Force Control applied on the Simscape Model
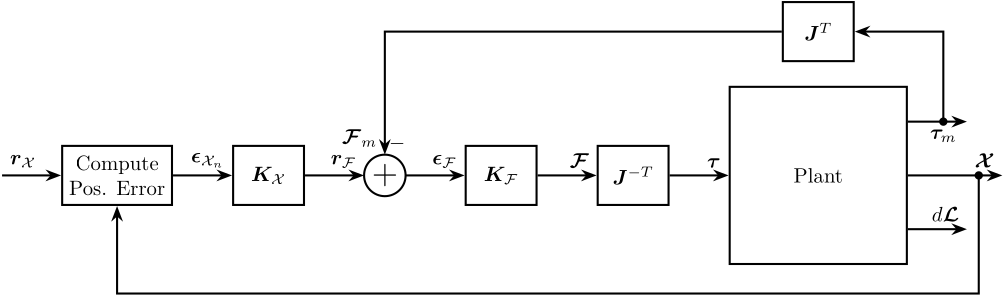
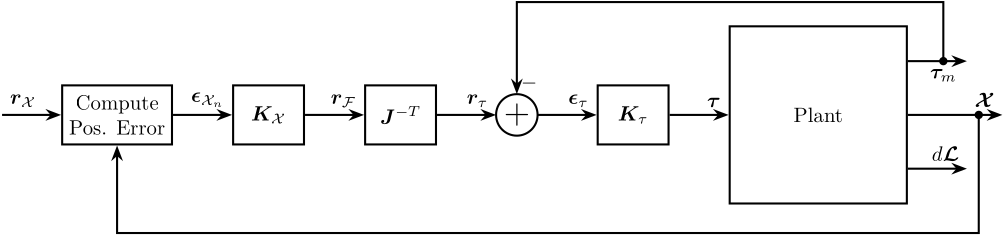
Cascade Control where the inner loop goal is to control the total wrench (forces and torques) applied to the upper part of the nano-hexapod.
The force will induce an acceleration of the upper part, thus we can consider the new input \(\bm{r}_\mathcal{F}\) as an acceleration input.
Ideas:
- This can be used as feedforward: we now the wanted 6dof reference path for the sample, thus we can compute the required acceleration and thus the required force. To do so, we need information on the inertia of the sample.