Stewart Platform - Decentralized Active Damping
Table of Contents
The following decentralized active damping techniques are briefly studied:
- Inertial Control (proportional feedback of the absolute velocity): Section 1
- Integral Force Feedback: Section 2
- Direct feedback of the relative velocity of each strut: Section 3
1 Inertial Control
1.1 Identification of the Dynamics
stewart = initializeFramesPositions('H', 90e-3, 'MO_B', 45e-3); stewart = generateGeneralConfiguration(stewart); stewart = computeJointsPose(stewart); stewart = initializeStrutDynamics(stewart); stewart = initializeJointDynamics(stewart, 'disable', true); stewart = initializeCylindricalPlatforms(stewart); stewart = initializeCylindricalStruts(stewart); stewart = computeJacobian(stewart); stewart = initializeStewartPose(stewart);
%% Options for Linearized options = linearizeOptions; options.SampleTime = 0; %% Name of the Simulink File mdl = 'stewart_active_damping'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; % Actuator Force Inputs [N] io(io_i) = linio([mdl, '/Vm'], 1, 'openoutput'); io_i = io_i + 1; % Absolute velocity of each leg [m/s] %% Run the linearization G = linearize(mdl, io, options); G.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'}; G.OutputName = {'Vm1', 'Vm2', 'Vm3', 'Vm4', 'Vm5', 'Vm6'};
The transfer function from actuator forces to force sensors is shown in Figure 1.
1.2 Effect of the Flexible Joint stiffness on the Dynamics
We add some stiffness and damping in the flexible joints and we re-identify the dynamics.
stewart = initializeJointDynamics(stewart);
Gf = linearize(mdl, io, options);
Gf.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
Gf.OutputName = {'Vm1', 'Vm2', 'Vm3', 'Vm4', 'Vm5', 'Vm6'};
The new dynamics from force actuator to force sensor is shown in Figure 2.
1.3 Obtained Damping
The control is a performed in a decentralized manner. The \(6 \times 6\) control is a diagonal matrix with pure proportional action on the diagonal: \[ K(s) = g \begin{bmatrix} 1 & & 0 \\ & \ddots & \\ 0 & & 1 \end{bmatrix} \]
The root locus is shown in figure 3 and the obtained pole damping function of the control gain is shown in figure 4.
1.4 Conclusion
Joint stiffness does increase the resonance frequencies of the system but does not change the attainable damping when using relative motion sensors.
2 Integral Force Feedback
2.1 Identification of the Dynamics with perfect Joints
We first initialize the Stewart platform without joint stiffness.
stewart = initializeFramesPositions('H', 90e-3, 'MO_B', 45e-3); stewart = generateGeneralConfiguration(stewart); stewart = computeJointsPose(stewart); stewart = initializeStrutDynamics(stewart); stewart = initializeJointDynamics(stewart, 'disable', true); stewart = initializeCylindricalPlatforms(stewart); stewart = initializeCylindricalStruts(stewart); stewart = computeJacobian(stewart); stewart = initializeStewartPose(stewart);
And we identify the dynamics from force actuators to force sensors.
