APA 7 | 358.4 |
2.4 Spurious resonances
2.4.1 Introduction
Three main resonances are foreseen to be problematic for the control of the APA300ML (Figure 17):
- Mode in X-bending at 189Hz
- Mode in Y-bending at 285Hz
- Mode in Z-torsion at 400Hz
Figure 17: Spurious resonances. a) X-bending mode at 189Hz. b) Y-bending mode at 285Hz. c) Z-torsion mode at 400Hz
These modes are present when flexible joints are fixed to the ends of the APA300ML.
In this section, we try to find the resonance frequency of these modes when one end of the APA is fixed and the other is free.
2.4.2 Setup
The measurement setup is shown in Figure 18. A Laser vibrometer is measuring the difference of motion of two points. The APA is excited with an instrumented hammer and the transfer function from the hammer to the measured rotation is computed.
- Laser Doppler Vibrometer Polytec OFV512
- Instrumented hammer
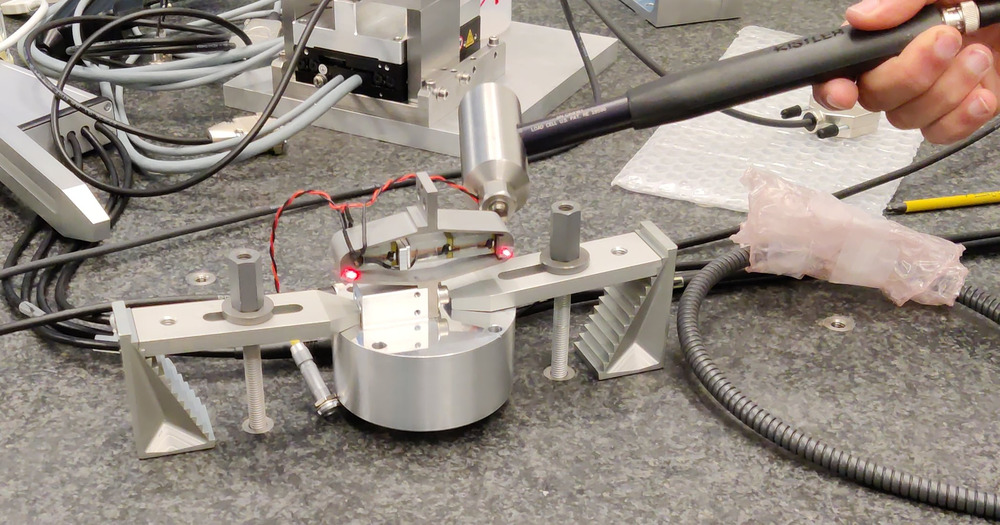
Figure 18: Measurement setup with a Laser Doppler Vibrometer and one instrumental hammer
2.4.3 Bending - X
The setup to measure the X-bending motion is shown in Figure 19. The APA is excited with an instrumented hammer having a solid metallic tip. The impact point is on the back-side of the APA aligned with the top measurement point.
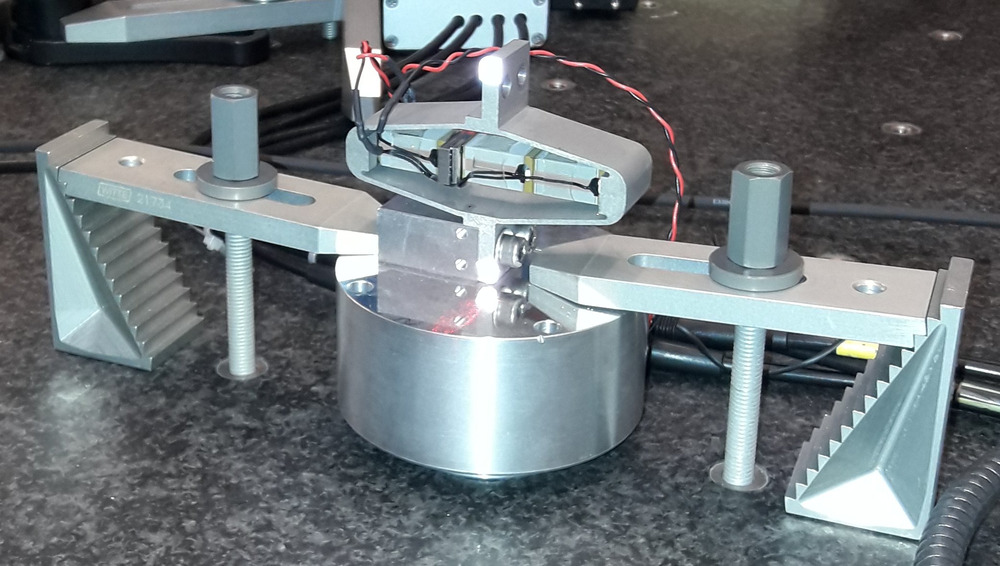
Figure 19: X-Bending measurement setup
The data is loaded.
bending_X = load('apa300ml_bending_X_top.mat');
The config for tfestimate is performed:
Ts = bending_X.Track1_X_Resolution; % Sampling frequency [Hz] win = hann(ceil(1/Ts));
The transfer function from the input force to the output “rotation” (difference between the two measured distances).
[G_bending_X, f] = tfestimate(bending_X.Track1, bending_X.Track2, win, [], [], 1/Ts);
The result is shown in Figure 20.
The can clearly observe a nice peak at 280Hz, and then peaks at the odd “harmonics” (third “harmonic” at 840Hz, and fifth “harmonic” at 1400Hz).
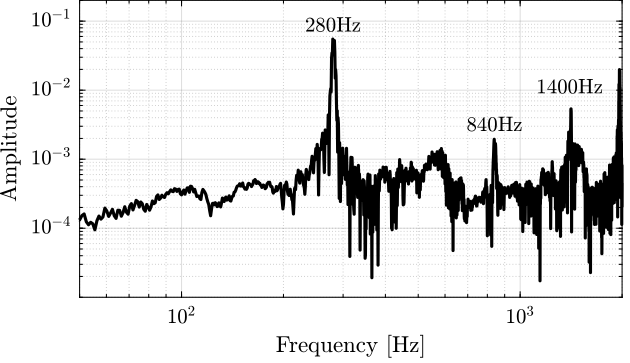
Figure 20: Obtained FRF for the X-bending
2.4.4 Bending - Y
The setup to measure the Y-bending is shown in Figure 21.
The impact point of the instrumented hammer is located on the back surface of the top interface (on the back of the 2 measurements points).
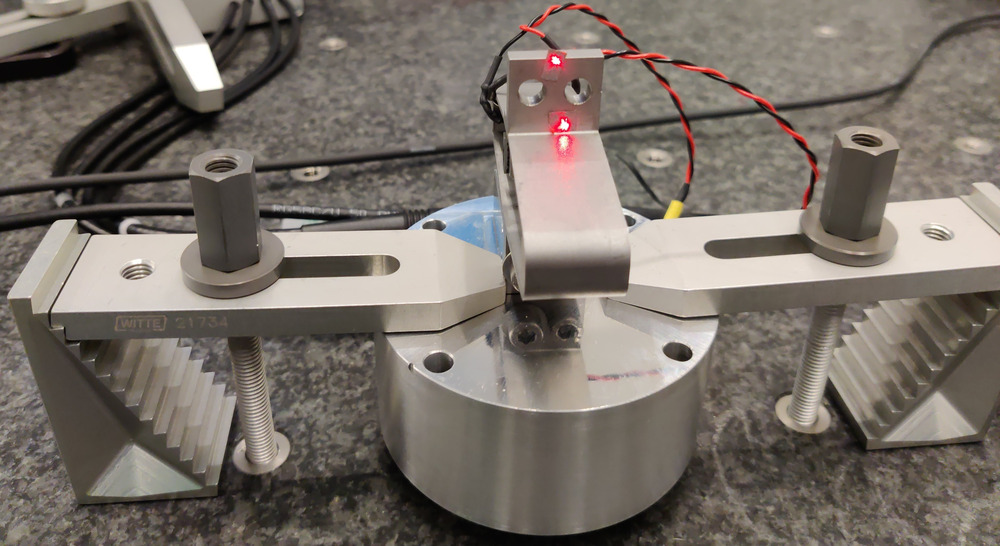
Figure 21: Y-Bending measurement setup
The data is loaded, and the transfer function from the force to the measured rotation is computed.
bending_Y = load('apa300ml_bending_Y_top.mat'); [G_bending_Y, ~] = tfestimate(bending_Y.Track1, bending_Y.Track2, win, [], [], 1/Ts);
The results are shown in Figure 22. The main resonance is at 412Hz, and we also see the third “harmonic” at 1220Hz.
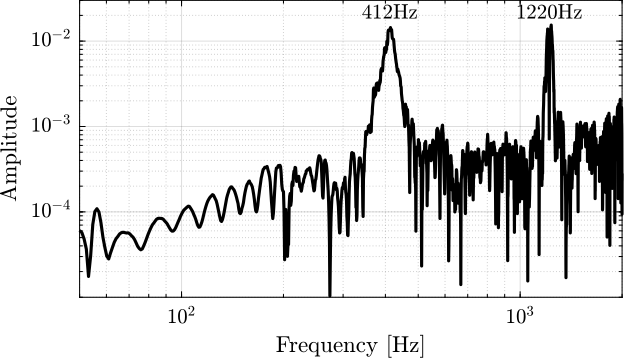
Figure 22: Obtained FRF for the Y-bending
2.4.5 Torsion - Z
Finally, we measure the Z-torsion resonance as shown in Figure 23.
The excitation is shown on the other side of the APA, on the side to excite the torsion motion.
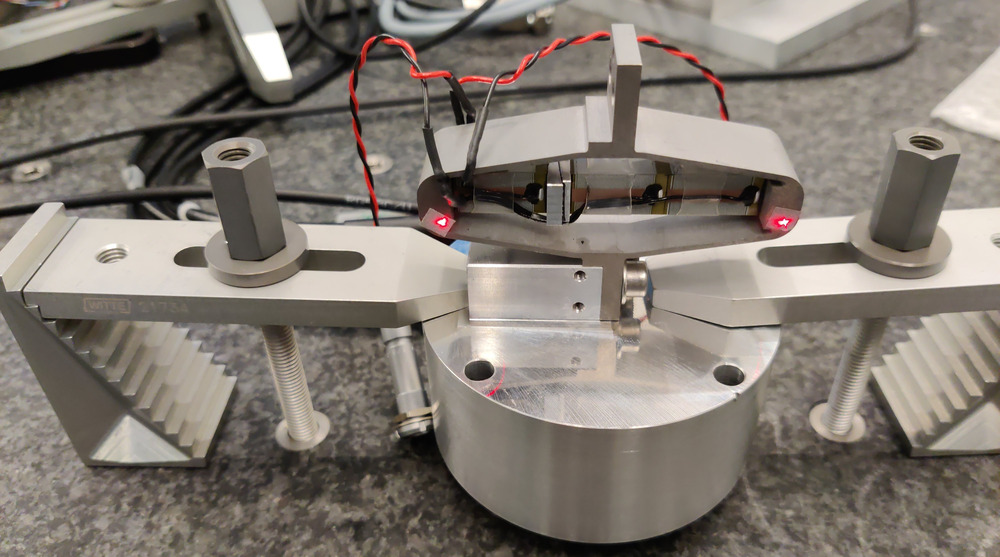
Figure 23: Z-Torsion measurement setup
The data is loaded, and the transfer function computed.
torsion = load('apa300ml_torsion_left.mat'); [G_torsion, ~] = tfestimate(torsion.Track1, torsion.Track2, win, [], [], 1/Ts);
The results are shown in Figure 24. We observe a first peak at 267Hz, which corresponds to the X-bending mode that was measured at 280Hz. And then a second peak at 415Hz, which corresponds to the X-bending mode that was measured at 412Hz. The mode in pure torsion is probably at higher frequency (peak around 1kHz?).
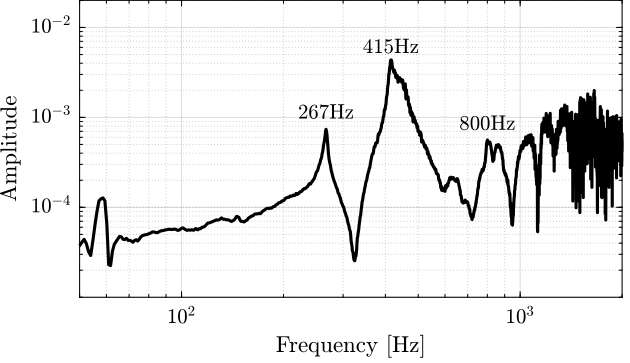
Figure 24: Obtained FRF for the Z-torsion
In order to verify that, the APA is excited on the top part such that the torsion mode should not be excited.
torsion = load('apa300ml_torsion_top.mat'); [G_torsion_top, ~] = tfestimate(torsion.Track1, torsion.Track2, win, [], [], 1/Ts);
The two FRF are compared in Figure 25. It is clear that the first two modes does not correspond to the torsional mode. Maybe the resonance at 800Hz, or even higher resonances. It is difficult to conclude here.
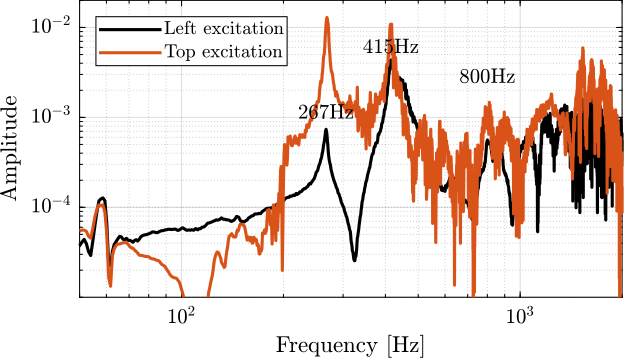
Figure 25: Obtained FRF for the Z-torsion
2.4.6 Compare
The three measurements are shown in Figure 26.
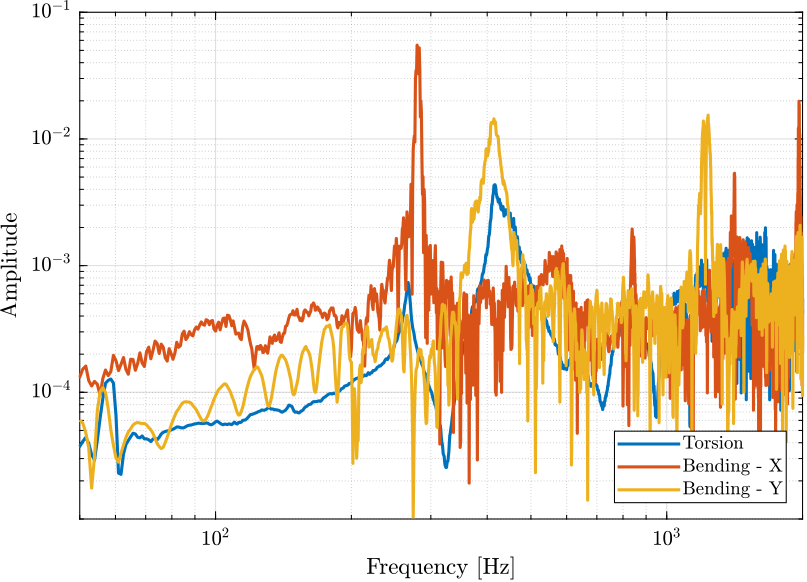
Figure 26: Obtained FRF - Comparison
2.4.7 Conclusion
When two flexible joints are fixed at each ends of the APA, the APA is mostly in a free/free condition in terms of bending/torsion (the bending/torsional stiffness of the joints being very small).
In the current tests, the APA are in a fixed/free condition. Therefore, it is quite obvious that we measured higher resonance frequencies than what is foreseen for the struts. It is however quite interesting that there is a factor \(\approx \sqrt{2}\) between the two (increased of the stiffness by a factor 2?).
| Mode | Strut Mode | Measured Frequency |
|---|---|---|
| X-Bending | 189Hz | 280Hz |
| Y-Bending | 285Hz | 410Hz |
| Z-Torsion | 400Hz | ? |
3 Dynamical measurements - APA
In this section, a measurement test bench is used to extract all the important parameters of the Amplified Piezoelectric Actuator APA300ML.
This include:
- Stroke
- Stiffness
- Hysteresis
- Gain from the applied voltage \(V_a\) to the generated Force \(F_a\)
- Gain from the sensor stack strain \(\delta L\) to the generated voltage \(V_s\)
- Dynamical behavior
The bench is shown in Figure 27, and a zoom picture on the APA and encoder is shown in Figure 28.
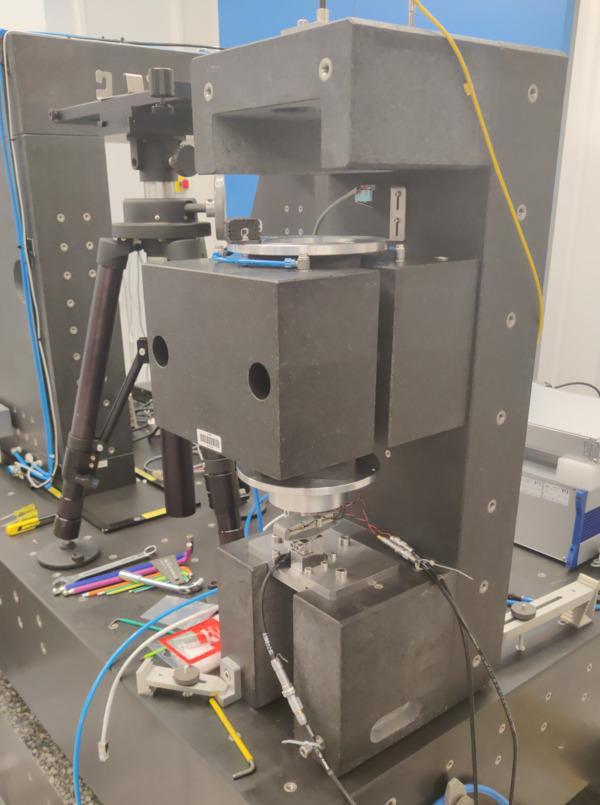
Figure 27: Picture of the test bench
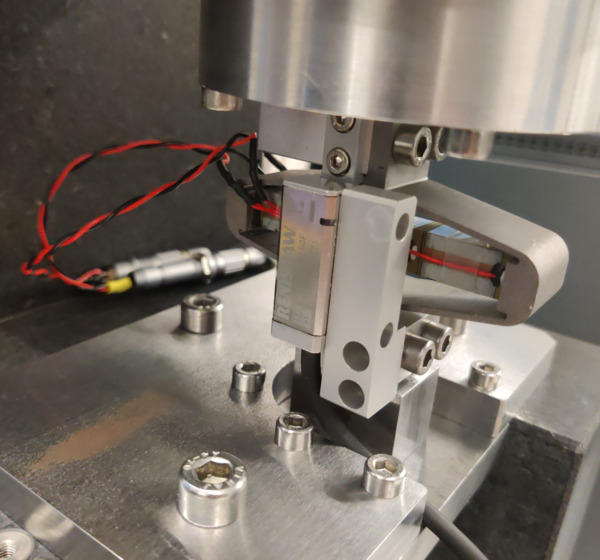
Figure 28: Zoom on the APA with the encoder
Here are the documentation of the equipment used for this test bench:
- Voltage Amplifier: PD200
- Amplified Piezoelectric Actuator: APA300ML
- DAC/ADC: Speedgoat IO313
- Encoder: Renishaw Vionic and used Ruler
- Interferometer: Attocube IDS3010
The bench is schematically shown in Figure 29 and the signal used are summarized in Table 5.
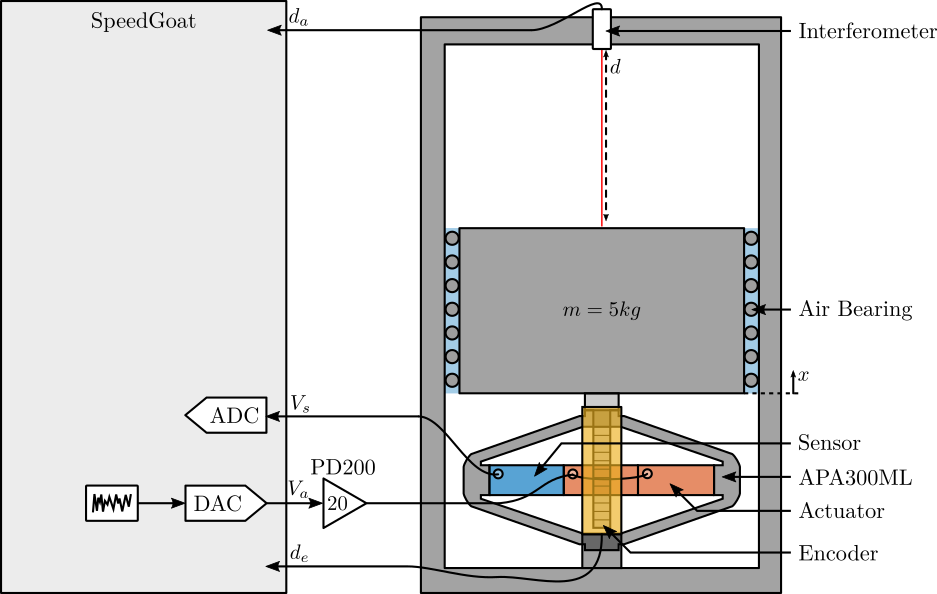
Figure 29: Schematic of the Test Bench
| Variable | Description | Unit | Hardware |
|---|---|---|---|
Va |
Output DAC voltage | [V] | DAC - Ch. 1 => PD200 => APA |
Vs |
Measured stack voltage (ADC) | [V] | APA => ADC - Ch. 1 |
de |
Encoder Measurement | [m] | PEPU Ch. 1 - IO318(1) - Ch. 1 |
da |
Attocube Measurement | [m] | PEPU Ch. 2 - IO318(1) - Ch. 2 |
t |
Time | [s] |
This section is structured as follows:
3.1 Speedgoat Setup
3.1.1 frf_setup.m - Measurement Setup
First is defined the sampling frequency:
%% Simulation configuration Fs = 10e3; % Sampling Frequency [Hz] Ts = 1/Fs; % Sampling Time [s]
%% Data record configuration Trec_start = 5; % Start time for Recording [s] Trec_dur = 100; % Recording Duration [s]
Tsim = 2*Trec_start + Trec_dur; % Simulation Time [s]
A white noise excitation signal can be very useful in order to obtain a first idea of the plant FRF. The gain can be gradually increased until satisfactory output is obtained.
