Encoder - Test Bench
Table of Contents
1 Experimental Setup
The experimental Setup is schematically represented in Figure 1.
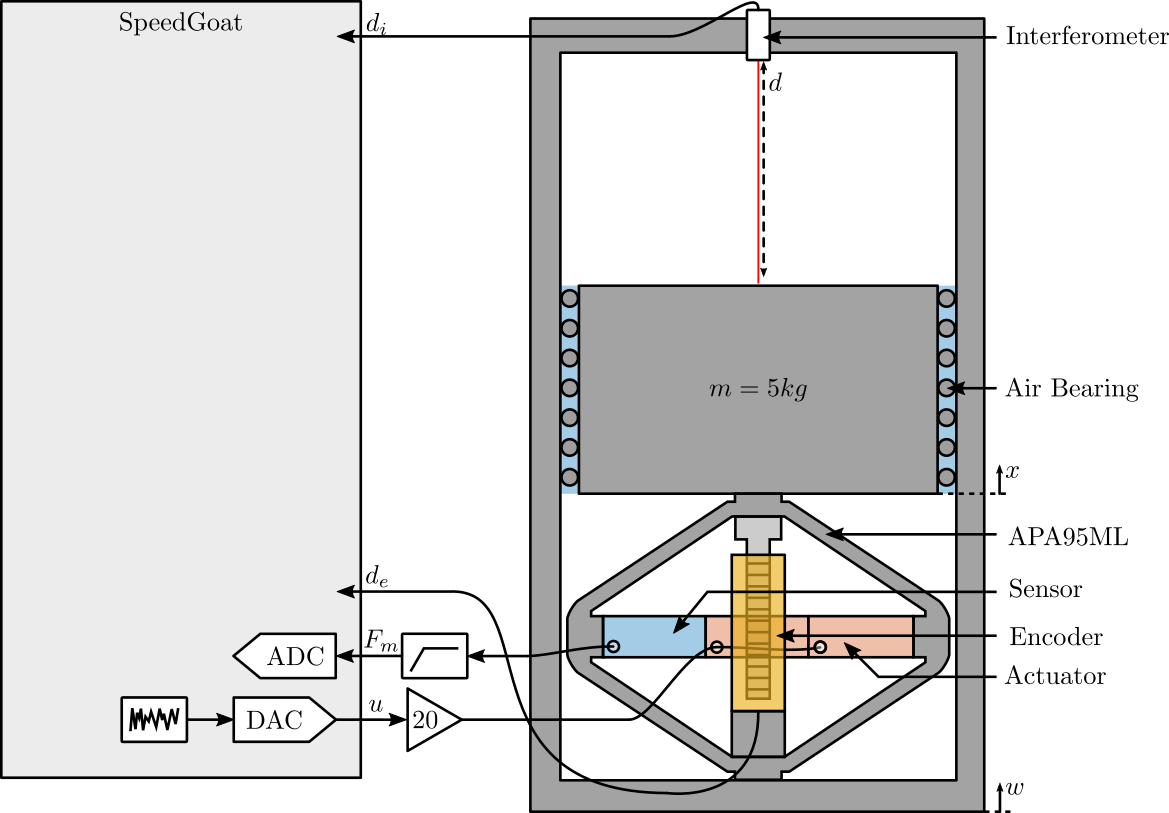
Figure 1: Schematic of the Experiment
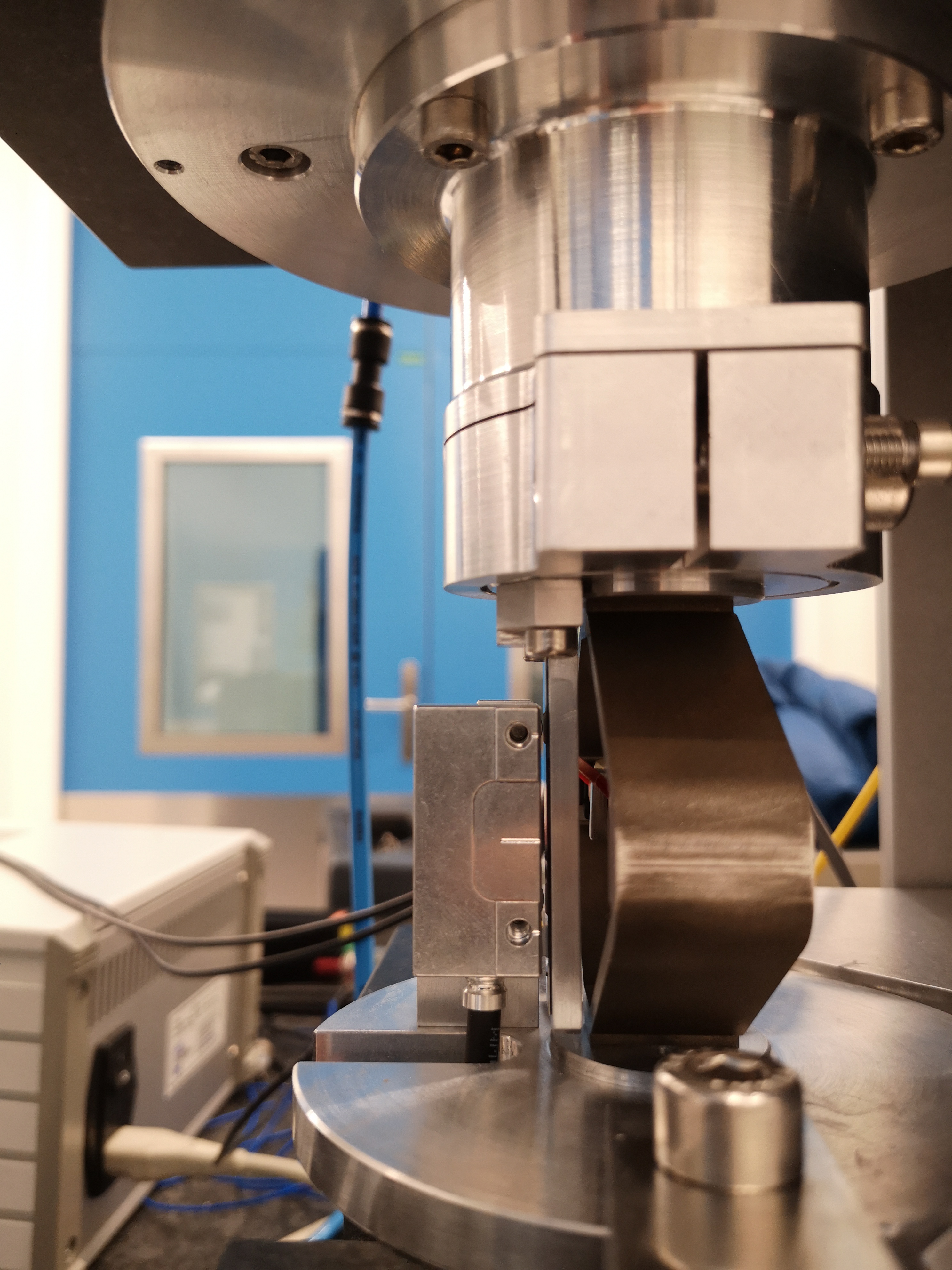
Figure 2: Side View of the encoder

Figure 3: Front View of the encoder
2 Huddle Test
The goal in this section is the estimate the noise of both the encoder and the intereferometer.
2.1 Load Data
load('mat/int_enc_huddle_test.mat', 'interferometer', 'encoder', 't');
interferometer = detrend(interferometer, 0); encoder = detrend(encoder, 0);
2.2 Time Domain Results
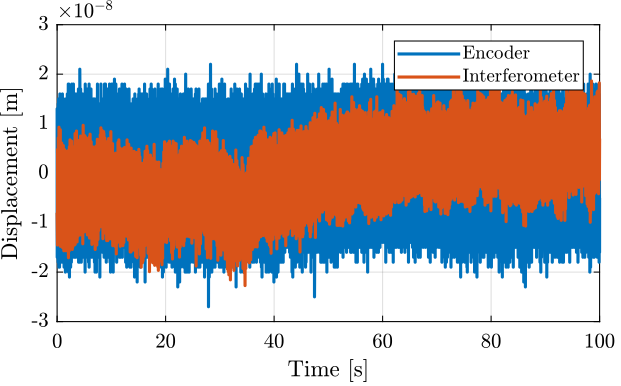
Figure 4: Huddle test - Time domain signals
G_lpf = 1/(1 + s/2/pi/10);
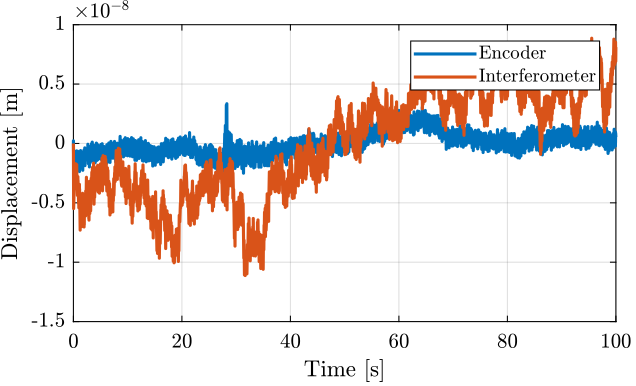
Figure 5: Huddle test - Time domain signals filtered with a LPF at 10Hz
