Encoder - Test Bench
Table of Contents
1 Experimental Setup
The experimental Setup is schematically represented in Figure 1.
The mass can be vertically moved using the amplified piezoelectric actuator. The displacement of the mass (relative to the mechanical frame) is measured both by the interferometer and by the encoder.
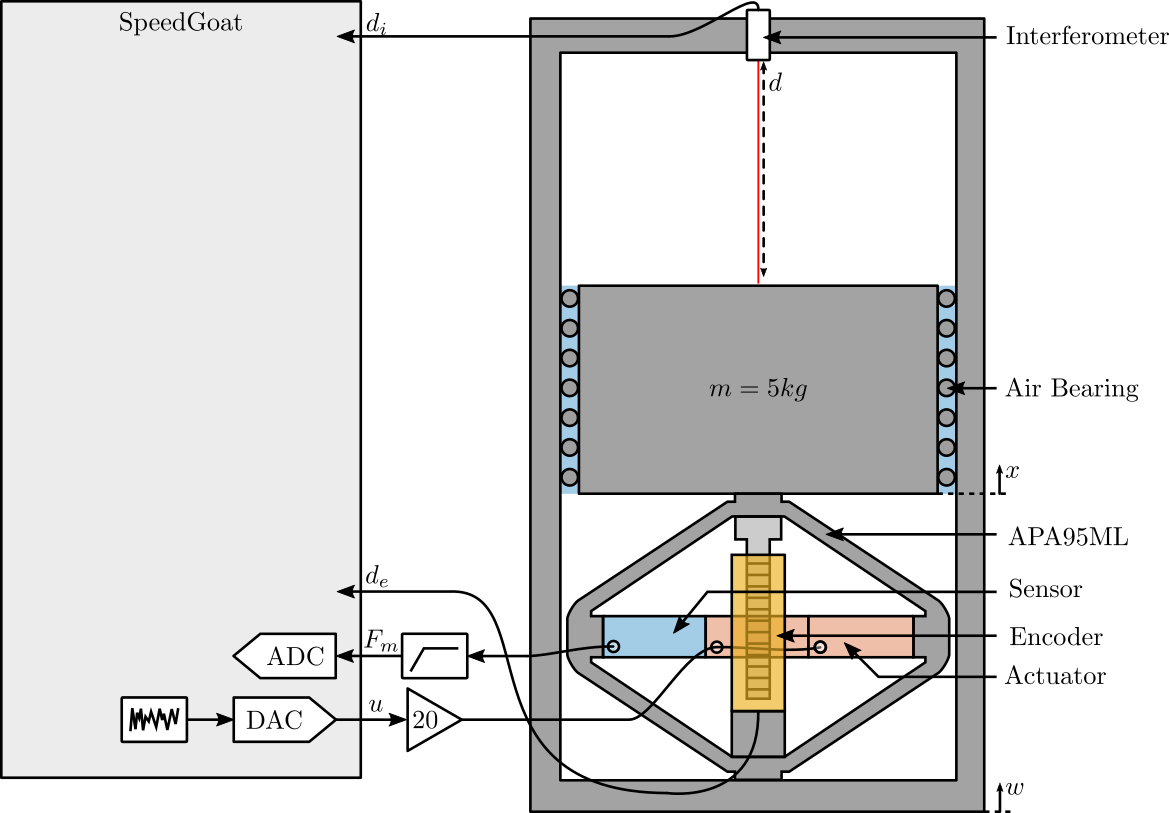
Figure 1: Schematic of the Experiment
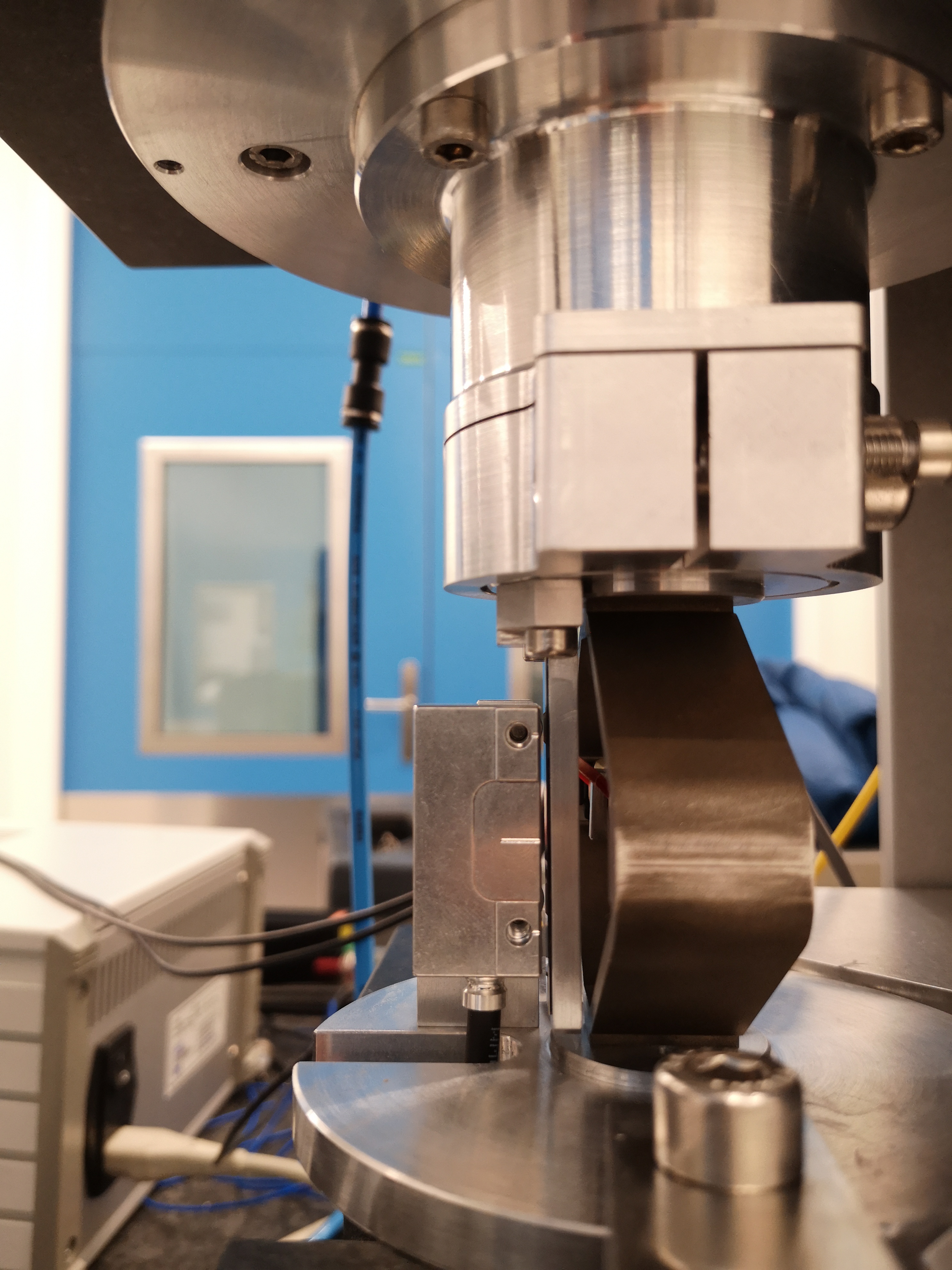
Figure 2: Side View of the encoder
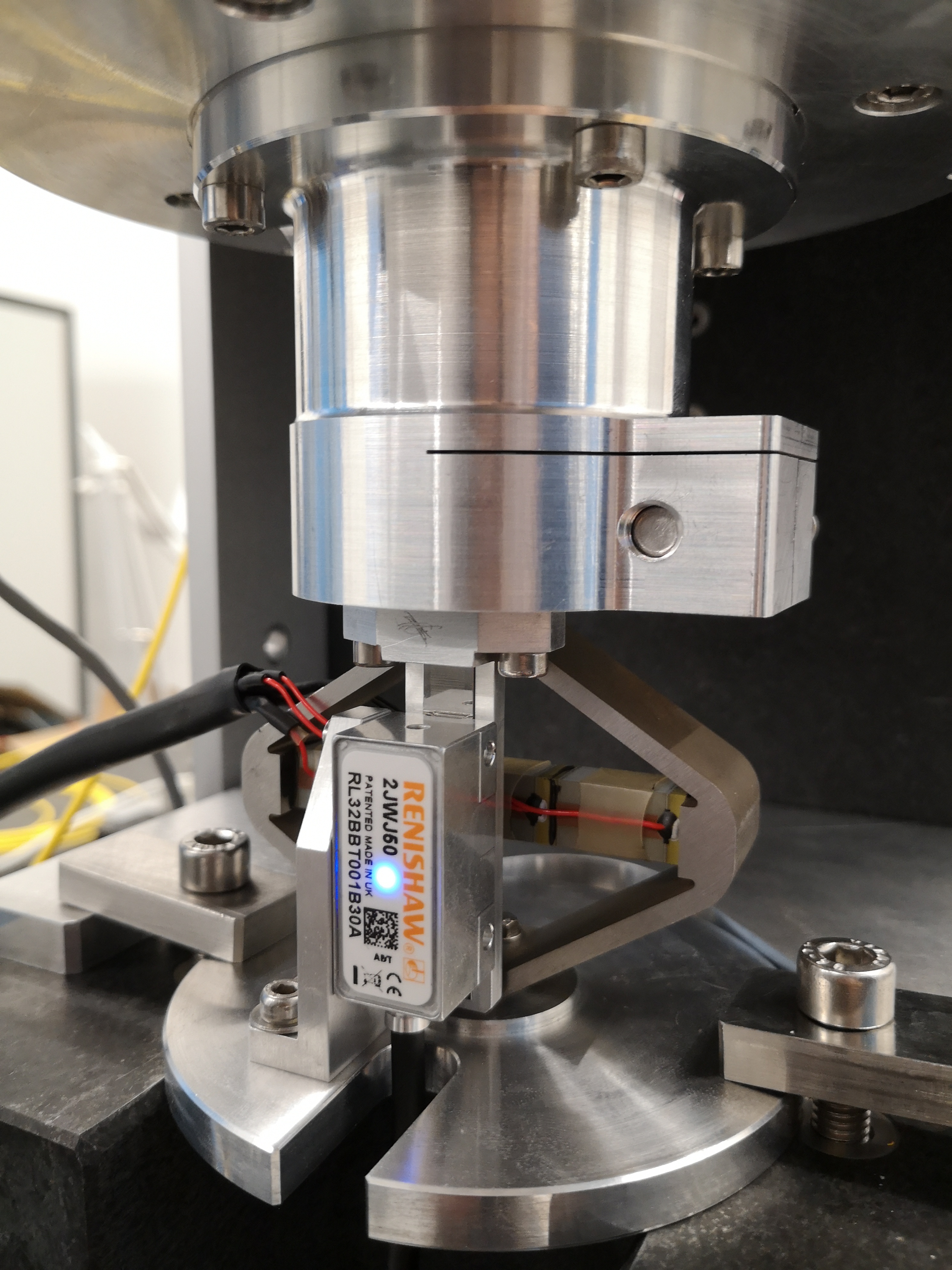
Figure 3: Front View of the encoder
2 Huddle Test
The goal in this section is the estimate the noise of both the encoder and the intereferometer.
Nothing is then to the actuator such that the relative motion between the mass and the frame is as small as possible. Ideally, a mechanical part would clamp the two together, we here suppose that the APA is still enough to clamp the two together.
