Stewart Platform - Simscape Model
Table of Contents
- 1.
initializeStewartPlatform: Initialize the Stewart Platform structure - 2.
initializeFramesPositions: Initialize the positions of frames {A}, {B}, {F} and {M} - 3.
generateGeneralConfiguration: Generate a Very General Configuration - 4.
computeJointsPose: Compute the Pose of the Joints - 5.
initializeStewartPose: Determine the initial stroke in each leg to have the wanted pose - 6.
initializeCylindricalPlatforms: Initialize the geometry of the Fixed and Mobile Platforms - 7.
initializeCylindricalStruts: Define the inertia of cylindrical struts - 8.
initializeStrutDynamics: Add Stiffness and Damping properties of each strut - 9.
initializeAmplifiedStrutDynamics: Add Stiffness and Damping properties of each strut for an amplified piezoelectric actuator - 10.
initializeJointDynamics: Add Stiffness and Damping properties for spherical joints - 11.
initializeInertialSensor: Initialize the inertial sensor in each strut - 12.
displayArchitecture: 3D plot of the Stewart platform architecture - 13.
describeStewartPlatform: Display some text describing the current defined Stewart Platform - 14.
generateCubicConfiguration: Generate a Cubic Configuration - 15.
computeJacobian: Compute the Jacobian Matrix - 16.
inverseKinematics: Compute Inverse Kinematics - 17.
forwardKinematicsApprox: Compute the Approximate Forward Kinematics
Stewart platforms are generated in multiple steps.
We define 4 important frames:
- \(\{F\}\): Frame fixed to the Fixed base and located at the center of its bottom surface. This is used to fix the Stewart platform to some support.
- \(\{M\}\): Frame fixed to the Moving platform and located at the center of its top surface. This is used to place things on top of the Stewart platform.
- \(\{A\}\): Frame fixed to the fixed base. It defined the center of rotation of the moving platform.
- \(\{B\}\): Frame fixed to the moving platform. The motion of the moving platforms and forces applied to it are defined with respect to this frame \(\{B\}\).
Then, we define the location of the spherical joints:
- \(\bm{a}_{i}\) are the position of the spherical joints fixed to the fixed base
- \(\bm{b}_{i}\) are the position of the spherical joints fixed to the moving platform
We define the rest position of the Stewart platform:
- For simplicity, we suppose that the fixed base and the moving platform are parallel and aligned with the vertical axis at their rest position.
- Thus, to define the rest position of the Stewart platform, we just have to defined its total height \(H\). \(H\) corresponds to the distance from the bottom of the fixed base to the top of the moving platform.
From \(\bm{a}_{i}\) and \(\bm{b}_{i}\), we can determine the length and orientation of each strut:
- \(l_{i}\) is the length of the strut
- \({}^{A}\hat{\bm{s}}_{i}\) is the unit vector align with the strut
The position of the Spherical joints can be computed using various methods:
- Cubic configuration
- Circular configuration
- Arbitrary position
- These methods should be easily scriptable and corresponds to specific functions that returns \({}^{F}\bm{a}_{i}\) and \({}^{M}\bm{b}_{i}\). The input of these functions are the parameters corresponding to the wanted geometry.
For Simscape, we need:
- The position and orientation of each spherical joint fixed to the fixed base: \({}^{F}\bm{a}_{i}\) and \({}^{F}\bm{R}_{a_{i}}\)
- The position and orientation of each spherical joint fixed to the moving platform: \({}^{M}\bm{b}_{i}\) and \({}^{M}\bm{R}_{b_{i}}\)
- The rest length of each strut: \(l_{i}\)
- The stiffness and damping of each actuator: \(k_{i}\) and \(c_{i}\)
- The position of the frame \(\{A\}\) with respect to the frame \(\{F\}\): \({}^{F}\bm{O}_{A}\)
- The position of the frame \(\{B\}\) with respect to the frame \(\{M\}\): \({}^{M}\bm{O}_{B}\)
1 initializeStewartPlatform: Initialize the Stewart Platform structure
This Matlab function is accessible here.
Documentation

Figure 1: Definition of the position of the frames
Function description
function [stewart] = initializeStewartPlatform() % initializeStewartPlatform - Initialize the stewart structure % % Syntax: [stewart] = initializeStewartPlatform(args) % % Outputs: % - stewart - A structure with the following sub-structures: % - platform_F - % - platform_M - % - joints_F - % - joints_M - % - struts_F - % - struts_M - % - actuators - % - geometry - % - properties -
Initialize the Stewart structure
stewart = struct(); stewart.platform_F = struct(); stewart.platform_M = struct(); stewart.joints_F = struct(); stewart.joints_M = struct(); stewart.struts_F = struct(); stewart.struts_M = struct(); stewart.actuators = struct(); stewart.sensors = struct(); stewart.sensors.inertial = struct(); stewart.sensors.force = struct(); stewart.sensors.relative = struct(); stewart.geometry = struct(); stewart.kinematics = struct();
2 initializeFramesPositions: Initialize the positions of frames {A}, {B}, {F} and {M}
This Matlab function is accessible here.
Documentation
Figure 2: Definition of the position of the frames
Function description
function [stewart] = initializeFramesPositions(stewart, args)
% initializeFramesPositions - Initialize the positions of frames {A}, {B}, {F} and {M}
%
% Syntax: [stewart] = initializeFramesPositions(stewart, args)
%
% Inputs:
% - args - Can have the following fields:
% - H [1x1] - Total Height of the Stewart Platform (height from {F} to {M}) [m]
% - MO_B [1x1] - Height of the frame {B} with respect to {M} [m]
%
% Outputs:
% - stewart - A structure with the following fields:
% - geometry.H [1x1] - Total Height of the Stewart Platform [m]
% - geometry.FO_M [3x1] - Position of {M} with respect to {F} [m]
% - platform_M.MO_B [3x1] - Position of {B} with respect to {M} [m]
% - platform_F.FO_A [3x1] - Position of {A} with respect to {F} [m]
Optional Parameters
arguments
stewart
args.H (1,1) double {mustBeNumeric, mustBePositive} = 90e-3
args.MO_B (1,1) double {mustBeNumeric} = 50e-3
end
Compute the position of each frame
H = args.H; % Total Height of the Stewart Platform [m]
FO_M = [0; 0; H]; % Position of {M} with respect to {F} [m]
MO_B = [0; 0; args.MO_B]; % Position of {B} with respect to {M} [m]
FO_A = MO_B + FO_M; % Position of {A} with respect to {F} [m]
Populate the stewart structure
stewart.geometry.H = H; stewart.geometry.FO_M = FO_M; stewart.platform_M.MO_B = MO_B; stewart.platform_F.FO_A = FO_A;
3 generateGeneralConfiguration: Generate a Very General Configuration
This Matlab function is accessible here.
Documentation
Joints are positions on a circle centered with the Z axis of {F} and {M} and at a chosen distance from {F} and {M}. The radius of the circles can be chosen as well as the angles where the joints are located (see Figure 3).

