Noise Budgeting
Table of Contents
1 Maximum Noise of the Relative Motion Sensors
1.1 Initialization
open('nass_model.slx');
initializeGround();
initializeGranite();
initializeTy();
initializeRy();
initializeRz();
initializeMicroHexapod();
initializeAxisc();
initializeMirror();
initializeSimscapeConfiguration();
initializeDisturbances('enable', false);
initializeLoggingConfiguration('log', 'none');
initializeController('type', 'hac-dvf');
We set the stiffness of the payload fixation:
Kp = 1e8; % [N/m]
initializeNanoHexapod('k', 1e5, 'c', 2e2);
Ms = 50;
initializeSample('mass', Ms, 'freq', sqrt(Kp/Ms)/2/pi*ones(6,1));
initializeReferences('Rz_type', 'rotating-not-filtered', 'Rz_period', Ms);
1.2 Control System
Kdvf = 5e3*s/(1+s/2/pi/1e3)*eye(6);
h = 2.0;
Kl = 2e7 * eye(6) * ...
1/h*(s/(2*pi*100/h) + 1)/(s/(2*pi*100*h) + 1) * ...
1/h*(s/(2*pi*200/h) + 1)/(s/(2*pi*200*h) + 1) * ...
(s/2/pi/10 + 1)/(s/2/pi/10) * ...
1/(1 + s/2/pi/300);
load('mat/stages.mat', 'nano_hexapod');
K = Kl*nano_hexapod.kinematics.J*diag([1, 1, 1, 1, 1, 0]);
%% Run the linearization
G = linearize(mdl, io);
G.InputName = {'ndL1', 'ndL2', 'ndL3', 'ndL4', 'ndL5', 'ndL6'};
G.OutputName = {'Ex', 'Ey', 'Ez', 'Erx', 'Ery', 'Erz'};
1.3 Maximum induced vibration’s ASD
Required maximum induced ASD of the sample’s vibration due to the relative motion sensor noise. \[ \bm{\Gamma}_x(\omega) = \begin{bmatrix} \Gamma_x(\omega) & \Gamma_y(\omega) & \Gamma_{R_x}(\omega) & \Gamma_{R_y}(\omega) \end{bmatrix} \]
Gamma_x = [(1e-9)/(1 + s/2/pi/100); % Dx
(1e-9)/(1 + s/2/pi/100); % Dy
(1e-9)/(1 + s/2/pi/100); % Dz
(2e-8)/(1 + s/2/pi/100); % Rx
(2e-8)/(1 + s/2/pi/100)]; % Ry
freqs = logspace(0, 3, 1000);
Corresponding RMS value in [nm rms, nrad rms]
1e9*sqrt(trapz(freqs, (abs(squeeze(freqresp(Gamma_x, freqs, 'Hz')))').^2))
| Specifications | |
|---|---|
| Dx [nm] | 12.1 |
| Dy [nm] | 12.1 |
| Dz [nm] | 12.1 |
| Rx [nrad] | 241.8 |
| Ry [nrad] | 241.8 |
1.4 Computation of the maximum relative motion sensor noise
Let’s note \(G\) the transfer function from the 6 sensor noise \(n\) to the 6dof pose error \(x\). We have: \[ x_i = \sum_{j=1}^6 G_{ij}(s) n_j, \quad i = 1 \dots 5 \] In terms of ASD: \[ \Gamma_{x_i}(\omega) = \sum_{j=1}^6 |G_{ij}(j\omega)|^2 \Gamma_{n_j}(\omega), \quad i = 1 \dots 5 \]
