Effect on the control system of each stages on the vibration of the station
Table of Contents
For all the measurements shown here:
- geophones used are L22 with a resonance frequency of 1Hz
- the signals are amplified with voltage amplifiers with a gain of 60dB
- the voltage amplifiers include a low pass filter with a cut-off frequency at 1kHz
1 Effect of all the control systems on the Sample vibrations
All the files (data and Matlab scripts) are accessible here.
1.1 Experimental Setup
We here measure the signals of two geophones:
- One is located on top of the Sample platform
- One is located on the marble
The signal from the top geophone does not go trought the slip-ring.
First, all the control systems are turned ON, then, they are turned one by one. Each measurement are done during 50s.
| Ty | Ry | Slip Ring | Spindle | Hexapod | Meas. file |
|---|---|---|---|---|---|
| ON | ON | ON | ON | ON | meas_003.mat |
| OFF | ON | ON | ON | ON | meas_004.mat |
| OFF | OFF | ON | ON | ON | meas_005.mat |
| OFF | OFF | OFF | ON | ON | meas_006.mat |
| OFF | OFF | OFF | OFF | ON | meas_007.mat |
| OFF | OFF | OFF | OFF | OFF | meas_008.mat |
Each of the mat file contains one array data with 3 columns:
| Column number | Description |
|---|---|
| 1 | Geophone - Marble |
| 2 | Geophone - Sample |
| 3 | Time |
1.2 Load data
We load the data of the z axis of two geophones.
d3 = load('mat/data_003.mat', 'data'); d3 = d3.data; d4 = load('mat/data_004.mat', 'data'); d4 = d4.data; d5 = load('mat/data_005.mat', 'data'); d5 = d5.data; d6 = load('mat/data_006.mat', 'data'); d6 = d6.data; d7 = load('mat/data_007.mat', 'data'); d7 = d7.data; d8 = load('mat/data_008.mat', 'data'); d8 = d8.data;
1.3 Analysis - Time Domain
First, we can look at the time domain data and compare all the measurements:
- comparison for the geophone at the sample location (figure 1)
- comparison for the geophone on the granite (figure 2)
figure; hold on; plot(d3(:, 3), d3(:, 2), 'DisplayName', 'All ON'); plot(d4(:, 3), d4(:, 2), 'DisplayName', 'Ty OFF'); plot(d5(:, 3), d5(:, 2), 'DisplayName', 'Ry OFF'); plot(d6(:, 3), d6(:, 2), 'DisplayName', 'S-R OFF'); plot(d7(:, 3), d7(:, 2), 'DisplayName', 'Rz OFF'); plot(d8(:, 3), d8(:, 2), 'DisplayName', 'Hexa OFF'); hold off; xlabel('Time [s]'); ylabel('Voltage [V]'); xlim([0, 50]); legend('Location', 'bestoutside');
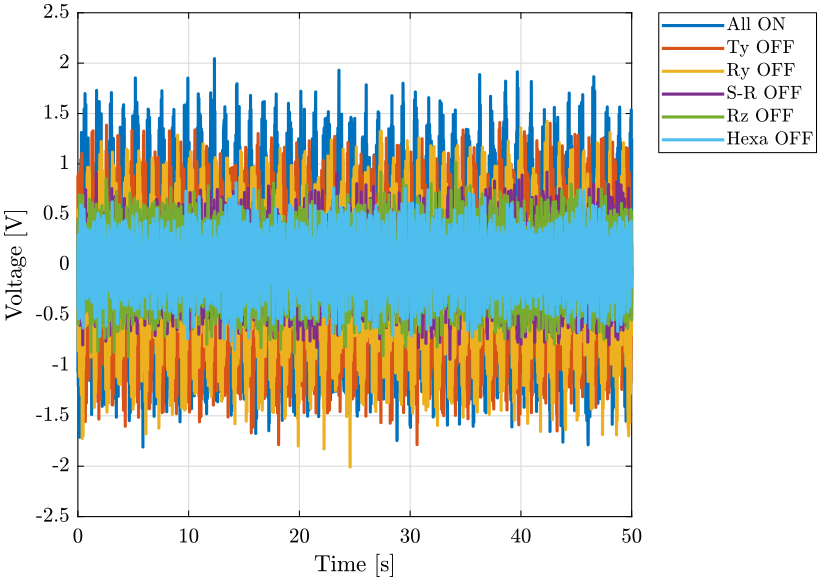
Figure 1: Comparison of the time domain data when turning off the control system of the stages - Geophone at the sample location
figure; hold on; plot(d3(:, 3), d3(:, 1), 'DisplayName', 'All ON'); plot(d4(:, 3), d4(:, 1), 'DisplayName', 'Ty OFF'); plot(d5(:, 3), d5(:, 1), 'DisplayName', 'Ry OFF'); plot(d6(:, 3), d6(:, 1), 'DisplayName', 'S-R OFF'); plot(d7(:, 3), d7(:, 1), 'DisplayName', 'Rz OFF'); plot(d8(:, 3), d8(:, 1), 'DisplayName', 'Hexa OFF'); hold off; xlabel('Time [s]'); ylabel('Voltage [V]'); xlim([0, 50]); legend('Location', 'bestoutside');
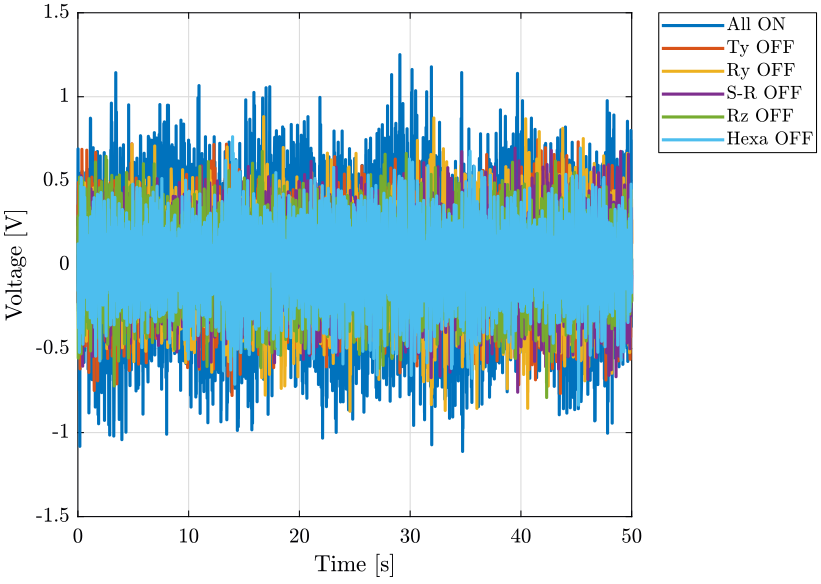
Figure 2: Comparison of the time domain data when turning off the control system of the stages - Geophone on the marble
1.4 Analysis - Frequency Domain
dt = d3(2, 3) - d3(1, 3); Fs = 1/dt; win = hanning(ceil(10*Fs));
1.4.1 Vibrations at the sample location
First, we compute the Power Spectral Density of the signals coming from the Geophone located at the sample location.
