Cercalo Test Bench
Table of Contents
1 Introduction
1.1 Signals
| Signal | Name | Unit | Number |
|---|---|---|---|
| Voltage Sent to Cercalo - Horizontal | Uch |
[V] | 1 |
| Voltage Sent to Cercalo - Vertical | Ucv |
[V] | 2 |
| Voltage Sent to Newport - Horizontal | Unh |
[V] | 3 |
| Voltage Sent to Newport - Vertical | Unv |
[V] | 4 |
| 4Q Photodiode Measurement - Horizontal | Vph |
[V] | 5 |
| 4Q Photodiode Measurement - Vertical | Vpv |
[V] | 6 |
| Measured Voltage across the Inductance - Horizontal | Vch |
[V] | 7 |
| Measured Voltage across the Inductance - Vertical | Vcv |
[V] | 8 |
| Newport Metrology - Horizontal | Vnh |
[V] | 9 |
| Newport Metrology - Vertical | Vnv |
[V] | 10 |
| Attocube Measurement | Va |
[m] | 11 |
1.2 Cercalo
| Maximum Stroke [deg] | Resonance Frequency [Hz] | DC Gain [mA/deg] | Gain at resonance [deg/V] | RC Resistance [Ohm] | |
|---|---|---|---|---|---|
| AX1 | 5 | 411.13 | 28.4 | 382.9 | 9.41 |
| AX2 | 5 | 252.5 | 35.2 | 350.4 |
L = 0.1mH on both directions
Resistance= 41 Ohm
Ax2 = 8.3 Ax1 = 9.3
1.3 Optical Setup
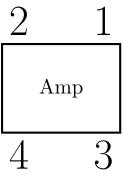
1.4 4 quadrant Diode
Front view of the photodiode.

Signals going to the amplifier on the board. The amplifier is located on the bottom right of the board.
1.5 ADC/DAC
Let's compute the theoretical noise of the ADC/DAC.
\begin{align*} \Delta V &= 20 V \\ n &= 16bits \\ q &= \Delta V/2^n = 305 \mu V \\ f_N &= 10kHz \\ \Gamma_n &= \frac{q^2}{12 f_N} = 7.76 \cdot 10^{-13} \frac{V^2}{Hz} \end{align*}with \(\Delta V\) the total range of the ADC, \(n\) its number of bits, \(q\) the quantization, \(f_N\) the sampling frequency and \(\Gamma_n\) its theoretical Power Spectral Density.
1.6 Amplifier for the Cercalo
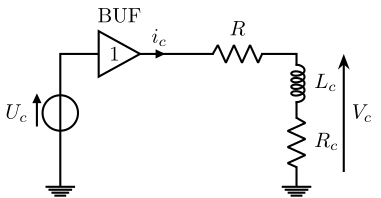
The values of the parameters are:
- \(R_h = 41 \Omega\)
- \(L_{c,h} = 0.1 mH\)
- \(R_{c,h} = 9.3 \Omega\)
- \(R_v = 41 \Omega\)
- \(L_{c,v} = 0.1 mH\)
- \(R_{c,v} = 8.3 \Omega\)
We want to find the transfer function from \(U_c\) to \(V_L\) and from \(U_c\) to \(i_c\).