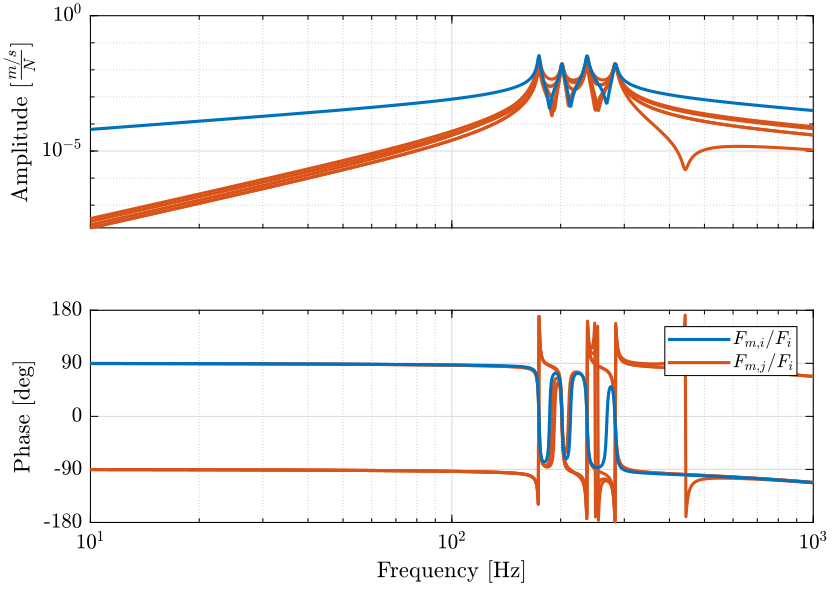
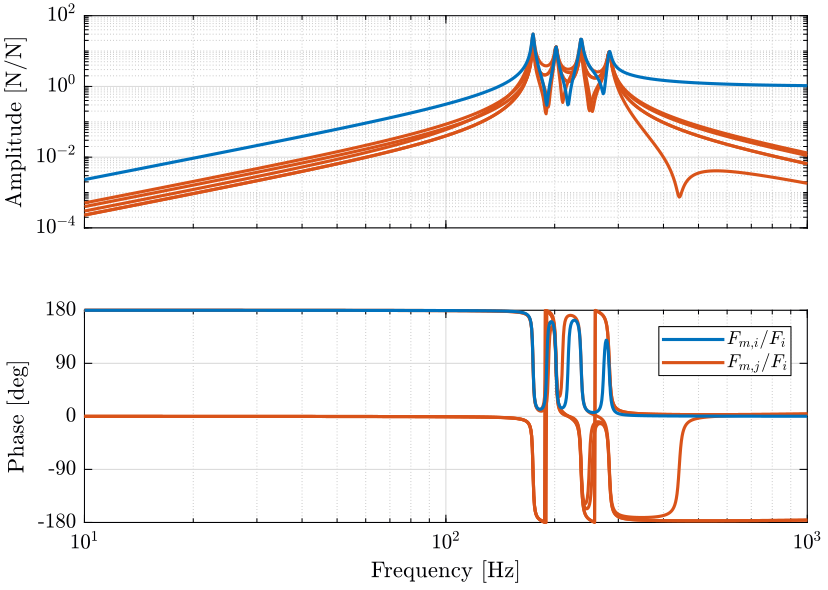
%% Options for Linearized options = linearizeOptions; options.SampleTime = 0; %% Name of the Simulink File mdl = 'stewart_active_damping'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; % Actuator Force Inputs [N] io(io_i) = linio([mdl, '/Fm'], 1, 'openoutput'); io_i = io_i + 1; % Force Sensor Outputs [N] %% Run the linearization G = linearize(mdl, io, options); G.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'}; G.OutputName = {'Fm1', 'Fm2', 'Fm3', 'Fm4', 'Fm5', 'Fm6'};
The transfer function from actuator forces to force sensors is shown in Figure 5.
2.2 Effect of the Flexible Joint stiffness on the Dynamics
We add some stiffness and damping in the flexible joints and we re-identify the dynamics.