%% Shaped Noise V_noise = generateShapedNoise('Ts', 1/Fs, ... 'V_mean', 3.25, ... 't_start', Trec_start, ... 'exc_duration', Trec_dur, ... 'smooth_ends', true, ... 'V_exc', 0.05/(1 + s/2/pi/10));
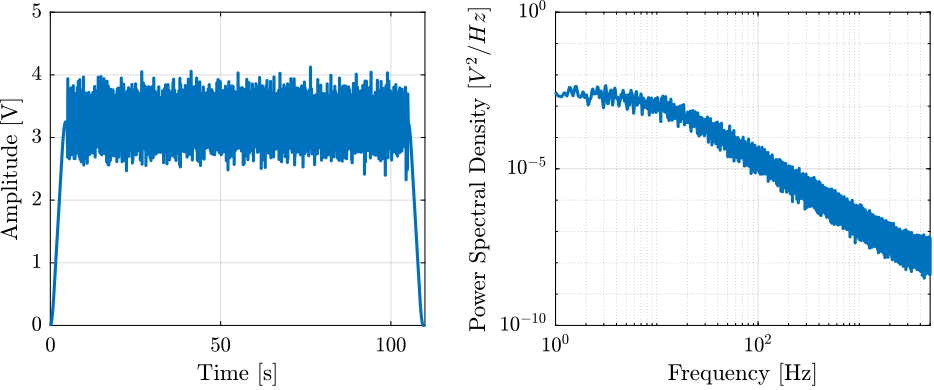
Figure 30: Example of Shaped noise excitation signal
The maximum excitation voltage at resonance is 9Vrms, therefore corresponding to 0.6V of output DAC voltage.
%% Sweep Sine gc = 0.1; xi = 0.5; wn = 2*pi*94.3; % Notch filter at the resonance of the APA G_sweep = 0.2*(s^2 + 2*gc*xi*wn*s + wn^2)/(s^2 + 2*xi*wn*s + wn^2); V_sweep = generateSweepExc('Ts', Ts, ... 'f_start', 10, ... 'f_end', 400, ... 'V_mean', 3.25, ... 't_start', Trec_start, ... 'exc_duration', Trec_dur, ... 'sweep_type', 'log', ... 'V_exc', G_sweep*1/(1 + s/2/pi/500));
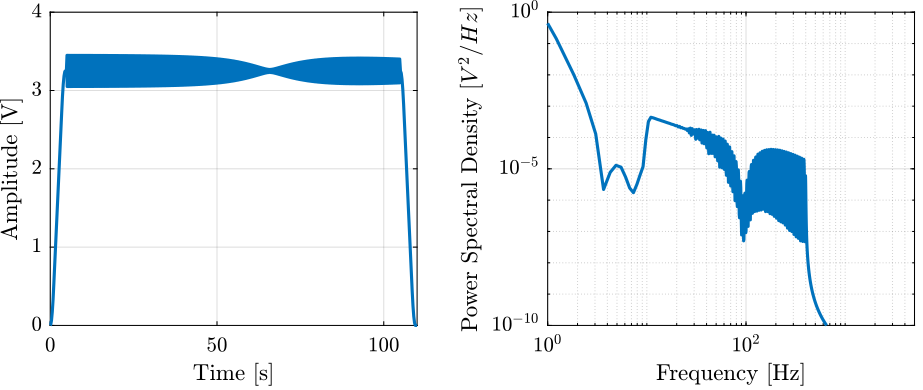
Figure 31: Example of Sweep Sin excitation signal
In order to better estimate the high frequency dynamics, a band-limited noise can be used (Figure 32). The frequency content of the noise can be precisely controlled.
%% High Frequency Shaped Noise [b,a] = cheby1(10, 2, 2*pi*[300 2e3], 'bandpass', 's'); wL = 0.005*tf(b, a); V_noise_hf = generateShapedNoise('Ts', 1/Fs, ... 'V_mean', 3.25, ... 't_start', Trec_start, ... 'exc_duration', Trec_dur, ... 'smooth_ends', true, ... 'V_exc', wL);
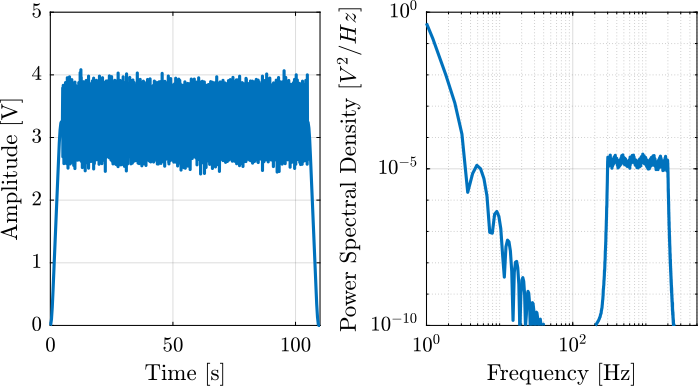
Figure 32: Example of band-limited noise excitation signal
Then a sinus excitation can be used to estimate the hysteresis.
%% Sinus excitation with increasing amplitude V_sin = generateSinIncreasingAmpl('Ts', 1/Fs, ... 'V_mean', 3.25, ... 'sin_ampls', [0.1, 0.2, 0.4, 1, 2, 4], ... 'sin_period', 1, ... 'sin_num', 5, ... 't_start', Trec_start, ... 'smooth_ends', true);
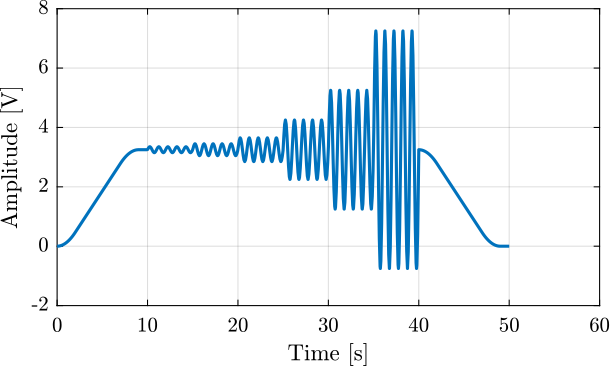
Figure 33: Example of Shaped noise excitation signal
Then, we select the wanted excitation signal.
%% Select the excitation signal V_exc = timeseries(V_noise(2,:), V_noise(1,:));
%% Save data that will be loaded in the Simulink file save('./frf_data.mat', 'Fs', 'Ts', 'Tsim', 'Trec_start', 'Trec_dur', 'V_exc');
3.1.2 frf_save.m - Save Data
First, we get data from the Speedgoat:
tg = slrt;
f = SimulinkRealTime.openFTP(tg);
mget(f, 'data/data.dat');
close(f);
And we load the data on the Workspace:
data = SimulinkRealTime.utils.getFileScopeData('data/data.dat').data; da = data(:, 1); % Excitation Voltage (input of PD200) [V] de = data(:, 2); % Measured voltage (force sensor) [V] Vs = data(:, 3); % Measurment displacement (encoder) [m] Va = data(:, 4); % Measurement displacement (attocube) [m] t = data(:, end); % Time [s]
And we save this to a mat file:
apa_number = 1; save(sprintf('mat/frf_data_%i_huddle.mat', apa_number), 't', 'Va', 'Vs', 'de', 'da');
3.2 Measurements on APA 1
Measurements are first performed on only one APA. Once the measurement procedure is validated, it is performed on all the other APA.
3.2.1 Excitation Signal
For this first measurement, a basic logarithmic sweep is used between 10Hz and 2kHz.
The data are loaded.
apa_sweep = load(sprintf('mat/frf_data_%i_sweep.mat', 1), 't', 'Va', 'Vs', 'da', 'de');
The initial time is set to zero.
%% Time vector t = apa_sweep.t - apa_sweep.t(1) ; % Time vector [s]
The excitation signal is shown in Figure 34. It is a sweep sine from 10Hz up to 2kHz filtered with a notch centered with the main resonance of the system and a low pass filter.
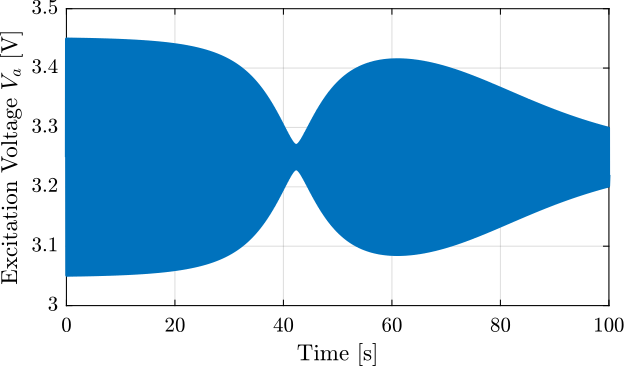
Figure 34: Excitation voltage
3.2.2 FRF Identification - Setup
Let’s define the sampling time/frequency.
%% Sampling Ts = (t(end) - t(1))/(length(t)-1); % Sampling Time [s] Fs = 1/Ts; % Sampling Frequency [Hz]
Then we defined a “Hanning” windows that will be used for the spectral analysis:
win = hanning(ceil(1*Fs)); % Hannning Windows
We get the frequency vector that will be the same for all the frequency domain analysis.
% Only used to have the frequency vector "f" [~, f] = tfestimate(apa_sweep.Va, apa_sweep.de, win, [], [], 1/Ts);
3.2.3 FRF Identification - Displacement
In this section, the transfer function from the excitation voltage \(V_a\) to the encoder measured displacement \(d_e\) and interferometer measurement \(d_a\).
The coherence from \(V_a\) to \(d_e\) is computed and shown in Figure 35. It is quite good from 10Hz up to 500Hz.
%% TF - Encoder [coh_sweep, ~] = mscohere(apa_sweep.Va, apa_sweep.de, win, [], [], 1/Ts);
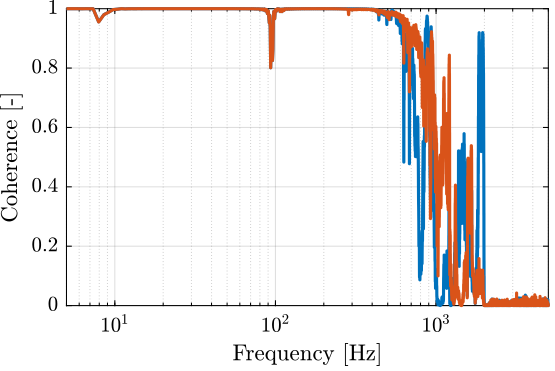
Figure 35: Coherence for the identification from \(V_a\) to \(d_e\)
The transfer functions are then estimated and shown in Figure 36.
%% TF - Encoder [dvf_sweep, ~] = tfestimate(apa_sweep.Va, apa_sweep.de, win, [], [], 1/Ts); %% TF - Interferometer [int_sweep, ~] = tfestimate(apa_sweep.Va, apa_sweep.da, win, [], [], 1/Ts);
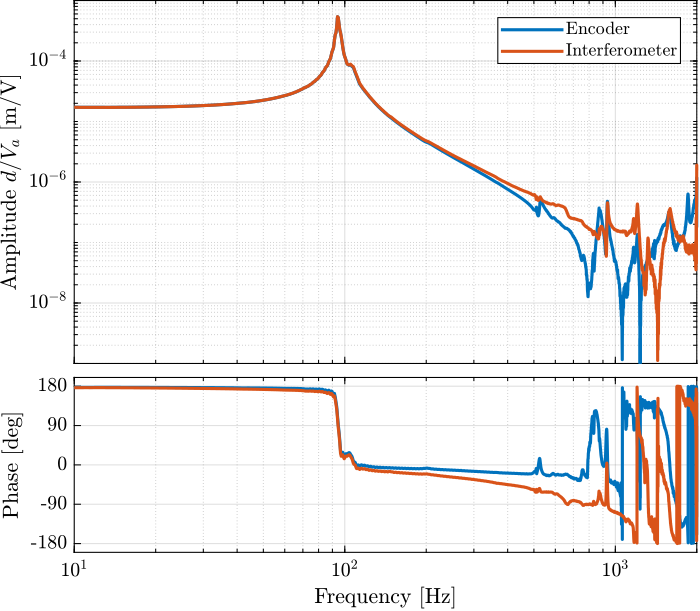
Figure 36: Obtained transfer functions from \(V_a\) to both \(d_e\) and \(d_a\)
It seems that using the interferometer, we have a lot more time delay than when using the encoder.
3.2.4 FRF Identification - Force Sensor
Now the dynamics from excitation voltage \(V_a\) to the force sensor stack voltage \(V_s\) is identified.
The coherence is computed and shown in Figure 37 and found very good from 10Hz up to 2kHz.
%% TF - Encoder [coh_sweep, ~] = mscohere(apa_sweep.Va, apa_sweep.Vs, win, [], [], 1/Ts);
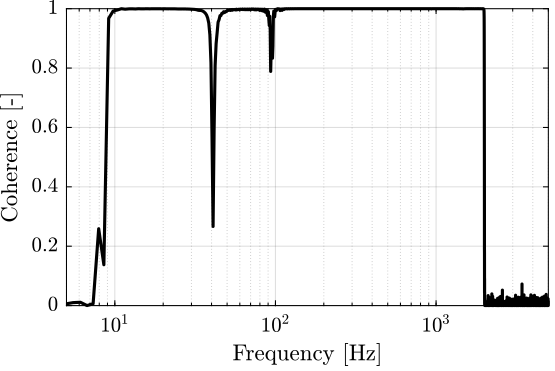
Figure 37: Coherence for the identification from \(V_a\) to \(V_s\)
The transfer function is estimated and shown in Figure 38.
%% Transfer function estimation [iff_sweep, ~] = tfestimate(apa_sweep.Va, apa_sweep.Vs, win, [], [], 1/Ts);
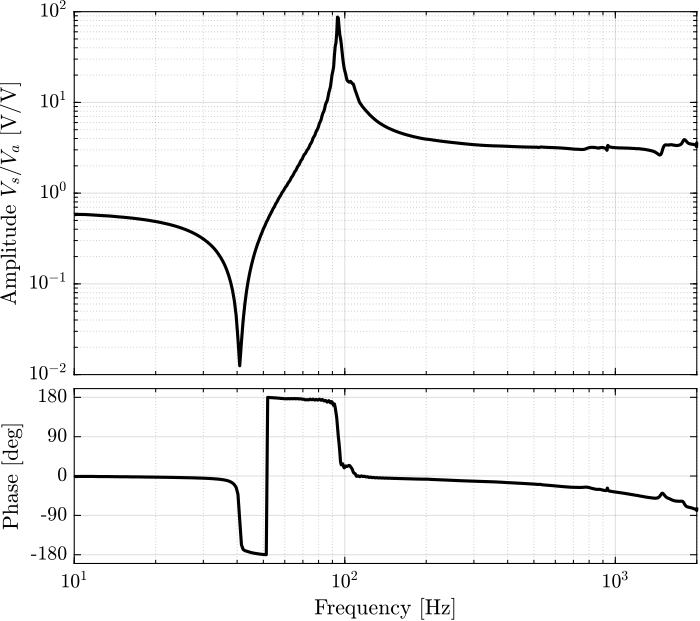
Figure 38: Obtained transfer functions from \(V_a\) to \(V_s\)
3.2.5 Hysteresis
We here wish to visually see the amount of hysteresis present in the APA.
To do so, a quasi static sinusoidal excitation \(V_a\) at different voltages is used.
The offset is 65V, and the sin amplitude is ranging from 1V up to 80V.
For each excitation amplitude, the vertical displacement \(d\) of the mass is measured.
Then, \(d\) is plotted as a function of \(V_a\) for all the amplitudes.
We expect to obtained something like the hysteresis shown in Figure 39.
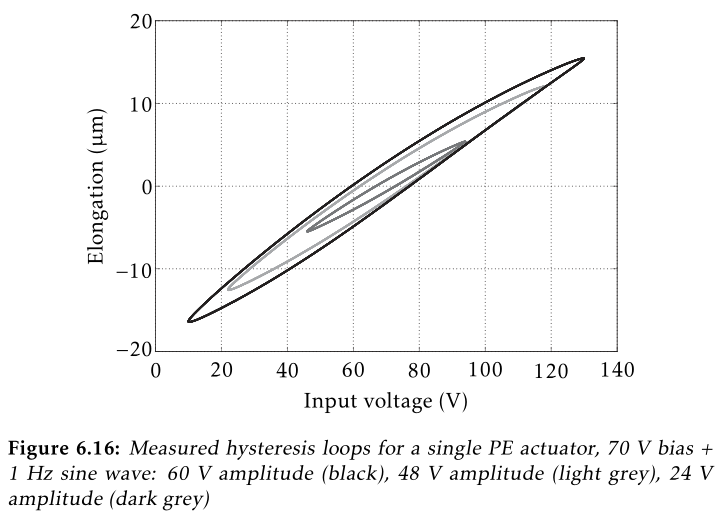
Figure 39: Expected Hysteresis poel10_explor_activ_hard_mount_vibrat
The data is loaded.
apa_hyst = load('frf_data_1_hysteresis.mat', 't', 'Va', 'de'); % Initial time set to zero apa_hyst.t = apa_hyst.t - apa_hyst.t(1);
The excitation voltage amplitudes are:
ampls = [0.1, 0.2, 0.4, 1, 2, 4]; % Excitation voltage amplitudes
The excitation voltage and the measured displacement are shown in Figure 40.
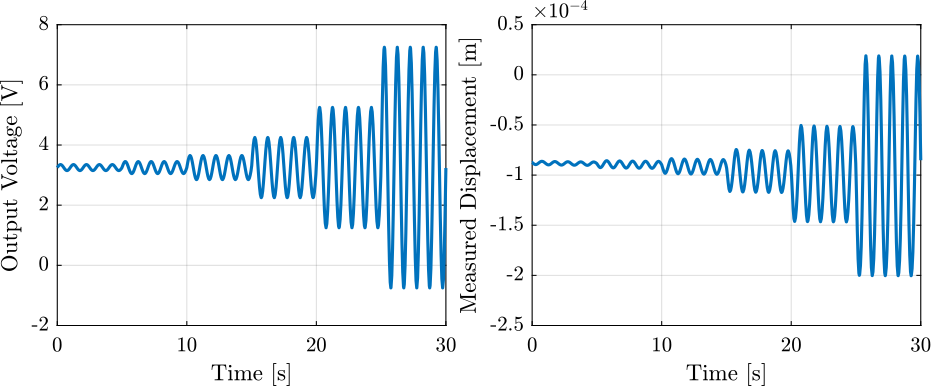
Figure 40: Excitation voltage and measured displacement
For each amplitude, we only take the last sinus in order to reduce possible transients. Also, it is centered on zero.
The measured displacement at a function of the output voltage are shown in Figure 41.
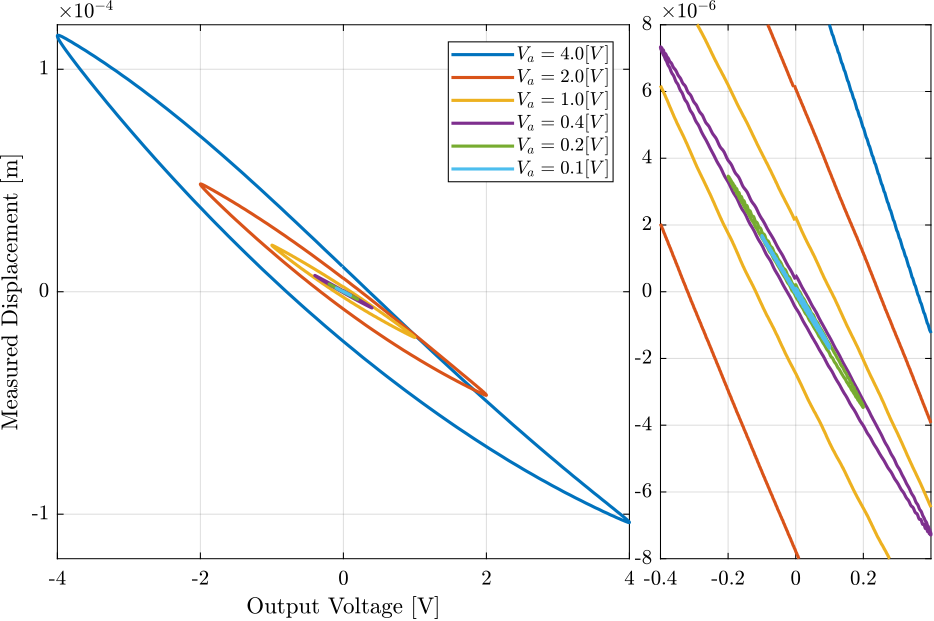
Figure 41: Obtained hysteresis for multiple excitation amplitudes
It is quite clear that hysteresis is increasing with the excitation amplitude.