We have that:
\begin{align*} V_C &= R_c i + L_c s i \\ U_c &= (R + R_c) i + L_c s i \end{align*}Thus:
\begin{align} \frac{i_c}{U_c} &= \frac{1}{(R + R_c) + L_c s} \\ &= \frac{G_0}{1 + s/\omega_0} \end{align}with
- \(G_{0,i} = \frac{1}{R + R_c}\)
- \(\omega_0 = \frac{R + R_c}{L_c}\)
And
\begin{align} \frac{V_c}{U_c} &= \frac{R_c + L_c s}{(R + R_c) + L_c s} \\ &= \frac{\frac{R_c}{R + R_c} + \frac{L_c}{R + R_c} s}{1 + \frac{L_c}{R + R_c} s} \\ &= \frac{G_0 + s/\omega_0}{1 + s/\omega_0} \\ \end{align}with
- \(G_0 = \frac{R_c}{R + R_c}\)
- \(\omega_0 = \frac{R + R_c}{L_c}\)
Rh = 41; % [Ohm] Lch = 0.1e-3; % [H] Rch = 9.3; % [Ohm] Rv = 41; % [Ohm] Lcv = 0.1e-3; % [H] Rcv = 8.3; % [Ohm]
Gih = 1/(Rh + Rch + Lch * s); Gvh = (Rch + Lch * s)/(Rh + Rch + Lch * s); Giv = 1/(Rv + Rcv + Lcv * s); Gvv = (Rcv + Lcv * s)/(Rv + Rcv + Lcv * s);
The current amplifier has a constant gain over all the frequency band of interest.
Gih0 = freqresp(Gih, 0); Gvh0 = freqresp(Gvh, 0); Giv0 = freqresp(Giv, 0); Gvv0 = freqresp(Gvv, 0);
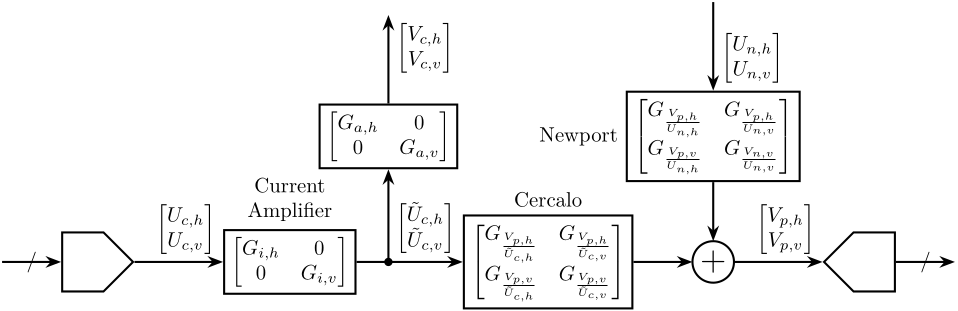
1.7 Block Diagram
\begin{tikzpicture} \node[DAC] (dac) at (0, 0) {}; \node[block, right=1.2 of dac] (Gi) {$G_i$}; \node[block, right=1.5 of Gi] (Gc) {$G_c$}; \node[addb, right=0.5 of Gc] (add) {}; \node[block, above= of add] (Gn) {$G_n$}; \node[ADC, right=1.2 of add] (adc) {}; \coordinate (GiGc) at ($0.8*(Gi.east) + 0.2*(Gc.west)$); \node[block] (Amp) at (GiGc|-Gn) {$G_a$}; \node[above, align=center] at (Gi.north) {Current\\Amplifier}; \node[above, align=center] at (Gc.north) {Cercalo}; \node[left, align=right] at (Gn.west) {Newport}; \draw[->] ($(dac.west) + (-1, 0)$) --node[midway, sloped]{$/$} (dac.west); \draw[->] (dac.east) -- (Gi.west) node[above left]{$\begin{bmatrix}U_{c,h} \\ U_{c,v}\end{bmatrix}$}; \draw[->] (Gi.east) -- (Gc.west) node[above left]{$\begin{bmatrix}\tilde{U}_{c,h} \\ \tilde{U}_{c,v}\end{bmatrix}$}; \draw[->] (Gc.east) -- (add.west); \draw[->] (Gn.south) -- (add.north); \draw[->] (GiGc)node[branch]{} -- (Amp.south); \draw[->] (Amp.north) -- ++(0, 1.5) node[below right]{$\begin{bmatrix}V_{c,h} \\ V_{c,v}\end{bmatrix}$}; \draw[->] ($(Gn.north) + (0, 1.5)$) -- (Gn.north) node[above right]{$\begin{bmatrix}U_{n,h} \\ U_{n,v}\end{bmatrix}$}; \draw[->] (add.east) -- (adc.west) node[above left]{$\begin{bmatrix}V_{p,h} \\ V_{p,v}\end{bmatrix}$}; \draw[->] (adc.east) --node[midway, sloped]{$/$} ++(1, 0); \end{tikzpicture}

- Transfer function for the Current Amplifier: \[ G_i = \begin{bmatrix} G_{i,h} & 0 \\ 0 & G_{i,v} \end{bmatrix} \]
