Control of the NASS with optimal stiffness
Table of Contents
1 Low Authority Control - Decentralized Integral Force Feedback
1.1 Initialization
We initialize all the stages with the default parameters.
initializeGround(); initializeGranite(); initializeTy(); initializeRy(); initializeRz(); initializeMicroHexapod(); initializeAxisc(); initializeMirror();
We set the references that corresponds to a tomography experiment.
initializeReferences('Rz_type', 'rotating-not-filtered', 'Rz_period', 1); initializeSimscapeConfiguration(); initializeDisturbances('enable', false); initializeLoggingConfiguration('log', 'none');
initializeController('type', 'hac-iff');
1.2 Identification
Kx = tf(zeros(6)); Kiff = tf(zeros(6));
Ms = [1, 10, 50];
Gm_iff = {zeros(length(Ms), 1)};
initializeNanoHexapod('k', 1e5, 'c', 2e2);
1.3 Controller Design
Root Locus
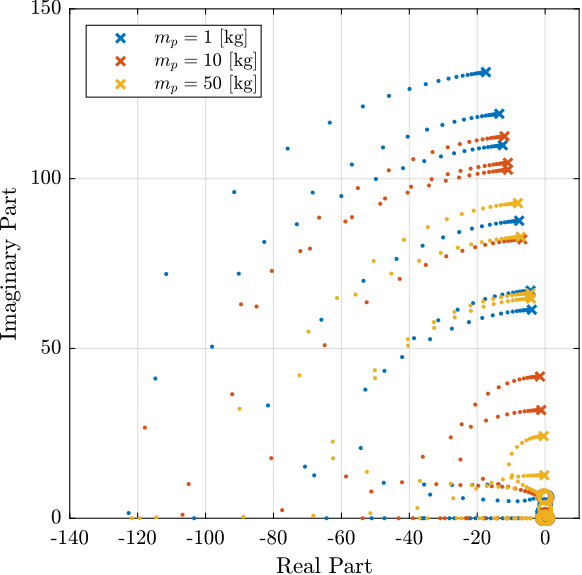
Figure 1: Root Locus for the
Damping as function of the gain