Figure 3: Position of the joints
Function description
function [stewart] = generateGeneralConfiguration(stewart, args)
% generateGeneralConfiguration - Generate a Very General Configuration
%
% Syntax: [stewart] = generateGeneralConfiguration(stewart, args)
%
% Inputs:
% - args - Can have the following fields:
% - FH [1x1] - Height of the position of the fixed joints with respect to the frame {F} [m]
% - FR [1x1] - Radius of the position of the fixed joints in the X-Y [m]
% - FTh [6x1] - Angles of the fixed joints in the X-Y plane with respect to the X axis [rad]
% - MH [1x1] - Height of the position of the mobile joints with respect to the frame {M} [m]
% - FR [1x1] - Radius of the position of the mobile joints in the X-Y [m]
% - MTh [6x1] - Angles of the mobile joints in the X-Y plane with respect to the X axis [rad]
%
% Outputs:
% - stewart - updated Stewart structure with the added fields:
% - platform_F.Fa [3x6] - Its i'th column is the position vector of joint ai with respect to {F}
% - platform_M.Mb [3x6] - Its i'th column is the position vector of joint bi with respect to {M}
Optional Parameters
arguments
stewart
args.FH (1,1) double {mustBeNumeric, mustBePositive} = 15e-3
args.FR (1,1) double {mustBeNumeric, mustBePositive} = 115e-3;
args.FTh (6,1) double {mustBeNumeric} = [-10, 10, 120-10, 120+10, 240-10, 240+10]*(pi/180);
args.MH (1,1) double {mustBeNumeric, mustBePositive} = 15e-3
args.MR (1,1) double {mustBeNumeric, mustBePositive} = 90e-3;
args.MTh (6,1) double {mustBeNumeric} = [-60+10, 60-10, 60+10, 180-10, 180+10, -60-10]*(pi/180);
end
Compute the pose
Fa = zeros(3,6); Mb = zeros(3,6);
for i = 1:6 Fa(:,i) = [args.FR*cos(args.FTh(i)); args.FR*sin(args.FTh(i)); args.FH]; Mb(:,i) = [args.MR*cos(args.MTh(i)); args.MR*sin(args.MTh(i)); -args.MH]; end
Populate the stewart structure
stewart.platform_F.Fa = Fa; stewart.platform_M.Mb = Mb;
4 computeJointsPose: Compute the Pose of the Joints
This Matlab function is accessible here.
Documentation

Figure 4: Position and orientation of the struts
Function description
function [stewart] = computeJointsPose(stewart)
% computeJointsPose -
%
% Syntax: [stewart] = computeJointsPose(stewart)
%
% Inputs:
% - stewart - A structure with the following fields
% - platform_F.Fa [3x6] - Its i'th column is the position vector of joint ai with respect to {F}
% - platform_M.Mb [3x6] - Its i'th column is the position vector of joint bi with respect to {M}
% - platform_F.FO_A [3x1] - Position of {A} with respect to {F}
% - platform_M.MO_B [3x1] - Position of {B} with respect to {M}
% - geometry.FO_M [3x1] - Position of {M} with respect to {F}
%
% Outputs:
% - stewart - A structure with the following added fields
% - geometry.Aa [3x6] - The i'th column is the position of ai with respect to {A}
% - geometry.Ab [3x6] - The i'th column is the position of bi with respect to {A}
% - geometry.Ba [3x6] - The i'th column is the position of ai with respect to {B}
% - geometry.Bb [3x6] - The i'th column is the position of bi with respect to {B}
% - geometry.l [6x1] - The i'th element is the initial length of strut i
% - geometry.As [3x6] - The i'th column is the unit vector of strut i expressed in {A}
% - geometry.Bs [3x6] - The i'th column is the unit vector of strut i expressed in {B}
% - struts_F.l [6x1] - Length of the Fixed part of the i'th strut
% - struts_M.l [6x1] - Length of the Mobile part of the i'th strut
% - platform_F.FRa [3x3x6] - The i'th 3x3 array is the rotation matrix to orientate the bottom of the i'th strut from {F}
% - platform_M.MRb [3x3x6] - The i'th 3x3 array is the rotation matrix to orientate the top of the i'th strut from {M}
Check the stewart structure elements
assert(isfield(stewart.platform_F, 'Fa'), 'stewart.platform_F should have attribute Fa') Fa = stewart.platform_F.Fa; assert(isfield(stewart.platform_M, 'Mb'), 'stewart.platform_M should have attribute Mb') Mb = stewart.platform_M.Mb; assert(isfield(stewart.platform_F, 'FO_A'), 'stewart.platform_F should have attribute FO_A') FO_A = stewart.platform_F.FO_A; assert(isfield(stewart.platform_M, 'MO_B'), 'stewart.platform_M should have attribute MO_B') MO_B = stewart.platform_M.MO_B; assert(isfield(stewart.geometry, 'FO_M'), 'stewart.geometry should have attribute FO_M') FO_M = stewart.geometry.FO_M;
Compute the position of the Joints
Aa = Fa - repmat(FO_A, [1, 6]); Bb = Mb - repmat(MO_B, [1, 6]); Ab = Bb - repmat(-MO_B-FO_M+FO_A, [1, 6]); Ba = Aa - repmat( MO_B+FO_M-FO_A, [1, 6]);
Compute the strut length and orientation
As = (Ab - Aa)./vecnorm(Ab - Aa); % As_i is the i'th vector of As l = vecnorm(Ab - Aa)';
Bs = (Bb - Ba)./vecnorm(Bb - Ba);
Compute the orientation of the Joints
FRa = zeros(3,3,6); MRb = zeros(3,3,6); for i = 1:6 FRa(:,:,i) = [cross([0;1;0], As(:,i)) , cross(As(:,i), cross([0;1;0], As(:,i))) , As(:,i)]; FRa(:,:,i) = FRa(:,:,i)./vecnorm(FRa(:,:,i)); MRb(:,:,i) = [cross([0;1;0], Bs(:,i)) , cross(Bs(:,i), cross([0;1;0], Bs(:,i))) , Bs(:,i)]; MRb(:,:,i) = MRb(:,:,i)./vecnorm(MRb(:,:,i)); end
Populate the stewart structure
stewart.geometry.Aa = Aa; stewart.geometry.Ab = Ab; stewart.geometry.Ba = Ba; stewart.geometry.Bb = Bb; stewart.geometry.As = As; stewart.geometry.Bs = Bs; stewart.geometry.l = l; stewart.struts_F.l = l/2; stewart.struts_M.l = l/2; stewart.platform_F.FRa = FRa; stewart.platform_M.MRb = MRb;
5 initializeStewartPose: Determine the initial stroke in each leg to have the wanted pose
This Matlab function is accessible here.
Function description
function [stewart] = initializeStewartPose(stewart, args)
% initializeStewartPose - Determine the initial stroke in each leg to have the wanted pose
% It uses the inverse kinematic
%
% Syntax: [stewart] = initializeStewartPose(stewart, args)
%
% Inputs:
% - stewart - A structure with the following fields
% - Aa [3x6] - The positions ai expressed in {A}
% - Bb [3x6] - The positions bi expressed in {B}
% - args - Can have the following fields:
% - AP [3x1] - The wanted position of {B} with respect to {A}
% - ARB [3x3] - The rotation matrix that gives the wanted orientation of {B} with respect to {A}
%
% Outputs:
% - stewart - updated Stewart structure with the added fields:
% - actuators.Leq [6x1] - The 6 needed displacement of the struts from the initial position in [m] to have the wanted pose of {B} w.r.t. {A}
Optional Parameters
arguments
stewart
args.AP (3,1) double {mustBeNumeric} = zeros(3,1)
args.ARB (3,3) double {mustBeNumeric} = eye(3)
end
Use the Inverse Kinematic function
[Li, dLi] = inverseKinematics(stewart, 'AP', args.AP, 'ARB', args.ARB);
Populate the stewart structure
stewart.actuators.Leq = dLi;
6 initializeCylindricalPlatforms: Initialize the geometry of the Fixed and Mobile Platforms
This Matlab function is accessible here.