- Transfer function for the Voltage Amplifier: \[ G_a = \begin{bmatrix} G_{a,h} & 0 \\ 0 & G_{a,v} \end{bmatrix} \]
- Transfer function from the Voltage across the Cercalo inductors to the 4 quadrant measurement \[ G_c = \begin{bmatrix} G_{\frac{V_{p,h}}{\tilde{U}_{c,h}}} & G_{\frac{V_{p,h}}{\tilde{U}_{c,v}}} \\ G_{\frac{V_{p,v}}{\tilde{U}_{c,h}}} & G_{\frac{V_{p,v}}{\tilde{U}_{c,v}}} \end{bmatrix} \]
- Transfer function from the Newport command signal to the 4 quadrant measurement \[ G_n = \begin{bmatrix} G_{\frac{V_{p,h}}{U_{n,h}}} & G_{\frac{V_{p,h}}{U_{n,v}}} \\ G_{\frac{V_{p,v}}{U_{n,h}}} & G_{\frac{V_{n,v}}{U_{n,v}}} \end{bmatrix} \]
\begin{tikzpicture} \node[DAC] (dac) at (0, 0) {}; \node[block, right=1.5 of dac] (Gi) {$\begin{bmatrix} G_{i,h} & 0 \\ 0 & G_{i,v} \end{bmatrix}$}; \node[block, right=1.8 of Gi] (Gc) {$\begin{bmatrix} G_{\frac{V_{p,h}}{\tilde{U}_{c,h}}} & G_{\frac{V_{p,h}}{\tilde{U}_{c,v}}} \\ G_{\frac{V_{p,v}}{\tilde{U}_{c,h}}} & G_{\frac{V_{p,v}}{\tilde{U}_{c,v}}} \end{bmatrix}$}; \node[addb, right= of Gc] (add) {}; \node[block, above= of add] (Gn) {$\begin{bmatrix} G_{\frac{V_{p,h}}{U_{n,h}}} & G_{\frac{V_{p,h}}{U_{n,v}}} \\ G_{\frac{V_{p,v}}{U_{n,h}}} & G_{\frac{V_{n,v}}{U_{n,v}}} \end{bmatrix}$}; \node[ADC, right = 1.5 of add] (adc) {}; \coordinate (GiGc) at ($0.7*(Gi.east) + 0.3*(Gc.west)$); \node[block] (Amp) at (GiGc|-Gn) {$\begin{bmatrix} G_{a,h} & 0 \\ 0 & G_{a,v} \end{bmatrix}$}; \node[above, align=center] at (Gi.north) {Current\\Amplifier}; \node[above, align=center] at (Gc.north) {Cercalo}; \node[left, align=right] at (Gn.west) {Newport}; \draw[->] ($(dac.west) + (-1, 0)$) --node[midway, sloped]{$/$} (dac.west); \draw[->] (dac.east) -- (Gi.west) node[above left]{$\begin{bmatrix}U_{c,h} \\ U_{c,v}\end{bmatrix}$}; \draw[->] (Gi.east) -- (Gc.west) node[above left]{$\begin{bmatrix}\tilde{U}_{c,h} \\ \tilde{U}_{c,v}\end{bmatrix}$}; \draw[->] (Gc.east) -- (add.west); \draw[->] (Gn.south) -- (add.north); \draw[->] (GiGc)node[branch]{} -- (Amp.south); \draw[->] (Amp.north) -- ++(0, 1.5) node[below right]{$\begin{bmatrix}V_{c,h} \\ V_{c,v}\end{bmatrix}$}; \draw[->] ($(Gn.north) + (0, 1.5)$) -- (Gn.north) node[above right]{$\begin{bmatrix}U_{n,h} \\ U_{n,v}\end{bmatrix}$}; \draw[->] (add.east) -- (adc.west) node[above left]{$\begin{bmatrix}V_{p,h} \\ V_{p,v}\end{bmatrix}$}; \draw[->] (adc.east) --node[midway, sloped]{$/$} ++(1, 0); \end{tikzpicture}
2 Identification
All the files (data and Matlab scripts) are accessible here.
