HAC-LAC applied on the Simscape Model
Table of Contents
The position \(\bm{\mathcal{X}}\) of the Sample with respect to the granite is measured.
It is then compare to the wanted position of the Sample \(\bm{r}_\mathcal{X}\) in order to obtain the position error \(\bm{\epsilon}_\mathcal{X}\) of the Sample with respect to a frame attached to the Stewart top platform.
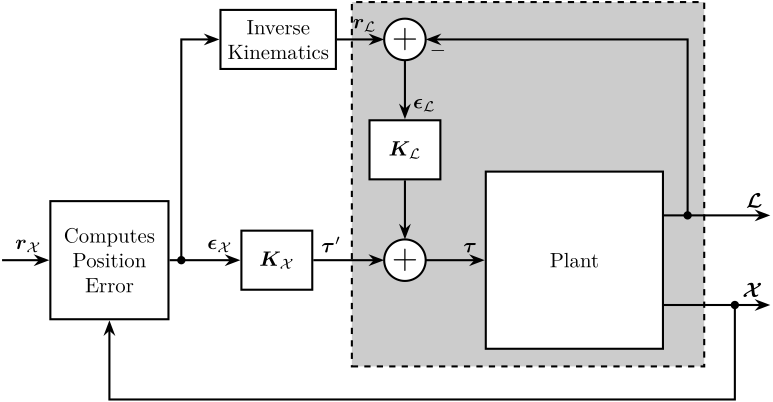
Figure 1: HAC-LAC Control Architecture used for the Control of the NASS
1 Initialization
We initialize all the stages with the default parameters.
initializeGround(); initializeGranite(); initializeTy(); initializeRy(); initializeRz(); initializeMicroHexapod(); initializeAxisc(); initializeMirror();
The nano-hexapod is a piezoelectric hexapod and the sample has a mass of 50kg.
initializeNanoHexapod('actuator', 'piezo'); initializeSample('mass', 1);
We set the references that corresponds to a tomography experiment.
initializeReferences('Rz_type', 'rotating', 'Rz_period', 1);
initializeDisturbances();
Open Loop.
initializeController('type', 'open-loop');
And we put some gravity.
initializeSimscapeConfiguration('gravity', true);
We log the signals.
initializeLoggingConfiguration('log', 'all');
2 Low Authority Control - Direct Velocity Feedback \(\bm{K}_\mathcal{L}\)
The first loop closed corresponds to a direct velocity feedback loop.
The design of the associated decentralized controller is explained in this file.
2.1 Identification
%% Name of the Simulink File mdl = 'nass_model'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Controller'], 1, 'openinput'); io_i = io_i + 1; % Actuator Inputs io(io_i) = linio([mdl, '/Micro-Station'], 3, 'openoutput', [], 'Dnlm'); io_i = io_i + 1; % Relative Motion Outputs %% Run the linearization G_dvf = linearize(mdl, io, 0); G_dvf.InputName = {'Fnl1', 'Fnl2', 'Fnl3', 'Fnl4', 'Fnl5', 'Fnl6'}; G_dvf.OutputName = {'Dnlm1', 'Dnlm2', 'Dnlm3', 'Dnlm4', 'Dnlm5', 'Dnlm6'};
2.2 Plant
2.3 Root Locus
2.4 Controller and Loop Gain
K_dvf = s*15000/(1 + s/2/pi/10000);
K_dvf = -K_dvf*eye(6);
3 Uncertainty Improvements thanks to the LAC control
K_dvf_backup = K_dvf; initializeController('type', 'hac-dvf');
masses = [1, 10, 50]; % [kg]
%% Name of the Simulink File mdl = 'nass_model'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Controller'], 1, 'input'); io_i = io_i + 1; % Actuator Inputs io(io_i) = linio([mdl, '/Tracking Error'], 1, 'output', [], 'En'); io_i = io_i + 1; % Position Errror
4 High Authority Control - \(\bm{K}_\mathcal{X}\)
4.1 Identification of the damped plant
Kx = tf(zeros(6));
initializeController('type', 'hac-dvf');
%% Name of the Simulink File mdl = 'nass_model'; %% Input/Output definition clear io; io_i = 1; io(io_i) = linio([mdl, '/Controller'], 1, 'input'); io_i = io_i + 1; % Actuator Inputs io(io_i) = linio([mdl, '/Tracking Error'], 1, 'output', [], 'En'); io_i = io_i + 1; % Position Errror %% Run the linearization G = linearize(mdl, io, 0); G.InputName = {'Fnl1', 'Fnl2', 'Fnl3', 'Fnl4', 'Fnl5', 'Fnl6'}; G.OutputName = {'Ex', 'Ey', 'Ez', 'Erx', 'Ery', 'Erz'};
The minus sine is put here because there is already a minus sign included due to the computation of the position error.
load('mat/stages.mat', 'nano_hexapod'); Gx = -G*inv(nano_hexapod.J'); Gx.InputName = {'Fx', 'Fy', 'Fz', 'Mx', 'My', 'Mz'};
4.2 Controller Design
The controller consists of:
- A pure integrator
- A Second integrator up to half the wanted bandwidth
- A Lead around the cross-over frequency
- A low pass filter with a cut-off equal to two times the wanted bandwidth
wc = 2*pi*15; % Bandwidth Bandwidth [rad/s] h = 1.5; % Lead parameter Kx = (1/h) * (1 + s/wc*h)/(1 + s/wc/h) * wc/s * ((s/wc*2 + 1)/(s/wc*2)) * (1/(1 + s/wc/2)); % Normalization of the gain of have a loop gain of 1 at frequency wc Kx = Kx.*diag(1./diag(abs(freqresp(Gx*Kx, wc))));
isstable(feedback(Gx*Kx, eye(6), -1))
Kx = inv(nano_hexapod.J')*Kx;
isstable(feedback(G*Kx, eye(6), 1))
5 Simulation
load('mat/conf_simulink.mat'); set_param(conf_simulink, 'StopTime', '2');
And we simulate the system.
sim('nass_model');
hac_dvf = simout; save('./mat/tomo_exp_hac_lac.mat', 'hac_dvf');
6 Results
Let’s load the simulation when no control is applied.
load('./mat/experiment_tomography.mat', 'tomo_align_dist'); load('./mat/tomo_exp_hac_lac.mat', 'hac_dvf');