[px3, f] = pwelch(d3(:, 2), win, [], [], Fs); [px4, ~] = pwelch(d4(:, 2), win, [], [], Fs); [px5, ~] = pwelch(d5(:, 2), win, [], [], Fs); [px6, ~] = pwelch(d6(:, 2), win, [], [], Fs); [px7, ~] = pwelch(d7(:, 2), win, [], [], Fs); [px8, ~] = pwelch(d8(:, 2), win, [], [], Fs);
And we compare all the signals (figures 3 and 4).
figure; hold on; plot(f, sqrt(px3), 'DisplayName', 'All ON'); plot(f, sqrt(px4), 'DisplayName', 'Ty OFF'); plot(f, sqrt(px5), 'DisplayName', 'Ry OFF'); plot(f, sqrt(px6), 'DisplayName', 'S-R OFF'); plot(f, sqrt(px7), 'DisplayName', 'Rz OFF'); plot(f, sqrt(px8), 'DisplayName', 'Hexa OFF'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('Amplitude Spectral Density $\left[\frac{V}{\sqrt{Hz}}\right]$') xlim([0.1, 500]); legend('Location', 'southwest');

Figure 3: Amplitude Spectral Density of the signal coming from the top geophone
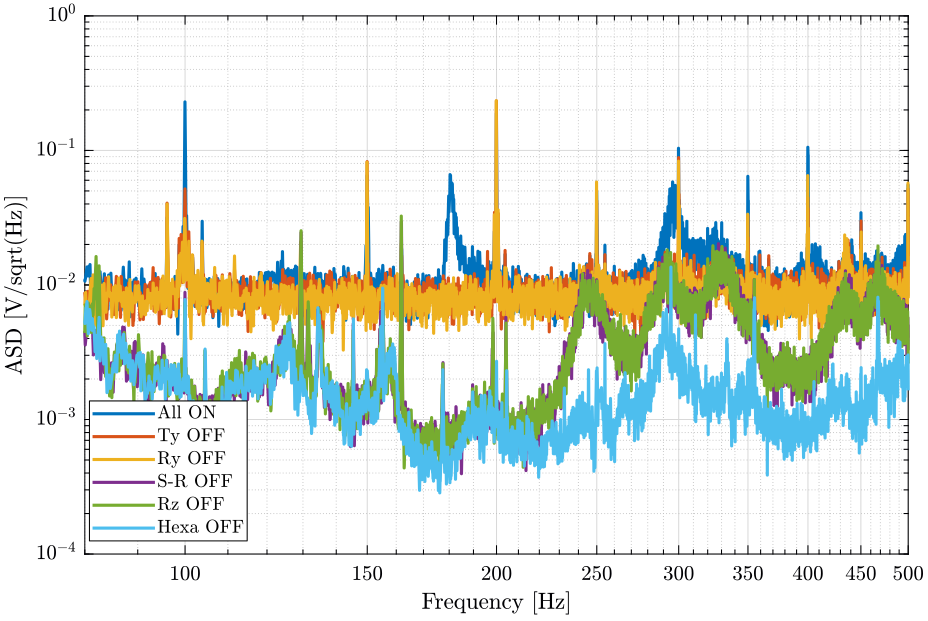
Figure 4: Amplitude Spectral Density of the signal coming from the top geophone (zoom at high frequencies)
1.4.2 Vibrations on the marble
Now we plot the same curves for the geophone located on the marble.
[px3, f] = pwelch(d3(:, 1), win, [], [], Fs); [px4, ~] = pwelch(d4(:, 1), win, [], [], Fs); [px5, ~] = pwelch(d5(:, 1), win, [], [], Fs); [px6, ~] = pwelch(d6(:, 1), win, [], [], Fs); [px7, ~] = pwelch(d7(:, 1), win, [], [], Fs); [px8, ~] = pwelch(d8(:, 1), win, [], [], Fs);
And we compare the Amplitude Spectral Densities (figures 5 and 6)
figure; hold on; plot(f, sqrt(px3), 'DisplayName', 'All ON'); plot(f, sqrt(px4), 'DisplayName', 'Ty OFF'); plot(f, sqrt(px5), 'DisplayName', 'Ry OFF'); plot(f, sqrt(px6), 'DisplayName', 'S-R OFF'); plot(f, sqrt(px7), 'DisplayName', 'Rz OFF'); plot(f, sqrt(px8), 'DisplayName', 'Hexa OFF'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('Amplitude Spectral Density $\left[\frac{V}{\sqrt{Hz}}\right]$') xlim([0.1, 500]); legend('Location', 'northeast');
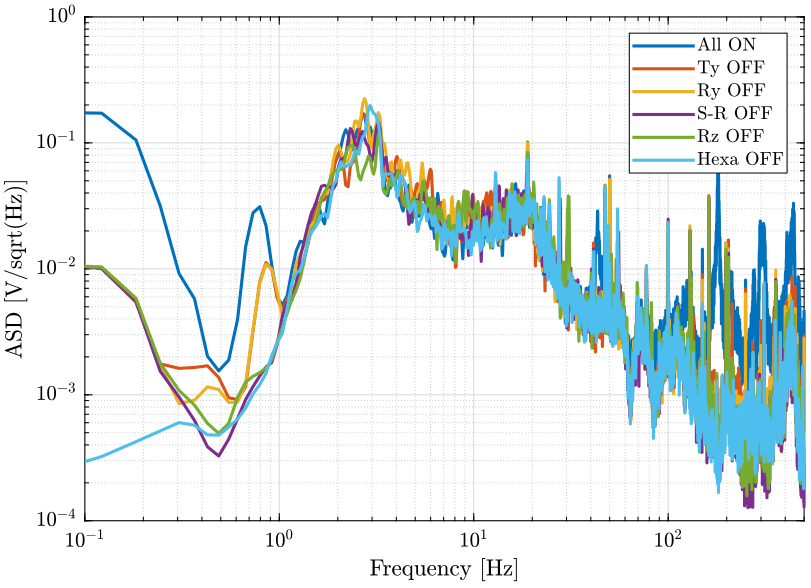
Figure 5: Amplitude Spectral Density of the signal coming from the top geophone
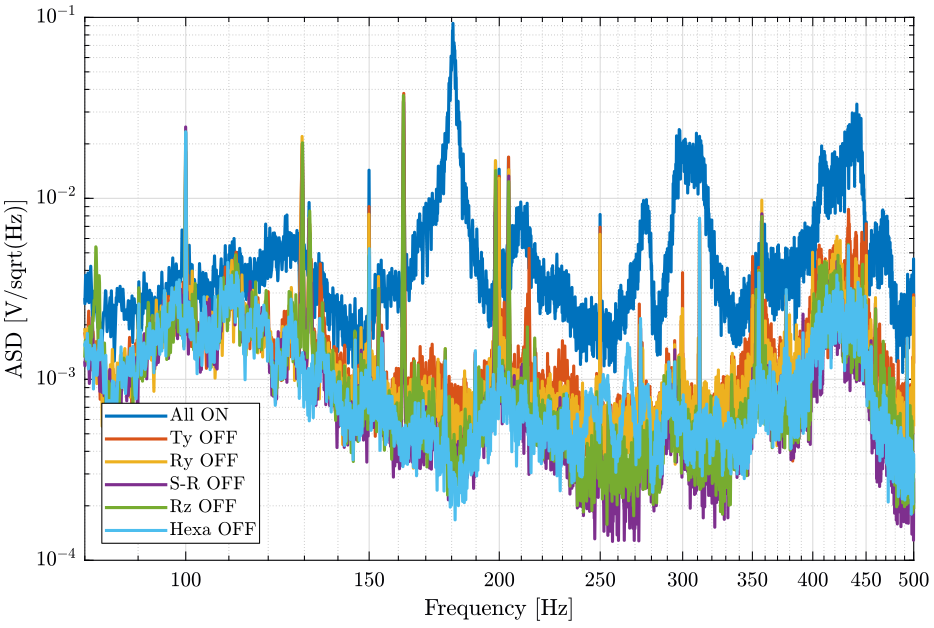
Figure 6: Amplitude Spectral Density of the signal coming from the top geophone (zoom at high frequencies)