Let’s suppose that the ASD of all the sensor noise are equal: \[ \Gamma_{n_j} = \Gamma_{n}, \quad j = 1 \dots 6 \]
We then have an upper bound of the sensor noise for each of the considered motion errors: \[ \Gamma_{n_i, \text{max}}(\omega) = \frac{\Gamma_{n_i}(\omega)}{\sum_{j=1}^6 |G_{ij}(j\omega)|^2}, \quad i = 1 \dots 5 \]
Gamma_ndL = zeros(5, length(freqs)); for in = 1:5 Gamma_ndL(in, :) = abs(squeeze(freqresp(Gamma_x(in), freqs, 'Hz')))./sqrt(sum(abs(squeeze(freqresp(G(in, :), freqs, 'Hz'))).^2))'; end
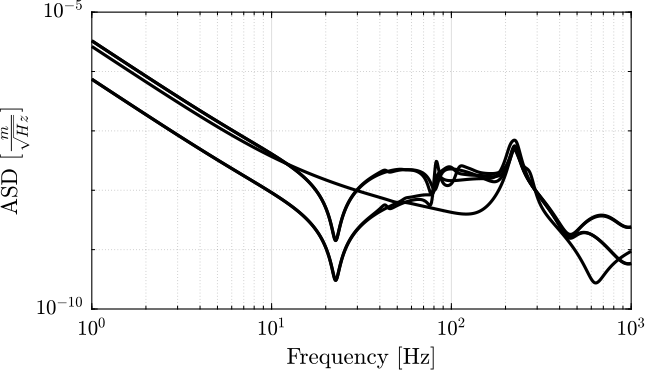
Figure 1: Maximum estimated ASD of the relative motion sensor noise
If the noise ASD of the relative motion sensor is bellow the maximum specified ASD for all the considered motion: \[ \Gamma_n < \Gamma_{n_i, \text{max}}, \quad i = 1 \dots 5 \] Then, the motion error due to sensor noise should be bellow the one specified.
Gamma_ndL_max = min(Gamma_ndL(1:5, :));
Let’s take a sensor with a white noise up to 1kHz that is bellow the specified one:
Gamma_ndL_ex = abs(squeeze(freqresp(min(Gamma_ndL_max)/(1 + s/2/pi/1e3), freqs, 'Hz')));
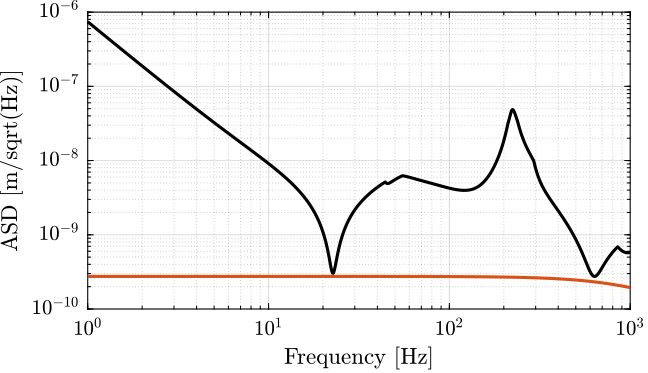
Figure 2: Requirement maximum ASD of the sensor noise + example of a sensor validating the requirements
The corresponding RMS value of the sensor noise taken as an example is [nm RMS]:
1e9*sqrt(trapz(freqs, Gamma_ndL_max.^2))
519.29
1.5 Verification of the induced motion error
Verify that by taking the sensor noise, we have to wanted displacement error From the sensor noise PSD \(\Gamma_n(\omega)\), we can estimate the obtained displacement PSD \(\Gamma_x(\omega)\): \[ \Gamma_{x,i}(\omega) = \sqrt{ \sum_{j=1}^{6} |G_{ij}|^2(j\omega) \Gamma_{n,j}^2(\omega) }, \quad i = 1 \dots 5 \]
Gamma_xest = zeros(5, length(freqs));
for in = 1:5
Gamma_xest(in, :) = sqrt(sum(abs(squeeze(freqresp(G(in, :), freqs, 'Hz'))).^2.*Gamma_ndL_max.^2));
end
| Results | Specifications | |
|---|---|---|
| Dx [nm] | 8.9 | 12.1 |
| Dy [nm] | 9.3 | 12.1 |
| Dz [nm] | 10.2 | 12.1 |
| Rx [nrad] | 110.2 | 241.8 |
| Ry [nrad] | 107.8 | 241.8 |