2.1 Excitation Data
fs = 1e4; Ts = 1/fs;
We generate white noise with the "random number" simulink block, and we filter that noise.
Gi = (1)/(1+s/2/pi/100);
c2d(Gi, Ts, 'tustin')
c2d(Gi, Ts, 'tustin')
ans =
0.030459 (z+1)
--------------
(z-0.9391)
Sample time: 0.0001 seconds
Discrete-time zero/pole/gain model.
2.2 Signals
| Signal | Name | Unit |
|---|---|---|
| Voltage Sent to Cercalo - Horizontal | Uch |
[V] |
| Voltage Sent to Cercalo - Vertical | Ucv |
[V] |
| Voltage Sent to Newport - Horizontal | Unh |
[V] |
| Voltage Sent to Newport - Vertical | Unv |
[V] |
| 4Q Photodiode Measurement - Horizontal | Vph |
[V] |
| 4Q Photodiode Measurement - Vertical | Vpv |
[V] |
| Measured Voltage across the Inductance - Horizontal | Vch |
[V] |
| Measured Voltage across the Inductance - Vertical | Vcv |
[V] |
| Newport Metrology - Horizontal | Vnh |
[V] |
| Newport Metrology - Vertical | Vnv |
[V] |
| Attocube Measurement | Va |
[m] |
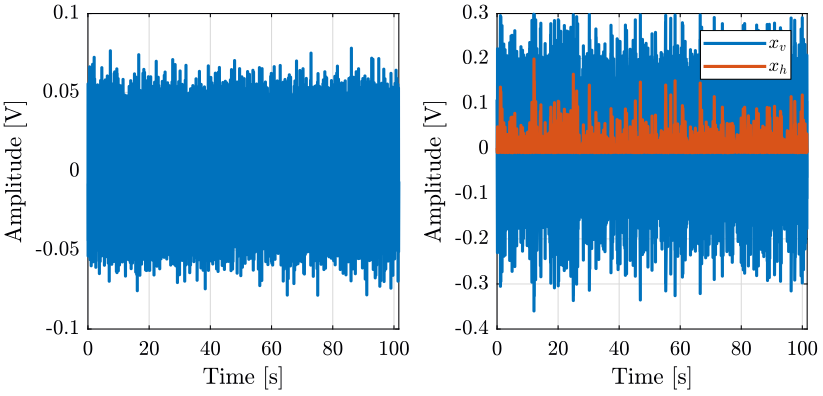
2.3 Huddle Test
We load the data taken during the Huddle Test.
load('mat/data_test.mat', ... 't', 'Uch', 'Ucv', ... 'Unh', 'Unv', ... 'Vph', 'Vpv', ... 'Vch', 'Vcv', ... 'Vnh', 'Vnv', ... 'Va');
We remove the first second of data where everything is settling down.
t0 = 1; Uch(t<t0) = []; Ucv(t<t0) = []; Unh(t<t0) = []; Unv(t<t0) = []; Vph(t<t0) = []; Vpv(t<t0) = []; Vch(t<t0) = []; Vcv(t<t0) = []; Vnh(t<t0) = []; Vnv(t<t0) = []; Va(t<t0) = []; t(t<t0) = []; t = t - t(1); % We start at t=0
We compute the Power Spectral Density of the horizontal and vertical positions of the beam as measured by the 4 quadrant diode.