1.5 Effect of the control system on the transmissibility from ground to sample
As the feedback loops change the dynamics of the system, we should see differences on the transfer function from marble velocity to sample velocity when turning off the control systems (figure 7).
dt = d3(2, 3) - d3(1, 3); Fs = 1/dt; win = hanning(ceil(1*Fs));
First, we compute the Power Spectral Density of the signals coming from the Geophone located at the sample location.
[T3, f] = tfestimate(d3(:, 1), d3(:, 2), win, [], [], Fs); [T4, ~] = tfestimate(d4(:, 1), d4(:, 2), win, [], [], Fs); [T5, ~] = tfestimate(d5(:, 1), d5(:, 2), win, [], [], Fs); [T6, ~] = tfestimate(d6(:, 1), d6(:, 2), win, [], [], Fs); [T7, ~] = tfestimate(d7(:, 1), d7(:, 2), win, [], [], Fs); [T8, ~] = tfestimate(d8(:, 1), d8(:, 2), win, [], [], Fs);
figure; ax1 = subplot(2, 1, 1); hold on; plot(f, abs(T3), 'DisplayName', 'All ON'); plot(f, abs(T4), 'DisplayName', 'Ty OFF'); plot(f, abs(T5), 'DisplayName', 'Ry OFF'); plot(f, abs(T6), 'DisplayName', 'S-R OFF'); plot(f, abs(T7), 'DisplayName', 'Rz OFF'); plot(f, abs(T8), 'DisplayName', 'Hexa OFF'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); set(gca, 'XTickLabel',[]); ylabel('Magnitude'); legend('Location', 'northwest'); ax2 = subplot(2, 1, 2); hold on; plot(f, mod(180+180/pi*phase(T3), 360)-180); plot(f, mod(180+180/pi*phase(T4), 360)-180); plot(f, mod(180+180/pi*phase(T5), 360)-180); plot(f, mod(180+180/pi*phase(T6), 360)-180); plot(f, mod(180+180/pi*phase(T7), 360)-180); plot(f, mod(180+180/pi*phase(T8), 360)-180); hold off; set(gca, 'xscale', 'log'); ylim([-180, 180]); yticks([-180, -90, 0, 90, 180]); xlabel('Frequency [Hz]'); ylabel('Phase'); linkaxes([ax1,ax2],'x'); xlim([1, 500]);
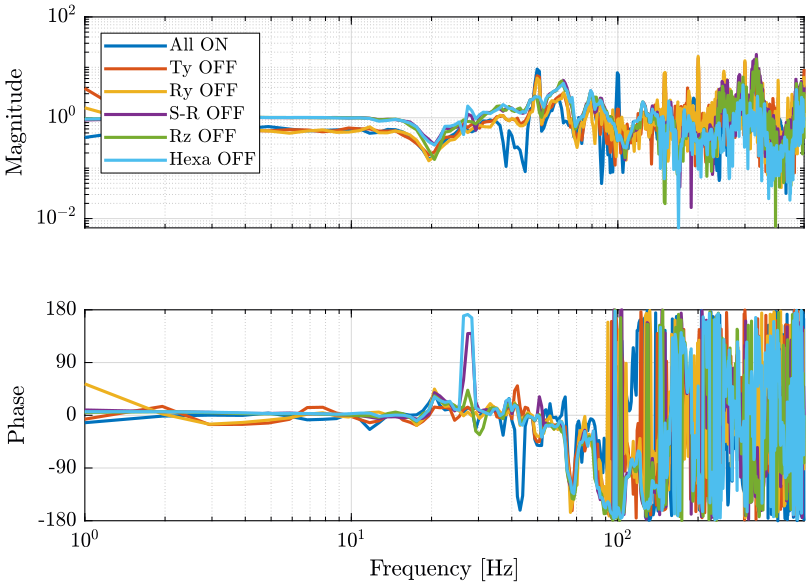
Figure 7: Comparison of the transfer function from the geophone on the marble to the geophone at the sample location
1.6 Conclusion
- The control system of the Ty stage induces a lot of vibrations of the marble
- Why it seems that the measurement noise at high frequency is the limiting factor when the slip ring is ON but not when it is OFF?
2 Effect of all the control systems on the Sample vibrations - One stage at a time
All the files (data and Matlab scripts) are accessible here.