2.3 Frequency Domain Noise
Ts = 1e-4; win = hann(ceil(10/Ts)); [p_i, f] = pwelch(interferometer, win, [], [], 1/Ts); [p_e, ~] = pwelch(encoder, win, [], [], 1/Ts);
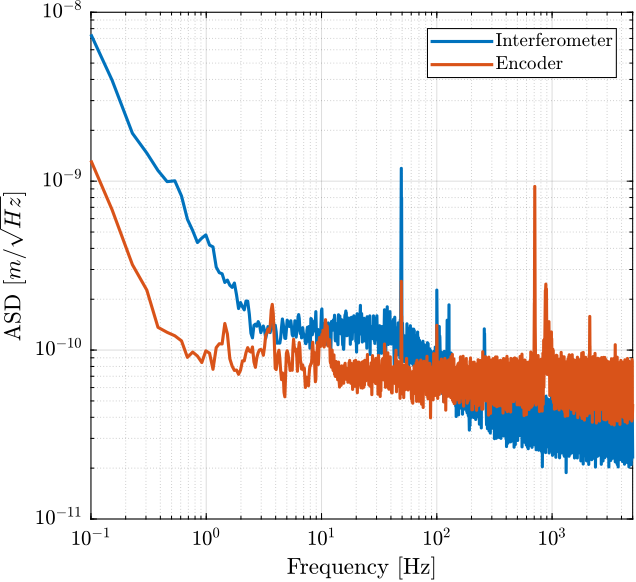
Figure 6: Amplitude Spectral Density of the signals during the Huddle test
3 Comparison Interferometer / Encoder
The goal here is to make sure that the interferometer and encoder measurements are coherent. We may see non-linearity in the interferometric measurement.
3.1 Load Data
load('mat/int_enc_comp.mat', 'interferometer', 'encoder', 'u', 't');
interferometer = detrend(interferometer, 0); encoder = detrend(encoder, 0); u = detrend(u, 0);
3.2 Time Domain Results
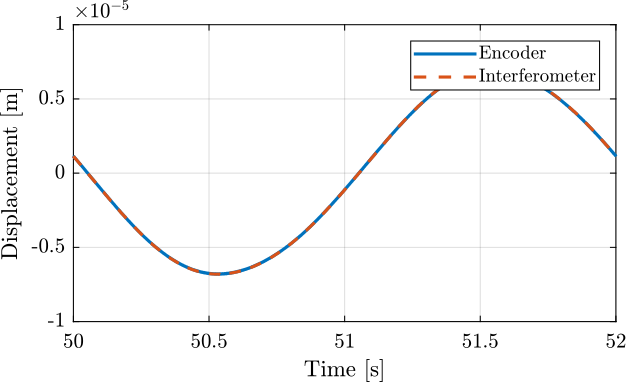
Figure 7: One cycle measurement