Also, no hysteresis is found on the sensor stack voltage.
3.2.6 Estimation of the APA axial stiffness
In order to estimate the stiffness of the APA, a weight with known mass \(m_a\) is added on top of the suspended granite and the deflection \(d_e\) is measured using the encoder. The APA stiffness is then:
\begin{equation} k_{\text{apa}} = \frac{m_a g}{d} \end{equation}Here, a mass of 6.4 kg is used:
added_mass = 6.4; % Added mass [kg]
The data is loaded, and the measured displacement is shown in Figure 42.
apa_mass = load(sprintf('frf_data_%i_add_mass_closed_circuit.mat', 1), 't', 'de'); apa_mass.de = apa_mass.de - mean(apa_mass.de(apa_mass.t<11));
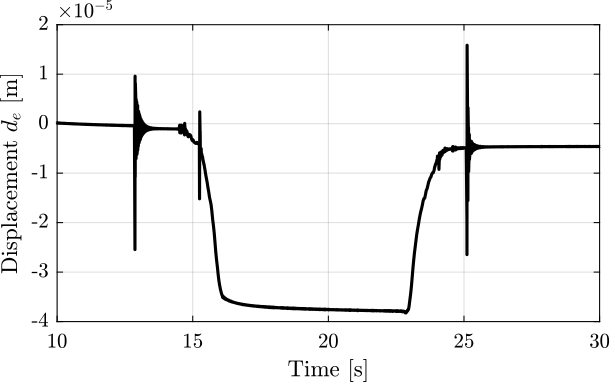
Figure 42: Measured displacement when adding the mass and removing the mass
There is some imprecision in the measurement as there are some drifts that are probably due to some creep.
The stiffness is then computed as follows:
k = 9.8 * added_mass / (mean(apa_mass.de(apa_mass.t > 12 & apa_mass.t < 12.5)) - mean(apa_mass.de(apa_mass.t > 20 & apa_mass.t < 20.5)));
And the stiffness obtained is very close to the one specified in the documentation (\(k = 1.794\,[N/\mu m]\)).
k = 1.68 [N/um]
3.2.7 Stiffness change due to electrical connections
We wish here to see if the stiffness changes when the actuator stacks are not connected to the amplifier and the sensor stacks are not connected to the ADC.
Note here that the resistor in parallel to the sensor stack is present in both cases.
First, the data are loaded.
add_mass_oc = load(sprintf('frf_data_%i_add_mass_open_circuit.mat', 1), 't', 'de'); add_mass_cc = load(sprintf('frf_data_%i_add_mass_closed_circuit.mat', 1), 't', 'de');
And the initial displacement is set to zero.
add_mass_oc.de = add_mass_oc.de - mean(add_mass_oc.de(add_mass_oc.t<11)); add_mass_cc.de = add_mass_cc.de - mean(add_mass_cc.de(add_mass_cc.t<11));
The measured displacements are shown in Figure 43.
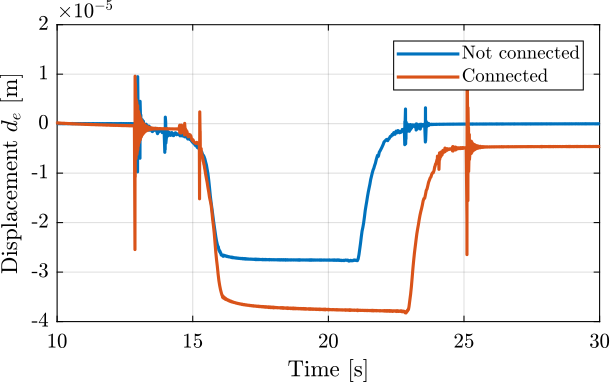
Figure 43: Measured displacement
And the stiffness is estimated in both case. The results are shown in Table 6.
apa_k_oc = 9.8 * added_mass / (mean(add_mass_oc.de(add_mass_oc.t > 12 & add_mass_oc.t < 12.5)) - mean(add_mass_oc.de(add_mass_oc.t > 20 & add_mass_oc.t < 20.5))); apa_k_cc = 9.8 * added_mass / (mean(add_mass_cc.de(add_mass_cc.t > 12 & add_mass_cc.t < 12.5)) - mean(add_mass_cc.de(add_mass_cc.t > 20 & add_mass_cc.t < 20.5)));
| \(k [N/\mu m]\) | |
|---|---|
| Not connected | 2.3 |
| Connected | 1.7 |
Clearly, connecting the actuator stacks to the amplified (basically equivalent as to short circuiting them) lowers the stiffness.
3.2.8 Effect of the resistor on the IFF Plant
A resistor \(R \approx 80.6\,k\Omega\) is added in parallel with the sensor stack. This has the effect to form a high pass filter with the capacitance of the stack.
We here measured the low frequency transfer function from \(V_a\) to \(V_s\) with and without this resistor.
% With the resistor wi_k = load('frf_data_1_sweep_lf_with_R.mat', 't', 'Vs', 'Va'); % Without the resistor wo_k = load('frf_data_1_sweep_lf.mat', 't', 'Vs', 'Va');
We use a very long “Hanning” window for the spectral analysis in order to estimate the low frequency behavior.
win = hanning(ceil(50*Fs)); % Hannning Windows
And we estimate the transfer function from \(V_a\) to \(V_s\) in both cases:
[frf_wo_k, f] = tfestimate(wo_k.Va, wo_k.Vs, win, [], [], 1/Ts); [frf_wi_k, ~] = tfestimate(wi_k.Va, wi_k.Vs, win, [], [], 1/Ts);
With the following values of the resistor and capacitance, we obtain a first order high pass filter with a crossover frequency equal to:
C = 5.1e-6; % Sensor Stack capacitance [F] R = 80.6e3; % Parallel Resistor [Ohm] f0 = 1/(2*pi*R*C); % Crossover frequency of RC HPF [Hz]
f0 = 0.39 [Hz]
The transfer function of the corresponding high pass filter is:
G_hpf = 0.6*(s/2*pi*f0)/(1 + s/2*pi*f0);
Let’s compare the transfer function from actuator stack to sensor stack with and without the added resistor in Figure 44.
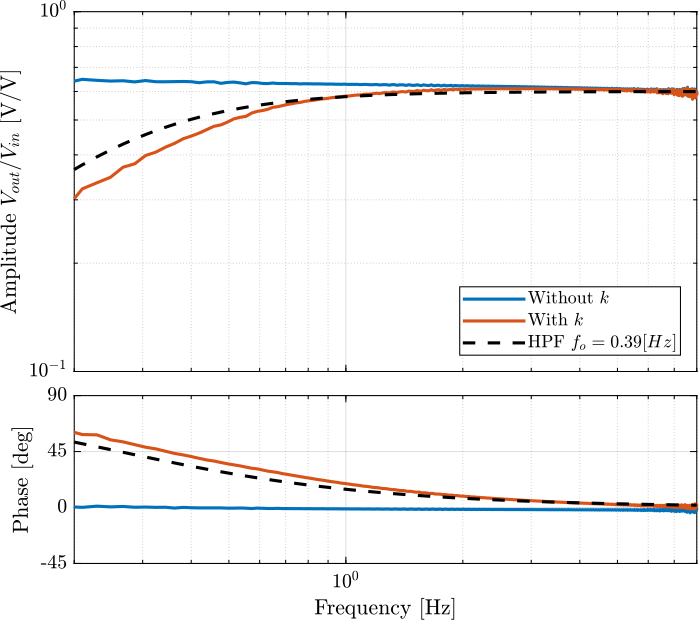
Figure 44: Transfer function from \(V_a\) to \(V_s\) with and without the resistor \(k\)
The added resistor has indeed the expected effect.
3.3 Comparison of all the APA
The same measurements that was performed in Section 3.2 are now performed on all the APA and then compared.
3.3.1 Axial Stiffnesses - Comparison
Let’s first compare the APA axial stiffnesses.
The added mass is:
added_mass = 6.4; % Added mass [kg]
Here are the number of the APA that have been measured:
apa_nums = [1 2 4 5 6 7 8];
The data are loaded.
apa_mass = {};
for i = 1:length(apa_nums)
apa_mass(i) = {load(sprintf('frf_data_%i_add_mass_closed_circuit.mat', apa_nums(i)), 't', 'de')};
% The initial displacement is set to zero
apa_mass{i}.de = apa_mass{i}.de - mean(apa_mass{i}.de(apa_mass{i}.t<11));
end
The raw measurements are shown in Figure 45. All the APA seems to have similar stiffness except the APA 7 which should have an higher stiffness.
It is however strange that the displacement \(d_e\) when the mass is removed is higher for the APA 7 than for the other APA. What could cause that?
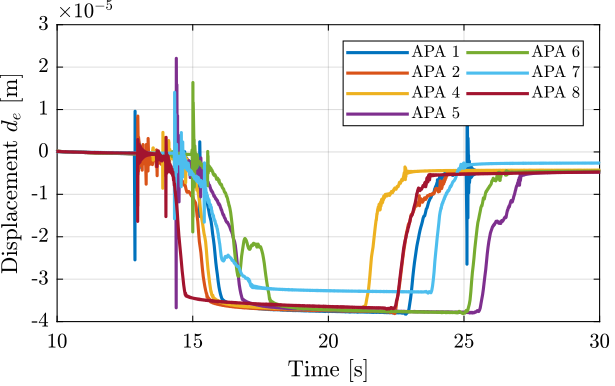
Figure 45: Raw measurements for all the APA. A mass of 6.4kg is added at arround 15s and removed at arround 22s
The stiffnesses are computed for all the APA and are summarized in Table 7.
| APA Num | \(k [N/\mu m]\) |
|---|---|
| 1 | 1.68 |
| 2 | 1.69 |
| 4 | 1.7 |
| 5 | 1.7 |
| 6 | 1.7 |
| 7 | 1.93 |
| 8 | 1.73 |
The APA300ML manual specifies the nominal stiffness to be \(1.8\,[N/\mu m]\) which is very close to what have been measured. Only the APA number 7 is a little bit off.
3.3.2 FRF Identification - Setup
The identification is performed in three steps:
- White noise excitation with small amplitude. This is used to determine the main resonance of the system.
- Sweep sine excitation with the amplitude lowered around the resonance. The sweep sine is from 10Hz to 400Hz.
- High frequency noise. The noise is band-passed between 300Hz and 2kHz.
Then, the result of the second identification is used between 10Hz and 350Hz and the result of the third identification if used between 350Hz and 2kHz.
Here are the APA numbers that have been measured.
apa_nums = [1 2 4 5 6 7 8];
The data are loaded for both the second and third identification:
%% Second identification apa_sweep = {}; for i = 1:length(apa_nums) apa_sweep(i) = {load(sprintf('frf_data_%i_sweep.mat', apa_nums(i)), 't', 'Va', 'Vs', 'de', 'da')}; end %% Third identification apa_noise_hf = {}; for i = 1:length(apa_nums) apa_noise_hf(i) = {load(sprintf('frf_data_%i_noise_hf.mat', apa_nums(i)), 't', 'Va', 'Vs', 'de', 'da')}; end
The time is the same for all measurements.
%% Time vector t = apa_sweep{1}.t - apa_sweep{1}.t(1) ; % Time vector [s] %% Sampling Ts = (t(end) - t(1))/(length(t)-1); % Sampling Time [s] Fs = 1/Ts; % Sampling Frequency [Hz]
Then we defined a “Hanning” windows that will be used for the spectral analysis:
win = hanning(ceil(0.5*Fs)); % Hannning Windows
We get the frequency vector that will be the same for all the frequency domain analysis.
% Only used to have the frequency vector "f" [~, f] = tfestimate(apa_sweep{1}.Va, apa_sweep{1}.de, win, [], [], 1/Ts); i_lf = f <= 350; i_hf = f > 350;
3.3.3 FRF Identification - DVF
In this section, the dynamics from excitation voltage \(V_a\) to encoder measured displacement \(d_e\) is identified.
We compute the coherence for 2nd and 3rd identification:
%% Coherence computation coh_enc = zeros(length(f), length(apa_nums)); for i = 1:length(apa_nums) [coh_lf, ~] = mscohere(apa_sweep{i}.Va, apa_sweep{i}.de, win, [], [], 1/Ts); [coh_hf, ~] = mscohere(apa_noise_hf{i}.Va, apa_noise_hf{i}.de, win, [], [], 1/Ts); coh_enc(:, i) = [coh_lf(i_lf); coh_hf(i_hf)]; end
The coherence is shown in Figure 46. It is clear that the Sweep sine gives good coherence up to 400Hz and that the high frequency noise excitation signal helps increasing a little bit the coherence at high frequency.
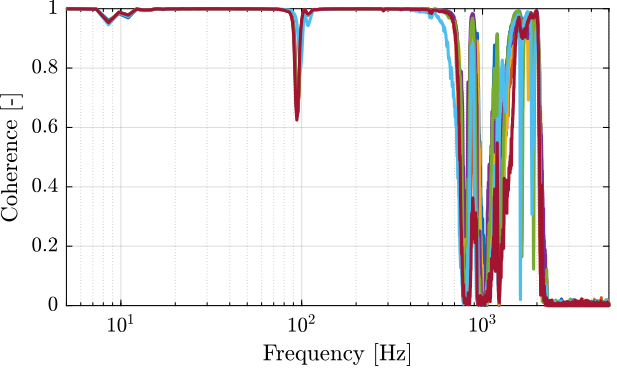
Figure 46: Obtained coherence for the plant from \(V_a\) to \(d_e\)
Then, the transfer function from the DAC output voltage \(V_a\) to the measured displacement by the encoders is computed:
%% Transfer function estimation enc_frf = zeros(length(f), length(apa_nums)); for i = 1:length(apa_nums) [frf_lf, ~] = tfestimate(apa_sweep{i}.Va, apa_sweep{i}.de, win, [], [], 1/Ts); [frf_hf, ~] = tfestimate(apa_noise_hf{i}.Va, apa_noise_hf{i}.de, win, [], [], 1/Ts); enc_frf(:, i) = [frf_lf(i_lf); frf_hf(i_hf)]; end
The obtained transfer functions are shown in Figure 47. They are all superimposed except for the APA7.
Why is the APA7 off? We could think that the APA7 is stiffer, but also the mass line is off.
It seems that there is a “gain” problem. The encoder seems fine (it measured the same as the Interferometer). Maybe it could be due to the amplifier?
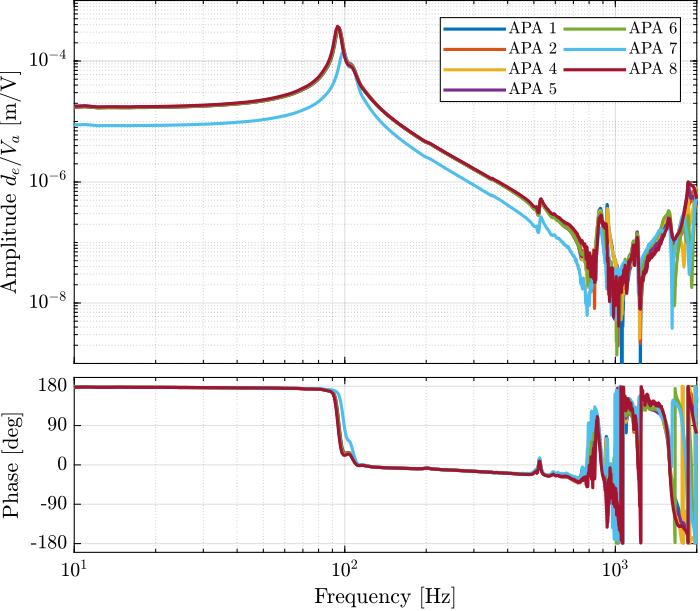
Figure 47: Estimated FRF for the DVF plant (transfer function from \(V_a\) to the encoder \(d_e\))
A zoom on the main resonance is shown in Figure 48. It is clear that expect for the APA 7, the response around the resonances are well matching for all the APA.
It is also clear that there is not a single resonance but two resonances, a first one at 95Hz and a second one at 105Hz.
Why is there a double resonance at around 94Hz?
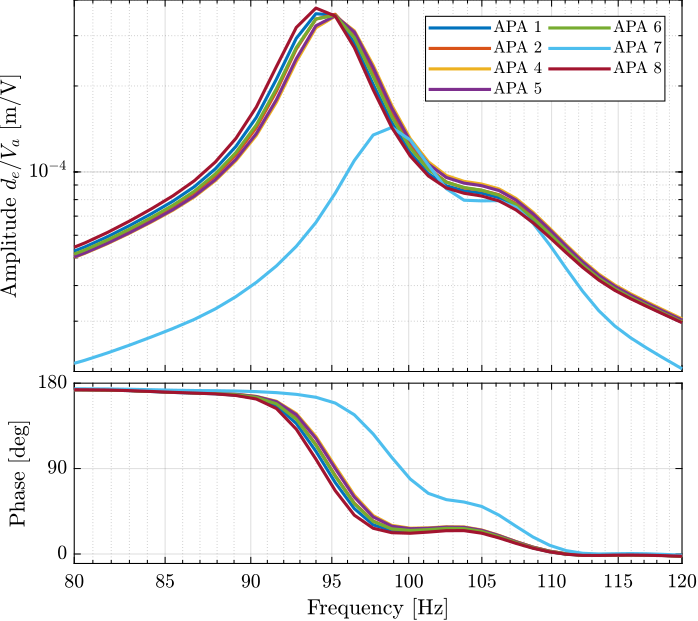
Figure 48: Estimated FRF for the DVF plant (transfer function from \(V_a\) to the encoder \(d_e\)) - Zoom on the main resonance
3.3.4 FRF Identification - IFF
In this section, the dynamics from \(V_a\) to \(V_s\) is identified.
First the coherence is computed and shown in Figure 49. The coherence is very nice from 10Hz to 2kHz. It is only dropping near a zeros at 40Hz, and near the resonance at 95Hz (the excitation amplitude being lowered).
%% Coherence coh_iff = zeros(length(f), length(apa_nums)); for i = 1:length(apa_nums) [coh_lf, ~] = mscohere(apa_sweep{i}.Va, apa_sweep{i}.Vs, win, [], [], 1/Ts); [coh_hf, ~] = mscohere(apa_noise_hf{i}.Va, apa_noise_hf{i}.Vs, win, [], [], 1/Ts); coh_iff(:, i) = [coh_lf(i_lf); coh_hf(i_hf)]; end
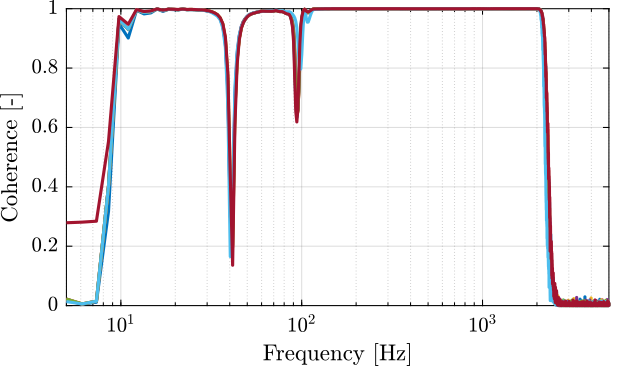
Figure 49: Obtained coherence for the IFF plant
Then the FRF are estimated and shown in Figure 50
%% FRF estimation of the transfer function from Va to Vs iff_frf = zeros(length(f), length(apa_nums)); for i = 1:length(apa_nums) [frf_lf, ~] = tfestimate(apa_sweep{i}.Va, apa_sweep{i}.Vs, win, [], [], 1/Ts); [frf_hf, ~] = tfestimate(apa_noise_hf{i}.Va, apa_noise_hf{i}.Vs, win, [], [], 1/Ts); iff_frf(:, i) = [frf_lf(i_lf); frf_hf(i_hf)]; end
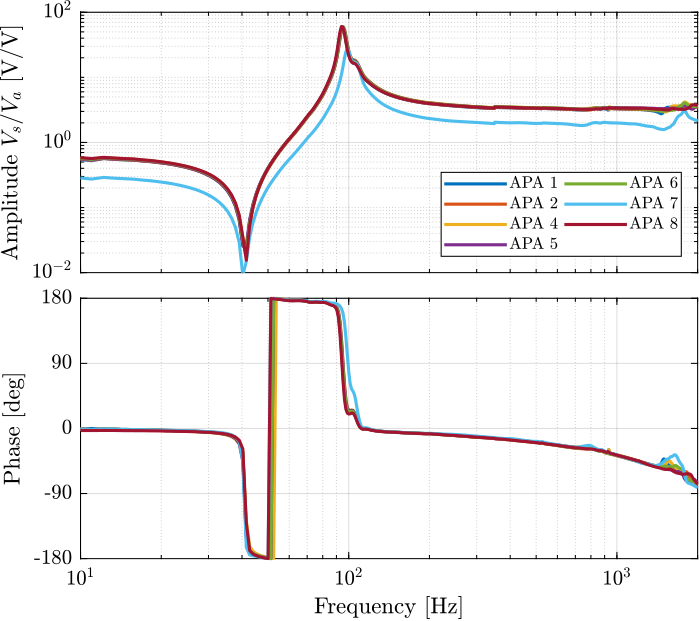
Figure 50: Identified IFF Plant
3.3.5 Save measured FRF
%% Remove the APA 7 (6 in the list) from measurements apa_nums(6) = []; enc_frf(:,6) = []; iff_frf(:,6) = [];
save('mat/meas_apa_frf.mat', 'f', 'Ts', 'enc_frf', 'iff_frf', 'apa_nums');
4 Test Bench APA300ML - Simscape Model
4.1 Introduction
A simscape model (Figure 51) of the measurement bench is used.
