Designing Complementary filters for sensor fusion using \(\mathcal{H}_\infty\) synthesis - Matlab Computation
Table of Contents
This report is also available as a pdf.
The present document is a companion file for the journal paper (Dehaeze, Vermat, and Collette 2021). All the Matlab (MATLAB 2020) scripts used in the paper are here shared and explained.
This document is divided into the following sections also corresponding to the paper sections:
- Section 1: the shaping of complementary filters is written as an \(\mathcal{H}_\infty\) optimization problem using weighting functions. The weighting function design is discussed and the method is applied for the design of a set of simple complementary filters.
- Section 2: the effectiveness of the proposed complementary filter synthesis strategy is demonstrated by designing complex complementary filters used in the first isolation stage at the LIGO
- Section 3: complementary filters are designed using the classical feedback loop
- Section 4: the proposed design method is generalized for the design of a set of three complementary filters
- Section 5: complete Matlab scripts and functions developed are listed
1. H-Infinity synthesis of complementary filters
1.1. Synthesis Architecture
In order to generate two complementary filters with a wanted shape, the generalized plant of Figure 1 can be used. The included weights \(W_1(s)\) and \(W_2(s)\) are used to specify the upper bounds of the complementary filters being generated.

Figure 1: Generalized plant used for the \(\mathcal{H}_\infty\) synthesis of a set of two complementary fiters
Applied the standard \(\mathcal{H}_\infty\) synthesis on this generalized plant will give a transfer function \(H_2(s)\) (see Figure 2) such that the \(\mathcal{H}_\infty\) norm of the transfer function from \(w\) to \([z_1,\ z_2]\) is less than one \eqref{eq:h_inf_objective}.

Figure 2: Generalized plant with the synthesized filter obtained after the \(\mathcal{H}_\infty\) synthesis
Thus, if the synthesis is successful and the above condition is verified, we can define \(H_1(s)\) to be the complementary of \(H_2(s)\) \eqref{eq:H1_complementary_of_H2} and we have condition \eqref{eq:shaping_comp_filters} verified.
\begin{equation} H_1(s) = 1 - H_2(s) \label{eq:H1_complementary_of_H2} \end{equation} \begin{equation} \left\| \begin{array}{c} H_1(s) W_1(s) \\ H_2(s) W_2(s) \end{array} \right\|_\infty < 1 \quad \Longrightarrow \quad \left\{ \begin{array}{c} |H_1(j\omega)| < \frac{1}{|W_1(j\omega)|}, \quad \forall \omega \\ |H_2(j\omega)| < \frac{1}{|W_2(j\omega)|}, \quad \forall \omega \end{array} \right. \label{eq:shaping_comp_filters} \end{equation}We then see that \(W_1(s)\) and \(W_2(s)\) can be used to set the wanted upper bounds of the magnitudes of both \(H_1(s)\) and \(H_2(s)\).
The presented synthesis method therefore allows to shape two filters \(H_1(s)\) and \(H_2(s)\) \eqref{eq:shaping_comp_filters} while ensuring their complementary property \eqref{eq:H1_complementary_of_H2}.
The complete Matlab script for this part is given in Section 5.1.
1.2. Design of Weighting Function - Proposed formula
A formula is proposed to help the design of the weighting functions:
\begin{equation} W(s) = \left( \frac{ \frac{1}{\omega_0} \sqrt{\frac{1 - \left(\frac{G_0}{G_c}\right)^{\frac{2}{n}}}{1 - \left(\frac{G_c}{G_\infty}\right)^{\frac{2}{n}}}} s + \left(\frac{G_0}{G_c}\right)^{\frac{1}{n}} }{ \left(\frac{1}{G_\infty}\right)^{\frac{1}{n}} \frac{1}{\omega_0} \sqrt{\frac{1 - \left(\frac{G_0}{G_c}\right)^{\frac{2}{n}}}{1 - \left(\frac{G_c}{G_\infty}\right)^{\frac{2}{n}}}} s + \left(\frac{1}{G_c}\right)^{\frac{1}{n}} }\right)^n \label{eq:weighting_function_formula} \end{equation}The parameters permits to specify:
- the low frequency gain: \(G_0 = lim_{\omega \to 0} |W(j\omega)|\)
- the high frequency gain: \(G_\infty = lim_{\omega \to \infty} |W(j\omega)|\)
- the absolute gain at \(\omega_0\): \(G_c = |W(j\omega_0)|\)
- the absolute slope between high and low frequency: \(n\)
The general shape of a weighting function generated using the formula is shown in figure 3.

Figure 3: Magnitude of the weighting function generated using formula \eqref{eq:weighting_function_formula}
1.3. Weighting functions for the design of two complementary filters
The weighting function formula \eqref{eq:weighting_function_formula} is used to generate the upper bounds of two complementary filters that we wish to design.
The matlab function generateWF is described in Section 5.5.
%% Design of the Weighting Functions W1 = generateWF('n', 3, 'w0', 2*pi*10, 'G0', 1000, 'Ginf', 1/10, 'Gc', 0.45); W2 = generateWF('n', 2, 'w0', 2*pi*10, 'G0', 1/10, 'Ginf', 1000, 'Gc', 0.45);
The inverse magnitude of these two weighting functions are shown in Figure 4.

Figure 4: Inverse magnitude of the design weighting functions
1.4. Synthesis of the complementary filters
The generalized plant of Figure 1 is defined as follows:
%% Generalized Plant P = [W1 -W1; 0 W2; 1 0];
And the \(\mathcal{H}_\infty\) synthesis is performed using the hinfsyn command.
%% H-Infinity Synthesis [H2, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
[H2, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
Test bounds: 0.3223 <= gamma <= 1000
gamma X>=0 Y>=0 rho(XY)<1 p/f
1.795e+01 1.4e-07 0.0e+00 1.481e-16 p
2.406e+00 1.4e-07 0.0e+00 3.604e-15 p
8.806e-01 -3.1e+02 # -1.4e-16 7.370e-19 f
1.456e+00 1.4e-07 0.0e+00 1.499e-18 p
1.132e+00 1.4e-07 0.0e+00 8.587e-15 p
9.985e-01 1.4e-07 0.0e+00 2.331e-13 p
9.377e-01 -7.7e+02 # -6.6e-17 3.744e-14 f
9.676e-01 -2.0e+03 # -5.7e-17 1.046e-13 f
9.829e-01 -6.6e+03 # -1.1e-16 2.949e-13 f
9.907e-01 1.4e-07 0.0e+00 2.374e-19 p
9.868e-01 -1.6e+04 # -6.4e-17 5.331e-14 f
9.887e-01 -5.1e+04 # -1.5e-17 2.703e-19 f
9.897e-01 1.4e-07 0.0e+00 1.583e-11 p
Limiting gains...