2.1 Load Data
load('mat/int_enc_huddle_test.mat', 'interferometer', 'encoder', 't');
interferometer = detrend(interferometer, 0); encoder = detrend(encoder, 0);
2.2 Time Domain Results
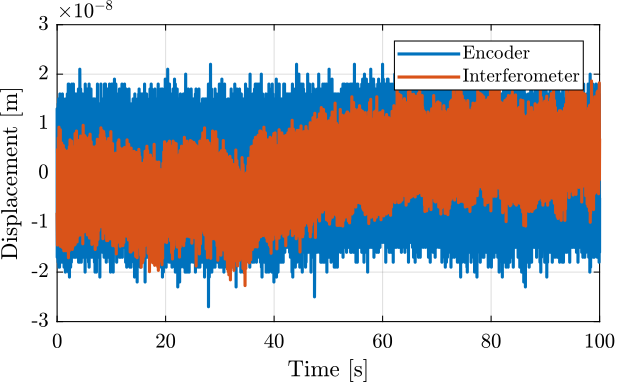
Figure 4: Huddle test - Time domain signals
G_lpf = 1/(1 + s/2/pi/10);
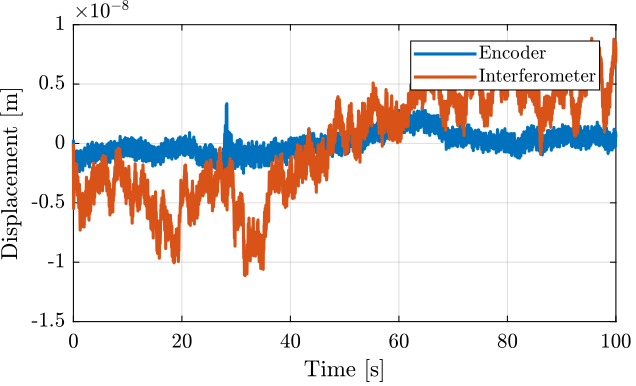
Figure 5: Huddle test - Time domain signals filtered with a LPF at 10Hz
2.3 Frequency Domain Noise
Ts = 1e-4; win = hann(ceil(10/Ts)); [p_i, f] = pwelch(interferometer, win, [], [], 1/Ts); [p_e, ~] = pwelch(encoder, win, [], [], 1/Ts);
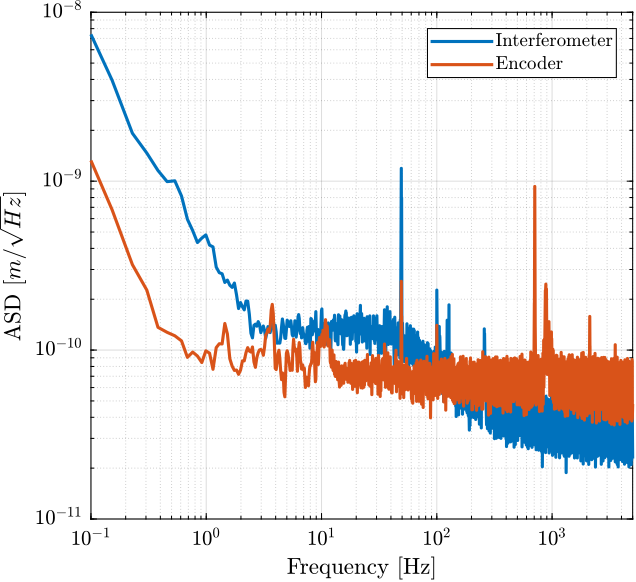
Figure 6: Amplitude Spectral Density of the signals during the Huddle test
3 Comparison Interferometer / Encoder
The goal here is to make sure that the interferometer and encoder measurements are coherent. We may see non-linearity in the interferometric measurement.