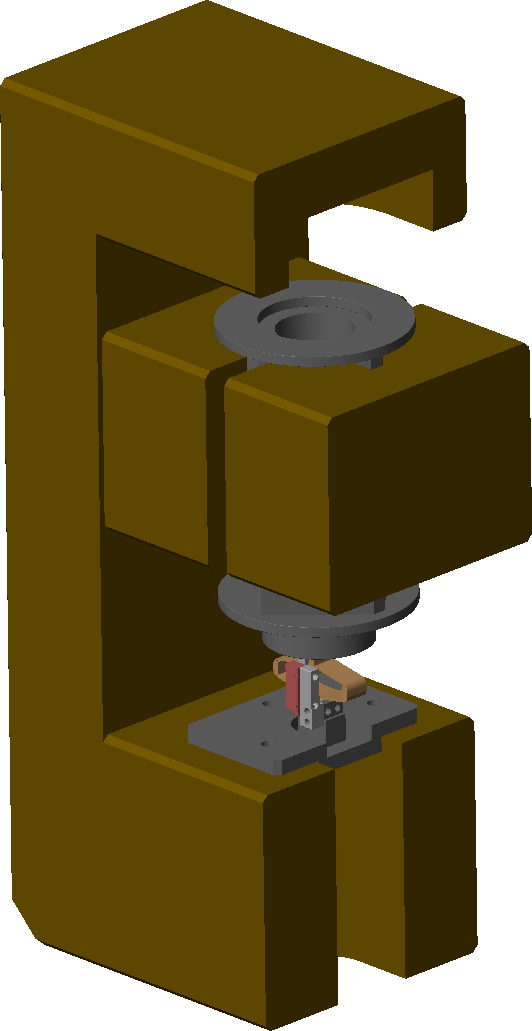
Figure 51: Screenshot of the Simscape model
4.2 First Identification
The APA is first initialized with default parameters and the transfer function from excitation voltage \(V_a\) (before the amplification of 20 due to the PD200 amplifier) to the sensor stack voltage \(V_s\), encoder \(d_L\) and interferometer \(z\) is identified.
%% Initialize the structure containing the data used in the model n_hexapod = struct(); n_hexapod.actuator = initializeAPA('type', '2dof');
%% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Va'], 1, 'openinput'); io_i = io_i + 1; % Actuator Voltage io(io_i) = linio([mdl, '/Vs'], 1, 'openoutput'); io_i = io_i + 1; % Sensor Voltage io(io_i) = linio([mdl, '/dL'], 1, 'openoutput'); io_i = io_i + 1; % Relative Motion Outputs io(io_i) = linio([mdl, '/z'], 1, 'openoutput'); io_i = io_i + 1; % Vertical Motion %% Run the linearization Ga = linearize(mdl, io, 0.0, options); Ga.InputName = {'Va'}; Ga.OutputName = {'Vs', 'dL', 'z'};
The obtain dynamics are shown in Figure 52 and 53.
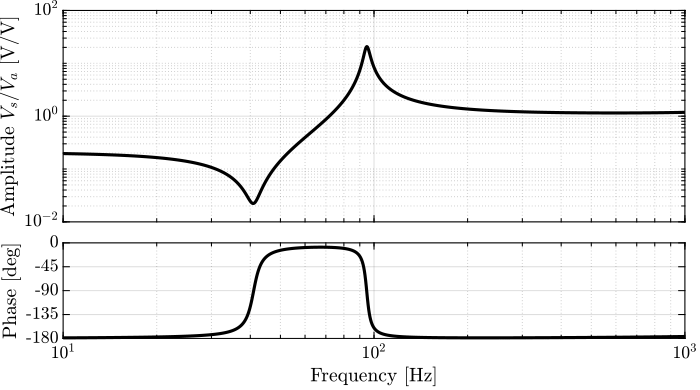
Figure 52: Bode plot of the transfer function from \(V_a\) to \(V_s\)
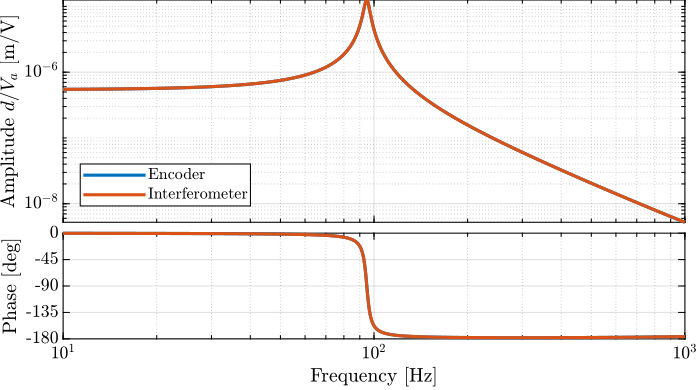
Figure 53: Bode plot of the transfer function from \(V_a\) to \(d_L\) and to \(z\)
4.3 Identify Sensor/Actuator constants and compare with measured FRF
4.3.1 How to identify these constants?
4.3.1.1 Piezoelectric Actuator Constant
Using the measurement test-bench, it is rather easy the determine the static gain between the applied voltage \(V_a\) to the induced displacement \(d\).
\begin{equation} d = g_{d/V_a} \cdot V_a \end{equation}Using the Simscape model of the APA, it is possible to determine the static gain between the actuator force \(F_a\) to the induced displacement \(d\):
\begin{equation} d = g_{d/F_a} \cdot F_a \end{equation}From the two gains, it is then easy to determine \(g_a\):
\begin{equation} g_a = \frac{F_a}{V_a} = \frac{F_a}{d} \cdot \frac{d}{V_a} = \frac{g_{d/V_a}}{g_{d/F_a}} \end{equation}4.3.1.2 Piezoelectric Sensor Constant
Similarly, it is easy to determine the gain from the excitation voltage \(V_a\) to the voltage generated by the sensor stack \(V_s\):
\begin{equation} V_s = g_{V_s/V_a} V_a \end{equation}Note here that there is an high pass filter formed by the piezo capacitor and parallel resistor.
The gain can be computed from the dynamical identification and taking the gain at the wanted frequency (above the first resonance).
Using the simscape model, compute the gain at the same frequency from the actuator force \(F_a\) to the strain of the sensor stack \(dl\):
\begin{equation} dl = g_{dl/F_a} F_a \end{equation}Then, the “sensor” constant is:
\begin{equation} g_s = \frac{V_s}{dl} = \frac{V_s}{V_a} \cdot \frac{V_a}{F_a} \cdot \frac{F_a}{dl} = \frac{g_{V_s/V_a}}{g_a \cdot g_{dl/F_a}} \end{equation}4.3.2 Identification Data
load('meas_apa_frf.mat', 'f', 'Ts', 'enc_frf', 'iff_frf', 'apa_nums');
4.3.3 2DoF APA
4.3.3.1 2DoF APA
%% Initialize a 2DoF APA with Ga=Gs=1 n_hexapod.actuator = initializeAPA('type', '2dof', 'ga', 1, 'gs', 1);
4.3.3.2 Identification without actuator or sensor constants
%% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Va'], 1, 'openinput'); io_i = io_i + 1; % Actuator Voltage io(io_i) = linio([mdl, '/Vs'], 1, 'openoutput'); io_i = io_i + 1; % Sensor Voltage io(io_i) = linio([mdl, '/dL'], 1, 'openoutput'); io_i = io_i + 1; % Relative Motion Outputs io(io_i) = linio([mdl, '/z'], 1, 'openoutput'); io_i = io_i + 1; % Vertical Motion %% Identification Gs = linearize(mdl, io, 0.0, options); Gs.InputName = {'Va'}; Gs.OutputName = {'Vs', 'dL', 'z'};
4.3.3.3 Actuator Constant
%% Estimated Actuator Constant ga = -mean(abs(enc_frf(f>10 & f<20)))./dcgain(Gs('dL', 'Va')); % [N/V]
ga = -32.2 [N/V]
n_hexapod.actuator.Ga = ones(6,1)*ga; % Actuator gain [N/V]
4.3.3.4 Sensor Constant
%% Estimated Sensor Constant gs = -mean(abs(iff_frf(f>400 & f<500)))./(ga*abs(squeeze(freqresp(Gs('Vs', 'Va'), 1e3, 'Hz')))); % [V/m]
gs = 0.088 [V/m]
n_hexapod.actuator.Gs = ones(6,1)*gs; % Sensor gain [V/m]
4.3.3.5 Comparison
Identify the dynamics with included constants.
%% Identify again the dynamics with correct Ga,Gs Gs = linearize(mdl, io, 0.0, options); Gs = Gs*exp(-Ts*s); Gs.InputName = {'Va'}; Gs.OutputName = {'Vs', 'dL', 'z'};

Figure 54: Comparison of the experimental data and Simscape model (\(u\) to \(d\mathcal{L}_m\))
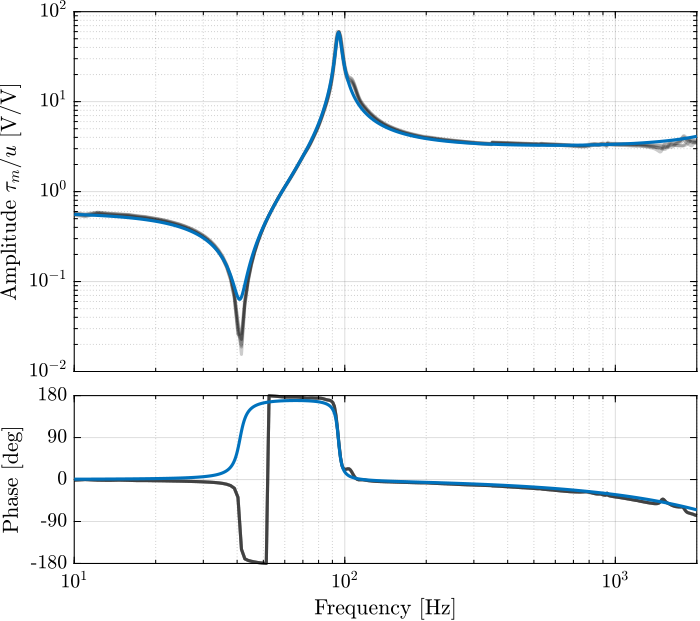
Figure 55: Comparison of the experimental data and Simscape model (\(V_a\) to \(V_s\))
4.3.4 Flexible APA
4.3.4.1 Flexible APA
%% Initialize the APA as a flexible body n_hexapod.actuator = initializeAPA('type', 'flexible', 'ga', 1, 'gs', 1);
4.3.4.2 Identification without actuator or sensor constants
%% Identify the dynamics Gs = linearize(mdl, io, 0.0, options); Gs.InputName = {'Va'}; Gs.OutputName = {'Vs', 'dL', 'z'};
4.3.4.3 Actuator Constant
%% Actuator Constant ga = -mean(abs(enc_frf(f>10 & f<20)))./dcgain(Gs('dL', 'Va')); % [N/V]
ga = 23.5 [N/V]
n_hexapod.actuator.Ga = ones(6,1)*ga; % Actuator gain [N/V]
4.3.4.4 Sensor Constant
%% Sensor Constant gs = -mean(abs(iff_frf(f>400 & f<500)))./(ga*abs(squeeze(freqresp(Gs('Vs', 'Va'), 1e3, 'Hz')))); % [V/m]
gs = -4839841.756 [V/m]
n_hexapod.actuator.Gs = ones(6,1)*gs; % Sensor gain [V/m]
4.3.4.5 Comparison
%% Identify with updated constants Gs = linearize(mdl, io, 0.0, options); Gs = Gs*exp(-Ts*s); Gs.InputName = {'Va'}; Gs.OutputName = {'Vs', 'dL', 'z'};
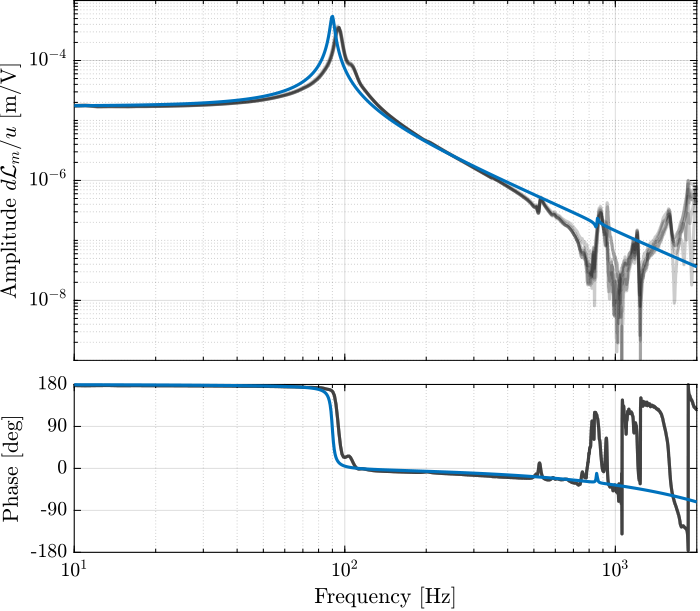
Figure 56: Comparison of the experimental data and Simscape model (\(u\) to \(d\mathcal{L}_m\))
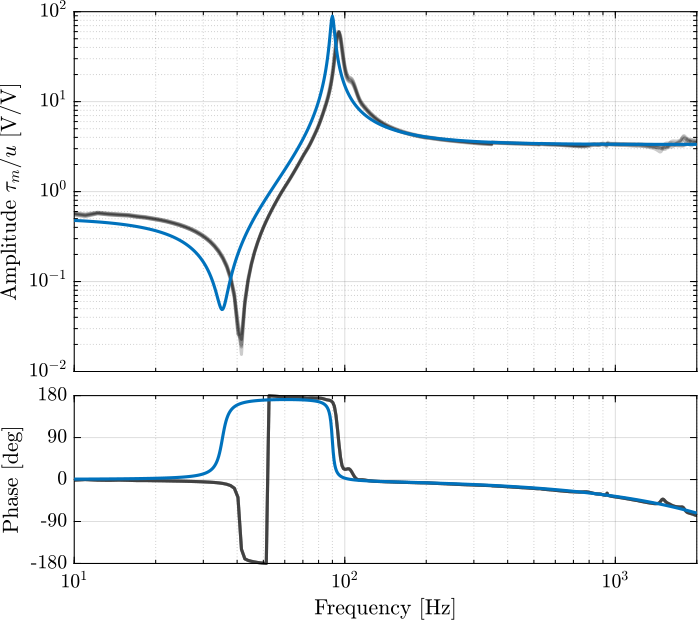
Figure 57: Comparison of the experimental data and Simscape model (\(u\) to \(\tau_m\))
The flexible model is a bit “soft” compared with the experimental results.
4.4 Optimize 2-DoF model to fit the experimental Data
%% Optimized parameters n_hexapod.actuator = initializeAPA('type', '2dof', ... 'Ga', -30.0, ... 'Gs', 0.098, ... 'k', ones(6,1)*0.38e6, ... 'ke', ones(6,1)*1.75e6, ... 'ka', ones(6,1)*3e7, ... 'c', ones(6,1)*1.3e2, ... 'ce', ones(6,1)*1e1, ... 'ca', ones(6,1)*1e1 ... );
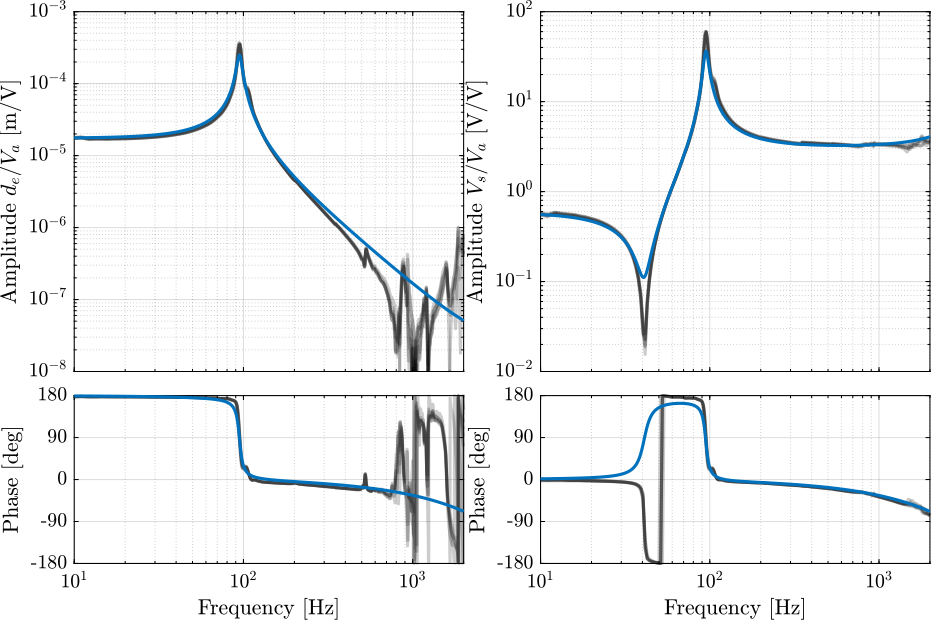
Figure 58: Comparison of the measured FRF and the optimized model
5 Dynamical measurements - Struts
The same bench used in Section 3 is here used with the strut instead of only the APA.
The bench is shown in Figure 59. Measurements are performed either when no encoder is fixed to the strut (Figure 60) or when one encoder is fixed to the strut (Figure 59).
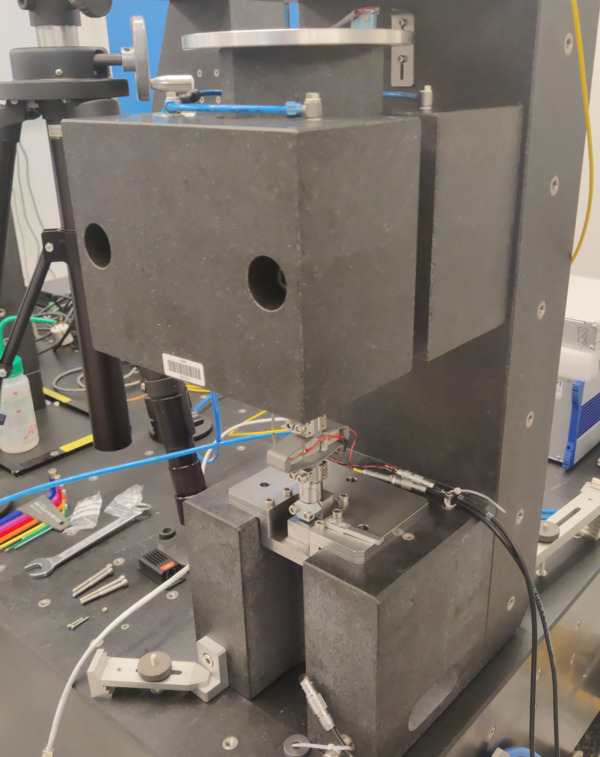
Figure 59: Test Bench with Strut - Overview
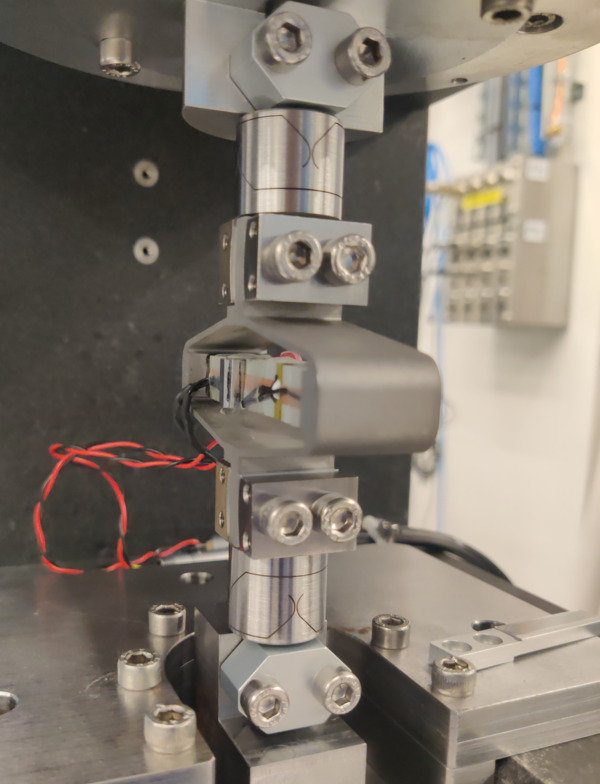
Figure 60: Test Bench with Strut - Zoom on the strut
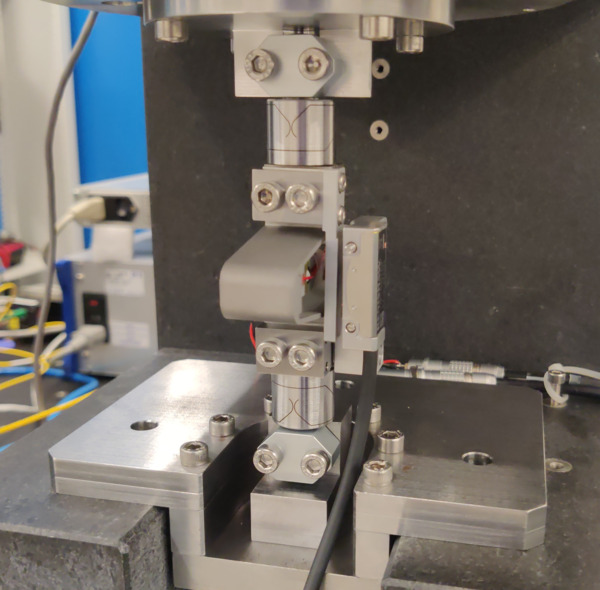
Figure 61: Test Bench with Strut - Zoom on the strut with the encoder
5.1 Measurement on Strut 1
5.1.1 Without Encoder
5.1.1.1 FRF Identification - Setup
The identification is performed in three steps:
- White noise excitation with small amplitude. This is used to determine the main resonance of the system.