9.897e-01 1.5e-07 0.0e+00 1.183e-12 p
9.897e-01 6.9e-07 0.0e+00 1.365e-12 p
Best performance (actual): 0.9897
As shown above, the obtained \(\mathcal{H}_\infty\) norm of the transfer function from \(w\) to \([z_1,\ z_2]\) is found to be less than one meaning the synthesis is successful.
We then define the filter \(H_1(s)\) to be the complementary of \(H_2(s)\) \eqref{eq:H1_complementary_of_H2}.
%% Define H1 to be the complementary of H2 H1 = 1 - H2;
The function generateCF can also be used to synthesize the complementary filters.
This function is described in Section 5.6.
[H1, H2] = generateCF(W1, W2);
1.5. Obtained Complementary Filters
The obtained complementary filters are shown below and are found to be of order 5. Their bode plots are shown in figure 5 and compare with the defined upper bounds.
zpk(H1)
ans =
(s+1.289e05) (s+153.6) (s+3.842)^3
-------------------------------------------------------
(s+1.29e05) (s^2 + 102.1s + 2733) (s^2 + 69.45s + 3272)
zpk(H2)
ans =
125.61 (s+3358)^2 (s^2 + 46.61s + 813.8)
-------------------------------------------------------
(s+1.29e05) (s^2 + 102.1s + 2733) (s^2 + 69.45s + 3272)

Figure 5: Obtained complementary filters using \(\mathcal{H}_\infty\) synthesis
2. Design of complementary filters used in the Active Vibration Isolation System at the LIGO
In this section, the proposed method for the design of complementary filters is validated for the design of a set of two complex complementary filters used for the first isolation stage at the LIGO (Hua, Adhikari, et al. 2004).
The complete Matlab script for this part is given in Section 5.2.
2.1. Specifications
The specifications for the set of complementary filters (\(L_1,H_1\)) used at the LIGO are summarized below (for further details, refer to (Hua, Debra, et al. 2004)):
- From 0 to 0.008 Hz, the magnitude \(|L_1(j\omega)|\) should be less or equal to \(8 \times 10^{-4}\)
- Between 0.008 Hz to 0.04 Hz, the filter \(L_1(s)\) should attenuate the input signal proportional to frequency cubed
- Between 0.04 Hz to 0.1 Hz, the magnitude \(|L_1(j\omega)|\) should be less than \(3\)
- Above 0.1 Hz, the magnitude \(|H_1(j\omega)|\) should be less than \(0.045\)
The specifications are translated into upper bounds of the complementary filters and are shown in Figure 6.
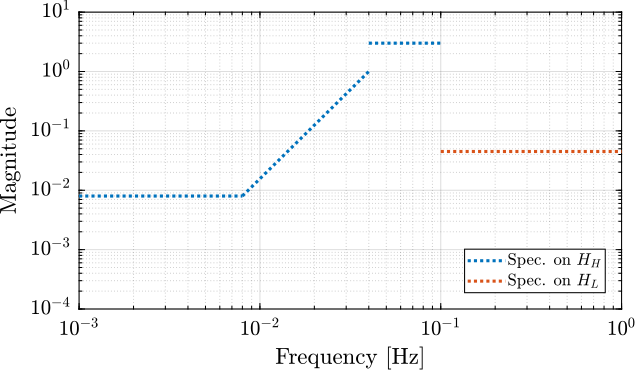
Figure 6: Specification for the LIGO complementary filters
2.2. FIR Filter
To replicated the complementary filters developed in (Hua, Adhikari, et al. 2004), the CVX Matlab toolbox (Grant and Boyd 2014) is used.
The CVX toolbox is initialized and the SeDuMi solver (Sturm 1999) is used.
%% Initialized CVX
cvx_startup;
cvx_solver sedumi;
We define the frequency vectors on which we will constrain the norm of the FIR filter.
%% Frequency vectors w1 = 0:4.06e-4:0.008; w2 = 0.008:4.06e-4:0.04; w3 = 0.04:8.12e-4:0.1; w4 = 0.1:8.12e-4:0.83;
The order \(n\) of the FIR filter is defined.
%% Filter order
n = 512;
%% Initialization of filter responses A1 = [ones(length(w1),1), cos(kron(w1'.*(2*pi),[1:n-1]))]; A2 = [ones(length(w2),1), cos(kron(w2'.*(2*pi),[1:n-1]))]; A3 = [ones(length(w3),1), cos(kron(w3'.*(2*pi),[1:n-1]))]; A4 = [ones(length(w4),1), cos(kron(w4'.*(2*pi),[1:n-1]))]; B1 = [zeros(length(w1),1), sin(kron(w1'.*(2*pi),[1:n-1]))]; B2 = [zeros(length(w2),1), sin(kron(w2'.*(2*pi),[1:n-1]))]; B3 = [zeros(length(w3),1), sin(kron(w3'.*(2*pi),[1:n-1]))]; B4 = [zeros(length(w4),1), sin(kron(w4'.*(2*pi),[1:n-1]))];
And the convex optimization is run.