2.1 Experimental Setup
We here measure the signals of two geophones:
- One is located on top of the Sample platform
- One is located on the marble
The signal from the top geophone does go trought the slip-ring.
All the control systems are turned OFF, then, they are turned on one at a time.
Each measurement are done during 100s.
The settings of the voltage amplifier are shown on figure 8:
- gain of 60dB
- AC/DC option set on DC
- Low pass filter set at 1kHz
A first order low pass filter with a cut-off frequency of 1kHz is added before the voltage amplifier.
| Ty | Ry | Slip Ring | Spindle | Hexapod | Meas. file |
|---|---|---|---|---|---|
| OFF | OFF | OFF | OFF | OFF | meas_013.mat |
| ON | OFF | OFF | OFF | OFF | meas_014.mat |
| OFF | ON | OFF | OFF | OFF | meas_015.mat |
| OFF | OFF | ON | OFF | OFF | meas_016.mat |
| OFF | OFF | OFF | ON | OFF | meas_017.mat |
| OFF | OFF | OFF | OFF | ON | meas_018.mat |
Each of the mat file contains one array data with 3 columns:
| Column number | Description |
|---|---|
| 1 | Geophone - Marble |
| 2 | Geophone - Sample |
| 3 | Time |
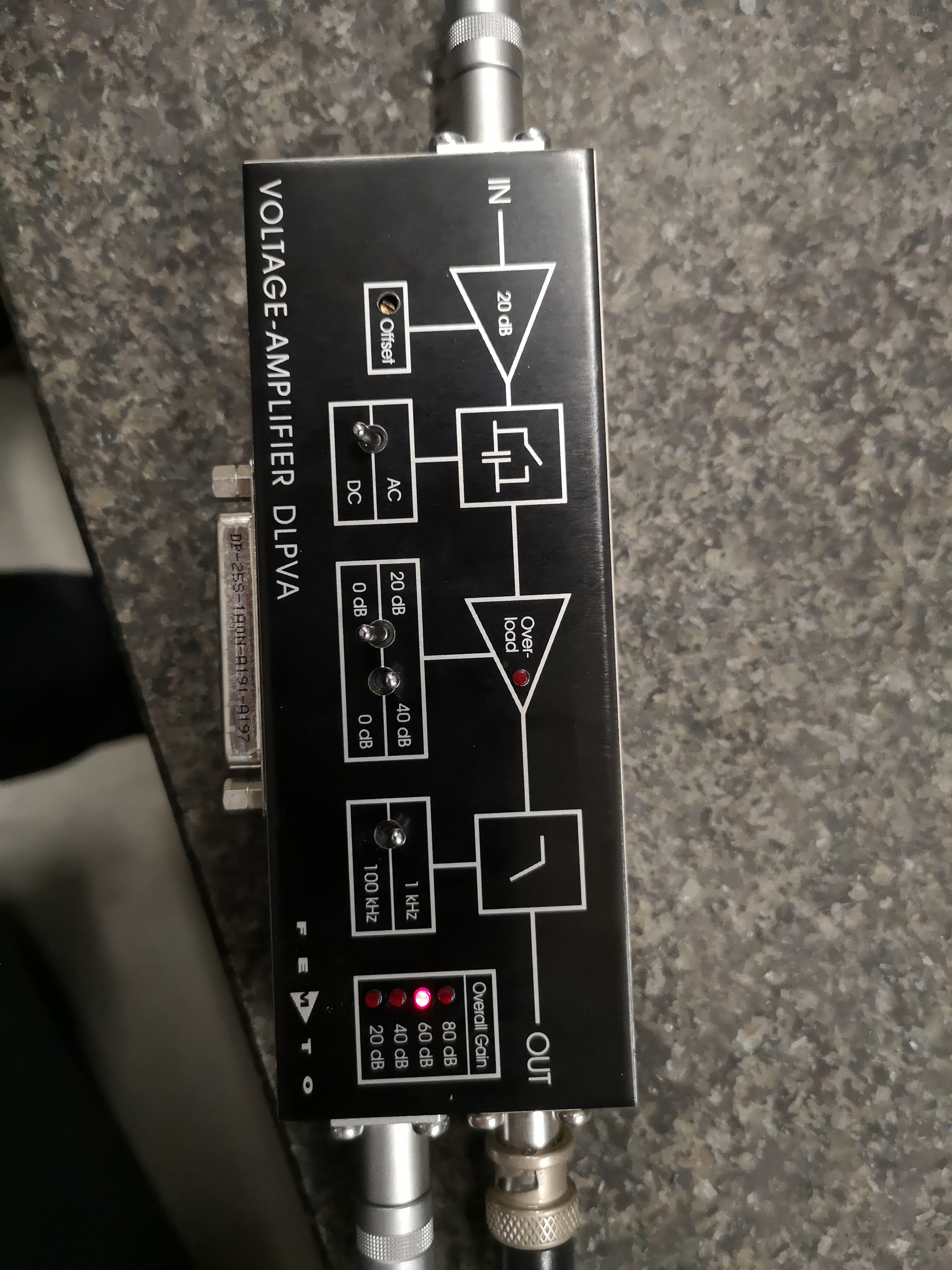
Figure 8: Voltage amplifier settings for the measurement
2.2 Load data
We load the data of the z axis of two geophones.
d_of = load('mat/data_013.mat', 'data'); d_of = d_of.data; d_ty = load('mat/data_014.mat', 'data'); d_ty = d_ty.data; d_ry = load('mat/data_015.mat', 'data'); d_ry = d_ry.data; d_sr = load('mat/data_016.mat', 'data'); d_sr = d_sr.data; d_rz = load('mat/data_017.mat', 'data'); d_rz = d_rz.data; d_he = load('mat/data_018.mat', 'data'); d_he = d_he.data;
2.3 Voltage to Velocity
We convert the measured voltage to velocity using the function voltageToVelocityL22 (accessible here).