- Sweep sine excitation with the amplitude lowered around the resonance. The sweep sine is from 10Hz to 400Hz.
- High frequency noise. The noise is band-passed between 300Hz and 2kHz.
Then, the result of the second identification is used between 10Hz and 350Hz and the result of the third identification if used between 350Hz and 2kHz.
leg_sweep = load(sprintf('frf_data_leg_%i_sweep.mat', 1), 't', 'Va', 'Vs', 'de', 'da'); leg_noise_hf = load(sprintf('frf_data_leg_%i_noise_hf.mat', 1), 't', 'Va', 'Vs', 'de', 'da');
The time is the same for all measurements.
%% Time vector t = leg_sweep.t - leg_sweep.t(1) ; % Time vector [s] %% Sampling Ts = (t(end) - t(1))/(length(t)-1); % Sampling Time [s] Fs = 1/Ts; % Sampling Frequency [Hz]
Then we defined a “Hanning” windows that will be used for the spectral analysis:
win = hanning(ceil(0.5*Fs)); % Hannning Windows
We get the frequency vector that will be the same for all the frequency domain analysis.
% Only used to have the frequency vector "f" [~, f] = tfestimate(leg_sweep.Va, leg_sweep.de, win, [], [], 1/Ts);
5.1.1.2 FRF Identification - Displacement
In this section, the dynamics from the excitation voltage \(V_a\) to the interferometer \(d_a\) is identified.
We compute the coherence for 2nd and 3rd identification:
[coh_sweep, ~] = mscohere(leg_sweep.Va, leg_sweep.da, win, [], [], 1/Ts); [coh_noise_hf, ~] = mscohere(leg_noise_hf.Va, leg_noise_hf.da, win, [], [], 1/Ts);
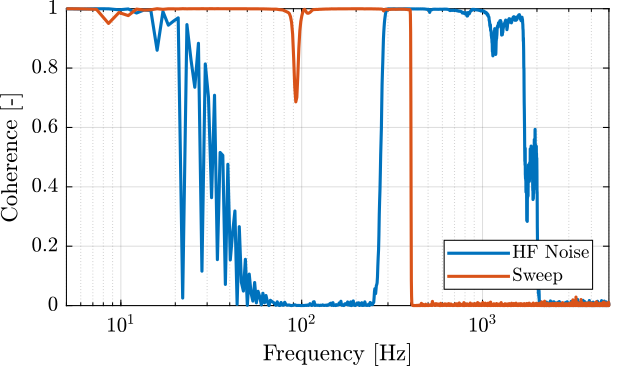
Figure 62: Obtained coherence for the plant from \(V_a\) to \(d_a\)
The transfer function from \(V_a\) to the interferometer measured displacement \(d_a\) is estimated and shown in Figure 63.
[dvf_sweep, ~] = tfestimate(leg_sweep.Va, leg_sweep.da, win, [], [], 1/Ts); [dvf_noise_hf, ~] = tfestimate(leg_noise_hf.Va, leg_noise_hf.da, win, [], [], 1/Ts);
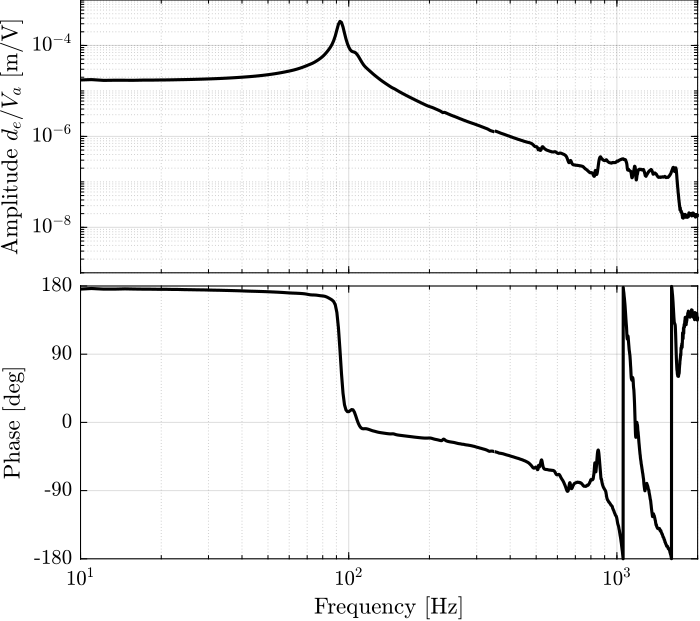
Figure 63: Estimated FRF for the DVF plant (transfer function from \(V_a\) to the interferometer \(d_a\))
5.1.1.3 FRF Identification - IFF
In this section, the dynamics from \(V_a\) to \(V_s\) is identified.
First the coherence is computed and shown in Figure 64. The coherence is very nice from 10Hz to 2kHz. It is only dropping near a zeros at 40Hz, and near the resonance at 95Hz (the excitation amplitude being lowered).
[coh_sweep, ~] = mscohere(leg_sweep.Va, leg_sweep.Vs, win, [], [], 1/Ts); [coh_noise_hf, ~] = mscohere(leg_noise_hf.Va, leg_noise_hf.Vs, win, [], [], 1/Ts);
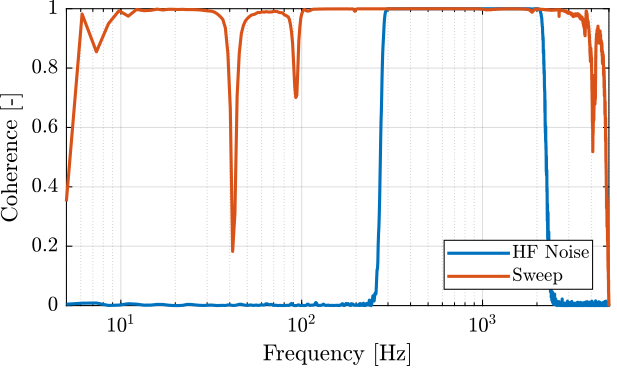
Figure 64: Obtained coherence for the IFF plant
Then the FRF are estimated and shown in Figure 65
[iff_sweep, ~] = tfestimate(leg_sweep.Va, leg_sweep.Vs, win, [], [], 1/Ts); [iff_noise_hf, ~] = tfestimate(leg_noise_hf.Va, leg_noise_hf.Vs, win, [], [], 1/Ts);
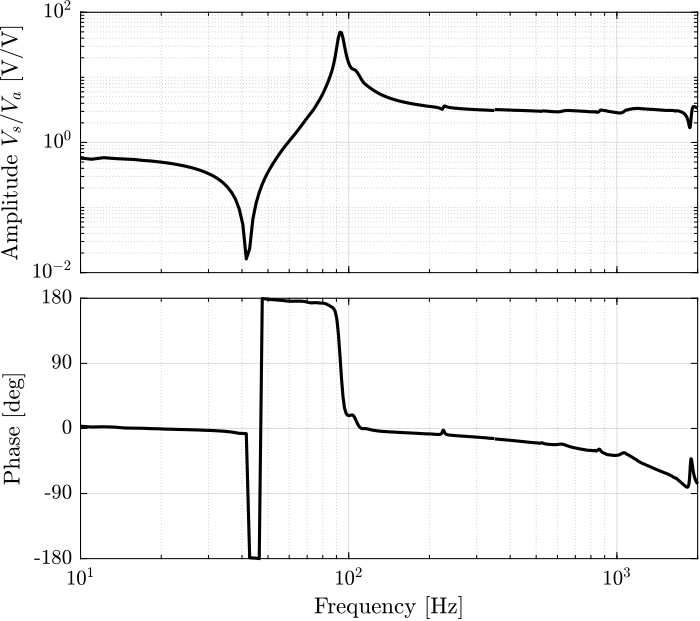
Figure 65: Identified IFF Plant for the Strut 1
5.1.2 With Encoder
5.1.2.1 Measurement Data
leg_enc_sweep = load(sprintf('frf_data_leg_coder_badly_align_%i_noise.mat', 1), 't', 'Va', 'Vs', 'de', 'da'); leg_enc_noise_hf = load(sprintf('frf_data_leg_coder_badly_align_%i_noise_hf.mat', 1), 't', 'Va', 'Vs', 'de', 'da');
5.1.2.2 FRF Identification - DVF
In this section, the dynamics from \(V_a\) to \(d_e\) is identified.
We compute the coherence for 2nd and 3rd identification:
[coh_enc_sweep, ~] = mscohere(leg_enc_sweep.Va, leg_enc_sweep.de, win, [], [], 1/Ts); [coh_enc_noise_hf, ~] = mscohere(leg_enc_noise_hf.Va, leg_enc_noise_hf.de, win, [], [], 1/Ts);
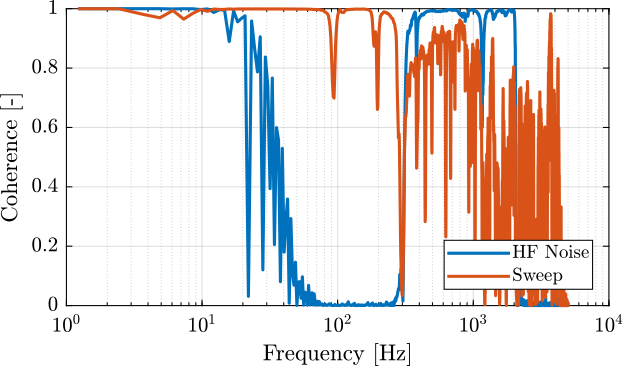
Figure 66: Obtained coherence for the plant from \(V_a\) to \(d_e\)
[dvf_enc_sweep, ~] = tfestimate(leg_enc_sweep.Va, leg_enc_sweep.de, win, [], [], 1/Ts); [dvf_enc_noise_hf, ~] = tfestimate(leg_enc_noise_hf.Va, leg_enc_noise_hf.de, win, [], [], 1/Ts);
[dvf_int_sweep, ~] = tfestimate(leg_enc_sweep.Va, leg_enc_sweep.da, win, [], [], 1/Ts); [dvf_int_noise_hf, ~] = tfestimate(leg_enc_noise_hf.Va, leg_enc_noise_hf.da, win, [], [], 1/Ts);
The obtained transfer functions are shown in Figure 67.
They are all superimposed except for the APA7.
Why is the APA7 off? We could think that the APA7 is stiffer, but also the mass line is off.
It seems that there is a “gain” problem. The encoder seems fine (it measured the same as the Interferometer). Maybe it could be due to the amplifier?
Why is there a double resonance at around 94Hz?
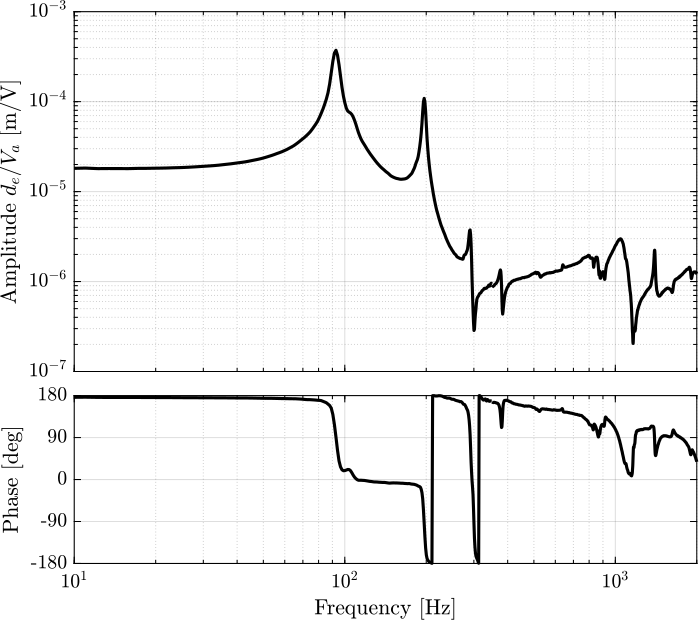
Figure 67: Estimated FRF for the DVF plant (transfer function from \(V_a\) to the encoder \(d_e\))
5.1.2.3 Comparison of the Encoder and Interferometer
The interferometer could here represent the case where the encoders are fixed to the plates and not the APA.
The dynamics from \(V_a\) to \(d_e\) and from \(V_a\) to \(d_a\) are compared in Figure 68.
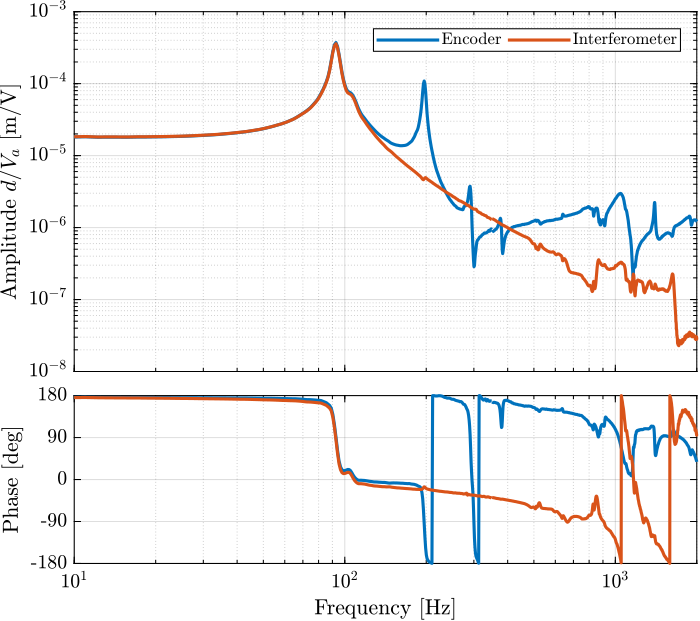
Figure 68: Comparison of the transfer functions from excitation voltage \(V_a\) to either the encoder \(d_e\) or the interferometer \(d_a\)
It will clearly be difficult to do something (except some low frequency positioning) with the encoders fixed to the APA.
5.1.2.4 APA Resonances Frequency
As shown in Figure 69, we can clearly see three spurious resonances at 197Hz, 290Hz and 376Hz.
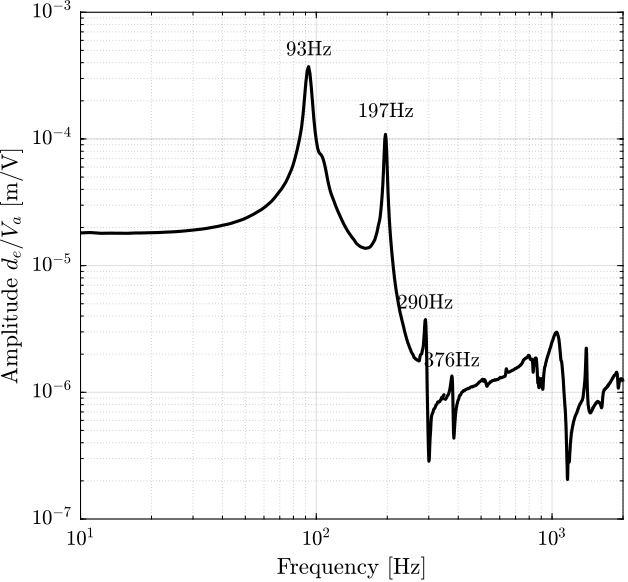
Figure 69: Magnitude of the transfer function from excitation voltage \(V_a\) to encoder measurement \(d_e\). The frequency of the resonances are noted.
These resonances correspond to parasitic resonances of the APA itself. They are very close to what was estimated using the FEM (Figure 70):
- Mode in X-bending at 189Hz
- Mode in Y-bending at 285Hz
- Mode in Z-torsion at 400Hz
Figure 70: Spurious resonances. a) X-bending mode at 189Hz. b) Y-bending mode at 285Hz. c) Z-torsion mode at 400Hz
The resonances are indeed due to limited stiffness of the APA.
5.1.2.5 Estimated Flexible Joint axial stiffness
load(sprintf('frf_data_leg_coder_%i_add_mass_closed_circuit.mat', 1), 't', 'Va', 'Vs', 'de', 'da'); de = de - de(1); da = da - da(1);
figure; hold on; plot(t, de, 'DisplayName', 'Encoder') plot(t, da, 'DisplayName', 'Interferometer') hold off; xlabel('Time [s]'); ylabel('Displacement [m]'); legend('location', 'northeast');
de_steps = [mean(de(t > 13 & t < 14)); mean(de(t > 19 & t < 20)); mean(de(t > 24 & t < 25)); mean(de(t > 28.5 & t < 29.5)); mean(de(t > 49 & t < 50))] - mean(de(t > 13 & t < 14)); da_steps = [mean(da(t > 13 & t < 14)); mean(da(t > 19 & t < 20)); mean(da(t > 24 & t < 25)); mean(da(t > 28.5 & t < 29.5)); mean(da(t > 49 & t < 50))] - mean(da(t > 13 & t < 14));
added_mass = [0; 1; 2; 3; 4];
lin_fit = (added_mass\abs(de_steps-da_steps) - abs(de_steps(1)-da_steps(1)));
figure; hold on; plot(added_mass, abs(de_steps-da_steps) - abs(de_steps(1)-da_steps(1)), 'ok') plot(added_mass, added_mass*lin_fit, '-r') hold off;
What is strange is that the encoder is measuring a larger displacement than the interferometer. That should be the opposite. Maybe is is caused by the fact that the APA is experiencing some bending and therefore a larger motion is measured on the encoder.
5.1.2.6 FRF Identification - IFF
In this section, the dynamics from \(V_a\) to \(V_s\) is identified.
First the coherence is computed and shown in Figure 64. The coherence is very nice from 10Hz to 2kHz. It is only dropping near a zeros at 40Hz, and near the resonance at 95Hz (the excitation amplitude being lowered).
[coh_enc_sweep, ~] = mscohere(leg_enc_sweep.Va, leg_enc_sweep.Vs, win, [], [], 1/Ts); [coh_enc_noise_hf, ~] = mscohere(leg_enc_noise_hf.Va, leg_enc_noise_hf.Vs, win, [], [], 1/Ts);
Figure 71: Obtained coherence for the IFF plant
Then the FRF are estimated and shown in Figure 72
[iff_enc_sweep, ~] = tfestimate(leg_enc_sweep.Va, leg_enc_sweep.Vs, win, [], [], 1/Ts); [iff_enc_noise_hf, ~] = tfestimate(leg_enc_noise_hf.Va, leg_enc_noise_hf.Vs, win, [], [], 1/Ts);
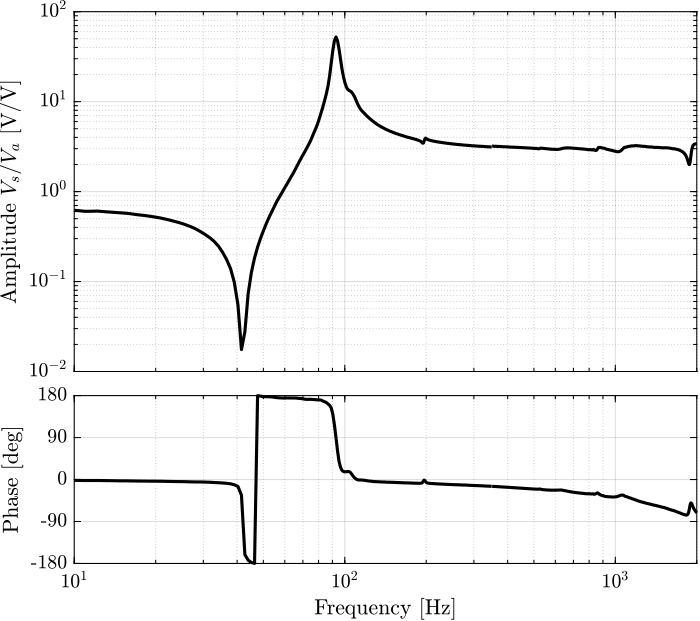
Figure 72: Identified IFF Plant
Let’s now compare the IFF plants whether the encoders are fixed to the APA or not (Figure 73).