%% Convex optimization cvx_begin variable y(n+1,1) % t maximize(-y(1)) for i = 1:length(w1) norm([0 A1(i,:); 0 B1(i,:)]*y) <= 8e-3; end for i = 1:length(w2) norm([0 A2(i,:); 0 B2(i,:)]*y) <= 8e-3*(2*pi*w2(i)/(0.008*2*pi))^3; end for i = 1:length(w3) norm([0 A3(i,:); 0 B3(i,:)]*y) <= 3; end for i = 1:length(w4) norm([[1 0]'- [0 A4(i,:); 0 B4(i,:)]*y]) <= y(1); end cvx_end h = y(2:end);
cvx_begin
variable y(n+1,1)
% t
maximize(-y(1))
for i = 1:length(w1)
norm([0 A1(i,:); 0 B1(i,:)]*y) <= 8e-3;
end
for i = 1:length(w2)
norm([0 A2(i,:); 0 B2(i,:)]*y) <= 8e-3*(2*pi*w2(i)/(0.008*2*pi))^3;
end
for i = 1:length(w3)
norm([0 A3(i,:); 0 B3(i,:)]*y) <= 3;
end
for i = 1:length(w4)
norm([[1 0]'- [0 A4(i,:); 0 B4(i,:)]*y]) <= y(1);
end
cvx_end
Calling SeDuMi 1.34: 4291 variables, 1586 equality constraints
For improved efficiency, SeDuMi is solving the dual problem.
------------------------------------------------------------
SeDuMi 1.34 (beta) by AdvOL, 2005-2008 and Jos F. Sturm, 1998-2003.
Alg = 2: xz-corrector, Adaptive Step-Differentiation, theta = 0.250, beta = 0.500
eqs m = 1586, order n = 3220, dim = 4292, blocks = 1073
nnz(A) = 1100727 + 0, nnz(ADA) = 1364794, nnz(L) = 683190
it : b*y gap delta rate t/tP* t/tD* feas cg cg prec
0 : 4.11E+02 0.000
1 : -2.58E+00 1.25E+02 0.000 0.3049 0.9000 0.9000 4.87 1 1 3.0E+02
2 : -2.36E+00 3.90E+01 0.000 0.3118 0.9000 0.9000 1.83 1 1 6.6E+01
3 : -1.69E+00 1.31E+01 0.000 0.3354 0.9000 0.9000 1.76 1 1 1.5E+01
4 : -8.60E-01 7.10E+00 0.000 0.5424 0.9000 0.9000 2.48 1 1 4.8E+00
5 : -4.91E-01 5.44E+00 0.000 0.7661 0.9000 0.9000 3.12 1 1 2.5E+00
6 : -2.96E-01 3.88E+00 0.000 0.7140 0.9000 0.9000 2.62 1 1 1.4E+00
7 : -1.98E-01 2.82E+00 0.000 0.7271 0.9000 0.9000 2.14 1 1 8.5E-01
8 : -1.39E-01 2.00E+00 0.000 0.7092 0.9000 0.9000 1.78 1 1 5.4E-01
9 : -9.99E-02 1.30E+00 0.000 0.6494 0.9000 0.9000 1.51 1 1 3.3E-01
10 : -7.57E-02 8.03E-01 0.000 0.6175 0.9000 0.9000 1.31 1 1 2.0E-01
11 : -5.99E-02 4.22E-01 0.000 0.5257 0.9000 0.9000 1.17 1 1 1.0E-01
12 : -5.28E-02 2.45E-01 0.000 0.5808 0.9000 0.9000 1.08 1 1 5.9E-02
13 : -4.82E-02 1.28E-01 0.000 0.5218 0.9000 0.9000 1.05 1 1 3.1E-02
14 : -4.56E-02 5.65E-02 0.000 0.4417 0.9045 0.9000 1.02 1 1 1.4E-02
15 : -4.43E-02 2.41E-02 0.000 0.4265 0.9004 0.9000 1.01 1 1 6.0E-03
16 : -4.37E-02 8.90E-03 0.000 0.3690 0.9070 0.9000 1.00 1 1 2.3E-03
17 : -4.35E-02 3.24E-03 0.000 0.3641 0.9164 0.9000 1.00 1 1 9.5E-04
18 : -4.34E-02 1.55E-03 0.000 0.4788 0.9086 0.9000 1.00 1 1 4.7E-04
19 : -4.34E-02 8.77E-04 0.000 0.5653 0.9169 0.9000 1.00 1 1 2.8E-04
20 : -4.34E-02 5.05E-04 0.000 0.5754 0.9034 0.9000 1.00 1 1 1.6E-04
21 : -4.34E-02 2.94E-04 0.000 0.5829 0.9136 0.9000 1.00 1 1 9.9E-05
22 : -4.34E-02 1.63E-04 0.015 0.5548 0.9000 0.0000 1.00 1 1 6.6E-05
23 : -4.33E-02 9.42E-05 0.000 0.5774 0.9053 0.9000 1.00 1 1 3.9E-05
24 : -4.33E-02 6.27E-05 0.000 0.6658 0.9148 0.9000 1.00 1 1 2.6E-05
25 : -4.33E-02 3.75E-05 0.000 0.5972 0.9187 0.9000 1.00 1 1 1.6E-05
26 : -4.33E-02 1.89E-05 0.000 0.5041 0.9117 0.9000 1.00 1 1 8.6E-06
27 : -4.33E-02 9.72E-06 0.000 0.5149 0.9050 0.9000 1.00 1 1 4.5E-06
28 : -4.33E-02 2.94E-06 0.000 0.3021 0.9194 0.9000 1.00 1 1 1.5E-06
29 : -4.33E-02 9.73E-07 0.000 0.3312 0.9189 0.9000 1.00 2 2 5.3E-07
30 : -4.33E-02 2.82E-07 0.000 0.2895 0.9063 0.9000 1.00 2 2 1.6E-07
31 : -4.33E-02 8.05E-08 0.000 0.2859 0.9049 0.9000 1.00 2 2 4.7E-08
32 : -4.33E-02 1.43E-08 0.000 0.1772 0.9059 0.9000 1.00 2 2 8.8E-09
iter seconds digits c*x b*y
32 49.4 6.8 -4.3334083581e-02 -4.3334090214e-02
|Ax-b| = 3.7e-09, [Ay-c]_+ = 1.1E-10, |x|= 1.0e+00, |y|= 2.6e+00
Detailed timing (sec)
Pre IPM Post
3.902E+00 4.576E+01 1.035E-02
Max-norms: ||b||=1, ||c|| = 3,
Cholesky |add|=0, |skip| = 0, ||L.L|| = 4.26267.