Function description
function [stewart] = initializeCylindricalPlatforms(stewart, args) % initializeCylindricalPlatforms - Initialize the geometry of the Fixed and Mobile Platforms % % Syntax: [stewart] = initializeCylindricalPlatforms(args) % % Inputs: % - args - Structure with the following fields: % - Fpm [1x1] - Fixed Platform Mass [kg] % - Fph [1x1] - Fixed Platform Height [m] % - Fpr [1x1] - Fixed Platform Radius [m] % - Mpm [1x1] - Mobile Platform Mass [kg] % - Mph [1x1] - Mobile Platform Height [m] % - Mpr [1x1] - Mobile Platform Radius [m] % % Outputs: % - stewart - updated Stewart structure with the added fields: % - platform_F [struct] - structure with the following fields: % - type = 1 % - M [1x1] - Fixed Platform Mass [kg] % - I [3x3] - Fixed Platform Inertia matrix [kg*m^2] % - H [1x1] - Fixed Platform Height [m] % - R [1x1] - Fixed Platform Radius [m] % - platform_M [struct] - structure with the following fields: % - M [1x1] - Mobile Platform Mass [kg] % - I [3x3] - Mobile Platform Inertia matrix [kg*m^2] % - H [1x1] - Mobile Platform Height [m] % - R [1x1] - Mobile Platform Radius [m]
Optional Parameters
arguments
stewart
args.Fpm (1,1) double {mustBeNumeric, mustBePositive} = 1
args.Fph (1,1) double {mustBeNumeric, mustBePositive} = 10e-3
args.Fpr (1,1) double {mustBeNumeric, mustBePositive} = 125e-3
args.Mpm (1,1) double {mustBeNumeric, mustBePositive} = 1
args.Mph (1,1) double {mustBeNumeric, mustBePositive} = 10e-3
args.Mpr (1,1) double {mustBeNumeric, mustBePositive} = 100e-3
end
Compute the Inertia matrices of platforms
I_F = diag([1/12*args.Fpm * (3*args.Fpr^2 + args.Fph^2), ...
1/12*args.Fpm * (3*args.Fpr^2 + args.Fph^2), ...
1/2 *args.Fpm * args.Fpr^2]);
I_M = diag([1/12*args.Mpm * (3*args.Mpr^2 + args.Mph^2), ...
1/12*args.Mpm * (3*args.Mpr^2 + args.Mph^2), ...
1/2 *args.Mpm * args.Mpr^2]);
Populate the stewart structure
stewart.platform_F.type = 1; stewart.platform_F.I = I_F; stewart.platform_F.M = args.Fpm; stewart.platform_F.R = args.Fpr; stewart.platform_F.H = args.Fph;
stewart.platform_M.type = 1; stewart.platform_M.I = I_M; stewart.platform_M.M = args.Mpm; stewart.platform_M.R = args.Mpr; stewart.platform_M.H = args.Mph;
7 initializeCylindricalStruts: Define the inertia of cylindrical struts
This Matlab function is accessible here.
Function description
function [stewart] = initializeCylindricalStruts(stewart, args) % initializeCylindricalStruts - Define the mass and moment of inertia of cylindrical struts % % Syntax: [stewart] = initializeCylindricalStruts(args) % % Inputs: % - args - Structure with the following fields: % - Fsm [1x1] - Mass of the Fixed part of the struts [kg] % - Fsh [1x1] - Height of cylinder for the Fixed part of the struts [m] % - Fsr [1x1] - Radius of cylinder for the Fixed part of the struts [m] % - Msm [1x1] - Mass of the Mobile part of the struts [kg] % - Msh [1x1] - Height of cylinder for the Mobile part of the struts [m] % - Msr [1x1] - Radius of cylinder for the Mobile part of the struts [m] % % Outputs: % - stewart - updated Stewart structure with the added fields: % - struts_F [struct] - structure with the following fields: % - M [6x1] - Mass of the Fixed part of the struts [kg] % - I [3x3x6] - Moment of Inertia for the Fixed part of the struts [kg*m^2] % - H [6x1] - Height of cylinder for the Fixed part of the struts [m] % - R [6x1] - Radius of cylinder for the Fixed part of the struts [m] % - struts_M [struct] - structure with the following fields: % - M [6x1] - Mass of the Mobile part of the struts [kg] % - I [3x3x6] - Moment of Inertia for the Mobile part of the struts [kg*m^2] % - H [6x1] - Height of cylinder for the Mobile part of the struts [m] % - R [6x1] - Radius of cylinder for the Mobile part of the struts [m]
Optional Parameters
arguments
stewart
args.Fsm (1,1) double {mustBeNumeric, mustBePositive} = 0.1
args.Fsh (1,1) double {mustBeNumeric, mustBePositive} = 50e-3
args.Fsr (1,1) double {mustBeNumeric, mustBePositive} = 5e-3
args.Msm (1,1) double {mustBeNumeric, mustBePositive} = 0.1
args.Msh (1,1) double {mustBeNumeric, mustBePositive} = 50e-3
args.Msr (1,1) double {mustBeNumeric, mustBePositive} = 5e-3
end
Compute the properties of the cylindrical struts
Fsm = ones(6,1).*args.Fsm; Fsh = ones(6,1).*args.Fsh; Fsr = ones(6,1).*args.Fsr; Msm = ones(6,1).*args.Msm; Msh = ones(6,1).*args.Msh; Msr = ones(6,1).*args.Msr;
I_F = zeros(3, 3, 6); % Inertia of the "fixed" part of the strut
I_M = zeros(3, 3, 6); % Inertia of the "mobile" part of the strut
for i = 1:6
I_F(:,:,i) = diag([1/12 * Fsm(i) * (3*Fsr(i)^2 + Fsh(i)^2), ...
1/12 * Fsm(i) * (3*Fsr(i)^2 + Fsh(i)^2), ...
1/2 * Fsm(i) * Fsr(i)^2]);
I_M(:,:,i) = diag([1/12 * Msm(i) * (3*Msr(i)^2 + Msh(i)^2), ...
1/12 * Msm(i) * (3*Msr(i)^2 + Msh(i)^2), ...
1/2 * Msm(i) * Msr(i)^2]);
end
Populate the stewart structure
stewart.struts_M.type = 1; stewart.struts_M.I = I_M; stewart.struts_M.M = Msm; stewart.struts_M.R = Msr; stewart.struts_M.H = Msh;
stewart.struts_F.type = 1; stewart.struts_F.I = I_F; stewart.struts_F.M = Fsm; stewart.struts_F.R = Fsr; stewart.struts_F.H = Fsh;
8 initializeStrutDynamics: Add Stiffness and Damping properties of each strut
This Matlab function is accessible here.
Documentation

Figure 5: Example of a piezoelectric stach actuator (PI)
A simplistic model of such amplified actuator is shown in Figure 6 where:
- \(K\) represent the vertical stiffness of the actuator
- \(C\) represent the vertical damping of the actuator
- \(F\) represents the force applied by the actuator
- \(F_{m}\) represents the total measured force
- \(v_{m}\) represents the absolute velocity of the top part of the actuator
- \(d_{m}\) represents the total relative displacement of the actuator

Figure 6: Simple model of an Actuator
Function description
function [stewart] = initializeStrutDynamics(stewart, args) % initializeStrutDynamics - Add Stiffness and Damping properties of each strut % % Syntax: [stewart] = initializeStrutDynamics(args) % % Inputs: % - args - Structure with the following fields: % - K [6x1] - Stiffness of each strut [N/m] % - C [6x1] - Damping of each strut [N/(m/s)] % % Outputs: % - stewart - updated Stewart structure with the added fields: % - actuators.type = 1 % - actuators.K [6x1] - Stiffness of each strut [N/m] % - actuators.C [6x1] - Damping of each strut [N/(m/s)]
Optional Parameters
arguments
stewart
args.type char {mustBeMember(args.type,{'classical', 'amplified'})} = 'classical'
args.K (6,1) double {mustBeNumeric, mustBeNonnegative} = 20e6*ones(6,1)
args.C (6,1) double {mustBeNumeric, mustBeNonnegative} = 2e1*ones(6,1)
args.k1 (6,1) double {mustBeNumeric} = 1e6
args.ke (6,1) double {mustBeNumeric} = 5e6
args.ka (6,1) double {mustBeNumeric} = 60e6
args.c1 (6,1) double {mustBeNumeric} = 10
args.ce (6,1) double {mustBeNumeric} = 10
args.ca (6,1) double {mustBeNumeric} = 10
args.me (6,1) double {mustBeNumeric} = 0.05
args.ma (6,1) double {mustBeNumeric} = 0.05
end
Add Stiffness and Damping properties of each strut
if strcmp(args.type, 'classical')
stewart.actuators.type = 1;
elseif strcmp(args.type, 'amplified')
stewart.actuators.type = 2;
end
stewart.actuators.K = args.K;
stewart.actuators.C = args.C;
stewart.actuators.k1 = args.k1;
stewart.actuators.c1 = args.c1;
stewart.actuators.ka = args.ka;
stewart.actuators.ca = args.ca;
stewart.actuators.ke = args.ke;
stewart.actuators.ce = args.ce;
stewart.actuators.ma = args.ma;
stewart.actuators.me = args.me;
9 initializeAmplifiedStrutDynamics: Add Stiffness and Damping properties of each strut for an amplified piezoelectric actuator
This Matlab function is accessible here.