gain = 60; % [dB] d_of(:, 1) = voltageToVelocityL22(d_of(:, 1), d_of(:, 3), gain); d_ty(:, 1) = voltageToVelocityL22(d_ty(:, 1), d_ty(:, 3), gain); d_ry(:, 1) = voltageToVelocityL22(d_ry(:, 1), d_ry(:, 3), gain); d_sr(:, 1) = voltageToVelocityL22(d_sr(:, 1), d_sr(:, 3), gain); d_rz(:, 1) = voltageToVelocityL22(d_rz(:, 1), d_rz(:, 3), gain); d_he(:, 1) = voltageToVelocityL22(d_he(:, 1), d_he(:, 3), gain); d_of(:, 2) = voltageToVelocityL22(d_of(:, 2), d_of(:, 3), gain); d_ty(:, 2) = voltageToVelocityL22(d_ty(:, 2), d_ty(:, 3), gain); d_ry(:, 2) = voltageToVelocityL22(d_ry(:, 2), d_ry(:, 3), gain); d_sr(:, 2) = voltageToVelocityL22(d_sr(:, 2), d_sr(:, 3), gain); d_rz(:, 2) = voltageToVelocityL22(d_rz(:, 2), d_rz(:, 3), gain); d_he(:, 2) = voltageToVelocityL22(d_he(:, 2), d_he(:, 3), gain);
2.4 Analysis - Time Domain
First, we can look at the time domain data and compare all the measurements:
- comparison for the geophone at the sample location (figure 9)
- comparison for the geophone on the granite (figure 10)
- relative displacement of the sample with respect to the marble (figure 10)
figure; hold on; plot(d_of(:, 3), d_of(:, 2), 'DisplayName', 'All OFF'); plot(d_ty(:, 3), d_ty(:, 2), 'DisplayName', 'Ty ON'); plot(d_ry(:, 3), d_ry(:, 2), 'DisplayName', 'Ry ON'); plot(d_sr(:, 3), d_sr(:, 2), 'DisplayName', 'S-R ON'); plot(d_rz(:, 3), d_rz(:, 2), 'DisplayName', 'Rz ON'); plot(d_he(:, 3), d_he(:, 2), 'DisplayName', 'Hexa ON'); hold off; xlabel('Time [s]'); ylabel('Velocity [m/s]'); xlim([0, 50]); legend('Location', 'bestoutside');
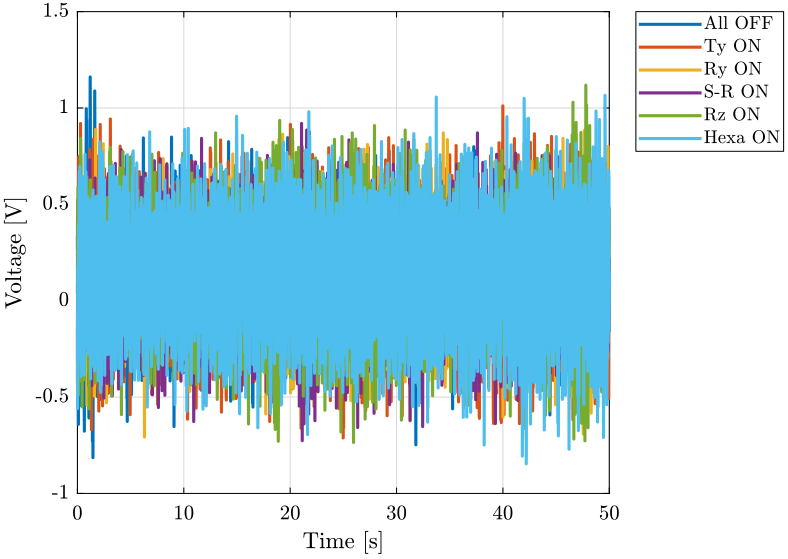
Figure 9: Comparison of the time domain data when turning off the control system of the stages - Geophone at the sample location
figure; hold on; plot(d_of(:, 3), d_of(:, 1), 'DisplayName', 'All OFF'); plot(d_ty(:, 3), d_ty(:, 1), 'DisplayName', 'Ty ON'); plot(d_ry(:, 3), d_ry(:, 1), 'DisplayName', 'Ry ON'); plot(d_sr(:, 3), d_sr(:, 1), 'DisplayName', 'S-R ON'); plot(d_rz(:, 3), d_rz(:, 1), 'DisplayName', 'Rz ON'); plot(d_he(:, 3), d_he(:, 1), 'DisplayName', 'Hexa ON'); hold off; xlabel('Time [s]'); ylabel('Velocity [m/s]'); xlim([0, 50]); legend('Location', 'bestoutside');
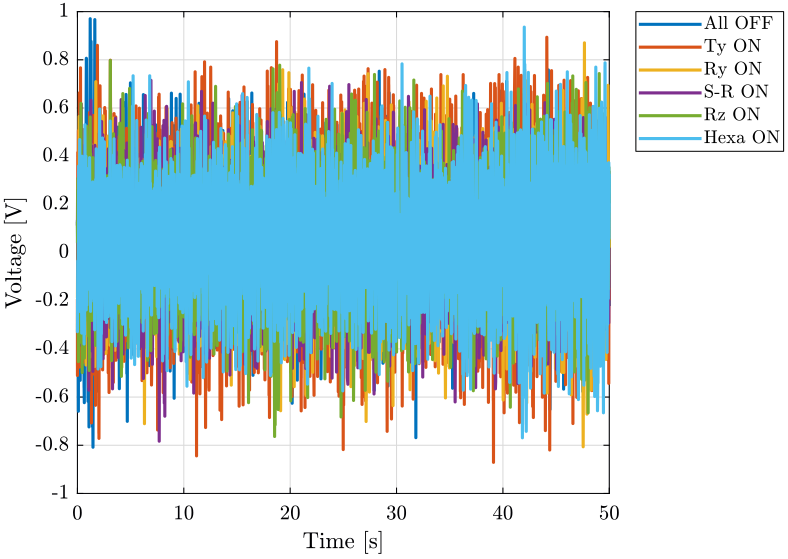
Figure 10: Comparison of the time domain data when turning off the control system of the stages - Geophone on the marble