------------------------------------------------------------
Status: Solved
Optimal value (cvx_optval): -0.0433341
h = y(2:end);
Finally, the filter response is computed over the frequency vector defined and the result is shown on figure 7 which is very close to the filters obtain in (Hua, Adhikari, et al. 2004).
%% Combine the frequency vectors to form the obtained filter w = [w1 w2 w3 w4]; H = [exp(-j*kron(w'.*2*pi,[0:n-1]))]*h;

Figure 7: FIR Complementary filters obtain after convex optimization
2.3. Weighting function design
The weightings function that will be used for the \(\mathcal{H}_\infty\) synthesis of the complementary filters are now designed.
These weights will determine the order of the obtained filters.
Here are the requirements on the filters:
- reasonable order
- to be as close as possible to the specified upper bounds
- stable and minimum phase
The weighting function for the High Pass filter is defined as follows:
%% Design of the weight for the high pass filter w1 = 2*pi*0.008; x1 = 0.35; w2 = 2*pi*0.04; x2 = 0.5; w3 = 2*pi*0.05; x3 = 0.5; % Slope of +3 from w1 wH = 0.008*(s^2/w1^2 + 2*x1/w1*s + 1)*(s/w1 + 1); % Little bump from w2 to w3 wH = wH*(s^2/w2^2 + 2*x2/w2*s + 1)/(s^2/w3^2 + 2*x3/w3*s + 1); % No Slope at high frequencies wH = wH/(s^2/w3^2 + 2*x3/w3*s + 1)/(s/w3 + 1); % Little bump between w2 and w3 w0 = 2*pi*0.045; xi = 0.1; A = 2; n = 1; wH = wH*((s^2 + 2*w0*xi*A^(1/n)*s + w0^2)/(s^2 + 2*w0*xi*s + w0^2))^n; wH = 1/wH; wH = minreal(ss(wH));
And the weighting function for the Low pass filter is taken as a Chebyshev Type I filter.
%% Design of the weight for the low pass filter n = 20; % Filter order Rp = 1; % Peak to peak passband ripple Wp = 2*pi*0.102; % Edge frequency % Chebyshev Type I filter design [b,a] = cheby1(n, Rp, Wp, 'high', 's'); wL = 0.04*tf(a, b); wL = 1/wL; wL = minreal(ss(wL));
The inverse magnitude of the weighting functions are shown in Figure 8.
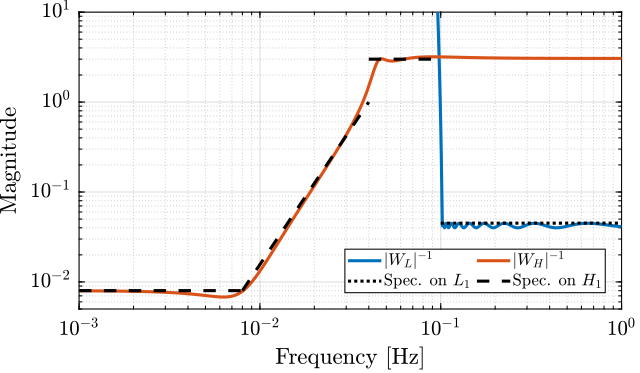
Figure 8: Weights for the \(\mathcal{H}_\infty\) synthesis
2.4. Synthesis of the complementary filters
The generalized plant of figure 1 is defined.
%% Generalized plant for the H-infinity Synthesis P = [0 wL; wH -wH; 1 0];
And the standard \(\mathcal{H}_\infty\) synthesis using the hinfsyn command is performed.
%% Standard H-Infinity synthesis [Hl, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
[Hl, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
Resetting value of Gamma min based on D_11, D_12, D_21 terms
Test bounds: 0.3276 < gamma <= 1.8063
gamma hamx_eig xinf_eig hamy_eig yinf_eig nrho_xy p/f
1.806 1.4e-02 -1.7e-16 3.6e-03 -4.8e-12 0.0000 p
1.067 1.3e-02 -4.2e-14 3.6e-03 -1.9e-12 0.0000 p
0.697 1.3e-02 -3.0e-01# 3.6e-03 -3.5e-11 0.0000 f
0.882 1.3e-02 -9.5e-01# 3.6e-03 -1.2e-34 0.0000 f
0.975 1.3e-02 -2.7e+00# 3.6e-03 -1.6e-12 0.0000 f
1.021 1.3e-02 -8.7e+00# 3.6e-03 -4.5e-16 0.0000 f
1.044 1.3e-02 -6.5e-14 3.6e-03 -3.0e-15 0.0000 p
1.032 1.3e-02 -1.8e+01# 3.6e-03 0.0e+00 0.0000 f
1.038 1.3e-02 -3.8e+01# 3.6e-03 0.0e+00 0.0000 f
1.041 1.3e-02 -8.3e+01# 3.6e-03 -2.9e-33 0.0000 f
1.042 1.3e-02 -1.9e+02# 3.6e-03 -3.4e-11 0.0000 f
1.043 1.3e-02 -5.3e+02# 3.6e-03 -7.5e-13 0.0000 f
Gamma value achieved: 1.0439
The obtained \(\mathcal{H}_\infty\) norm is found to be close than one meaning the synthesis is successful.
The high pass filter \(H_H(s)\) is defined to be the complementary of the synthesized low pass filter \(H_L(s)\):
\begin{equation} H_H(s) = 1 - H_L(s) \end{equation}%% High pass filter as the complementary of the low pass filter Hh = 1 - Hl;
The size of the filters is shown to be equal to the sum of the weighting functions orders.
size(Hh), size(Hl) State-space model with 1 outputs, 1 inputs, and 27 states. State-space model with 1 outputs, 1 inputs, and 27 states.
The magnitude of the obtained filters as well as the requirements are shown in Figure 9.