Documentation
An amplified piezoelectric actuator is shown in Figure 7.

Figure 7: Example of an Amplified piezoelectric actuator with an integrated displacement sensor (Cedrat Technologies)
A simplistic model of such amplified actuator is shown in Figure 8 where:
- \(K_{r}\) represent the vertical stiffness when the piezoelectric stack is removed
- \(K_{a}\) is the vertical stiffness contribution of the piezoelectric stack
- \(F_{i}\) represents the part of the piezoelectric stack that is used as a force actuator
- \(F_{m,i}\) represents the remaining part of the piezoelectric stack that is used as a force sensor
- \(v_{m,i}\) represents the absolute velocity of the top part of the actuator
- \(d_{m,i}\) represents the total relative displacement of the actuator
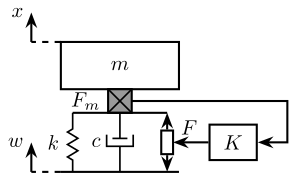
Figure 8: Model of an amplified actuator
Function description
function [stewart] = initializeAmplifiedStrutDynamics(stewart, args) % initializeAmplifiedStrutDynamics - Add Stiffness and Damping properties of each strut % % Syntax: [stewart] = initializeAmplifiedStrutDynamics(args) % % Inputs: % - args - Structure with the following fields: % - Ka [6x1] - Vertical stiffness contribution of the piezoelectric stack [N/m] % - Ca [6x1] - Vertical damping contribution of the piezoelectric stack [N/(m/s)] % - Kr [6x1] - Vertical (residual) stiffness when the piezoelectric stack is removed [N/m] % - Cr [6x1] - Vertical (residual) damping when the piezoelectric stack is removed [N/(m/s)] % % Outputs: % - stewart - updated Stewart structure with the added fields: % - actuators.type = 2 % - actuators.K [6x1] - Total Stiffness of each strut [N/m] % - actuators.C [6x1] - Total Damping of each strut [N/(m/s)] % - actuators.Ka [6x1] - Vertical stiffness contribution of the piezoelectric stack [N/m] % - actuators.Ca [6x1] - Vertical damping contribution of the piezoelectric stack [N/(m/s)] % - actuators.Kr [6x1] - Vertical stiffness when the piezoelectric stack is removed [N/m] % - actuators.Cr [6x1] - Vertical damping when the piezoelectric stack is removed [N/(m/s)]
Optional Parameters
arguments
stewart
args.Kr (6,1) double {mustBeNumeric, mustBeNonnegative} = 5e6*ones(6,1)
args.Cr (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e1*ones(6,1)
args.Ka (6,1) double {mustBeNumeric, mustBeNonnegative} = 15e6*ones(6,1)
args.Ca (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e1*ones(6,1)
end
Compute the total stiffness and damping
K = args.Ka + args.Kr; C = args.Ca + args.Cr;
Populate the stewart structure
stewart.actuators.type = 2; stewart.actuators.Ka = args.Ka; stewart.actuators.Ca = args.Ca; stewart.actuators.Kr = args.Kr; stewart.actuators.Cr = args.Cr; stewart.actuators.K = K; stewart.actuators.C = K;
10 initializeJointDynamics: Add Stiffness and Damping properties for spherical joints
This Matlab function is accessible here.
Function description
function [stewart] = initializeJointDynamics(stewart, args) % initializeJointDynamics - Add Stiffness and Damping properties for the spherical joints % % Syntax: [stewart] = initializeJointDynamics(args) % % Inputs: % - args - Structure with the following fields: % - type_F - 'universal', 'spherical', 'universal_p', 'spherical_p' % - type_M - 'universal', 'spherical', 'universal_p', 'spherical_p' % - Kf_M [6x1] - Bending (Rx, Ry) Stiffness for each top joints [(N.m)/rad] % - Kt_M [6x1] - Torsion (Rz) Stiffness for each top joints [(N.m)/rad] % - Cf_M [6x1] - Bending (Rx, Ry) Damping of each top joint [(N.m)/(rad/s)] % - Ct_M [6x1] - Torsion (Rz) Damping of each top joint [(N.m)/(rad/s)] % - Kz_M [6x1] - Translation (Tz) Stiffness for each top joints [N/m] % - Cz_M [6x1] - Translation (Tz) Damping of each top joint [N/m] % - Kf_F [6x1] - Bending (Rx, Ry) Stiffness for each bottom joints [(N.m)/rad] % - Kt_F [6x1] - Torsion (Rz) Stiffness for each bottom joints [(N.m)/rad] % - Cf_F [6x1] - Bending (Rx, Ry) Damping of each bottom joint [(N.m)/(rad/s)] % - Cf_F [6x1] - Torsion (Rz) Damping of each bottom joint [(N.m)/(rad/s)] % - Kz_F [6x1] - Translation (Tz) Stiffness for each bottom joints [N/m] % - Cz_F [6x1] - Translation (Tz) Damping of each bottom joint [N/m] % % Outputs: % - stewart - updated Stewart structure with the added fields: % - stewart.joints_F and stewart.joints_M: % - type - 1 (universal), 2 (spherical), 3 (universal perfect), 4 (spherical perfect) % - Kx, Ky, Kz [6x1] - Translation (Tx, Ty, Tz) Stiffness [N/m] % - Kf [6x1] - Flexion (Rx, Ry) Stiffness [(N.m)/rad] % - Kt [6x1] - Torsion (Rz) Stiffness [(N.m)/rad] % - Cx, Cy, Cz [6x1] - Translation (Rx, Ry) Damping [N/(m/s)] % - Cf [6x1] - Flexion (Rx, Ry) Damping [(N.m)/(rad/s)] % - Cb [6x1] - Torsion (Rz) Damping [(N.m)/(rad/s)]
Optional Parameters
arguments
stewart
args.type_F char {mustBeMember(args.type_F,{'universal', 'spherical', 'universal_p', 'spherical_p', 'universal_3dof'})} = 'universal'
args.type_M char {mustBeMember(args.type_M,{'universal', 'spherical', 'universal_p', 'spherical_p', 'spherical_3dof'})} = 'spherical'
args.Kf_M (6,1) double {mustBeNumeric, mustBeNonnegative} = 15*ones(6,1)
args.Cf_M (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e-4*ones(6,1)
args.Kt_M (6,1) double {mustBeNumeric, mustBeNonnegative} = 20*ones(6,1)
args.Ct_M (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e-3*ones(6,1)
args.Kz_M (6,1) double {mustBeNumeric, mustBeNonnegative} = 60e6*ones(6,1)
args.Cz_M (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e2*ones(6,1)
args.Kf_F (6,1) double {mustBeNumeric, mustBeNonnegative} = 15*ones(6,1)
args.Cf_F (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e-4*ones(6,1)
args.Kt_F (6,1) double {mustBeNumeric, mustBeNonnegative} = 20*ones(6,1)
args.Ct_F (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e-3*ones(6,1)
args.Kz_F (6,1) double {mustBeNumeric, mustBeNonnegative} = 60e6*ones(6,1)
args.Cz_F (6,1) double {mustBeNumeric, mustBeNonnegative} = 1e2*ones(6,1)
end
Add Actuator Type
switch args.type_F
case 'universal'
stewart.joints_F.type = 1;
case 'spherical'
stewart.joints_F.type = 2;
case 'universal_p'
stewart.joints_F.type = 3;
case 'spherical_p'
stewart.joints_F.type = 4;
case 'universal_3dof'
stewart.joints_F.type = 5;
end
switch args.type_M
case 'universal'
stewart.joints_M.type = 1;
case 'spherical'
stewart.joints_M.type = 2;
case 'universal_p'
stewart.joints_M.type = 3;
case 'spherical_p'
stewart.joints_M.type = 4;
case 'spherical_3dof'
stewart.joints_M.type = 6;
end
Add Stiffness and Damping in Translation of each strut
Translation Stiffness