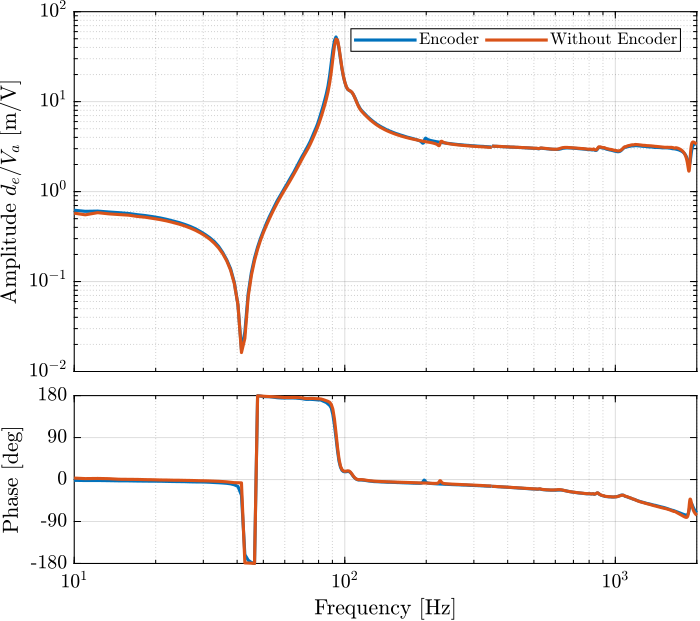
Figure 73: Effect of the encoder on the IFF plant
We can see that the IFF does not change whether of not the encoder are fixed to the struts.
5.2 Comparison of all the Struts
5.2.1 FRF Identification - Setup
The identification is performed in two steps:
- White noise excitation with small amplitude. This is used to estimate the low frequency dynamics.
- High frequency noise. The noise is band-passed between 300Hz and 2kHz.
Then, the result of the first identification is used between 10Hz and 350Hz and the result of the second identification if used between 350Hz and 2kHz.
Here are the LEG numbers that have been measured.
leg_nums = [1 2 3 4 5];
The data are loaded for both the first and second identification:
%% Second identification leg_noise = {}; for i = 1:length(leg_nums) leg_noise(i) = {load(sprintf('frf_data_leg_coder_%i_noise.mat', leg_nums(i)), 't', 'Va', 'Vs', 'de', 'da')}; end %% Third identification leg_noise_hf = {}; for i = 1:length(leg_nums) leg_noise_hf(i) = {load(sprintf('frf_data_leg_coder_%i_noise_hf.mat', leg_nums(i)), 't', 'Va', 'Vs', 'de', 'da')}; end
The time is the same for all measurements.
%% Time vector t = leg_noise{1}.t - leg_noise{1}.t(1) ; % Time vector [s] %% Sampling Ts = (t(end) - t(1))/(length(t)-1); % Sampling Time [s] Fs = 1/Ts; % Sampling Frequency [Hz]
Then we defined a “Hanning” windows that will be used for the spectral analysis:
win = hanning(ceil(0.5*Fs)); % Hannning Windows
We get the frequency vector that will be the same for all the frequency domain analysis.
% Only used to have the frequency vector "f" [~, f] = tfestimate(leg_noise{1}.Va, leg_noise{1}.de, win, [], [], 1/Ts); i_lf = f <= 350; i_hf = f > 350;
5.2.2 FRF Identification - Encoder
In this section, the dynamics from \(V_a\) to \(d_e\) is identified.
We compute the coherence for 2nd and 3rd identification:
%% Coherence computation coh_enc = zeros(length(f), length(leg_nums)); for i = 1:length(leg_nums) [coh_lf, ~] = mscohere(leg_noise{i}.Va, leg_noise{i}.de, win, [], [], 1/Ts); [coh_hf, ~] = mscohere(leg_noise_hf{i}.Va, leg_noise_hf{i}.de, win, [], [], 1/Ts); coh_enc(:, i) = [coh_lf(i_lf); coh_hf(i_hf)]; end
The coherence is shown in Figure 74. It is clear that the Noise sine gives good coherence up to 400Hz and that the high frequency noise excitation signal helps increasing a little bit the coherence at high frequency.
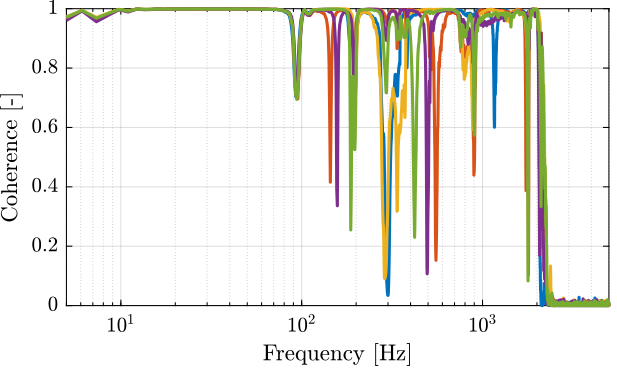
Figure 74: Obtained coherence for the plant from \(V_a\) to \(d_e\)
Then, the transfer function from the DAC output voltage \(V_a\) to the measured displacement by the encoders is computed:
%% Transfer function estimation enc_frf = zeros(length(f), length(leg_nums)); for i = 1:length(leg_nums) [frf_lf, ~] = tfestimate(leg_noise{i}.Va, leg_noise{i}.de, win, [], [], 1/Ts); [frf_hf, ~] = tfestimate(leg_noise_hf{i}.Va, leg_noise_hf{i}.de, win, [], [], 1/Ts); enc_frf(:, i) = [frf_lf(i_lf); frf_hf(i_hf)]; end
The obtained transfer functions are shown in Figure 75.
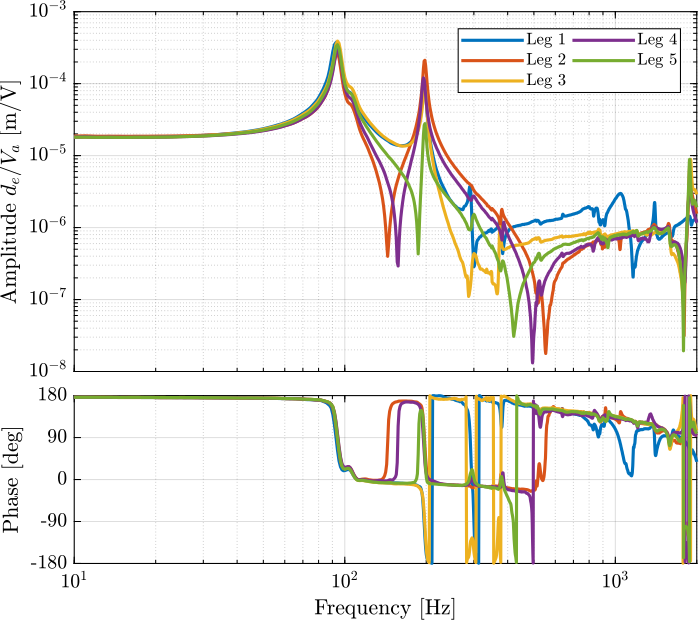
Figure 75: Estimated FRF for the DVF plant (transfer function from \(V_a\) to the encoder \(d_e\))
Depending on how the APA are mounted with the flexible joints, the dynamics can change a lot as shown in Figure 75. In the future, a “pin” will be used to better align the APA with the flexible joints. We can expect the amplitude of the spurious resonances to decrease. We can also observe the presence or absence of complex conjugate zeros between the first two modes. This might also be dependent on the alignment.
5.2.3 FRF Identification - Interferometer
In this section, the dynamics from \(V_a\) to \(d_a\) is identified.
We compute the coherence.
%% Coherence computation coh_int = zeros(length(f), length(leg_nums)); for i = 1:length(leg_nums) [coh_lf, ~] = mscohere(leg_noise{i}.Va, leg_noise{i}.da, win, [], [], 1/Ts); [coh_hf, ~] = mscohere(leg_noise_hf{i}.Va, leg_noise_hf{i}.da, win, [], [], 1/Ts); coh_int(:, i) = [coh_lf(i_lf); coh_hf(i_hf)]; end
The coherence is shown in Figure 76. It is clear that the Noise sine gives good coherence up to 400Hz and that the high frequency noise excitation signal helps increasing a little bit the coherence at high frequency.
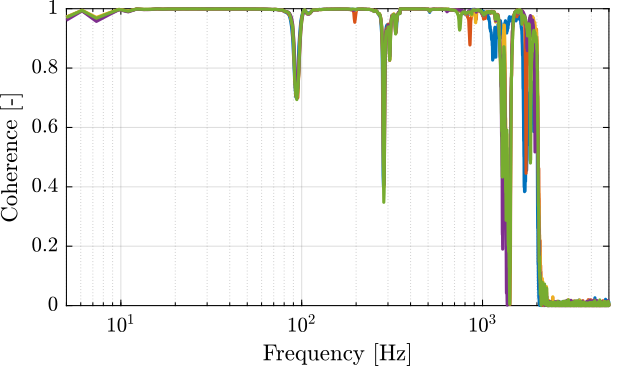
Figure 76: Obtained coherence for the plant from \(V_a\) to \(d_e\)
Then, the transfer function from the DAC output voltage \(V_a\) to the measured displacement by the Attocube is computed:
%% Transfer function estimation int_frf = zeros(length(f), length(leg_nums)); for i = 1:length(leg_nums) [frf_lf, ~] = tfestimate(leg_noise{i}.Va, leg_noise{i}.da, win, [], [], 1/Ts); [frf_hf, ~] = tfestimate(leg_noise_hf{i}.Va, leg_noise_hf{i}.da, win, [], [], 1/Ts); int_frf(:, i) = [frf_lf(i_lf); frf_hf(i_hf)]; end
The obtained transfer functions are shown in Figure 77.
They are all superimposed except for the LEG7.
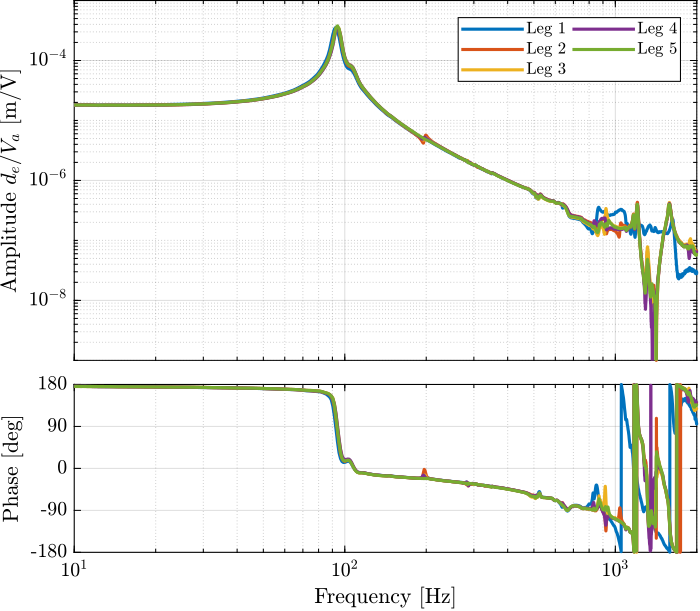
Figure 77: Estimated FRF for the DVF plant (transfer function from \(V_a\) to the encoder \(d_e\))
5.2.4 FRF Identification - Force Sensor
In this section, the dynamics from \(V_a\) to \(V_s\) is identified.
First the coherence is computed and shown in Figure 78. The coherence is very nice from 10Hz to 2kHz. It is only dropping near a zeros at 40Hz, and near the resonance at 95Hz (the excitation amplitude being lowered).
%% Coherence coh_iff = zeros(length(f), length(leg_nums)); for i = 1:length(leg_nums) [coh_lf, ~] = mscohere(leg_noise{i}.Va, leg_noise{i}.Vs, win, [], [], 1/Ts); [coh_hf, ~] = mscohere(leg_noise_hf{i}.Va, leg_noise_hf{i}.Vs, win, [], [], 1/Ts); coh_iff(:, i) = [coh_lf(i_lf); coh_hf(i_hf)]; end
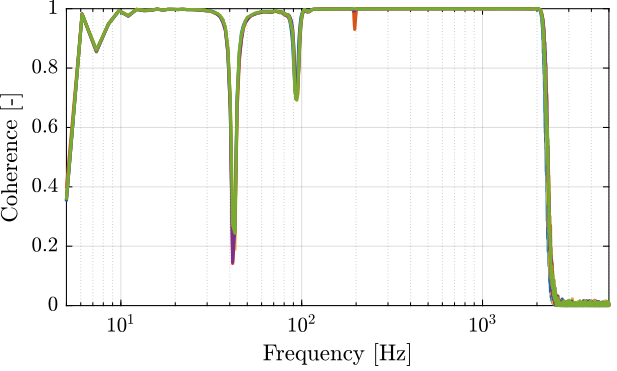
Figure 78: Obtained coherence for the IFF plant
Then the FRF are estimated and shown in Figure 79
%% FRF estimation of the transfer function from Va to Vs iff_frf = zeros(length(f), length(leg_nums)); for i = 1:length(leg_nums) [frf_lf, ~] = tfestimate(leg_noise{i}.Va, leg_noise{i}.Vs, win, [], [], 1/Ts); [frf_hf, ~] = tfestimate(leg_noise_hf{i}.Va, leg_noise_hf{i}.Vs, win, [], [], 1/Ts); iff_frf(:, i) = [frf_lf(i_lf); frf_hf(i_hf)]; end
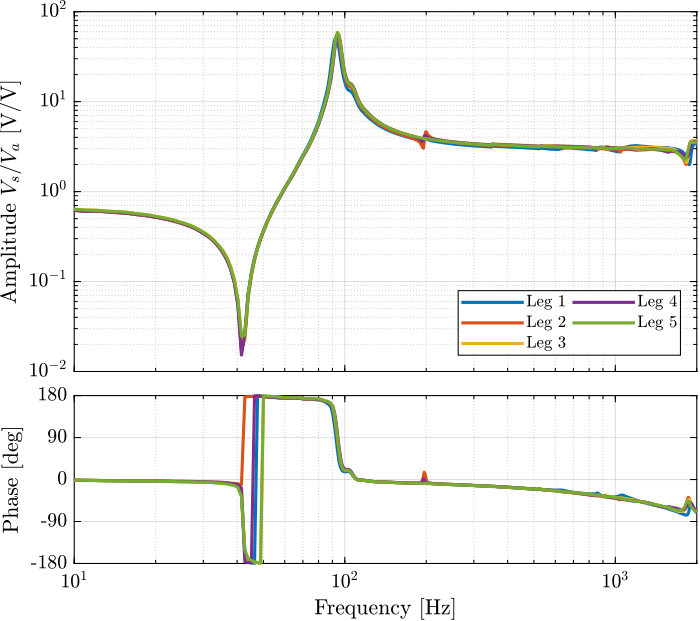
Figure 79: Identified IFF Plant
5.2.5 Save measured FRF
save('mat/meas_struts_frf.mat', 'f', 'Ts', 'enc_frf', 'int_frf', 'iff_frf', 'leg_nums');
6 Test Bench Struts - Simscape Model
6.2 Comparison with the 2-DoF Model
6.2.1 First Identification
The object containing all the data is created.
%% Initialize structure containing data for the Simscape model n_hexapod = struct(); n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '2dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '2dof'); n_hexapod.actuator = initializeAPA('type', '2dof');
%% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Va'], 1, 'openinput'); io_i = io_i + 1; % Actuator Voltage io(io_i) = linio([mdl, '/Vs'], 1, 'openoutput'); io_i = io_i + 1; % Sensor Voltage io(io_i) = linio([mdl, '/dL'], 1, 'openoutput'); io_i = io_i + 1; % Relative Motion Outputs io(io_i) = linio([mdl, '/z'], 1, 'openoutput'); io_i = io_i + 1; % Vertical Motion
%% Run the linearization Gs = linearize(mdl, io, 0.0, options); Gs.InputName = {'Va'}; Gs.OutputName = {'Vs', 'dL', 'z'};
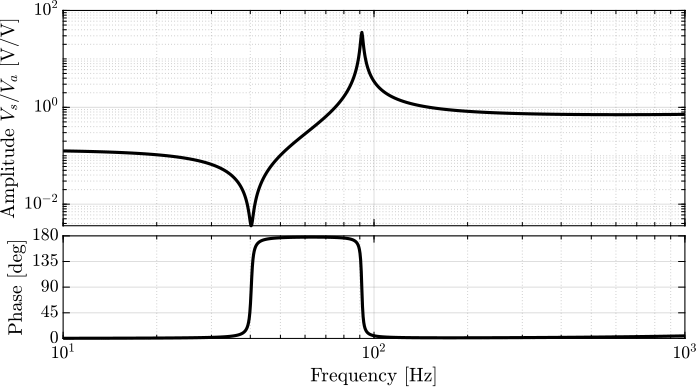
Figure 80: Identified transfer function from \(V_a\) to \(V_s\)
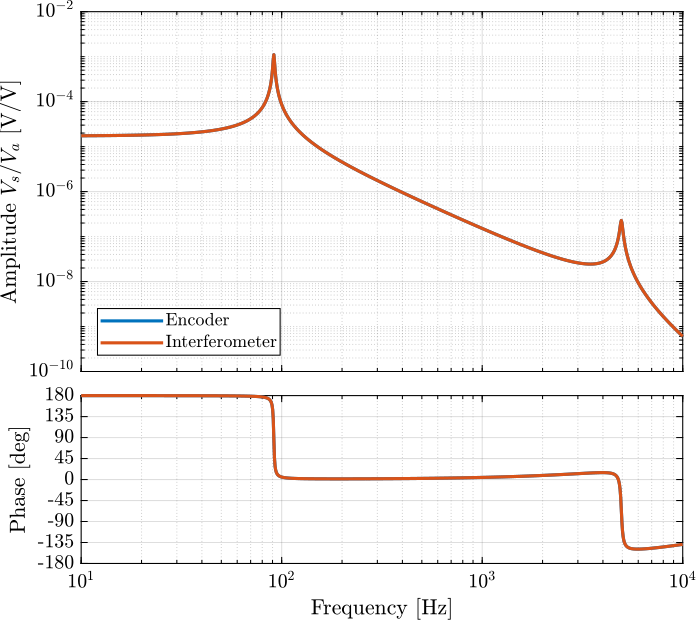
Figure 81: Identified transfer function from \(V_a\) to \(d_L\)
6.2.2 Effect of flexible joints
Perfect
%% Perfect Joints n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '2dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '3dof'); Gp = linearize(mdl, io, 0.0, options); Gp.InputName = {'Va'}; Gp.OutputName = {'Vs', 'dL', 'z'};
Top Flexible
%% Top joint with Axial stiffness n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '2dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '4dof'); Gt = linearize(mdl, io, 0.0, options); Gt.InputName = {'Va'}; Gt.OutputName = {'Vs', 'dL', 'z'};
Bottom Flexible
%% Bottom joint with Axial stiffness n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '4dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '3dof'); Gb = linearize(mdl, io, 0.0, options); Gb.InputName = {'Va'}; Gb.OutputName = {'Vs', 'dL', 'z'};
Both Flexible
%% Both joints with Axial stiffness n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '4dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '4dof'); Gf = linearize(mdl, io, 0.0, options); Gf.InputName = {'Va'}; Gf.OutputName = {'Vs', 'dL', 'z'};
Comparison in Figures 82, 83 and 84.