3.1 Load Data
load('mat/int_enc_comp.mat', 'interferometer', 'encoder', 'u', 't');
interferometer = detrend(interferometer, 0); encoder = detrend(encoder, 0); u = detrend(u, 0);
3.2 Time Domain Results
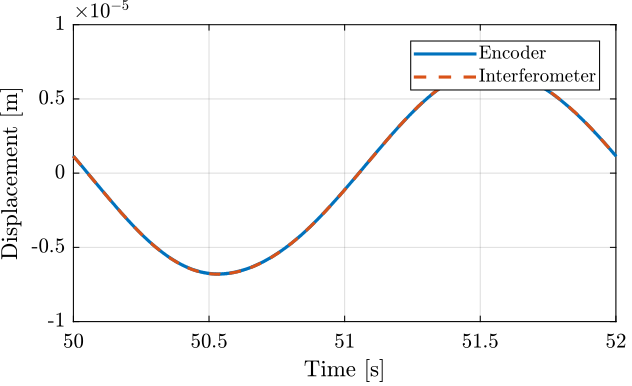
Figure 7: One cycle measurement
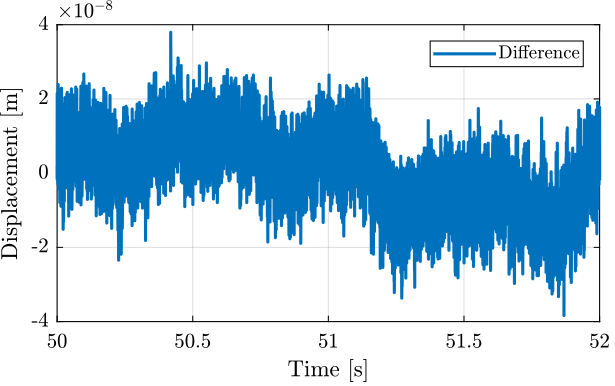
Figure 8: Difference between the Encoder and the interferometer during one cycle
3.3 Difference between Encoder and Interferometer as a function of time
Ts = 1e-4; d_i_mean = reshape(interferometer, [2/Ts floor(Ts/2*length(interferometer))]); d_e_mean = reshape(encoder, [2/Ts floor(Ts/2*length(encoder))]);
w0 = 2*pi*5; % [rad/s] xi = 0.7; G_lpf = 1/(1 + 2*xi/w0*s + s^2/w0^2); d_err_mean = reshape(lsim(G_lpf, encoder - interferometer, t), [2/Ts floor(Ts/2*length(encoder))]); d_err_mean = d_err_mean - mean(d_err_mean);
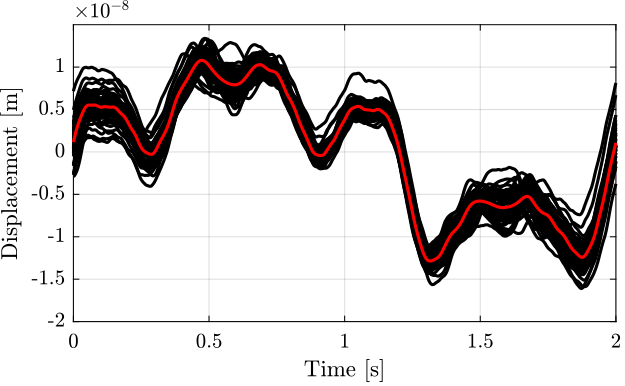
Figure 9: Difference between the two measurement in the time domain, averaged for all the cycles
3.4 Difference between Encoder and Interferometer as a function of position
Compute the mean of the interferometer measurement corresponding to each of the encoder measurement.
[e_sorted, ~, e_ind] = unique(encoder); i_mean = zeros(length(e_sorted), 1); for i = 1:length(e_sorted) i_mean(i) = mean(interferometer(e_ind == i)); end i_mean_error = (i_mean - e_sorted);
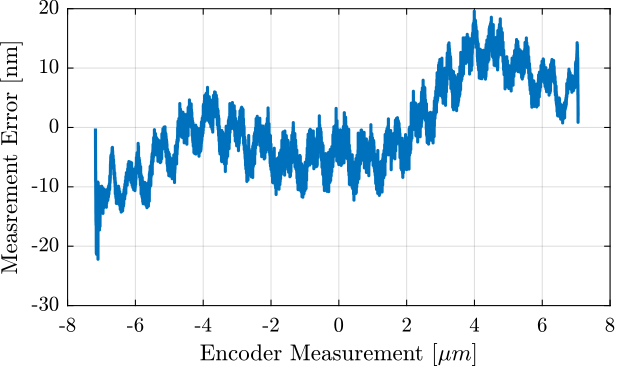
Figure 10: Difference between the two measurement as a function of the measured position by the encoder, averaged for all the cycles
The period of the non-linearity seems to be \(1.53 \mu m\) which corresponds to the wavelength of the Laser.