stewart = initializeJointDynamics(stewart);
Gf = linearize(mdl, io, options);
Gf.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
Gf.OutputName = {'Fm1', 'Fm2', 'Fm3', 'Fm4', 'Fm5', 'Fm6'};
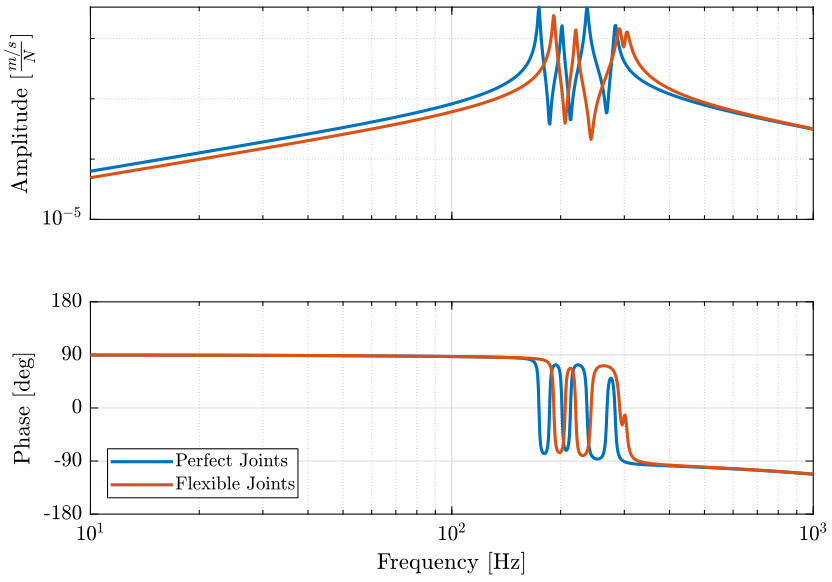
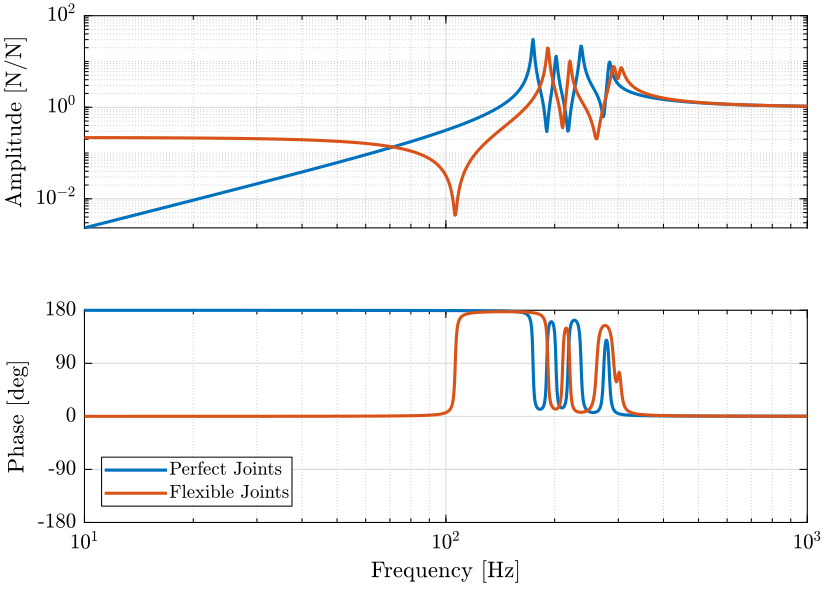
The new dynamics from force actuator to force sensor is shown in Figure 6.
2.3 Obtained Damping
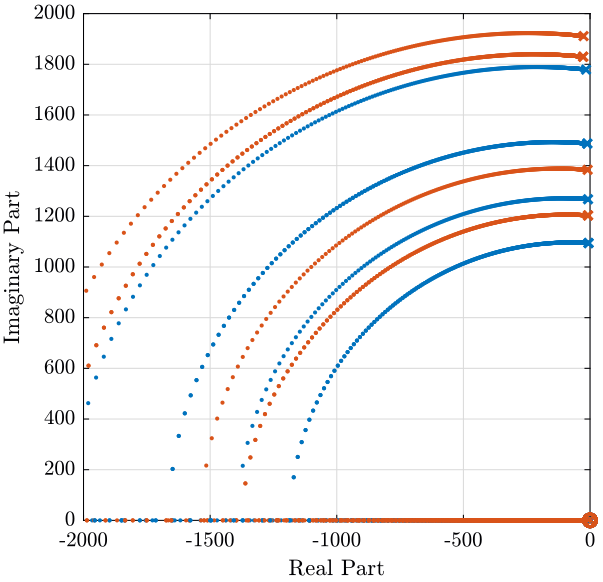
The control is a performed in a decentralized manner. The \(6 \times 6\) control is a diagonal matrix with pure integration action on the diagonal: \[ K(s) = g \begin{bmatrix} \frac{1}{s} & & 0 \\ & \ddots & \\ 0 & & \frac{1}{s} \end{bmatrix} \]