[psd_Vph, f] = pwelch(Vph, hanning(ceil(1*fs)), [], [], fs); [psd_Vpv, ~] = pwelch(Vpv, hanning(ceil(1*fs)), [], [], fs);
figure; hold on; plot(f, sqrt(psd_Vph), 'DisplayName', '$\Gamma_{Vp_h}$'); plot(f, sqrt(psd_Vpv), 'DisplayName', '$\Gamma_{Vp_v}$'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('ASD $\left[\frac{V}{\sqrt{Hz}}\right]$') legend('Location', 'southwest'); xlim([1, 1000]);
We compute the Power Spectral Density of the voltage across the inductance used for horizontal and vertical positioning of the Cercalo.
[psd_Vch, f] = pwelch(Vch, hanning(ceil(1*fs)), [], [], fs); [psd_Vcv, ~] = pwelch(Vcv, hanning(ceil(1*fs)), [], [], fs);
figure; hold on; plot(f, sqrt(psd_Vch), 'DisplayName', '$\Gamma_{Vc_h}$'); plot(f, sqrt(psd_Vcv), 'DisplayName', '$\Gamma_{Vc_v}$'); hold off; set(gca, 'xscale', 'log'); set(gca, 'yscale', 'log'); xlabel('Frequency [Hz]'); ylabel('ASD $\left[\frac{V}{\sqrt{Hz}}\right]$') legend('Location', 'southwest'); xlim([1, 1000]);
2.4 Input / Output data
The identification data is loaded
uh = load('mat/data_uh.mat', ... 't', 'Uch', 'Ucv', ... 'Unh', 'Unv', ... 'Vph', 'Vpv', ... 'Vch', 'Vcv', ... 'Vnh', 'Vnv', ... 'Va'); uv = load('mat/data_uh.mat', ... 't', 'Uch', 'Ucv', ... 'Unh', 'Unv', ... 'Vph', 'Vpv', ... 'Vch', 'Vcv', ... 'Vnh', 'Vnv', ... 'Va');
We remove the first seconds where the Cercalo is turned on.
t0 = 1; uh.Uch(t<t0) = []; uh.Ucv(t<t0) = []; uh.Unh(t<t0) = []; uh.Unv(t<t0) = []; uh.Vph(t<t0) = []; uh.Vpv(t<t0) = []; uh.Vch(t<t0) = []; uh.Vcv(t<t0) = []; uh.Vnh(t<t0) = []; uh.Vnv(t<t0) = []; uh.Va(t<t0) = []; uh.t(t<t0) = []; uh.t = uh.t - uh.t(1); % We start at t=0 t0 = 1; uv.Uch(t<t0) = []; uv.Ucv(t<t0) = []; uv.Unh(t<t0) = []; uv.Unv(t<t0) = []; uv.Vph(t<t0) = []; uv.Vpv(t<t0) = []; uv.Vch(t<t0) = []; uv.Vcv(t<t0) = []; uv.Vnh(t<t0) = []; uv.Vnv(t<t0) = []; uv.Va(t<t0) = []; uv.t(t<t0) = []; uv.t = uv.t - uv.t(1); % We start at t=0

2.5 Estimation of the Frequency Response Function Matrix
win = hanning(ceil(1*fs));
We compute an estimate of the transfer functions.