Figure 8: Difference between the Encoder and the interferometer during one cycle
3.3 Difference between Encoder and Interferometer as a function of time
Ts = 1e-4; d_i_mean = reshape(interferometer, [2/Ts floor(Ts/2*length(interferometer))]); d_e_mean = reshape(encoder, [2/Ts floor(Ts/2*length(encoder))]);
w0 = 2*pi*5; % [rad/s] xi = 0.7; G_lpf = 1/(1 + 2*xi/w0*s + s^2/w0^2); d_err_mean = reshape(lsim(G_lpf, encoder - interferometer, t), [2/Ts floor(Ts/2*length(encoder))]); d_err_mean = d_err_mean - mean(d_err_mean);
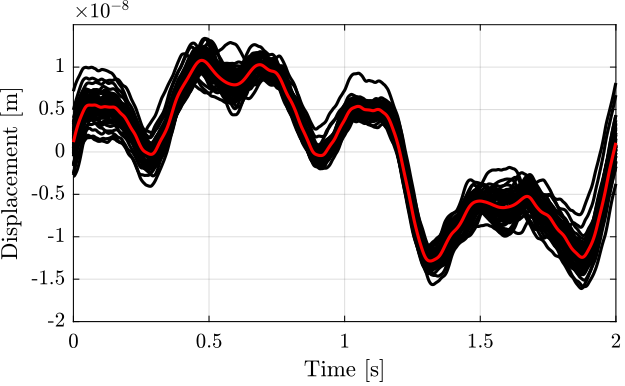
Figure 9: Difference between the two measurement in the time domain, averaged for all the cycles
3.4 Difference between Encoder and Interferometer as a function of position
Compute the mean of the interferometer measurement corresponding to each of the encoder measurement.