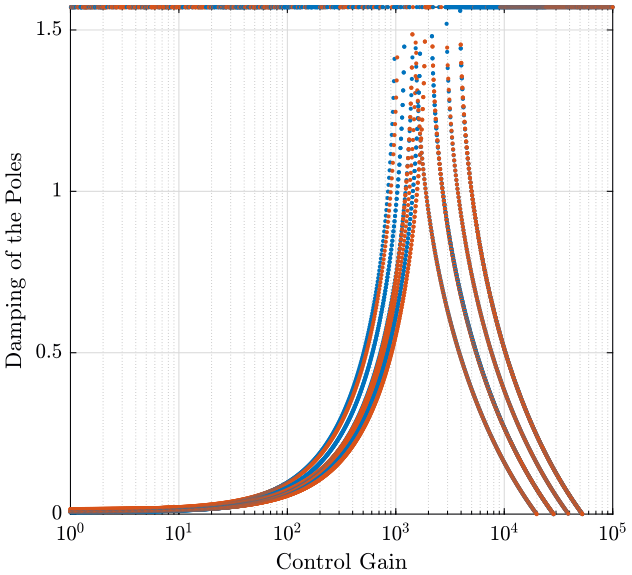
The root locus is shown in figure 7 and the obtained pole damping function of the control gain is shown in figure 8.
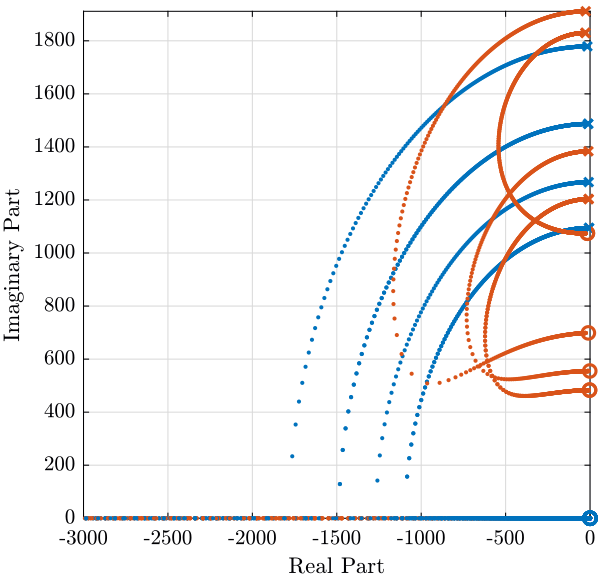
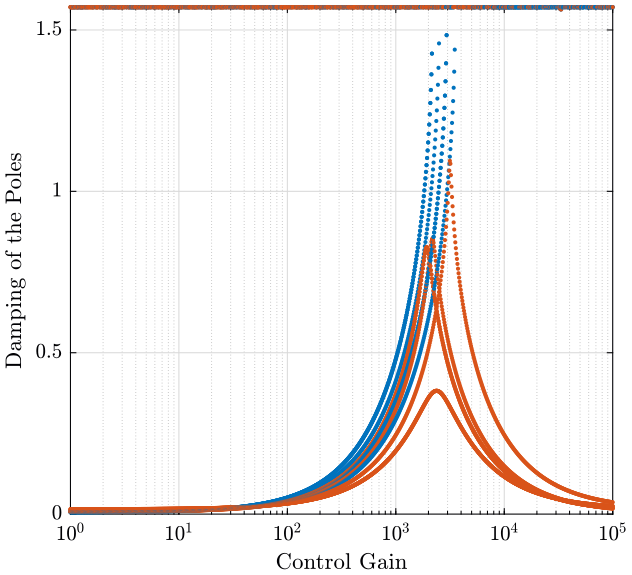
2.4 Conclusion
The joint stiffness has a huge impact on the attainable active damping performance when using force sensors. Thus, if Integral Force Feedback is to be used in a Stewart platform with flexible joints, the rotational stiffness of the joints should be minimized.
