Equipment
Table of Contents
1 Sensors
1.1 Accelerometers
1.1.1 Wireless Accelerometers
1.1.2 Suppliers
1.3 Force Sensors
1.4 Strain Gauge
1.6 Bibliography
2 Actuators
2.1 Piezoelectric
2.2 Voice Coil
2.3 Shaker
3 Measurement System / Acquisition System
3.1 Modal Analysis
4 Control System
Dspace, Speedgoat
5 Positioning Stages
5.1 Hexapods
5.2 Translation/Rotation Stage
6 Amplifiers
6.1 Current Amplifiers
6.2 Voltage Amplifiers
7 ESRF Equipment
7.1 Geophones
7.1.1 L-28LB

Figure 1: Picture of the L-28LB Geophone
| Natural Frequency [Hz] | 4.5 |
| Weight [g] | 140 |
| Sensitivity [V/(m/s)] | 31.3 |
We define the parameters of the geophone and we plot its bode plot (figure 2).
w0 = 4.5*2*pi; % [rad/s] ksi = 0.38; G0 = 31.3; % [V/(m/s)] G = G0*(s/w0)^2/((s/w0)^2 + 2*ksi*(s/w0) + 1);
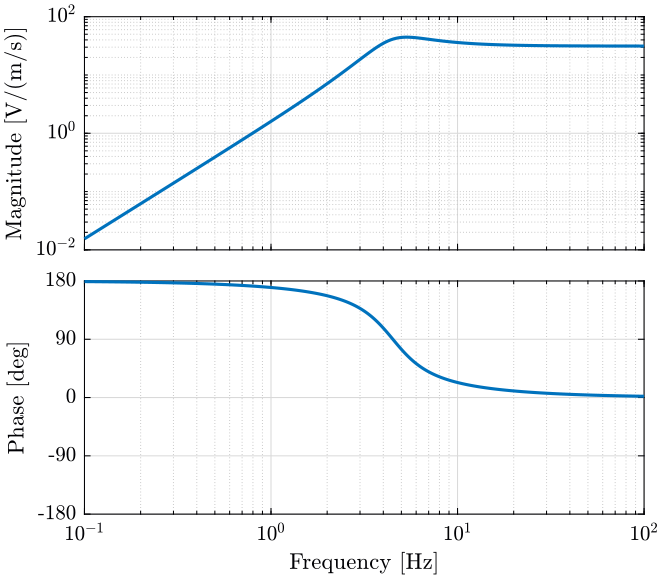
Figure 2: Bode plot of the L-28LB Geophone
7.1.2 L-4C

Figure 3: Picture of the L-4C Geophone
| Natural Frequency [Hz] | 1 |
| Weight [g] | 2150 |
| Sensitivity [V/(m/s)] | 276.8 |
The transfer function from the velocity and the measured voltage is defined below.
Its bode plot is shown on figure 4.
w0 = 2*pi; % [rad/s] ksi = 0.28; G0 = 276.8; % [V/(m/s)] G = G0*(s/w0)^2/((s/w0)^2 + 2*ksi*(s/w0) + 1);
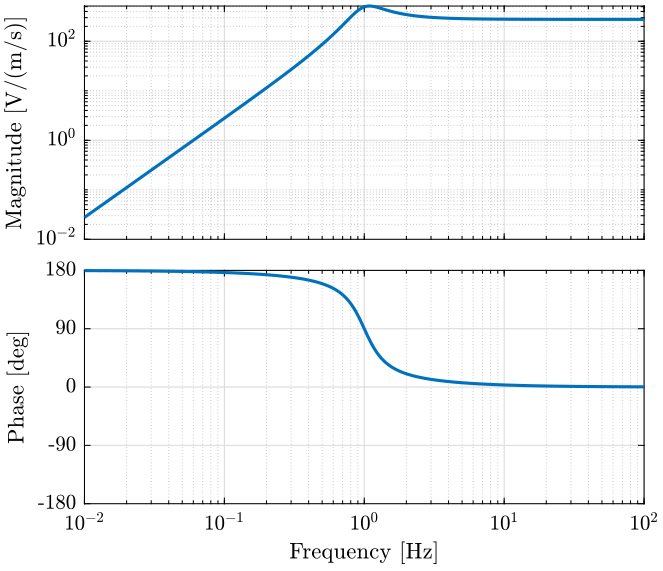
Figure 4: Bode plot of the L4C Geophone
7.2 Accelerometers
7.2.1 Pieozoelectric acc. 356b18 - 3 axis

Figure 5: Pieozoelectric acc. 356b18 - 3 axis
| Sensitivity | 0.102 \(V/(m/s^2)\) |
| Measurement Range | 4.9 \(m/s^2\) pk |
| Frequency Range | 0.5 to 3000 Hz |
| resonant frequency | > 20000 hz |
| broadband resolution | 0.0005 \(m/s^2\) rms |
7.2.2 Ceramic acc. 393B05 - 1 axis

Figure 6: Ceramic acc. 393B05 - 1 axis
| Sensitivity (±10 %) | 1.02 \(V/(m/s^2)\) |
| Measurement Range | 4.9 \(m/s^2\) pk |
| Frequency Range (±5 %) | 0.7 to 450 Hz |
| resonant frequency | > 2500 hz |
| broadband resolution | 0.00004 \(m/s^2\) rms |