[tf_Uch_Vph, f] = tfestimate(uh.Uch, uh.Vph, win, [], [], fs); [tf_Uch_Vpv, ~] = tfestimate(uh.Uch, uh.Vpv, win, [], [], fs); [tf_Ucv_Vph, ~] = tfestimate(uv.Ucv, uv.Vph, win, [], [], fs); [tf_Ucv_Vpv, ~] = tfestimate(uv.Ucv, uv.Vpv, win, [], [], fs);

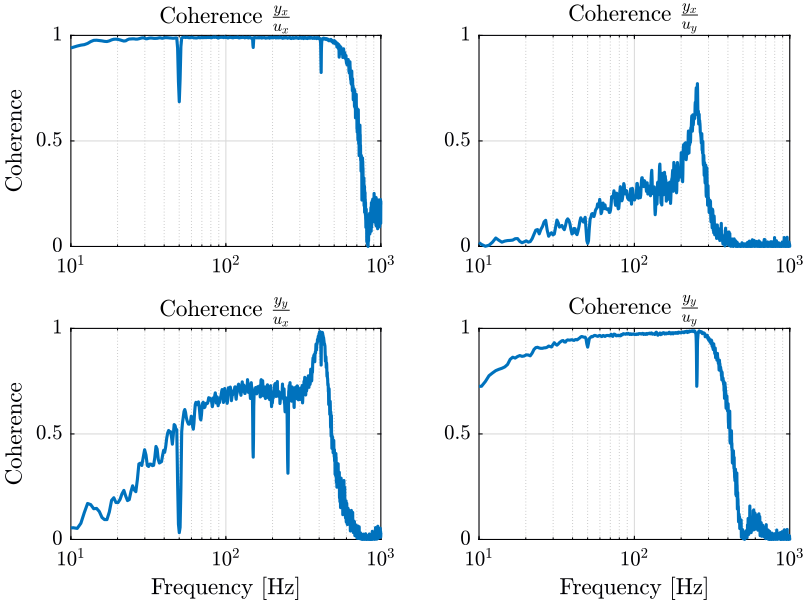
2.6 Coherence
2.7 Extraction of a transfer function matrix
First we define the initial guess for the resonance frequencies and the weights associated.
freqs_res_uh = [410]; % [Hz] freqs_res_uv = [250]; % [Hz]
From the number of resonance frequency we want to fit, we define the order N of the system we want to obtain.
N = 2;
We then make an initial guess on the complex values of the poles.
xi = 0.001; % Approximate modal damping poles_uh = [2*pi*freqs_res_uh*(xi + 1i), 2*pi*freqs_res_uh*(xi - 1i)]; poles_uv = [2*pi*freqs_res_uv*(xi + 1i), 2*pi*freqs_res_uv*(xi - 1i)];
We then define the weight that will be used for the fitting. Basically, we want more weight around the resonance and at low frequency (below the first resonance). Also, we want more importance where we have a better coherence.
weight_Uch_Vph = coh_Uch_Vph'; weight_Uch_Vpv = coh_Uch_Vpv'; weight_Ucv_Vph = coh_Ucv_Vph'; weight_Ucv_Vpv = coh_Ucv_Vpv'; alpha = 0.1; for freq_i = 1:length(freqs_res) weight_Uch_Vph(f>(1-alpha)*freqs_res_uh(freq_i) & f<(1 + alpha)*freqs_res_uh(freq_i)) = 10; weight_Uch_Vpv(f>(1-alpha)*freqs_res_uh(freq_i) & f<(1 + alpha)*freqs_res_uh(freq_i)) = 10; weight_Ucv_Vph(f>(1-alpha)*freqs_res_uv(freq_i) & f<(1 + alpha)*freqs_res_uv(freq_i)) = 10; weight_Ucv_Vpv(f>(1-alpha)*freqs_res_uv(freq_i) & f<(1 + alpha)*freqs_res_uv(freq_i)) = 10; end
Ignore data above some frequency.
weight_Uch_Vph(f>1000) = 0; weight_Uch_Vpv(f>1000) = 0; weight_Ucv_Vph(f>1000) = 0; weight_Ucv_Vpv(f>1000) = 0;

When we set some options for vfit3.
opts = struct(); opts.stable = 1; % Enforce stable poles opts.asymp = 1; % Force D matrix to be null opts.relax = 1; % Use vector fitting with relaxed non-triviality constraint opts.skip_pole = 0; % Do NOT skip pole identification opts.skip_res = 0; % Do NOT skip identification of residues (C,D,E) opts.cmplx_ss = 0; % Create real state space model with block diagonal A opts.spy1 = 0; % No plotting for first stage of vector fitting opts.spy2 = 0; % Create magnitude plot for fitting of f(s)
We define the number of iteration.