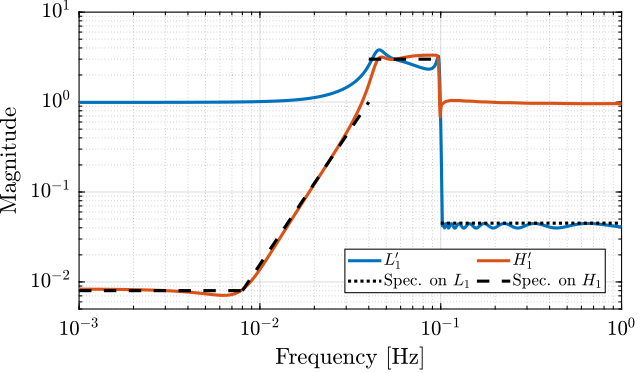
Figure 9: Obtained complementary filters using the \(\mathcal{H}_\infty\) synthesis
2.5. Comparison of the FIR filters and synthesized filters
Let’s now compare the FIR filters designed in (Hua, Adhikari, et al. 2004) with the with complementary filters obtained with the \(\mathcal{H}_\infty\) synthesis.
This is done in Figure 10, and both set of filters are found to be very close to each other.
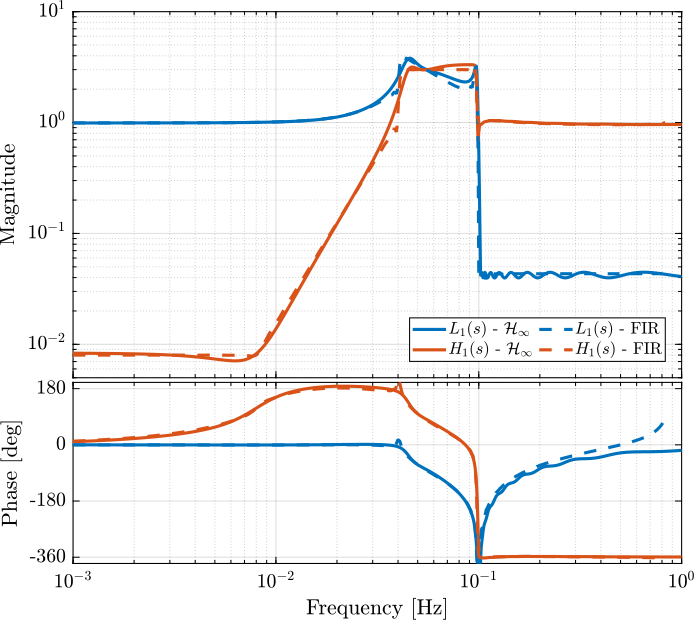
Figure 10: Comparison between the FIR filters developped for LIGO and the \(\mathcal{H}_\infty\) complementary filters
3. “Closed-Loop” complementary filters
In this section, the classical feedback architecture shown in Figure 11 is used for the design of complementary filters.

Figure 11: “Closed-Loop” complementary filters
The complete Matlab script for this part is given in Section 5.3.
3.1. Weighting Function design
Weighting functions using the generateWF Matlab function are designed to specify the upper bounds of the complementary filters to be designed.
These weighting functions are the same as the ones used in Section 1.3.
%% Design of the Weighting Functions W1 = generateWF('n', 3, 'w0', 2*pi*10, 'G0', 1000, 'Ginf', 1/10, 'Gc', 0.45); W2 = generateWF('n', 2, 'w0', 2*pi*10, 'G0', 1/10, 'Ginf', 1000, 'Gc', 0.45);
3.2. Generalized plant
The generalized plant of Figure 12 is defined below:
%% Generalized plant for "closed-loop" complementary filter synthesis P = [ W1 0 1; -W1 W2 -1];

Figure 12: Generalized plant used for the \(\mathcal{H}_\infty\) synthesis of “closed-loop” complementary filters
3.3. Synthesis of the closed-loop complementary filters
And the standard \(\mathcal{H}_\infty\) synthesis is performed.
%% Standard H-Infinity Synthesis [L, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
Test bounds: 0.3191 <= gamma <= 1.669
gamma X>=0 Y>=0 rho(XY)<1 p/f
7.299e-01 -1.5e-19 -2.4e+01 # 1.555e-18 f
1.104e+00 0.0e+00 1.6e-07 2.037e-19 p
8.976e-01 -3.2e-16 -1.4e+02 # 5.561e-16 f
9.954e-01 0.0e+00 1.6e-07 1.041e-15 p
9.452e-01 -1.1e-15 -3.8e+02 # 4.267e-15 f
9.700e-01 -6.5e-16 -1.6e+03 # 9.876e-15 f
9.826e-01 0.0e+00 1.6e-07 8.775e-39 p
9.763e-01 -5.0e-16 -6.2e+03 # 3.519e-14 f
9.795e-01 0.0e+00 1.6e-07 6.971e-20 p
9.779e-01 -1.9e-31 -2.2e+04 # 5.600e-18 f
9.787e-01 0.0e+00 1.6e-07 5.546e-19 p
Limiting gains...
9.789e-01 0.0e+00 1.6e-07 1.084e-13 p
9.789e-01 0.0e+00 9.7e-07 1.137e-13 p
Best performance (actual): 0.9789
3.4. Synthesized filters
The obtained filter \(L(s)\) can then be included in the feedback architecture shown in Figure 13.
The closed-loop transfer functions from \(\hat{x}_1\) to \(\hat{x}\) and from \(\hat{x}_2\) to \(\hat{x}\) corresponding respectively to the sensitivity and complementary sensitivity transfer functions are defined below:
%% Complementary filters H1 = inv(1 + L); H2 = 1 - H1;
zpk(H1) =
(s+3.842)^3 (s+153.6) (s+1.289e05)
-------------------------------------------------------
(s+1.29e05) (s^2 + 102.1s + 2733) (s^2 + 69.45s + 3272)
zpk(H2) =
125.61 (s+3358)^2 (s^2 + 46.61s + 813.8)
-------------------------------------------------------
(s+1.29e05) (s^2 + 102.1s + 2733) (s^2 + 69.45s + 3272)
The bode plots of the synthesized complementary filters are compared with the upper bounds in Figure 13.

Figure 13: Bode plot of the obtained complementary filters
4. Synthesis of three complementary filters
In this section, the proposed synthesis method of complementary filters is generalized for the synthesis of a set of three complementary filters.
The complete Matlab script for this part is given in Section 5.4.