[e_sorted, ~, e_ind] = unique(encoder); i_mean = zeros(length(e_sorted), 1); for i = 1:length(e_sorted) i_mean(i) = mean(interferometer(e_ind == i)); end i_mean_error = (i_mean - e_sorted);
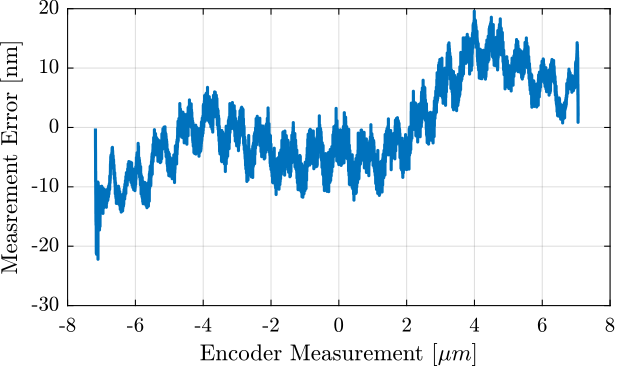
Figure 10: Difference between the two measurement as a function of the measured position by the encoder, averaged for all the cycles
The period of the non-linearity seems to be \(1.53 \mu m\) which corresponds to the wavelength of the Laser.
win_length = 1530; % length of the windows (corresponds to 1.53 um) num_avg = floor(length(e_sorted)/win_length); % number of averaging i_init = ceil((length(e_sorted) - win_length*num_avg)/2); % does not start at the extremity e_sorted_mean_over_period = mean(reshape(i_mean_error(i_init:i_init+win_length*num_avg-1), [win_length num_avg]), 2);
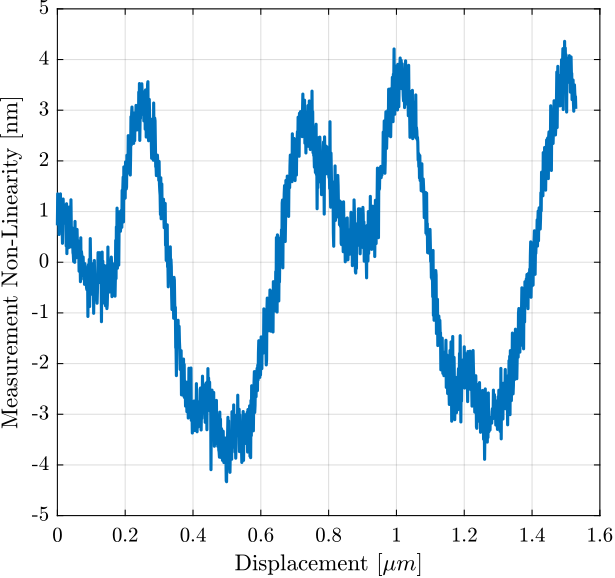
Figure 11: Non-Linearity of the Interferometer over the period of the wavelength
4 Identification
4.1 Load Data
load('mat/int_enc_id_noise_bis.mat', 'interferometer', 'encoder', 'u', 't');
interferometer = detrend(interferometer, 0); encoder = detrend(encoder, 0); u = detrend(u, 0);
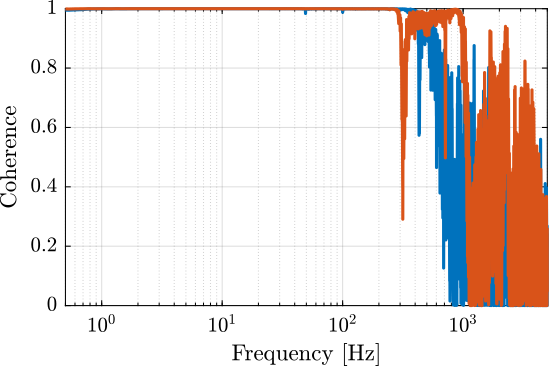
4.2 Identification
Ts = 1e-4; % Sampling Time [s] win = hann(ceil(10/Ts));
[tf_i_est, f] = tfestimate(u, interferometer, win, [], [], 1/Ts); [co_i_est, ~] = mscohere(u, interferometer, win, [], [], 1/Ts); [tf_e_est, ~] = tfestimate(u, encoder, win, [], [], 1/Ts); [co_e_est, ~] = mscohere(u, encoder, win, [], [], 1/Ts);