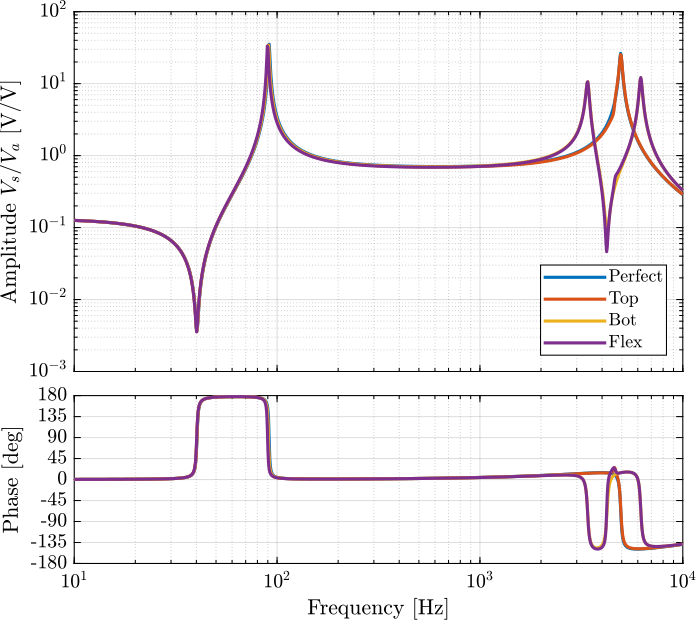
Figure 82: Effect of the joint’s flexibility on the transfer function from \(V_a\) to \(V_s\)
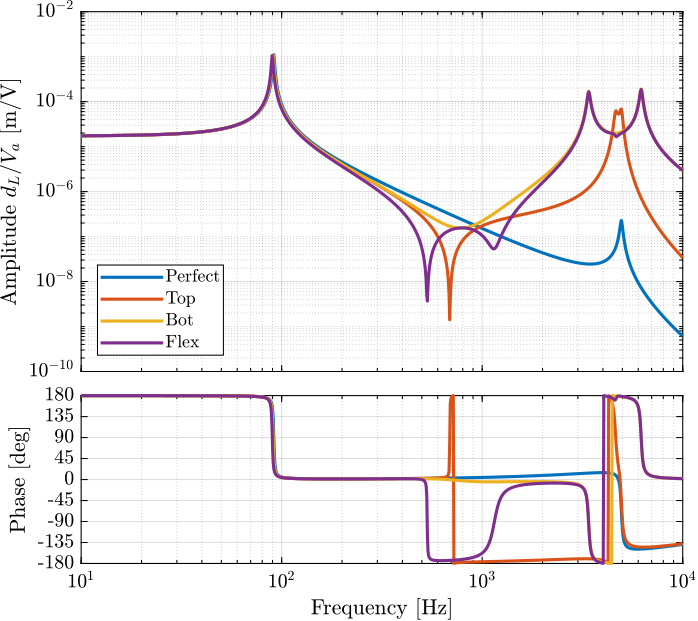
Figure 83: Effect of the joint’s flexibility on the transfer function from \(V_a\) to \(d_L\) (encoder)
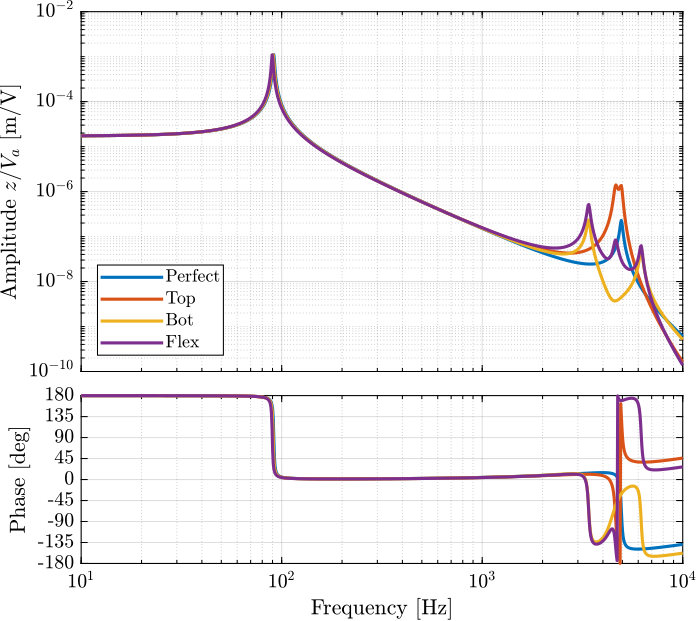
Figure 84: Effect of the joint’s flexibility on the transfer function from \(V_a\) to \(z\) (interferometer)
Imperfection of the flexible joints has the largest impact on the transfer function from \(V_a\) to \(d_L\). However, it has relatively small impact on the transfer functions from \(V_a\) to \(V_s\) and to \(z\).
6.2.3 Comparison with the experimental Data
%% Load measured FRF load('meas_struts_frf.mat', 'f', 'Ts', 'enc_frf', 'int_frf', 'iff_frf', 'leg_nums');
%% Initialize Simscape data n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '4dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '4dof'); n_hexapod.actuator = initializeAPA('type', '2dof');
%% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Va'], 1, 'openinput'); io_i = io_i + 1; % Actuator Voltage io(io_i) = linio([mdl, '/Vs'], 1, 'openoutput'); io_i = io_i + 1; % Sensor Voltage io(io_i) = linio([mdl, '/z'], 1, 'openoutput'); io_i = io_i + 1; % Interferometer io(io_i) = linio([mdl, '/dL'], 1, 'openoutput'); io_i = io_i + 1; % Encoder %% Identification Gs = exp(-s*Ts)*linearize(mdl, io, 0.0, options); Gs.InputName = {'Va'}; Gs.OutputName = {'Vs', 'z', 'dL'};
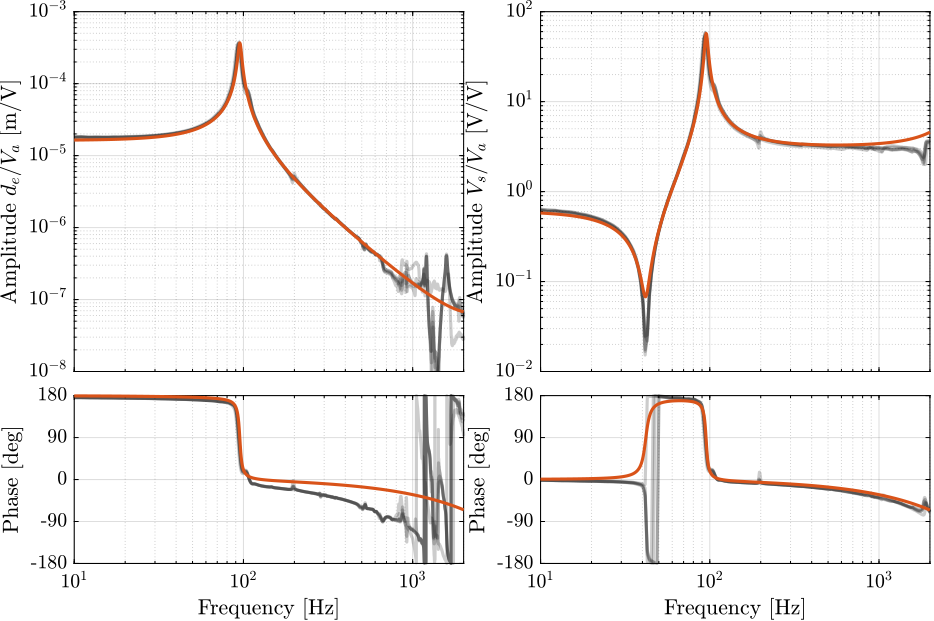
Figure 85: Comparison of the measured FRF and the optimized model
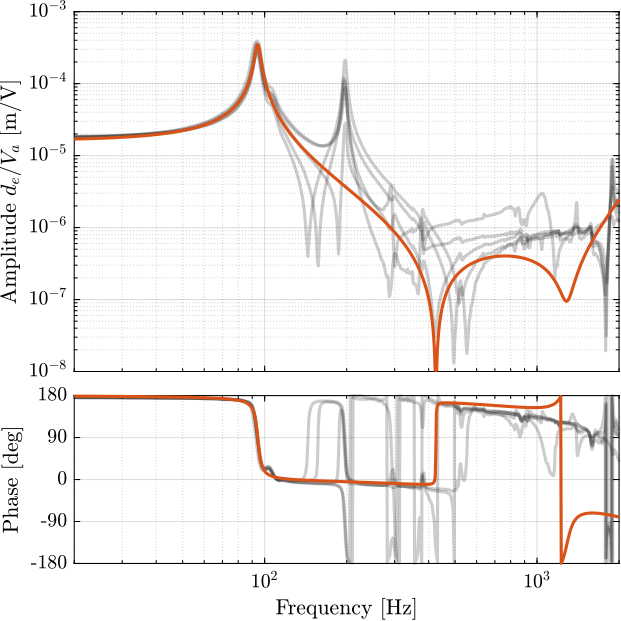
Figure 86: Comparison of the measured FRF and the optimized model
The 2-DoF model is quite effective in modelling the transfer function from actuator to force sensor and from actuator to interferometer (Figure 85). But it is not effective in modeling the transfer function from actuator to encoder (Figure 86). This is due to the fact that resonances greatly affecting the encoder reading are not modelled. In the next section, flexible model of the APA will be used to model such resonances.
6.3 Effect of a misalignment of the APA and flexible joints on the transfer function from actuator to encoder
As shown in Figure 75, the dynamics from actuator to encoder for all the struts is very different.
This could be explained by a large variability in the alignment of the flexible joints and the APA (at the time, the alignment pins were not used).
Depending on the alignment, the spurious resonances of the struts (Figure 17) can be excited differently.
Figure 87: Spurious resonances. a) X-bending mode at 189Hz. b) Y-bending mode at 285Hz. c) Z-torsion mode at 400Hz
For instance, consider Figure 88 where there is a misalignment in the \(y\) direction. In such case, the mode at 200Hz is foreseen to be more excited as the misalignment \(d_y\) increases and therefore the dynamics from the actuator to the encoder should also change around 200Hz.
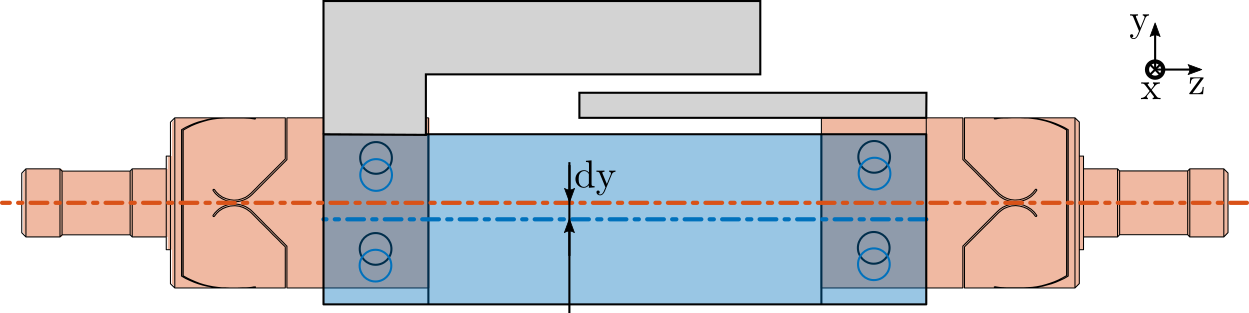
Figure 88: Mis-alignement between the joints and the APA
If the misalignment is in the \(x\) direction, the mode at 300Hz should be more affected whereas a misalignment in the \(z\) direction should not affect these resonances.
Such statement is studied in this section.
6.3.1 Load Data
First, the measured FRF are loaded.
load('meas_struts_frf.mat', 'f', 'Ts', 'enc_frf', 'int_frf', 'iff_frf', 'leg_nums');
6.3.2 Perfectly aligned APA
Let’s first consider that the strut is perfectly mounted such that the two flexible joints and the APA are aligned.
%% Initialize Simscape data n_hexapod.flex_bot = initializeBotFlexibleJoint('type', '4dof'); n_hexapod.flex_top = initializeTopFlexibleJoint('type', '4dof'); n_hexapod.actuator = initializeAPA('type', 'flexible');
And define the inputs and outputs of the models:
- Input: voltage generated by the DAC
- Output: measured displacement by the encoder
%% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Va'], 1, 'openinput'); io_i = io_i + 1; % Actuator Voltage io(io_i) = linio([mdl, '/dL'], 1, 'openoutput'); io_i = io_i + 1; % Encoder
The transfer function is identified and shown in Figure 89.
%% Identification Gs = exp(-s*Ts)*linearize(mdl, io, 0.0, options); Gs.InputName = {'Va'}; Gs.OutputName = {'dL'};
From Figure 89, it is clear that:
- The model with perfect alignment is not matching the measured FRF
- The measured FRF have different shapes
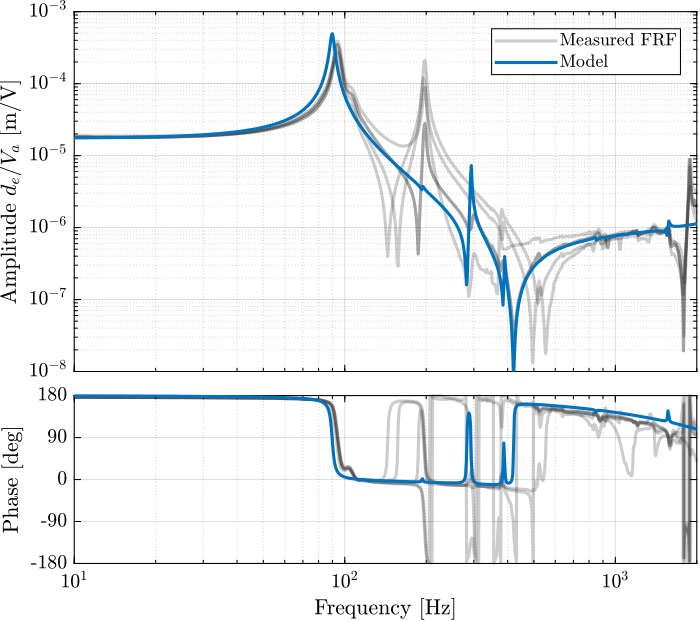
Figure 89: Comparison of the model with a perfectly aligned APA and flexible joints with the measured FRF from actuator to encoder
6.3.3 Effect of a misalignment in y
Let’s compute the transfer function from output DAC voltage to the measured displacement by the encoder for several misalignment in the \(y\) direction:
%% Considered misalignments dy_aligns = [-0.5, -0.1, 0, 0.1, 0.5]*1e-3; % [m]
%% Transfer functions from u to dL for all the misalignment in y direction Gs_align = {zeros(length(dy_aligns), 1)}; for i = 1:length(dy_aligns) n_hexapod.actuator = initializeAPA('type', 'flexible', 'd_align', [0; dy_aligns(i); 0]); G = exp(-s*Ts)*linearize(mdl, io, 0.0, options); G.InputName = {'Va'}; G.OutputName = {'dL'}; Gs_align(i) = {G}; end
The obtained dynamics are shown in Figure 90.
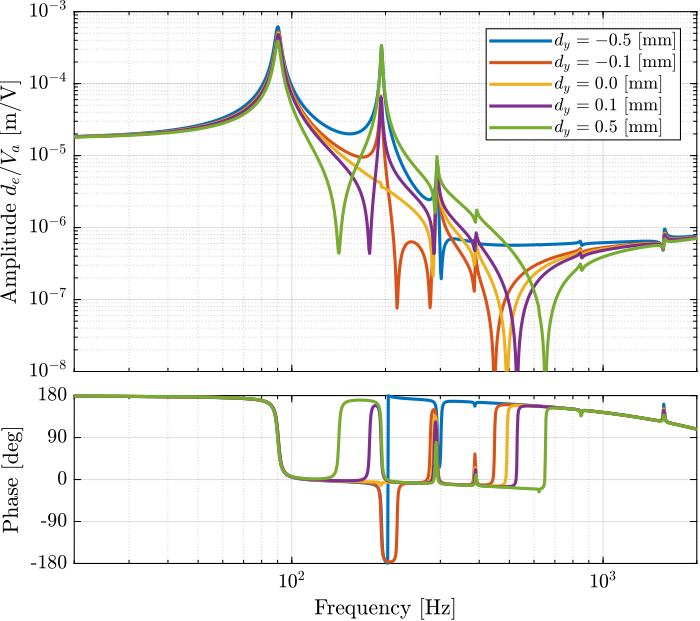
Figure 90: Effect of a misalignement in the \(y\) direction
The alignment of the APA with the flexible joints as a huge influence on the dynamics from actuator voltage to measured displacement by the encoder. The misalignment in the \(y\) direction mostly influences:
- the presence of the flexible mode at 200Hz
- the location of the complex conjugate zero between the first two resonances:
- if \(d_y < 0\): there is no zero between the two resonances and possibly not even between the second and third ones
- if \(d_y > 0\): there is a complex conjugate zero between the first two resonances
- the location of the high frequency complex conjugate zeros at 500Hz (secondary effect, as the axial stiffness of the joint also has large effect on the position of this zero)
6.3.4 Effect of a misalignment in x
Let’s compute the transfer function from output DAC voltage to the measured displacement by the encoder for several misalignment in the \(x\) direction:
%% Considered misalignments dx_aligns = [-0.1, -0.05, 0, 0.05, 0.1]*1e-3; % [m]
%% Transfer functions from u to dL for all the misalignment in x direction Gs_align = {zeros(length(dx_aligns), 1)}; for i = 1:length(dx_aligns) n_hexapod.actuator = initializeAPA('type', 'flexible', 'd_align', [dx_aligns(i); 0; 0]); G = exp(-s*Ts)*linearize(mdl, io, 0.0, options); G.InputName = {'Va'}; G.OutputName = {'dL'}; Gs_align(i) = {G}; end
The obtained dynamics are shown in Figure 91.
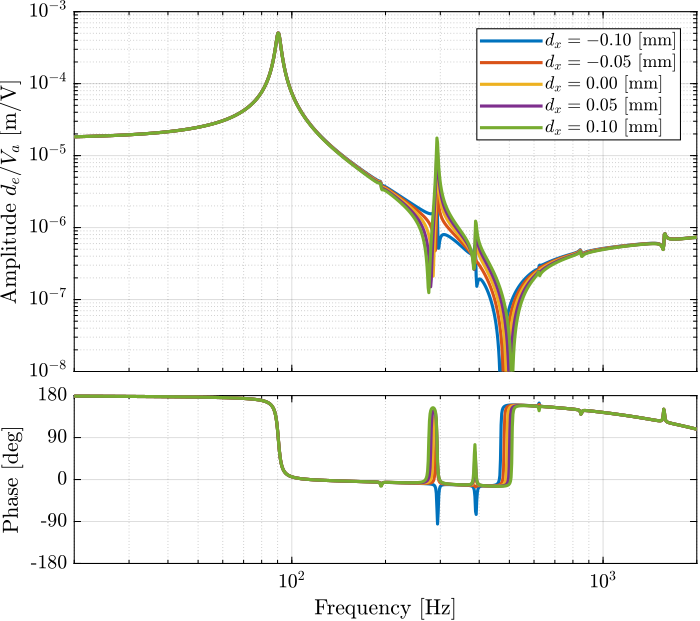
Figure 91: Effect of a misalignement in the \(x\) direction
The misalignment in the \(x\) direction mostly influences the presence of the flexible mode at 300Hz.
6.3.5 Find the misalignment of each strut
From the previous analysis on the effect of a \(x\) and \(y\) misalignment, it is possible to estimate the \(x,y\) misalignment of the measured struts.
The misalignment that gives the best match for the FRF are defined below.
%% Tuned misalignment [m] d_aligns = [[-0.05, -0.3, 0]; [ 0, 0.5, 0]; [-0.1, -0.3, 0]; [ 0, 0.3, 0]; [-0.05, 0.05, 0]]'*1e-3;
For each misalignment, the dynamics from the DAC voltage to the encoder measurement is identified.
%% Idenfity the transfer function from actuator to encoder for all cases Gs_align = {zeros(size(d_aligns,2), 1)}; for i = 1:size(d_aligns,2) n_hexapod.actuator = initializeAPA('type', 'flexible', 'd_align', d_aligns(:,i)); G = exp(-s*Ts)*linearize(mdl, io, 0.0, options); G.InputName = {'Va'}; G.OutputName = {'dL'}; Gs_align(i) = {G}; end
The results are shown in Figure 92.
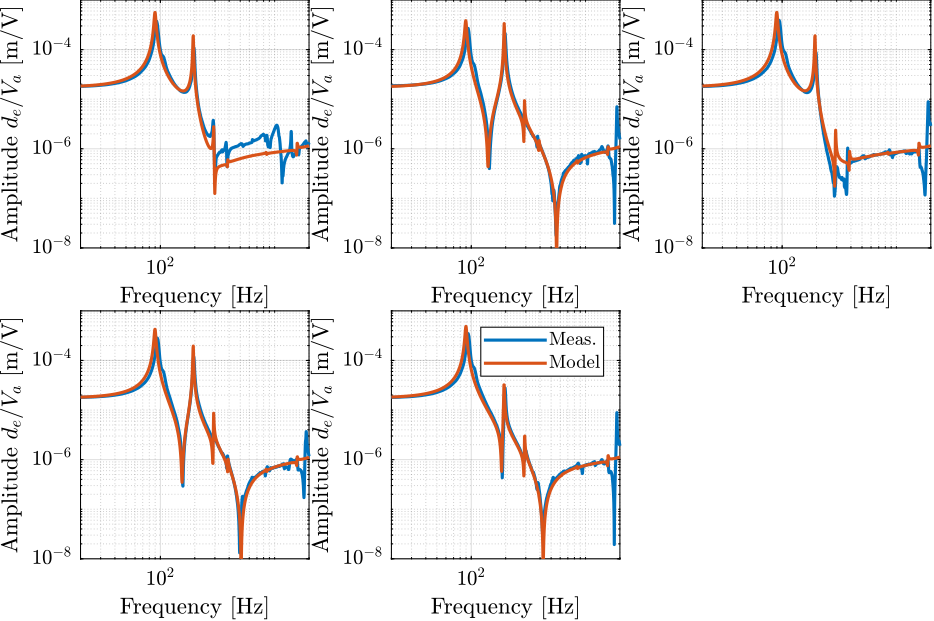
Figure 92: Comparison (model and measurements) of the FRF from DAC voltage u to measured displacement by the encoders for all the struts
By tuning the misalignment of the APA with respect to the flexible joints, it is relatively easy to obtain a good fit between the model and the measurements (Figure 92).