4.1. Synthesis Architecture
The synthesis objective is to shape three filters that are complementary. This corresponds to the conditions \eqref{eq:obj_three_cf} where \(W_1(s)\), \(W_2(s)\) and \(W_3(s)\) are weighting functions used to specify the maximum wanted magnitude of the three complementary filters.
\begin{equation} \begin{aligned} & |H_1(j\omega)| < \frac{1}{|W_1(j\omega)|}, \quad \forall\omega \\ & |H_2(j\omega)| < \frac{1}{|W_2(j\omega)|}, \quad \forall\omega \\ & |H_3(j\omega)| < \frac{1}{|W_3(j\omega)|}, \quad \forall\omega \\ & H_1(s) + H_2(s) + H_3(s) = 1 \end{aligned} \label{eq:obj_three_cf} \end{equation}This synthesis can be done by performing the standard \(\mathcal{H}_\infty\) synthesis with on the generalized plant in Figure 14.

Figure 14: Generalized architecture for generating 3 complementary filters
After synthesis, filter \(H_2(s)\) and \(H_3(s)\) are obtained as shown in Figure 14. The last filter \(H_1(s)\) is defined as the complementary of the two others as in \eqref{eq:H1_complementary_of_H2_H3}.
\begin{equation} H_1(s) = 1 - H_2(s) - H_3(s) \label{eq:H1_complementary_of_H2_H3} \end{equation}4.2. Weights
The three weighting functions are defined as shown below.
%% Design of the Weighting Functions W1 = generateWF('n', 2, 'w0', 2*pi*1, 'G0', 1/10, 'Ginf', 1000, 'Gc', 0.5); W2 = 0.22*(1 + s/2/pi/1)^2/(sqrt(1e-4) + s/2/pi/1)^2*(1 + s/2/pi/10)^2/(1 + s/2/pi/1000)^2; W3 = generateWF('n', 3, 'w0', 2*pi*10, 'G0', 1000, 'Ginf', 1/10, 'Gc', 0.5);
Their inverse magnitudes are displayed in Figure 15.
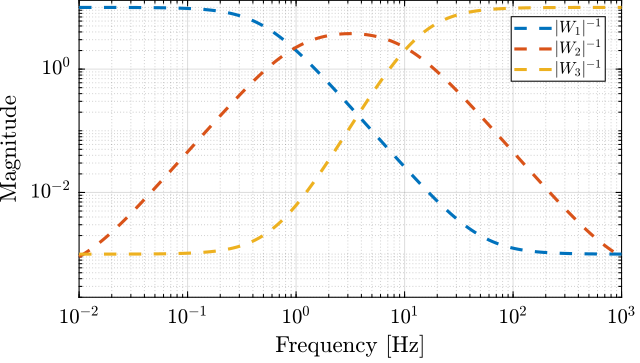
Figure 15: Three weighting functions used for the \(\mathcal{H}_\infty\) synthesis of the complementary filters
4.3. H-Infinity Synthesis
The generalized plant in Figure 14 containing the weighting functions is defined below.
%% Generalized plant for the synthesis of 3 complementary filters P = [W1 -W1 -W1; 0 W2 0 ; 0 0 W3; 1 0 0];
And the standard \(\mathcal{H}_\infty\) synthesis using the hinfsyn command is performed.
%% Standard H-Infinity Synthesis [H, ~, gamma, ~] = hinfsyn(P, 1, 2,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
Resetting value of Gamma min based on D_11, D_12, D_21 terms
Test bounds: 0.1000 < gamma <= 1050.0000
gamma hamx_eig xinf_eig hamy_eig yinf_eig nrho_xy p/f
1.050e+03 3.2e+00 4.5e-13 6.3e-02 -1.2e-11 0.0000 p
525.050 3.2e+00 1.3e-13 6.3e-02 0.0e+00 0.0000 p
262.575 3.2e+00 2.1e-12 6.3e-02 -1.5e-13 0.0000 p
131.337 3.2e+00 1.1e-12 6.3e-02 -7.2e-29 0.0000 p
65.719 3.2e+00 2.0e-12 6.3e-02 0.0e+00 0.0000 p
32.909 3.2e+00 7.4e-13 6.3e-02 -5.9e-13 0.0000 p
16.505 3.2e+00 1.4e-12 6.3e-02 0.0e+00 0.0000 p
8.302 3.2e+00 1.6e-12 6.3e-02 0.0e+00 0.0000 p
4.201 3.2e+00 1.6e-12 6.3e-02 0.0e+00 0.0000 p
2.151 3.2e+00 1.6e-12 6.3e-02 0.0e+00 0.0000 p
1.125 3.2e+00 2.8e-12 6.3e-02 0.0e+00 0.0000 p
0.613 3.0e+00 -2.5e+03# 6.3e-02 0.0e+00 0.0000 f
0.869 3.1e+00 -2.9e+01# 6.3e-02 0.0e+00 0.0000 f
0.997 3.2e+00 1.9e-12 6.3e-02 0.0e+00 0.0000 p
0.933 3.1e+00 -6.9e+02# 6.3e-02 0.0e+00 0.0000 f
0.965 3.1e+00 -3.0e+03# 6.3e-02 0.0e+00 0.0000 f
0.981 3.1e+00 -8.6e+03# 6.3e-02 0.0e+00 0.0000 f
0.989 3.2e+00 -2.7e+04# 6.3e-02 0.0e+00 0.0000 f
0.993 3.2e+00 -5.7e+05# 6.3e-02 0.0e+00 0.0000 f
0.995 3.2e+00 2.2e-12 6.3e-02 0.0e+00 0.0000 p
0.994 3.2e+00 1.6e-12 6.3e-02 0.0e+00 0.0000 p
0.994 3.2e+00 1.0e-12 6.3e-02 0.0e+00 0.0000 p
Gamma value achieved: 0.9936
The two synthesized filters \(H_2(s)\) and \(H_3(s)\) are defined below: And the third filter \(H_1(s)\) is defined using \eqref{eq:H1_complementary_of_H2_H3}.
%% H1 is defined as the complementary filter of H2 and H3 H1 = 1 - H2 - H3;
The bode plots of the three obtained complementary filters are shown in Figure 16.