figure; hold on; plot(d_of(:, 3), 1e6*lsim(1/(1+s/(2*pi*0.5)), d_of(:, 2)-d_of(:, 1), d_of(:, 3)), 'DisplayName', 'All OFF'); plot(d_ty(:, 3), 1e6*lsim(1/(1+s/(2*pi*0.5)), d_ty(:, 2)-d_ty(:, 1), d_ty(:, 3)), 'DisplayName', 'Ty ON'); plot(d_ry(:, 3), 1e6*lsim(1/(1+s/(2*pi*0.5)), d_ry(:, 2)-d_ry(:, 1), d_ry(:, 3)), 'DisplayName', 'Ry ON'); plot(d_sr(:, 3), 1e6*lsim(1/(1+s/(2*pi*0.5)), d_sr(:, 2)-d_sr(:, 1), d_sr(:, 3)), 'DisplayName', 'S-R ON'); plot(d_rz(:, 3), 1e6*lsim(1/(1+s/(2*pi*0.5)), d_rz(:, 2)-d_rz(:, 1), d_rz(:, 3)), 'DisplayName', 'Rz ON'); plot(d_he(:, 3), 1e6*lsim(1/(1+s/(2*pi*0.5)), d_he(:, 2)-d_he(:, 1), d_he(:, 3)), 'DisplayName', 'Hexa ON'); hold off; xlabel('Time [s]'); ylabel('Relative Displacement [$\mu m$]'); xlim([0, 50]); legend('Location', 'bestoutside');
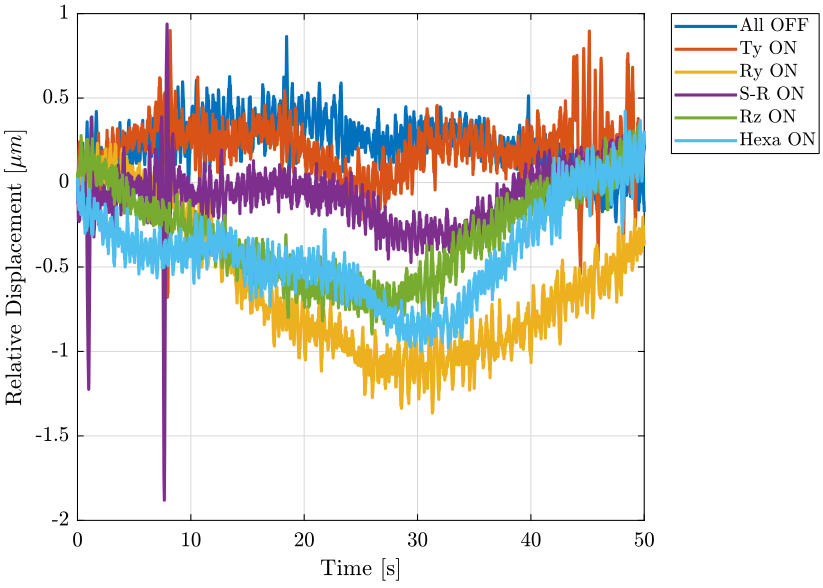
Figure 11: Relative displacement of the sample with respect to the marble
2.5 Analysis - Frequency Domain
dt = d_of(2, 3) - d_of(1, 3); Fs = 1/dt; win = hanning(ceil(10*Fs));
2.5.1 Vibrations at the sample location
First, we compute the Power Spectral Density of the signals coming from the Geophone located at the sample location.
[px_of, f] = pwelch(d_of(:, 2), win, [], [], Fs); [px_ty, ~] = pwelch(d_ty(:, 2), win, [], [], Fs); [px_ry, ~] = pwelch(d_ry(:, 2), win, [], [], Fs); [px_sr, ~] = pwelch(d_sr(:, 2), win, [], [], Fs); [px_rz, ~] = pwelch(d_rz(:, 2), win, [], [], Fs); [px_he, ~] = pwelch(d_he(:, 2), win, [], [], Fs);
And we compare all the signals (figures 12 and 13).
figure; hold on; plot(f, sqrt(px_of), 'DisplayName', 'All OFF'); plot(f, sqrt(px_ty), 'DisplayName', 'Ty ON'); plot(f, sqrt(px_ry), 'DisplayName', 'Ry ON'); plot(f, sqrt(px_sr), 'DisplayName', 'S-R ON'); plot(f, sqrt(px_rz), 'DisplayName', 'Rz ON'); plot(f, sqrt(px_he), 'DisplayName', 'Hexa ON'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('Amplitude Spectral Density $\left[\frac{m/s}{\sqrt{Hz}}\right]$') xlim([0.1, 500]); legend('Location', 'southwest');
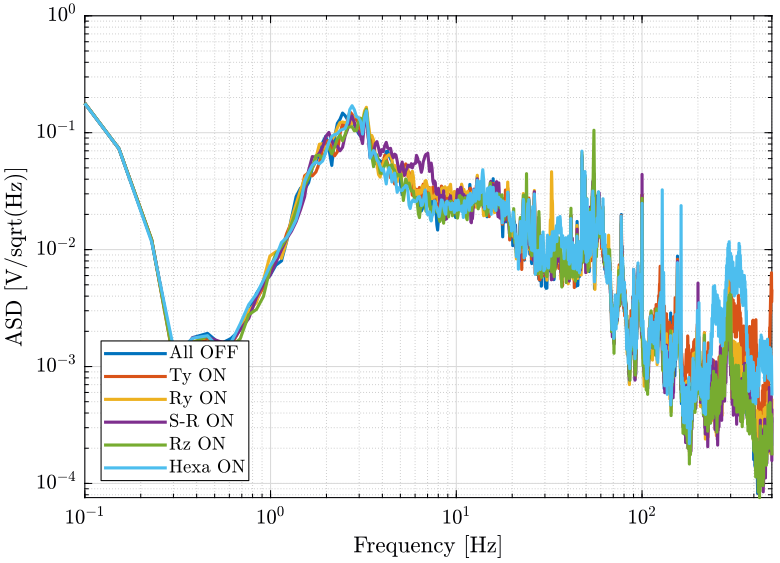
Figure 12: Amplitude Spectral Density of the sample velocity
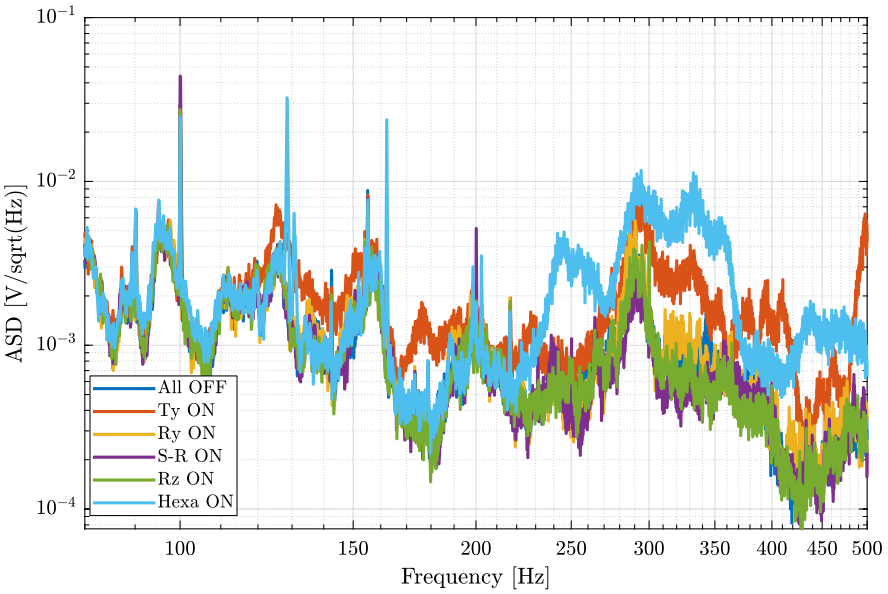
Figure 13: Amplitude Spectral Density of the sample velocity (zoom at high frequencies)
2.5.2 Vibrations on the marble
Now we plot the same curves for the geophone located on the marble.