stewart.joints_M.Kx = zeros(6,1); stewart.joints_M.Ky = zeros(6,1); stewart.joints_M.Kz = args.Kz_M; stewart.joints_F.Kx = zeros(6,1); stewart.joints_F.Ky = zeros(6,1); stewart.joints_F.Kz = args.Kz_F;
Translation Damping
stewart.joints_M.Cx = zeros(6,1); stewart.joints_M.Cy = zeros(6,1); stewart.joints_M.Cz = args.Cz_M; stewart.joints_F.Cx = zeros(6,1); stewart.joints_F.Cy = zeros(6,1); stewart.joints_F.Cz = args.Cz_F;
Add Stiffness and Damping in Rotation of each strut
Rotational Stiffness
stewart.joints_M.Kf = args.Kf_M; stewart.joints_M.Kt = args.Kf_M; stewart.joints_F.Kf = args.Kf_F; stewart.joints_F.Kt = args.Kf_F;
Rotational Damping
stewart.joints_M.Cf = args.Cf_M; stewart.joints_M.Ct = args.Cf_M; stewart.joints_F.Cf = args.Cf_F; stewart.joints_F.Ct = args.Cf_F;
11 initializeInertialSensor: Initialize the inertial sensor in each strut
This Matlab function is accessible here.
Geophone - Working Principle
From the schematic of the Z-axis geophone shown in Figure 9, we can write the transfer function from the support velocity \(\dot{w}\) to the relative velocity of the inertial mass \(\dot{d}\): \[ \frac{\dot{d}}{\dot{w}} = \frac{-\frac{s^2}{{\omega_0}^2}}{\frac{s^2}{{\omega_0}^2} + 2 \xi \frac{s}{\omega_0} + 1} \] with:
- \(\omega_0 = \sqrt{\frac{k}{m}}\)
- \(\xi = \frac{1}{2} \sqrt{\frac{m}{k}}\)

Figure 9: Schematic of a Z-Axis geophone
We see that at frequencies above \(\omega_0\): \[ \frac{\dot{d}}{\dot{w}} \approx -1 \]
And thus, the measurement of the relative velocity of the mass with respect to its support gives the absolute velocity of the support.
We generally want to have the smallest resonant frequency \(\omega_0\) to measure low frequency absolute velocity, however there is a trade-off between \(\omega_0\) and the mass of the inertial mass.
Accelerometer - Working Principle
From the schematic of the Z-axis accelerometer shown in Figure 10, we can write the transfer function from the support acceleration \(\ddot{w}\) to the relative position of the inertial mass \(d\): \[ \frac{d}{\ddot{w}} = \frac{-\frac{1}{{\omega_0}^2}}{\frac{s^2}{{\omega_0}^2} + 2 \xi \frac{s}{\omega_0} + 1} \] with:
- \(\omega_0 = \sqrt{\frac{k}{m}}\)
- \(\xi = \frac{1}{2} \sqrt{\frac{m}{k}}\)
Figure 10: Schematic of a Z-Axis geophone
We see that at frequencies below \(\omega_0\): \[ \frac{d}{\ddot{w}} \approx -\frac{1}{{\omega_0}^2} \]
And thus, the measurement of the relative displacement of the mass with respect to its support gives the absolute acceleration of the support.
Note that there is trade-off between:
- the highest measurable acceleration \(\omega_0\)
- the sensitivity of the accelerometer which is equal to \(-\frac{1}{{\omega_0}^2}\)
Function description
function [stewart] = initializeInertialSensor(stewart, args) % initializeInertialSensor - Initialize the inertial sensor in each strut % % Syntax: [stewart] = initializeInertialSensor(args) % % Inputs: % - args - Structure with the following fields: % - type - 'geophone', 'accelerometer', 'none' % - mass [1x1] - Weight of the inertial mass [kg] % - freq [1x1] - Cutoff frequency [Hz] % % Outputs: % - stewart - updated Stewart structure with the added fields: % - stewart.sensors.inertial % - type - 1 (geophone), 2 (accelerometer), 3 (none) % - K [1x1] - Stiffness [N/m] % - C [1x1] - Damping [N/(m/s)] % - M [1x1] - Inertial Mass [kg] % - G [1x1] - Gain
Optional Parameters
arguments
stewart
args.type char {mustBeMember(args.type,{'geophone', 'accelerometer', 'none'})} = 'none'
args.mass (1,1) double {mustBeNumeric, mustBeNonnegative} = 1e-2
args.freq (1,1) double {mustBeNumeric, mustBeNonnegative} = 1e3
end
Compute the properties of the sensor
sensor = struct();
switch args.type
case 'geophone'
sensor.type = 1;
sensor.M = args.mass;
sensor.K = sensor.M * (2*pi*args.freq)^2;
sensor.C = 2*sqrt(sensor.M * sensor.K);
case 'accelerometer'
sensor.type = 2;
sensor.M = args.mass;
sensor.K = sensor.M * (2*pi*args.freq)^2;
sensor.C = 2*sqrt(sensor.M * sensor.K);
sensor.G = -sensor.K/sensor.M;
case 'none'
sensor.type = 3;
end
Populate the stewart structure
stewart.sensors.inertial = sensor;
12 displayArchitecture: 3D plot of the Stewart platform architecture
This Matlab function is accessible here.
Function description
function [] = displayArchitecture(stewart, args)
% displayArchitecture - 3D plot of the Stewart platform architecture
%
% Syntax: [] = displayArchitecture(args)
%
% Inputs:
% - stewart
% - args - Structure with the following fields:
% - AP [3x1] - The wanted position of {B} with respect to {A}
% - ARB [3x3] - The rotation matrix that gives the wanted orientation of {B} with respect to {A}
% - ARB [3x3] - The rotation matrix that gives the wanted orientation of {B} with respect to {A}
% - F_color [color] - Color used for the Fixed elements
% - M_color [color] - Color used for the Mobile elements
% - L_color [color] - Color used for the Legs elements
% - frames [true/false] - Display the Frames
% - legs [true/false] - Display the Legs
% - joints [true/false] - Display the Joints
% - labels [true/false] - Display the Labels
% - platforms [true/false] - Display the Platforms
% - views ['all', 'xy', 'yz', 'xz', 'default'] -
%
% Outputs:
Optional Parameters
arguments
stewart
args.AP (3,1) double {mustBeNumeric} = zeros(3,1)
args.ARB (3,3) double {mustBeNumeric} = eye(3)
args.F_color = [0 0.4470 0.7410]
args.M_color = [0.8500 0.3250 0.0980]
args.L_color = [0 0 0]
args.frames logical {mustBeNumericOrLogical} = true
args.legs logical {mustBeNumericOrLogical} = true
args.joints logical {mustBeNumericOrLogical} = true
args.labels logical {mustBeNumericOrLogical} = true
args.platforms logical {mustBeNumericOrLogical} = true
args.views char {mustBeMember(args.views,{'all', 'xy', 'xz', 'yz', 'default'})} = 'default'
end
Check the stewart structure elements
assert(isfield(stewart.platform_F, 'FO_A'), 'stewart.platform_F should have attribute FO_A') FO_A = stewart.platform_F.FO_A; assert(isfield(stewart.platform_M, 'MO_B'), 'stewart.platform_M should have attribute MO_B') MO_B = stewart.platform_M.MO_B; assert(isfield(stewart.geometry, 'H'), 'stewart.geometry should have attribute H') H = stewart.geometry.H; assert(isfield(stewart.platform_F, 'Fa'), 'stewart.platform_F should have attribute Fa') Fa = stewart.platform_F.Fa; assert(isfield(stewart.platform_M, 'Mb'), 'stewart.platform_M should have attribute Mb') Mb = stewart.platform_M.Mb;
Figure Creation, Frames and Homogeneous transformations
The reference frame of the 3d plot corresponds to the frame \(\{F\}\).