3 Direct Velocity Feedback
3.1 Identification of the Dynamics with perfect Joints
We first initialize the Stewart platform without joint stiffness.
stewart = initializeFramesPositions('H', 90e-3, 'MO_B', 45e-3); stewart = generateGeneralConfiguration(stewart); stewart = computeJointsPose(stewart); stewart = initializeStrutDynamics(stewart); stewart = initializeJointDynamics(stewart, 'disable', true); stewart = initializeCylindricalPlatforms(stewart); stewart = initializeCylindricalStruts(stewart); stewart = computeJacobian(stewart); stewart = initializeStewartPose(stewart);
And we identify the dynamics from force actuators to force sensors.
%% Options for Linearized options = linearizeOptions; options.SampleTime = 0; %% Name of the Simulink File mdl = 'stewart_active_damping'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/F'], 1, 'openinput'); io_i = io_i + 1; % Actuator Force Inputs [N] io(io_i) = linio([mdl, '/Dm'], 1, 'openoutput'); io_i = io_i + 1; % Relative Displacement Outputs [N] %% Run the linearization G = linearize(mdl, io, options); G.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'}; G.OutputName = {'Dm1', 'Dm2', 'Dm3', 'Dm4', 'Dm5', 'Dm6'};
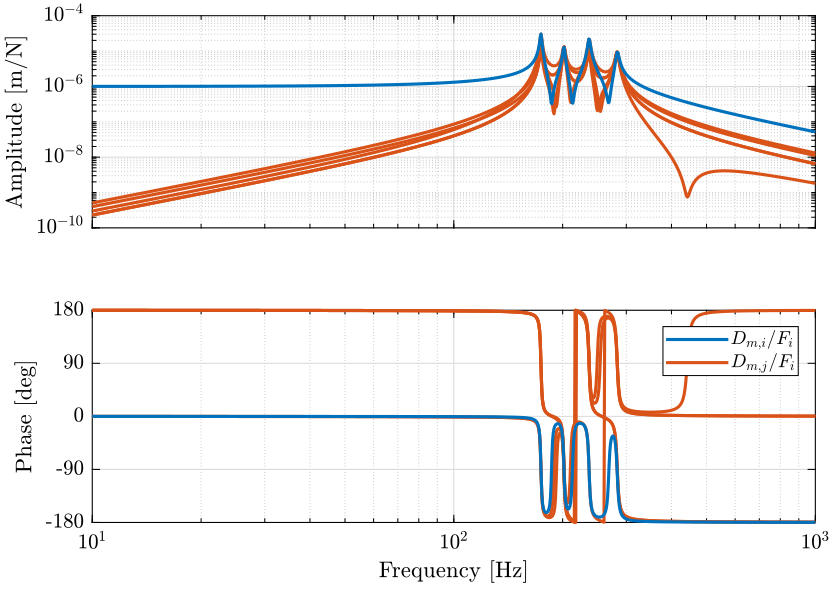
The transfer function from actuator forces to relative motion sensors is shown in Figure 9.
3.2 Effect of the Flexible Joint stiffness on the Dynamics
We add some stiffness and damping in the flexible joints and we re-identify the dynamics.