[px_of, f] = pwelch(d_of(:, 1), win, [], [], Fs); [px_ty, ~] = pwelch(d_ty(:, 1), win, [], [], Fs); [px_ry, ~] = pwelch(d_ry(:, 1), win, [], [], Fs); [px_sr, ~] = pwelch(d_sr(:, 1), win, [], [], Fs); [px_rz, ~] = pwelch(d_rz(:, 1), win, [], [], Fs); [px_he, ~] = pwelch(d_he(:, 1), win, [], [], Fs);
And we compare the Amplitude Spectral Densities (figures 14 and 15)
figure; hold on; plot(f, sqrt(px_of), 'DisplayName', 'All OFF'); plot(f, sqrt(px_ty), 'DisplayName', 'Ty ON'); plot(f, sqrt(px_ry), 'DisplayName', 'Ry ON'); plot(f, sqrt(px_sr), 'DisplayName', 'S-R ON'); plot(f, sqrt(px_rz), 'DisplayName', 'Rz ON'); plot(f, sqrt(px_he), 'DisplayName', 'Hexa ON'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('Amplitude Spectral Density $\left[\frac{m/s}{\sqrt{Hz}}\right]$') xlim([0.1, 500]); legend('Location', 'northeast');
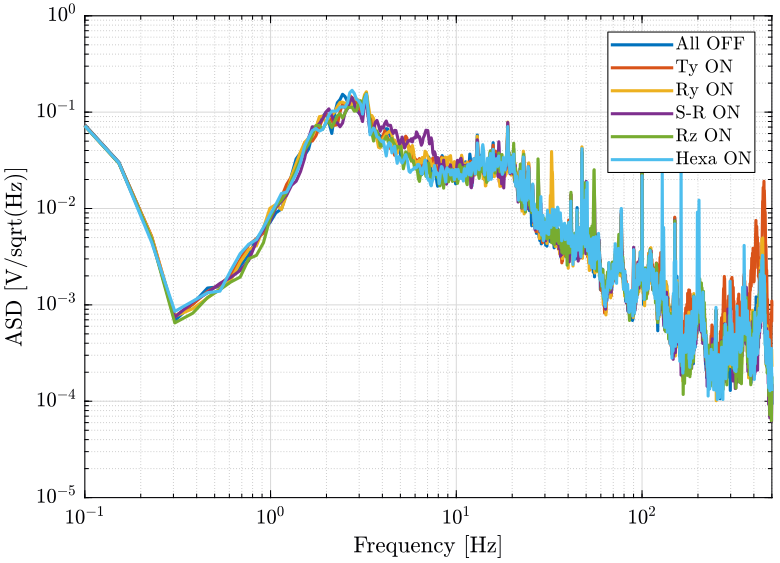
Figure 14: Amplitude Spectral Density of the marble velocity
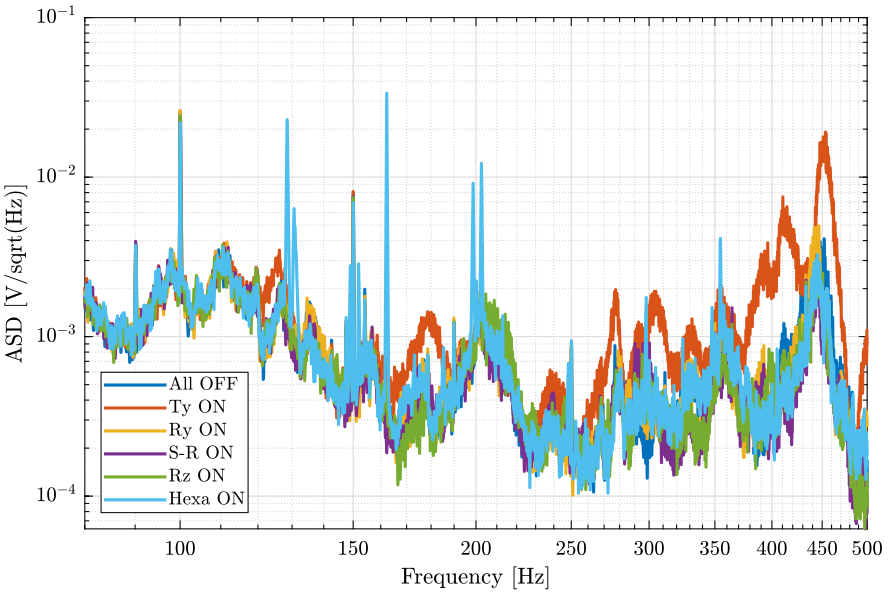
Figure 15: Amplitude Spectral Density of the marble velocity (zoom at high frequencies)
2.6 Conclusion
- The Ty stage induces vibrations of the marble and at the sample location above 100Hz
- The hexapod stage induces vibrations at the sample position above 220Hz
3 Effect of the Symetrie Driver
All the files (data and Matlab scripts) are accessible here.
3.1 Experimental Setup
We here measure the signals of two geophones:
- One is located on top of the Sample platform
- One is located on the marble
The signal from the top geophone does go trought the slip-ring.
All the control systems are turned OFF except the Hexapod one.
Each measurement are done during 100s.
The settings of the voltage amplifier are:
- DC
- 60dB
- 1kHz
A first order low pass filter with a cut-off frequency of 1kHz is added before the voltage amplifier.