If encoders are to be used when fixed on the struts, it is therefore very important to properly align the APA and the flexible joints when mounting the struts.
This should be achieve by using alignment pins.
6.4 Effect of flexible joint’s stiffness
6.4.1 Effect of bending stiffness of the flexible joints
Let’s initialize an APA which is a little bit misaligned.
n_hexapod.actuator = initializeAPA('type', 'flexible', 'd_align', [0.1e-3; 0.5e-3; 0]);
The bending stiffnesses for which the dynamics is identified are defined below.
%% Tested bending stiffnesses [Nm/rad]
kRs = [3, 4, 5, 6, 7];
Then the identification is performed for all the values of the bending stiffnesses.
%% Idenfity the transfer function from actuator to encoder for all bending stiffnesses Gs = {zeros(length(kRs), 1)}; for i = 1:length(kRs) n_hexapod.flex_bot = initializeBotFlexibleJoint(... 'type', '4dof', ... 'kRx', kRs(i), ... 'kRy', kRs(i)); n_hexapod.flex_top = initializeTopFlexibleJoint(... 'type', '4dof', ... 'kRx', kRs(i), ... 'kRy', kRs(i)); G = exp(-s*Ts)*linearize(mdl, io, 0.0, options); G.InputName = {'Va'}; G.OutputName = {'dL'}; Gs(i) = {G}; end
The obtained dynamics from DAC voltage to encoder measurements are compared in Figure 93. It is clear that the bending stiffness has a negligible impact on the observed dynamics.
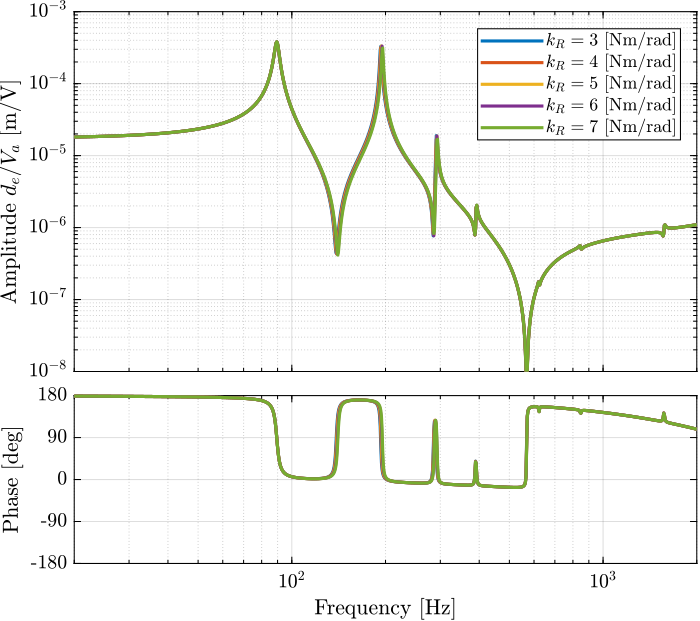
Figure 93: Dynamics from DAC output to encoder for several bending stiffnesses
6.4.2 Effect of axial stiffness of the flexible joints
The axial stiffnesses for which the dynamics is identified are defined below.
%% Tested axial stiffnesses [N/m]
kzs = [5e7 7.5e7 1e8 2.5e8];
Then the identification is performed for all the values of the bending stiffnesses.
%% Idenfity the transfer function from actuator to encoder for all bending stiffnesses Gs = {zeros(length(kzs), 1)}; for i = 1:length(kzs) n_hexapod.flex_bot = initializeBotFlexibleJoint(... 'type', '4dof', ... 'kz', kzs(i)); n_hexapod.flex_top = initializeTopFlexibleJoint(... 'type', '4dof', ... 'kz', kzs(i)); G = exp(-s*Ts)*linearize(mdl, io, 0.0, options); G.InputName = {'Va'}; G.OutputName = {'dL'}; Gs(i) = {G}; end
The obtained dynamics from DAC voltage to encoder measurements are compared in Figure 93.
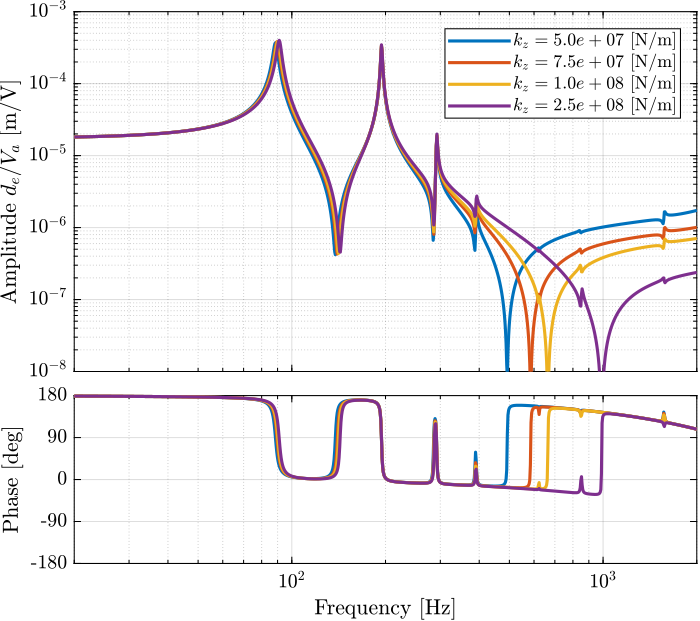
Figure 94: Dynamics from DAC output to encoder for several axial stiffnesses
The axial stiffness of the flexible joint has a large impact on the frequency of the complex conjugate zero. Using the measured FRF on the test-bench, if is therefore possible to estimate the axial stiffness of the flexible joints from le location of the zero. This method gives nice match between the measured FRF and the one extracted from the simscape model, however it could give not so accurate values of the joint’s axial stiffness as other factors are also influencing the location of the zero.
Using this method, an axial stiffness of \(70 N/\mu m\) is found to give good results (and is reasonable based on the finite element models).
6.4.3 Effect of bending damping
7 Function
7.1 initializeBotFlexibleJoint - Initialize Flexible Joint
Function description
function [flex_bot] = initializeBotFlexibleJoint(args) % initializeBotFlexibleJoint - % % Syntax: [flex_bot] = initializeBotFlexibleJoint(args) % % Inputs: % - args - % % Outputs: % - flex_bot -
Optional Parameters
arguments args.type char {mustBeMember(args.type,{'2dof', '3dof', '4dof'})} = '2dof' args.kRx (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*5 args.kRy (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*5 args.kRz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*260 args.kz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*7e7 args.cRx (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 args.cRy (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 args.cRz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 args.cz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 end
Initialize the structure
flex_bot = struct();
Set the Joint’s type
switch args.type case '2dof' flex_bot.type = 1; case '3dof' flex_bot.type = 2; case '4dof' flex_bot.type = 3; end
Set parameters
flex_bot.kRx = args.kRx; flex_bot.kRy = args.kRy; flex_bot.kRz = args.kRz; flex_bot.kz = args.kz;
flex_bot.cRx = args.cRx; flex_bot.cRy = args.cRy; flex_bot.cRz = args.cRz; flex_bot.cz = args.cz;
7.2 initializeTopFlexibleJoint - Initialize Flexible Joint
Function description
function [flex_top] = initializeTopFlexibleJoint(args) % initializeTopFlexibleJoint - % % Syntax: [flex_top] = initializeTopFlexibleJoint(args) % % Inputs: % - args - % % Outputs: % - flex_top -
Optional Parameters
arguments args.type char {mustBeMember(args.type,{'2dof', '3dof', '4dof'})} = '2dof' args.kRx (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*5 args.kRy (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*5 args.kRz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*260 args.kz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*7e7 args.cRx (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 args.cRy (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 args.cRz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 args.cz (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.001 end
Initialize the structure
flex_top = struct();
Set the Joint’s type
switch args.type case '2dof' flex_top.type = 1; case '3dof' flex_top.type = 2; case '4dof' flex_top.type = 3; end
Set parameters
flex_top.kRx = args.kRx; flex_top.kRy = args.kRy; flex_top.kRz = args.kRz; flex_top.kz = args.kz;
flex_top.cRx = args.cRx; flex_top.cRy = args.cRy; flex_top.cRz = args.cRz; flex_top.cz = args.cz;
7.3 initializeAPA - Initialize APA
Function description
function [actuator] = initializeAPA(args) % initializeAPA - % % Syntax: [actuator] = initializeAPA(args) % % Inputs: % - args - % % Outputs: % - actuator -
Optional Parameters
arguments args.type char {mustBeMember(args.type,{'2dof', 'flexible frame', 'flexible'})} = '2dof' % Actuator and Sensor constants args.Ga (1,1) double {mustBeNumeric} = 0 args.Gs (1,1) double {mustBeNumeric} = 0 % For 2DoF args.k (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*0.38e6 args.ke (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*1.75e6 args.ka (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*3e7 args.c (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*3e1 args.ce (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*2e1 args.ca (6,1) double {mustBeNumeric, mustBePositive} = ones(6,1)*2e1 args.Leq (6,1) double {mustBeNumeric} = ones(6,1)*0.056 % Force Flexible APA args.xi (1,1) double {mustBeNumeric, mustBePositive} = 0.01 args.d_align (3,1) double {mustBeNumeric} = zeros(3,1) % [m] % For Flexible Frame args.ks (1,1) double {mustBeNumeric, mustBePositive} = 235e6 args.cs (1,1) double {mustBeNumeric, mustBePositive} = 1e1 end
Initialize Structure
actuator = struct();
Type
switch args.type case '2dof' actuator.type = 1; case 'flexible frame' actuator.type = 2; case 'flexible' actuator.type = 3; end
Actuator/Sensor Constants
if args.Ga == 0 switch args.type case '2dof' actuator.Ga = -30.0; case 'flexible frame' actuator.Ga = 1; % TODO case 'flexible' actuator.Ga = 23.4; end else actuator.Ga = args.Ga; % Actuator gain [N/V] end
if args.Gs == 0 switch args.type case '2dof' actuator.Gs = 0.098; case 'flexible frame' actuator.Gs = 1; % TODO case 'flexible' actuator.Gs = -4674824; end else actuator.Gs = args.Gs; % Sensor gain [V/m] end
2DoF parameters
actuator.k = args.k; % [N/m] actuator.ke = args.ke; % [N/m] actuator.ka = args.ka; % [N/m] actuator.c = args.c; % [N/(m/s)] actuator.ce = args.ce; % [N/(m/s)] actuator.ca = args.ca; % [N/(m/s)] actuator.Leq = args.Leq; % [m]
Flexible frame and fully flexible
switch args.type case 'flexible frame' actuator.K = readmatrix('APA300ML_b_mat_K.CSV'); % Stiffness Matrix actuator.M = readmatrix('APA300ML_b_mat_M.CSV'); % Mass Matrix actuator.P = extractNodes('APA300ML_b_out_nodes_3D.txt'); % Node coordinates [m] case 'flexible' actuator.K = readmatrix('full_APA300ML_K.CSV'); % Stiffness Matrix actuator.M = readmatrix('full_APA300ML_M.CSV'); % Mass Matrix actuator.P = extractNodes('full_APA300ML_out_nodes_3D.txt'); % Node coordiantes [m] actuator.d_align = args.d_align; end actuator.xi = args.xi; % Damping ratio actuator.ks = args.ks; % Stiffness of one stack [N/m] actuator.cs = args.cs; % Damping of one stack [N/m]
7.4 generateSweepExc: Generate sweep sinus excitation
Function description
function [U_exc] = generateSweepExc(args) % generateSweepExc - Generate a Sweep Sine excitation signal % % Syntax: [U_exc] = generateSweepExc(args) % % Inputs: % - args - Optinal arguments: % - Ts - Sampling Time - [s] % - f_start - Start frequency of the sweep - [Hz] % - f_end - End frequency of the sweep - [Hz] % - V_mean - Mean value of the excitation voltage - [V] % - V_exc - Excitation Amplitude for the Sweep, could be numeric or TF - [V] % - t_start - Time at which the sweep begins - [s] % - exc_duration - Duration of the sweep - [s] % - sweep_type - 'logarithmic' or 'linear' - [-] % - smooth_ends - 'true' or 'false': smooth transition between 0 and V_mean - [-]
Optional Parameters
arguments args.Ts (1,1) double {mustBeNumeric, mustBePositive} = 1e-4 args.f_start (1,1) double {mustBeNumeric, mustBePositive} = 1 args.f_end (1,1) double {mustBeNumeric, mustBePositive} = 1e3 args.V_mean (1,1) double {mustBeNumeric} = 0 args.V_exc = 1 args.t_start (1,1) double {mustBeNumeric, mustBeNonnegative} = 5 args.exc_duration (1,1) double {mustBeNumeric, mustBePositive} = 10 args.sweep_type char {mustBeMember(args.sweep_type,{'log', 'lin'})} = 'lin' args.smooth_ends logical {mustBeNumericOrLogical} = true end
Sweep Sine part
t_sweep = 0:args.Ts:args.exc_duration; if strcmp(args.sweep_type, 'log') V_exc = sin(2*pi*args.f_start * args.exc_duration/log(args.f_end/args.f_start) * (exp(log(args.f_end/args.f_start)*t_sweep/args.exc_duration) - 1)); elseif strcmp(args.sweep_type, 'lin') V_exc = sin(2*pi*(args.f_start + (args.f_end - args.f_start)/2/args.exc_duration*t_sweep).*t_sweep); else error('sweep_type should either be equal to "log" or to "lin"'); end
if isnumeric(args.V_exc) V_sweep = args.V_mean + args.V_exc*V_exc; elseif isct(args.V_exc) if strcmp(args.sweep_type, 'log') V_sweep = args.V_mean + abs(squeeze(freqresp(args.V_exc, args.f_start*(args.f_end/args.f_start).^(t_sweep/args.exc_duration), 'Hz')))'.*V_exc; elseif strcmp(args.sweep_type, 'lin') V_sweep = args.V_mean + abs(squeeze(freqresp(args.V_exc, args.f_start+(args.f_end-args.f_start)/args.exc_duration*t_sweep, 'Hz')))'.*V_exc; end end
Smooth Ends
if args.t_start > 0 t_smooth_start = args.Ts:args.Ts:args.t_start; V_smooth_start = zeros(size(t_smooth_start)); V_smooth_end = zeros(size(t_smooth_start)); if args.smooth_ends Vd_max = args.V_mean/(0.7*args.t_start); V_d = zeros(size(t_smooth_start)); V_d(t_smooth_start < 0.2*args.t_start) = t_smooth_start(t_smooth_start < 0.2*args.t_start)*Vd_max/(0.2*args.t_start); V_d(t_smooth_start > 0.2*args.t_start & t_smooth_start < 0.7*args.t_start) = Vd_max; V_d(t_smooth_start > 0.7*args.t_start & t_smooth_start < 0.9*args.t_start) = Vd_max - (t_smooth_start(t_smooth_start > 0.7*args.t_start & t_smooth_start < 0.9*args.t_start) - 0.7*args.t_start)*Vd_max/(0.2*args.t_start); V_smooth_start = cumtrapz(V_d)*args.Ts; V_smooth_end = args.V_mean - V_smooth_start; end else V_smooth_start = []; V_smooth_end = []; end
Combine Excitation signals
V_exc = [V_smooth_start, V_sweep, V_smooth_end]; t_exc = args.Ts*[0:1:length(V_exc)-1];
U_exc = [t_exc; V_exc];
7.5 generateShapedNoise: Generate Shaped Noise excitation
Function description
function [U_exc] = generateShapedNoise(args) % generateShapedNoise - Generate a Shaped Noise excitation signal % % Syntax: [U_exc] = generateShapedNoise(args) % % Inputs: % - args - Optinal arguments: % - Ts - Sampling Time - [s] % - V_mean - Mean value of the excitation voltage - [V] % - V_exc - Excitation Amplitude, could be numeric or TF - [V rms] % - t_start - Time at which the noise begins - [s] % - exc_duration - Duration of the noise - [s] % - smooth_ends - 'true' or 'false': smooth transition between 0 and V_mean - [-]
Optional Parameters
arguments args.Ts (1,1) double {mustBeNumeric, mustBePositive} = 1e-4 args.V_mean (1,1) double {mustBeNumeric} = 0 args.V_exc = 1 args.t_start (1,1) double {mustBeNumeric, mustBePositive} = 5 args.exc_duration (1,1) double {mustBeNumeric, mustBePositive} = 10 args.smooth_ends logical {mustBeNumericOrLogical} = true end
Shaped Noise
t_noise = 0:args.Ts:args.exc_duration;
if isnumeric(args.V_exc) V_noise = args.V_mean + args.V_exc*sqrt(1/args.Ts/2)*randn(length(t_noise), 1)'; elseif isct(args.V_exc) V_noise = args.V_mean + lsim(args.V_exc, sqrt(1/args.Ts/2)*randn(length(t_noise), 1), t_noise)'; end
Smooth Ends
t_smooth_start = args.Ts:args.Ts:args.t_start; V_smooth_start = zeros(size(t_smooth_start)); V_smooth_end = zeros(size(t_smooth_start)); if args.smooth_ends Vd_max = args.V_mean/(0.7*args.t_start); V_d = zeros(size(t_smooth_start)); V_d(t_smooth_start < 0.2*args.t_start) = t_smooth_start(t_smooth_start < 0.2*args.t_start)*Vd_max/(0.2*args.t_start); V_d(t_smooth_start > 0.2*args.t_start & t_smooth_start < 0.7*args.t_start) = Vd_max; V_d(t_smooth_start > 0.7*args.t_start & t_smooth_start < 0.9*args.t_start) = Vd_max - (t_smooth_start(t_smooth_start > 0.7*args.t_start & t_smooth_start < 0.9*args.t_start) - 0.7*args.t_start)*Vd_max/(0.2*args.t_start); V_smooth_start = cumtrapz(V_d)*args.Ts; V_smooth_end = args.V_mean - V_smooth_start; end
Combine Excitation signals
V_exc = [V_smooth_start, V_noise, V_smooth_end]; t_exc = args.Ts*[0:1:length(V_exc)-1];
U_exc = [t_exc; V_exc];
7.6 generateSinIncreasingAmpl: Generate Sinus with increasing amplitude
Function description
function [U_exc] = generateSinIncreasingAmpl(args) % generateSinIncreasingAmpl - Generate Sinus with increasing amplitude % % Syntax: [U_exc] = generateSinIncreasingAmpl(args) % % Inputs: % - args - Optinal arguments: % - Ts - Sampling Time - [s] % - V_mean - Mean value of the excitation voltage - [V] % - sin_ampls - Excitation Amplitudes - [V] % - sin_freq - Excitation Frequency - [Hz] % - sin_num - Number of period for each amplitude - [-] % - t_start - Time at which the excitation begins - [s] % - smooth_ends - 'true' or 'false': smooth transition between 0 and V_mean - [-]
Optional Parameters
arguments args.Ts (1,1) double {mustBeNumeric, mustBePositive} = 1e-4 args.V_mean (1,1) double {mustBeNumeric} = 0 args.sin_ampls double {mustBeNumeric, mustBePositive} = [0.1, 0.2, 0.3] args.sin_period (1,1) double {mustBeNumeric, mustBePositive} = 1 args.sin_num (1,1) double {mustBeNumeric, mustBePositive, mustBeInteger} = 3 args.t_start (1,1) double {mustBeNumeric, mustBePositive} = 5 args.smooth_ends logical {mustBeNumericOrLogical} = true end
Sinus excitation
t_noise = 0:args.Ts:args.sin_period*args.sin_num; sin_exc = [];
for sin_ampl = args.sin_ampls sin_exc = [sin_exc, args.V_mean + sin_ampl*sin(2*pi/args.sin_period*t_noise)]; end
Smooth Ends
t_smooth_start = args.Ts:args.Ts:args.t_start; V_smooth_start = zeros(size(t_smooth_start)); V_smooth_end = zeros(size(t_smooth_start)); if args.smooth_ends Vd_max = args.V_mean/(0.7*args.t_start); V_d = zeros(size(t_smooth_start)); V_d(t_smooth_start < 0.2*args.t_start) = t_smooth_start(t_smooth_start < 0.2*args.t_start)*Vd_max/(0.2*args.t_start); V_d(t_smooth_start > 0.2*args.t_start & t_smooth_start < 0.7*args.t_start) = Vd_max; V_d(t_smooth_start > 0.7*args.t_start & t_smooth_start < 0.9*args.t_start) = Vd_max - (t_smooth_start(t_smooth_start > 0.7*args.t_start & t_smooth_start < 0.9*args.t_start) - 0.7*args.t_start)*Vd_max/(0.2*args.t_start); V_smooth_start = cumtrapz(V_d)*args.Ts; V_smooth_end = args.V_mean - V_smooth_start; end
Combine Excitation signals
V_exc = [V_smooth_start, sin_exc, V_smooth_end]; t_exc = args.Ts*[0:1:length(V_exc)-1];
U_exc = [t_exc; V_exc];