Niter = 5;
An we run the vectfit3 algorithm.
for iter = 1:Niter [SER_Uch_Vph, poles, ~, fit_Uch_Vph] = vectfit3(tf_Uch_Vph.', 1i*2*pi*f, poles_uh, weight_Uch_Vph, opts); end for iter = 1:Niter [SER_Uch_Vpv, poles, ~, fit_Uch_Vpv] = vectfit3(tf_Uch_Vpv.', 1i*2*pi*f, poles_uh, weight_Uch_Vpv, opts); end for iter = 1:Niter [SER_Ucv_Vph, poles, ~, fit_Ucv_Vph] = vectfit3(tf_Ucv_Vph.', 1i*2*pi*f, poles_uv, weight_Ucv_Vph, opts); end for iter = 1:Niter [SER_Ucv_Vpv, poles, ~, fit_Ucv_Vpv] = vectfit3(tf_Ucv_Vpv.', 1i*2*pi*f, poles_uv, weight_Ucv_Vpv, opts); end


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
And finally, we create the identified state space model:
G_uh_xh = minreal(ss(full(SER_uh_xh.A),SER_uh_xh.B,SER_uh_xh.C,SER_uh_xh.D)); G_uv_xh = minreal(ss(full(SER_uv_xh.A),SER_uv_xh.B,SER_uv_xh.C,SER_uv_xh.D)); G_uh_xv = minreal(ss(full(SER_uh_xv.A),SER_uh_xv.B,SER_uh_xv.C,SER_uh_xv.D)); G_uv_xv = minreal(ss(full(SER_uv_xv.A),SER_uv_xv.B,SER_uv_xv.C,SER_uv_xv.D)); G = [G_uh_xh, G_uv_xh; G_uh_xv, G_uv_xv];
save('mat/plant.mat', 'G');
3 Sensor Noise
4 Plant Analysis
4.1 Load Plant
load('mat/plant.mat', 'G');
4.2 RGA-Number
freqs = logspace(2, 4, 1000); G_resp = freqresp(G, freqs, 'Hz'); A = zeros(size(G_resp)); RGAnum = zeros(1, length(freqs)); for i = 1:length(freqs) A(:, :, i) = G_resp(:, :, i).*inv(G_resp(:, :, i))'; RGAnum(i) = sum(sum(abs(A(:, :, i)-eye(2)))); end % RGA = G0.*inv(G0)';
figure; plot(freqs, RGAnum); set(gca, 'xscale', 'log');
U = zeros(2, 2, length(freqs)); S = zeros(2, 2, length(freqs)) V = zeros(2, 2, length(freqs)); for i = 1:length(freqs) [Ui, Si, Vi] = svd(G_resp(:, :, i)); U(:, :, i) = Ui; S(:, :, i) = Si; V(:, :, i) = Vi; end
4.3 Rotation Matrix
G0 = freqresp(G, 0);
5 Control Objective
The maximum expected stroke is \(y_\text{max} = 3mm \approx 5e^{-2} rad\) at \(1Hz\). The maximum wanted error is \(e_\text{max} = 10 \mu rad\).
Thus, we require the sensitivity function at \(\omega_0 = 1\text{ Hz}\):
\begin{align*} |S(j\omega_0)| &< \left| \frac{e_\text{max}}{y_\text{max}} \right| \\ &< 2 \cdot 10^{-4} \end{align*}In terms of loop gain, this is equivalent to: \[ |L(j\omega_0)| > 5 \cdot 10^{3} \]
6 Plant Scaling
- measured noise
- expected perturbations
- maximum input usage
- maximum wanted error