if ~strcmp(args.views, 'all')
figure;
else
f = figure('visible', 'off');
end
hold on;
We first compute homogeneous matrices that will be useful to position elements on the figure where the reference frame is \(\{F\}\).
FTa = [eye(3), FO_A; ...
zeros(1,3), 1];
ATb = [args.ARB, args.AP; ...
zeros(1,3), 1];
BTm = [eye(3), -MO_B; ...
zeros(1,3), 1];
FTm = FTa*ATb*BTm;
Let’s define a parameter that define the length of the unit vectors used to display the frames.
d_unit_vector = H/4;
Let’s define a parameter used to position the labels with respect to the center of the element.
d_label = H/20;
Fixed Base elements
Let’s first plot the frame \(\{F\}\).
Ff = [0, 0, 0];
if args.frames
quiver3(Ff(1)*ones(1,3), Ff(2)*ones(1,3), Ff(3)*ones(1,3), ...
[d_unit_vector 0 0], [0 d_unit_vector 0], [0 0 d_unit_vector], '-', 'Color', args.F_color)
if args.labels
text(Ff(1) + d_label, ...
Ff(2) + d_label, ...
Ff(3) + d_label, '$\{F\}$', 'Color', args.F_color);
end
end
Now plot the frame \(\{A\}\) fixed to the Base.
if args.frames
quiver3(FO_A(1)*ones(1,3), FO_A(2)*ones(1,3), FO_A(3)*ones(1,3), ...
[d_unit_vector 0 0], [0 d_unit_vector 0], [0 0 d_unit_vector], '-', 'Color', args.F_color)
if args.labels
text(FO_A(1) + d_label, ...
FO_A(2) + d_label, ...
FO_A(3) + d_label, '$\{A\}$', 'Color', args.F_color);
end
end
Let’s then plot the circle corresponding to the shape of the Fixed base.
if args.platforms && stewart.platform_F.type == 1
theta = [0:0.01:2*pi+0.01]; % Angles [rad]
v = null([0; 0; 1]'); % Two vectors that are perpendicular to the circle normal
center = [0; 0; 0]; % Center of the circle
radius = stewart.platform_F.R; % Radius of the circle [m]
points = center*ones(1, length(theta)) + radius*(v(:,1)*cos(theta) + v(:,2)*sin(theta));
plot3(points(1,:), ...
points(2,:), ...
points(3,:), '-', 'Color', args.F_color);
end
Let’s now plot the position and labels of the Fixed Joints
if args.joints
scatter3(Fa(1,:), ...
Fa(2,:), ...
Fa(3,:), 'MarkerEdgeColor', args.F_color);
if args.labels
for i = 1:size(Fa,2)
text(Fa(1,i) + d_label, ...
Fa(2,i), ...
Fa(3,i), sprintf('$a_{%i}$', i), 'Color', args.F_color);
end
end
end
Mobile Platform elements
Plot the frame \(\{M\}\).
Fm = FTm*[0; 0; 0; 1]; % Get the position of frame {M} w.r.t. {F}
if args.frames
FM_uv = FTm*[d_unit_vector*eye(3); zeros(1,3)]; % Rotated Unit vectors
quiver3(Fm(1)*ones(1,3), Fm(2)*ones(1,3), Fm(3)*ones(1,3), ...
FM_uv(1,1:3), FM_uv(2,1:3), FM_uv(3,1:3), '-', 'Color', args.M_color)
if args.labels
text(Fm(1) + d_label, ...
Fm(2) + d_label, ...
Fm(3) + d_label, '$\{M\}$', 'Color', args.M_color);
end
end
Plot the frame \(\{B\}\).
FB = FO_A + args.AP;
if args.frames
FB_uv = FTm*[d_unit_vector*eye(3); zeros(1,3)]; % Rotated Unit vectors
quiver3(FB(1)*ones(1,3), FB(2)*ones(1,3), FB(3)*ones(1,3), ...
FB_uv(1,1:3), FB_uv(2,1:3), FB_uv(3,1:3), '-', 'Color', args.M_color)
if args.labels
text(FB(1) - d_label, ...
FB(2) + d_label, ...
FB(3) + d_label, '$\{B\}$', 'Color', args.M_color);
end
end
Let’s then plot the circle corresponding to the shape of the Mobile platform.
if args.platforms && stewart.platform_M.type == 1
theta = [0:0.01:2*pi+0.01]; % Angles [rad]
v = null((FTm(1:3,1:3)*[0;0;1])'); % Two vectors that are perpendicular to the circle normal
center = Fm(1:3); % Center of the circle
radius = stewart.platform_M.R; % Radius of the circle [m]
points = center*ones(1, length(theta)) + radius*(v(:,1)*cos(theta) + v(:,2)*sin(theta));
plot3(points(1,:), ...
points(2,:), ...
points(3,:), '-', 'Color', args.M_color);
end
Plot the position and labels of the rotation joints fixed to the mobile platform.
if args.joints
Fb = FTm*[Mb;ones(1,6)];
scatter3(Fb(1,:), ...
Fb(2,:), ...
Fb(3,:), 'MarkerEdgeColor', args.M_color);
if args.labels
for i = 1:size(Fb,2)
text(Fb(1,i) + d_label, ...
Fb(2,i), ...
Fb(3,i), sprintf('$b_{%i}$', i), 'Color', args.M_color);
end
end
end
Legs
Plot the legs connecting the joints of the fixed base to the joints of the mobile platform.
if args.legs
for i = 1:6
plot3([Fa(1,i), Fb(1,i)], ...
[Fa(2,i), Fb(2,i)], ...
[Fa(3,i), Fb(3,i)], '-', 'Color', args.L_color);
if args.labels
text((Fa(1,i)+Fb(1,i))/2 + d_label, ...
(Fa(2,i)+Fb(2,i))/2, ...
(Fa(3,i)+Fb(3,i))/2, sprintf('$%i$', i), 'Color', args.L_color);
end
end
end
12.1 Figure parameters
switch args.views
case 'default'
view([1 -0.6 0.4]);
case 'xy'
view([0 0 1]);
case 'xz'
view([0 -1 0]);
case 'yz'
view([1 0 0]);
end
axis equal;
axis off;
12.2 Subplots
if strcmp(args.views, 'all')
hAx = findobj('type', 'axes');
figure;
s1 = subplot(2,2,1);
copyobj(get(hAx(1), 'Children'), s1);
view([0 0 1]);
axis equal;
axis off;
title('Top')
s2 = subplot(2,2,2);
copyobj(get(hAx(1), 'Children'), s2);
view([1 -0.6 0.4]);
axis equal;
axis off;
s3 = subplot(2,2,3);
copyobj(get(hAx(1), 'Children'), s3);
view([1 0 0]);
axis equal;
axis off;
title('Front')
s4 = subplot(2,2,4);
copyobj(get(hAx(1), 'Children'), s4);
view([0 -1 0]);
axis equal;
axis off;
title('Side')
close(f);
end
13 describeStewartPlatform: Display some text describing the current defined Stewart Platform
This Matlab function is accessible here.