stewart = initializeJointDynamics(stewart);
Gf = linearize(mdl, io, options);
Gf.InputName = {'F1', 'F2', 'F3', 'F4', 'F5', 'F6'};
Gf.OutputName = {'Dm1', 'Dm2', 'Dm3', 'Dm4', 'Dm5', 'Dm6'};
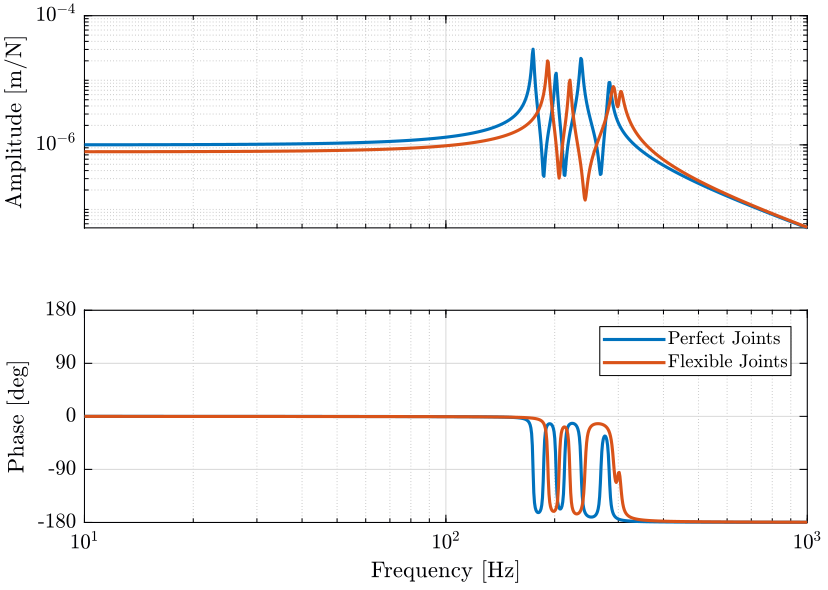
The new dynamics from force actuator to relative motion sensor is shown in Figure 10.
3.3 Obtained Damping
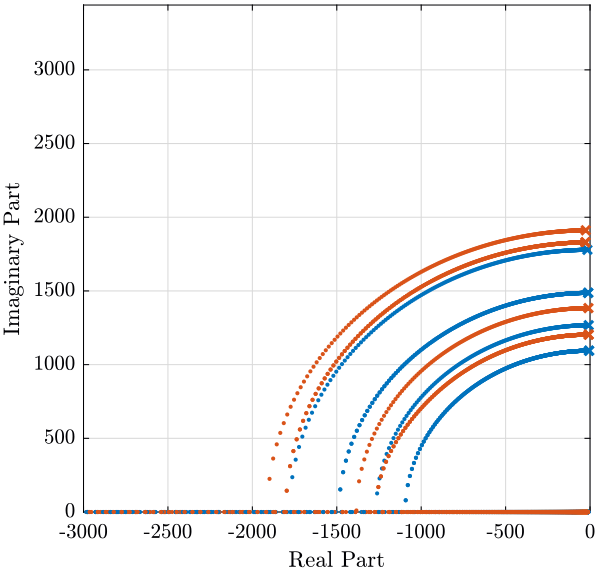
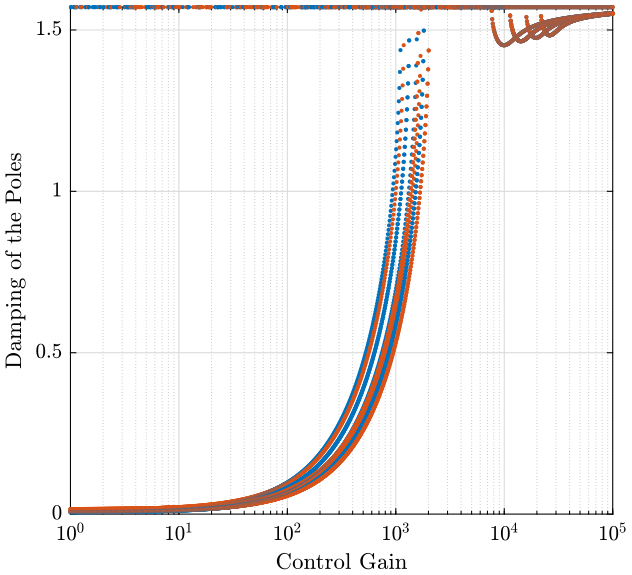
The control is a performed in a decentralized manner. The \(6 \times 6\) control is a diagonal matrix with pure derivative action on the diagonal: \[ K(s) = g \begin{bmatrix} s & & \\ & \ddots & \\ & & s \end{bmatrix} \]
The root locus is shown in figure 11 and the obtained pole damping function of the control gain is shown in figure 12.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3.4 Conclusion
Joint stiffness does increase the resonance frequencies of the system but does not change the attainable damping when using relative motion sensors.