win_length = 1530; % length of the windows (corresponds to 1.53 um) num_avg = floor(length(e_sorted)/win_length); % number of averaging i_init = ceil((length(e_sorted) - win_length*num_avg)/2); % does not start at the extremity e_sorted_mean_over_period = mean(reshape(i_mean_error(i_init:i_init+win_length*num_avg-1), [win_length num_avg]), 2);

Figure 11: Non-Linearity of the Interferometer over the period of the wavelength
4 Identification
4.1 Load Data
load('mat/int_enc_id_noise_bis.mat', 'interferometer', 'encoder', 'u', 't');
interferometer = detrend(interferometer, 0); encoder = detrend(encoder, 0); u = detrend(u, 0);
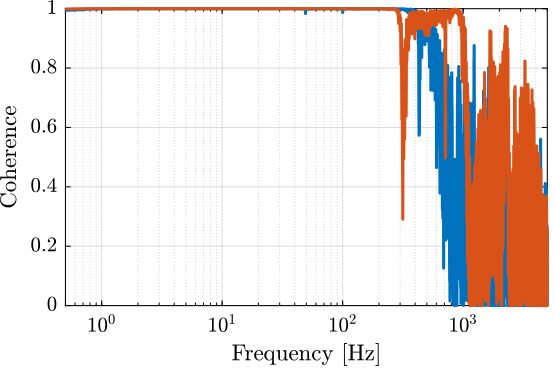
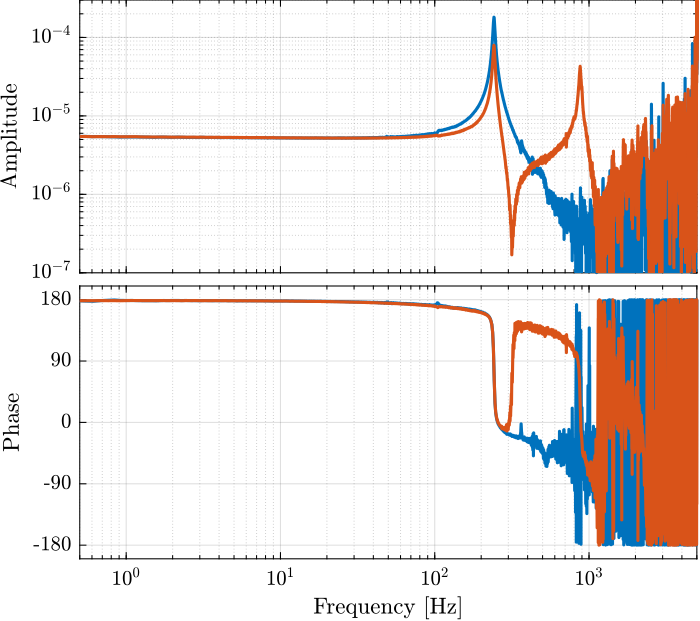
4.2 Identification
Ts = 1e-4; % Sampling Time [s] win = hann(ceil(10/Ts));
[tf_i_est, f] = tfestimate(u, interferometer, win, [], [], 1/Ts); [co_i_est, ~] = mscohere(u, interferometer, win, [], [], 1/Ts); [tf_e_est, ~] = tfestimate(u, encoder, win, [], [], 1/Ts); [co_e_est, ~] = mscohere(u, encoder, win, [], [], 1/Ts);