Function description
function [] = describeStewartPlatform(stewart) % describeStewartPlatform - Display some text describing the current defined Stewart Platform % % Syntax: [] = describeStewartPlatform(args) % % Inputs: % - stewart % % Outputs:
Optional Parameters
arguments
stewart
end
13.1 Geometry
fprintf('GEOMETRY:\n')
fprintf('- The height between the fixed based and the top platform is %.3g [mm].\n', 1e3*stewart.geometry.H)
if stewart.platform_M.MO_B(3) > 0
fprintf('- Frame {A} is located %.3g [mm] above the top platform.\n', 1e3*stewart.platform_M.MO_B(3))
else
fprintf('- Frame {A} is located %.3g [mm] below the top platform.\n', - 1e3*stewart.platform_M.MO_B(3))
end
fprintf('- The initial length of the struts are:\n')
fprintf('\t %.3g, %.3g, %.3g, %.3g, %.3g, %.3g [mm]\n', 1e3*stewart.geometry.l)
fprintf('\n')
13.2 Actuators
fprintf('ACTUATORS:\n')
if stewart.actuators.type == 1
fprintf('- The actuators are classical.\n')
fprintf('- The Stiffness and Damping of each actuators is:\n')
fprintf('\t k = %.0e [N/m] \t c = %.0e [N/(m/s)]\n', stewart.actuators.K(1), stewart.actuators.C(1))
elseif stewart.actuators.type == 2
fprintf('- The actuators are mechanicaly amplified.\n')
fprintf('- The vertical stiffness and damping contribution of the piezoelectric stack is:\n')
fprintf('\t ka = %.0e [N/m] \t ca = %.0e [N/(m/s)]\n', stewart.actuators.Ka(1), stewart.actuators.Ca(1))
fprintf('- Vertical stiffness when the piezoelectric stack is removed is:\n')
fprintf('\t kr = %.0e [N/m] \t cr = %.0e [N/(m/s)]\n', stewart.actuators.Kr(1), stewart.actuators.Cr(1))
end
fprintf('\n')
13.3 Joints
fprintf('JOINTS:\n')
Type of the joints on the fixed base.
switch stewart.joints_F.type
case 1
fprintf('- The joints on the fixed based are universal joints\n')
case 2
fprintf('- The joints on the fixed based are spherical joints\n')
case 3
fprintf('- The joints on the fixed based are perfect universal joints\n')
case 4
fprintf('- The joints on the fixed based are perfect spherical joints\n')
end
Type of the joints on the mobile platform.
switch stewart.joints_M.type
case 1
fprintf('- The joints on the mobile based are universal joints\n')
case 2
fprintf('- The joints on the mobile based are spherical joints\n')
case 3
fprintf('- The joints on the mobile based are perfect universal joints\n')
case 4
fprintf('- The joints on the mobile based are perfect spherical joints\n')
end
Position of the fixed joints
fprintf('- The position of the joints on the fixed based with respect to {F} are (in [mm]):\n')
fprintf('\t % .3g \t % .3g \t % .3g\n', 1e3*stewart.platform_F.Fa)
Position of the mobile joints
fprintf('- The position of the joints on the mobile based with respect to {M} are (in [mm]):\n')
fprintf('\t % .3g \t % .3g \t % .3g\n', 1e3*stewart.platform_M.Mb)
fprintf('\n')
13.4 Kinematics
fprintf('KINEMATICS:\n')
if isfield(stewart.kinematics, 'K')
fprintf('- The Stiffness matrix K is (in [N/m]):\n')
fprintf('\t % .0e \t % .0e \t % .0e \t % .0e \t % .0e \t % .0e\n', stewart.kinematics.K)
end
if isfield(stewart.kinematics, 'C')
fprintf('- The Damping matrix C is (in [m/N]):\n')
fprintf('\t % .0e \t % .0e \t % .0e \t % .0e \t % .0e \t % .0e\n', stewart.kinematics.C)
end
14 generateCubicConfiguration: Generate a Cubic Configuration
This Matlab function is accessible here.
Function description
function [stewart] = generateCubicConfiguration(stewart, args)
% generateCubicConfiguration - Generate a Cubic Configuration
%
% Syntax: [stewart] = generateCubicConfiguration(stewart, args)
%
% Inputs:
% - stewart - A structure with the following fields
% - geometry.H [1x1] - Total height of the platform [m]
% - args - Can have the following fields:
% - Hc [1x1] - Height of the "useful" part of the cube [m]
% - FOc [1x1] - Height of the center of the cube with respect to {F} [m]
% - FHa [1x1] - Height of the plane joining the points ai with respect to the frame {F} [m]
% - MHb [1x1] - Height of the plane joining the points bi with respect to the frame {M} [m]
%
% Outputs:
% - stewart - updated Stewart structure with the added fields:
% - platform_F.Fa [3x6] - Its i'th column is the position vector of joint ai with respect to {F}
% - platform_M.Mb [3x6] - Its i'th column is the position vector of joint bi with respect to {M}
Documentation

Figure 11: Cubic Configuration
Optional Parameters
arguments
stewart
args.Hc (1,1) double {mustBeNumeric, mustBePositive} = 60e-3
args.FOc (1,1) double {mustBeNumeric} = 50e-3
args.FHa (1,1) double {mustBeNumeric, mustBeNonnegative} = 15e-3
args.MHb (1,1) double {mustBeNumeric, mustBeNonnegative} = 15e-3
end
Check the stewart structure elements
assert(isfield(stewart.geometry, 'H'), 'stewart.geometry should have attribute H') H = stewart.geometry.H;
Position of the Cube
We define the useful points of the cube with respect to the Cube’s center. \({}^{C}C\) are the 6 vertices of the cubes expressed in a frame {C} which is located at the center of the cube and aligned with {F} and {M}.
sx = [ 2; -1; -1]; sy = [ 0; 1; -1]; sz = [ 1; 1; 1]; R = [sx, sy, sz]./vecnorm([sx, sy, sz]); L = args.Hc*sqrt(3); Cc = R'*[[0;0;L],[L;0;L],[L;0;0],[L;L;0],[0;L;0],[0;L;L]] - [0;0;1.5*args.Hc]; CCf = [Cc(:,1), Cc(:,3), Cc(:,3), Cc(:,5), Cc(:,5), Cc(:,1)]; % CCf(:,i) corresponds to the bottom cube's vertice corresponding to the i'th leg CCm = [Cc(:,2), Cc(:,2), Cc(:,4), Cc(:,4), Cc(:,6), Cc(:,6)]; % CCm(:,i) corresponds to the top cube's vertice corresponding to the i'th leg
Compute the pose
We can compute the vector of each leg \({}^{C}\hat{\bm{s}}_{i}\) (unit vector from \({}^{C}C_{f}\) to \({}^{C}C_{m}\)).
CSi = (CCm - CCf)./vecnorm(CCm - CCf);
We now which to compute the position of the joints \(a_{i}\) and \(b_{i}\).
Fa = CCf + [0; 0; args.FOc] + ((args.FHa-(args.FOc-args.Hc/2))./CSi(3,:)).*CSi; Mb = CCf + [0; 0; args.FOc-H] + ((H-args.MHb-(args.FOc-args.Hc/2))./CSi(3,:)).*CSi;
Populate the stewart structure
stewart.platform_F.Fa = Fa; stewart.platform_M.Mb = Mb;
15 computeJacobian: Compute the Jacobian Matrix
This Matlab function is accessible here.