The measurements are:
meas_018.mat: Hexapod's driver on the granitemeas_019.mat: Hexapod's driver on the ground
Each of the mat file contains one array data with 3 columns:
| Column number | Description |
|---|---|
| 1 | Geophone - Marble |
| 2 | Geophone - Sample |
| 3 | Time |
3.2 Load data
We load the data of the z axis of two geophones.
d_18 = load('mat/data_018.mat', 'data'); d_18 = d_18.data; d_19 = load('mat/data_019.mat', 'data'); d_19 = d_19.data;
3.3 Analysis - Time Domain
figure; hold on; plot(d_19(:, 3), d_19(:, 1), 'DisplayName', 'Driver - Ground'); plot(d_18(:, 3), d_18(:, 1), 'DisplayName', 'Driver - Granite'); hold off; xlabel('Time [s]'); ylabel('Voltage [V]'); xlim([0, 50]); legend('Location', 'bestoutside');
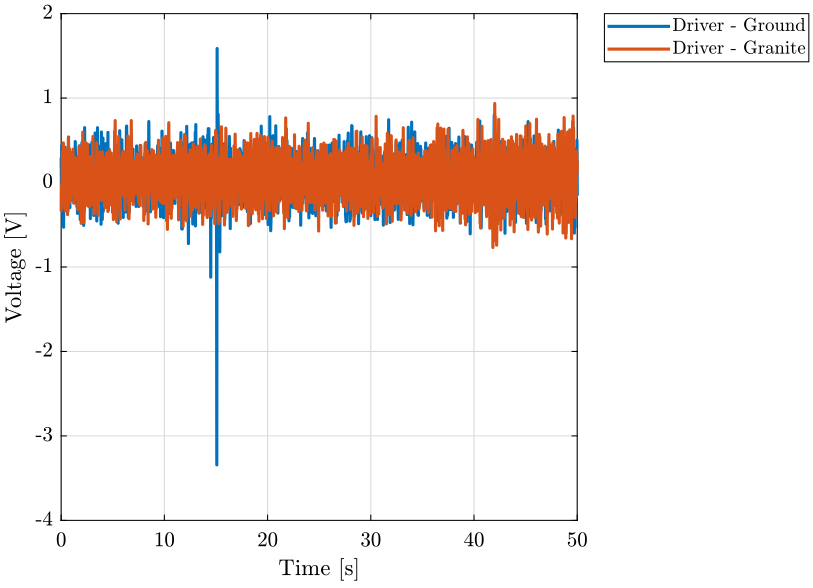
Figure 16: Comparison of the time domain data when turning off the control system of the stages - Geophone at the sample location
3.4 Analysis - Frequency Domain
dt = d_18(2, 3) - d_18(1, 3); Fs = 1/dt; win = hanning(ceil(10*Fs));
3.4.1 Vibrations at the sample location
First, we compute the Power Spectral Density of the signals coming from the Geophone located at the sample location.
[px_18, f] = pwelch(d_18(:, 1), win, [], [], Fs); [px_19, ~] = pwelch(d_19(:, 1), win, [], [], Fs);
figure; hold on; plot(f, sqrt(px_19), 'DisplayName', 'Driver - Ground'); plot(f, sqrt(px_18), 'DisplayName', 'Driver - Granite'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('Amplitude Spectral Density $\left[\frac{V}{\sqrt{Hz}}\right]$') xlim([0.1, 500]); legend('Location', 'southwest');
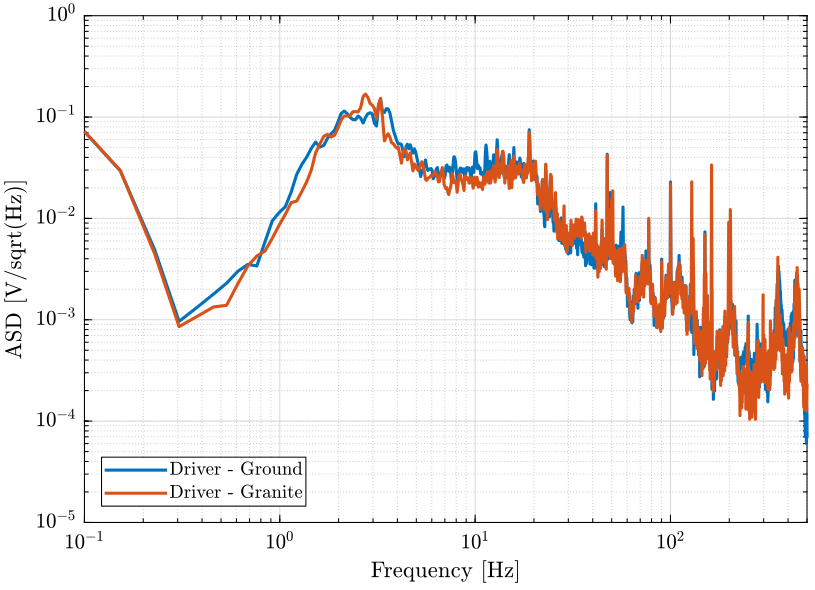
Figure 17: Amplitude Spectral Density of the signal coming from the top geophone
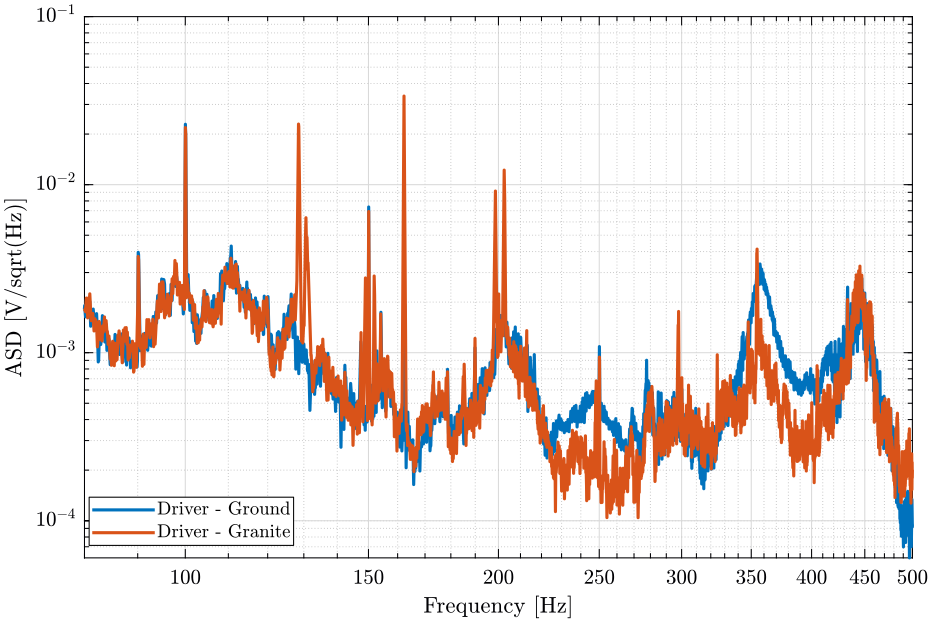
Figure 18: Amplitude Spectral Density of the signal coming from the top geophone (zoom at high frequencies)
3.5 Conclusion
Even tough the Hexapod's driver vibrates quite a lot, it does not generate significant vibrations of the granite when either placed on the granite or on the ground.