Function description
function [stewart] = computeJacobian(stewart)
% computeJacobian -
%
% Syntax: [stewart] = computeJacobian(stewart)
%
% Inputs:
% - stewart - With at least the following fields:
% - geometry.As [3x6] - The 6 unit vectors for each strut expressed in {A}
% - geometry.Ab [3x6] - The 6 position of the joints bi expressed in {A}
% - actuators.K [6x1] - Total stiffness of the actuators
%
% Outputs:
% - stewart - With the 3 added field:
% - kinematics.J [6x6] - The Jacobian Matrix
% - kinematics.K [6x6] - The Stiffness Matrix
% - kinematics.C [6x6] - The Compliance Matrix
Check the stewart structure elements
assert(isfield(stewart.geometry, 'As'), 'stewart.geometry should have attribute As') As = stewart.geometry.As; assert(isfield(stewart.geometry, 'Ab'), 'stewart.geometry should have attribute Ab') Ab = stewart.geometry.Ab; assert(isfield(stewart.actuators, 'K'), 'stewart.actuators should have attribute K') Ki = stewart.actuators.K;
Compute Jacobian Matrix
J = [As' , cross(Ab, As)'];
Compute Stiffness Matrix
K = J'*diag(Ki)*J;
Compute Compliance Matrix
C = inv(K);
Populate the stewart structure
stewart.kinematics.J = J; stewart.kinematics.K = K; stewart.kinematics.C = C;
16 inverseKinematics: Compute Inverse Kinematics
This Matlab function is accessible here.
Theory
For inverse kinematic analysis, it is assumed that the position \({}^A\bm{P}\) and orientation of the moving platform \({}^A\bm{R}_B\) are given and the problem is to obtain the joint variables, namely, \(\bm{L} = [l_1, l_2, \dots, l_6]^T\).
From the geometry of the manipulator, the loop closure for each limb, \(i = 1, 2, \dots, 6\) can be written as
\begin{align*} l_i {}^A\hat{\bm{s}}_i &= {}^A\bm{A} + {}^A\bm{b}_i - {}^A\bm{a}_i \\ &= {}^A\bm{A} + {}^A\bm{R}_b {}^B\bm{b}_i - {}^A\bm{a}_i \end{align*}To obtain the length of each actuator and eliminate \(\hat{\bm{s}}_i\), it is sufficient to dot multiply each side by itself:
\begin{equation} l_i^2 \left[ {}^A\hat{\bm{s}}_i^T {}^A\hat{\bm{s}}_i \right] = \left[ {}^A\bm{P} + {}^A\bm{R}_B {}^B\bm{b}_i - {}^A\bm{a}_i \right]^T \left[ {}^A\bm{P} + {}^A\bm{R}_B {}^B\bm{b}_i - {}^A\bm{a}_i \right] \end{equation}Hence, for \(i = 1, 2, \dots, 6\), each limb length can be uniquely determined by:
\begin{equation} l_i = \sqrt{{}^A\bm{P}^T {}^A\bm{P} + {}^B\bm{b}_i^T {}^B\bm{b}_i + {}^A\bm{a}_i^T {}^A\bm{a}_i - 2 {}^A\bm{P}^T {}^A\bm{a}_i + 2 {}^A\bm{P}^T \left[{}^A\bm{R}_B {}^B\bm{b}_i\right] - 2 \left[{}^A\bm{R}_B {}^B\bm{b}_i\right]^T {}^A\bm{a}_i} \end{equation}If the position and orientation of the moving platform lie in the feasible workspace of the manipulator, one unique solution to the limb length is determined by the above equation. Otherwise, when the limbs’ lengths derived yield complex numbers, then the position or orientation of the moving platform is not reachable.
Function description
function [Li, dLi] = inverseKinematics(stewart, args)
% inverseKinematics - Compute the needed length of each strut to have the wanted position and orientation of {B} with respect to {A}
%
% Syntax: [stewart] = inverseKinematics(stewart)
%
% Inputs:
% - stewart - A structure with the following fields
% - geometry.Aa [3x6] - The positions ai expressed in {A}
% - geometry.Bb [3x6] - The positions bi expressed in {B}
% - geometry.l [6x1] - Length of each strut
% - args - Can have the following fields:
% - AP [3x1] - The wanted position of {B} with respect to {A}
% - ARB [3x3] - The rotation matrix that gives the wanted orientation of {B} with respect to {A}
%
% Outputs:
% - Li [6x1] - The 6 needed length of the struts in [m] to have the wanted pose of {B} w.r.t. {A}
% - dLi [6x1] - The 6 needed displacement of the struts from the initial position in [m] to have the wanted pose of {B} w.r.t. {A}
Optional Parameters
arguments
stewart
args.AP (3,1) double {mustBeNumeric} = zeros(3,1)
args.ARB (3,3) double {mustBeNumeric} = eye(3)
end
Check the stewart structure elements
assert(isfield(stewart.geometry, 'Aa'), 'stewart.geometry should have attribute Aa') Aa = stewart.geometry.Aa; assert(isfield(stewart.geometry, 'Bb'), 'stewart.geometry should have attribute Bb') Bb = stewart.geometry.Bb; assert(isfield(stewart.geometry, 'l'), 'stewart.geometry should have attribute l') l = stewart.geometry.l;
Compute
Li = sqrt(args.AP'*args.AP + diag(Bb'*Bb) + diag(Aa'*Aa) - (2*args.AP'*Aa)' + (2*args.AP'*(args.ARB*Bb))' - diag(2*(args.ARB*Bb)'*Aa));
dLi = Li-l;
17 forwardKinematicsApprox: Compute the Approximate Forward Kinematics
This Matlab function is accessible here.
Function description
function [P, R] = forwardKinematicsApprox(stewart, args)
% forwardKinematicsApprox - Computed the approximate pose of {B} with respect to {A} from the length of each strut and using
% the Jacobian Matrix
%
% Syntax: [P, R] = forwardKinematicsApprox(stewart, args)
%
% Inputs:
% - stewart - A structure with the following fields
% - kinematics.J [6x6] - The Jacobian Matrix
% - args - Can have the following fields:
% - dL [6x1] - Displacement of each strut [m]
%
% Outputs:
% - P [3x1] - The estimated position of {B} with respect to {A}
% - R [3x3] - The estimated rotation matrix that gives the orientation of {B} with respect to {A}
Optional Parameters
arguments
stewart
args.dL (6,1) double {mustBeNumeric} = zeros(6,1)
end
Check the stewart structure elements
assert(isfield(stewart.kinematics, 'J'), 'stewart.kinematics should have attribute J') J = stewart.kinematics.J;
Computation
From a small displacement of each strut \(d\bm{\mathcal{L}}\), we can compute the position and orientation of {B} with respect to {A} using the following formula: \[ d \bm{\mathcal{X}} = \bm{J}^{-1} d\bm{\mathcal{L}} \]
X = J\args.dL;
The position vector corresponds to the first 3 elements.
P = X(1:3);
The next 3 elements are the orientation of {B} with respect to {A} expressed using the screw axis.
theta = norm(X(4:6)); s = X(4:6)/theta;
We then compute the corresponding rotation matrix.
R = [s(1)^2*(1-cos(theta)) + cos(theta) , s(1)*s(2)*(1-cos(theta)) - s(3)*sin(theta), s(1)*s(3)*(1-cos(theta)) + s(2)*sin(theta);
s(2)*s(1)*(1-cos(theta)) + s(3)*sin(theta), s(2)^2*(1-cos(theta)) + cos(theta), s(2)*s(3)*(1-cos(theta)) - s(1)*sin(theta);
s(3)*s(1)*(1-cos(theta)) - s(2)*sin(theta), s(3)*s(2)*(1-cos(theta)) + s(1)*sin(theta), s(3)^2*(1-cos(theta)) + cos(theta)];