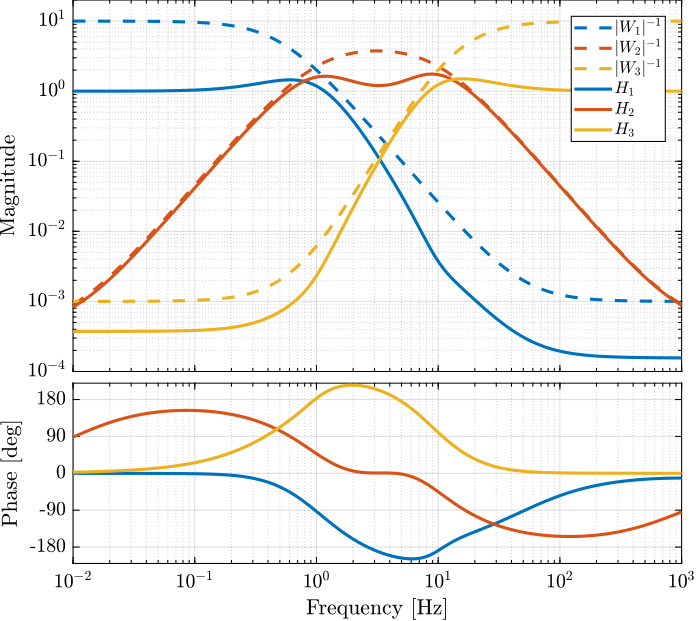
Figure 16: The three complementary filters obtained after \(\mathcal{H}_\infty\) synthesis
5. Matlab Scripts
5.1. 1_synthesis_complementary_filters.m
This scripts corresponds to section 3 of (Dehaeze, Vermat, and Collette 2021).
1: %% Clear Workspace and Close figures 2: clear; close all; clc; 3: 4: %% Intialize Laplace variable 5: s = zpk('s'); 6: 7: %% Initialize Frequency Vector 8: freqs = logspace(-1, 3, 1000); 9: 10: %% Weighting Function Design 11: % Parameters 12: n = 3; w0 = 2*pi*10; G0 = 1e-3; G1 = 1e1; Gc = 2; 13: 14: % Formulas 15: W = (((1/w0)*sqrt((1-(G0/Gc)^(2/n))/(1-(Gc/G1)^(2/n)))*s + (G0/Gc)^(1/n))/((1/G1)^(1/n)*(1/w0)*sqrt((1-(G0/Gc)^(2/n))/(1-(Gc/G1)^(2/n)))*s + (1/Gc)^(1/n)))^n; 16: 17: %% Magnitude of the weighting function with parameters 18: figure; 19: hold on; 20: plot(freqs, abs(squeeze(freqresp(W, freqs, 'Hz'))), 'k-'); 21: 22: plot([1e-3 1e0], [G0 G0], 'k--', 'LineWidth', 1) 23: text(1e0, G0, '$\quad G_0$') 24: 25: plot([1e1 1e3], [G1 G1], 'k--', 'LineWidth', 1) 26: text(1e1,G1,'$G_{\infty}\quad$','HorizontalAlignment', 'right') 27: 28: plot([w0/2/pi w0/2/pi], [1 2*Gc], 'k--', 'LineWidth', 1) 29: text(w0/2/pi,1,'$\omega_c$','VerticalAlignment', 'top', 'HorizontalAlignment', 'center') 30: 31: plot([w0/2/pi/2 2*w0/2/pi], [Gc Gc], 'k--', 'LineWidth', 1) 32: text(w0/2/pi/2, Gc, '$G_c \quad$','HorizontalAlignment', 'right') 33: 34: text(w0/5/pi/2, abs(evalfr(W, j*w0/5)), 'Slope: $n \quad$', 'HorizontalAlignment', 'right') 35: 36: text(w0/2/pi, abs(evalfr(W, j*w0)), '$\bullet$', 'HorizontalAlignment', 'center') 37: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 38: xlabel('Frequency [Hz]'); ylabel('Magnitude'); 39: hold off; 40: xlim([freqs(1), freqs(end)]); 41: ylim([5e-4, 20]); 42: yticks([1e-4, 1e-3, 1e-2, 1e-1, 1, 1e1]); 43: 44: %% Design of the Weighting Functions 45: W1 = generateWF('n', 3, 'w0', 2*pi*10, 'G0', 1000, 'Ginf', 1/10, 'Gc', 0.45); 46: W2 = generateWF('n', 2, 'w0', 2*pi*10, 'G0', 1/10, 'Ginf', 1000, 'Gc', 0.45); 47: 48: %% Plot of the Weighting function magnitude 49: figure; 50: tiledlayout(1, 1, 'TileSpacing', 'None', 'Padding', 'None'); 51: ax1 = nexttile(); 52: hold on; 53: set(gca,'ColorOrderIndex',1) 54: plot(freqs, 1./abs(squeeze(freqresp(W1, freqs, 'Hz'))), '--', 'DisplayName', '$|W_1|^{-1}$'); 55: set(gca,'ColorOrderIndex',2) 56: plot(freqs, 1./abs(squeeze(freqresp(W2, freqs, 'Hz'))), '--', 'DisplayName', '$|W_2|^{-1}$'); 57: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 58: xlabel('Frequency [Hz]', 'FontSize', 10); ylabel('Magnitude', 'FontSize', 10); 59: hold off; 60: xlim([freqs(1), freqs(end)]); 61: xticks([0.1, 1, 10, 100, 1000]); 62: ylim([8e-4, 20]); 63: yticks([1e-3, 1e-2, 1e-1, 1, 1e1]); 64: yticklabels({'', '$10^{-2}$', '', '$10^0$', ''}); 65: ax1.FontSize = 9; 66: leg = legend('location', 'south', 'FontSize', 8); 67: leg.ItemTokenSize(1) = 18; 68: 69: %% Generalized Plant 70: P = [W1 -W1; 71: 0 W2; 72: 1 0]; 73: 74: %% H-Infinity Synthesis 75: [H2, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on'); 76: 77: %% Define H1 to be the complementary of H2 78: H1 = 1 - H2; 79: 80: %% Bode plot of the complementary filters 81: figure; 82: tiledlayout(3, 1, 'TileSpacing', 'None', 'Padding', 'None'); 83: 84: % Magnitude 85: ax1 = nexttile([2, 1]); 86: hold on; 87: set(gca,'ColorOrderIndex',1) 88: plot(freqs, 1./abs(squeeze(freqresp(W1, freqs, 'Hz'))), '--', 'DisplayName', '$|W_1|^{-1}$'); 89: set(gca,'ColorOrderIndex',2) 90: plot(freqs, 1./abs(squeeze(freqresp(W2, freqs, 'Hz'))), '--', 'DisplayName', '$|W_2|^{-1}$'); 91: 92: set(gca,'ColorOrderIndex',1) 93: plot(freqs, abs(squeeze(freqresp(H1, freqs, 'Hz'))), '-', 'DisplayName', '$H_1$'); 94: set(gca,'ColorOrderIndex',2) 95: plot(freqs, abs(squeeze(freqresp(H2, freqs, 'Hz'))), '-', 'DisplayName', '$H_2$'); 96: hold off; 97: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 98: set(gca, 'XTickLabel',[]); ylabel('Magnitude'); 99: ylim([8e-4, 20]); 100: yticks([1e-3, 1e-2, 1e-1, 1, 1e1]); 101: yticklabels({'', '$10^{-2}$', '', '$10^0$', ''}) 102: leg = legend('location', 'south', 'FontSize', 8, 'NumColumns', 2); 103: leg.ItemTokenSize(1) = 18; 104: 105: % Phase 106: ax2 = nexttile; 107: hold on; 108: set(gca,'ColorOrderIndex',1) 109: plot(freqs, 180/pi*phase(squeeze(freqresp(H1, freqs, 'Hz'))), '-'); 110: set(gca,'ColorOrderIndex',2) 111: plot(freqs, 180/pi*phase(squeeze(freqresp(H2, freqs, 'Hz'))), '-'); 112: hold off; 113: set(gca, 'XScale', 'log'); 114: xlabel('Frequency [Hz]'); ylabel('Phase [deg]'); 115: yticks([-180:90:180]); 116: ylim([-180, 200]) 117: yticklabels({'-180', '', '0', '', '180'}) 118: 119: linkaxes([ax1,ax2],'x'); 120: xlim([freqs(1), freqs(end)]);
5.2. 2_ligo_complementary_filters.m
This scripts corresponds to section 4 of (Dehaeze, Vermat, and Collette 2021).
1: %% Clear Workspace and Close figures 2: clear; close all; clc; 3: 4: %% Intialize Laplace variable 5: s = zpk('s'); 6: 7: %% Initialize Frequency Vector 8: freqs = logspace(-3, 0, 1000); 9: 10: %% Upper bounds for the complementary filters 11: figure; 12: hold on; 13: set(gca,'ColorOrderIndex',1) 14: plot([0.0001, 0.008], [8e-3, 8e-3], ':', 'DisplayName', 'Spec. on $H_H$'); 15: set(gca,'ColorOrderIndex',1) 16: plot([0.008 0.04], [8e-3, 1], ':', 'HandleVisibility', 'off'); 17: set(gca,'ColorOrderIndex',1) 18: plot([0.04 0.1], [3, 3], ':', 'HandleVisibility', 'off'); 19: set(gca,'ColorOrderIndex',2) 20: plot([0.1, 10], [0.045, 0.045], ':', 'DisplayName', 'Spec. on $H_L$'); 21: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 22: xlabel('Frequency [Hz]'); ylabel('Magnitude'); 23: hold off; 24: xlim([freqs(1), freqs(end)]); 25: ylim([1e-4, 10]); 26: leg = legend('location', 'southeast', 'FontSize', 8); 27: leg.ItemTokenSize(1) = 18; 28: 29: %% Initialized CVX 30: cvx_startup; 31: cvx_solver sedumi; 32: 33: %% Frequency vectors 34: w1 = 0:4.06e-4:0.008; 35: w2 = 0.008:4.06e-4:0.04; 36: w3 = 0.04:8.12e-4:0.1; 37: w4 = 0.1:8.12e-4:0.83; 38: 39: %% Filter order 40: n = 512; 41: 42: %% Initialization of filter responses 43: A1 = [ones(length(w1),1), cos(kron(w1'.*(2*pi),[1:n-1]))]; 44: A2 = [ones(length(w2),1), cos(kron(w2'.*(2*pi),[1:n-1]))]; 45: A3 = [ones(length(w3),1), cos(kron(w3'.*(2*pi),[1:n-1]))]; 46: A4 = [ones(length(w4),1), cos(kron(w4'.*(2*pi),[1:n-1]))]; 47: 48: B1 = [zeros(length(w1),1), sin(kron(w1'.*(2*pi),[1:n-1]))]; 49: B2 = [zeros(length(w2),1), sin(kron(w2'.*(2*pi),[1:n-1]))]; 50: B3 = [zeros(length(w3),1), sin(kron(w3'.*(2*pi),[1:n-1]))]; 51: B4 = [zeros(length(w4),1), sin(kron(w4'.*(2*pi),[1:n-1]))]; 52: 53: %% Convex optimization 54: cvx_begin 55: 56: variable y(n+1,1) 57: 58: % t 59: maximize(-y(1)) 60: 61: for i = 1:length(w1) 62: norm([0 A1(i,:); 0 B1(i,:)]*y) <= 8e-3; 63: end 64: 65: for i = 1:length(w2) 66: norm([0 A2(i,:); 0 B2(i,:)]*y) <= 8e-3*(2*pi*w2(i)/(0.008*2*pi))^3; 67: end 68: 69: for i = 1:length(w3) 70: norm([0 A3(i,:); 0 B3(i,:)]*y) <= 3; 71: end 72: 73: for i = 1:length(w4) 74: norm([[1 0]'- [0 A4(i,:); 0 B4(i,:)]*y]) <= y(1); 75: end 76: 77: cvx_end 78: 79: h = y(2:end); 80: 81: %% Combine the frequency vectors to form the obtained filter 82: w = [w1 w2 w3 w4]; 83: H = [exp(-j*kron(w'.*2*pi,[0:n-1]))]*h; 84: 85: %% Bode plot of the obtained complementary filters 86: figure; 87: tiledlayout(3, 1, 'TileSpacing', 'None', 'Padding', 'None'); 88: 89: % Magnitude 90: ax1 = nexttile([2, 1]); 91: hold on; 92: set(gca,'ColorOrderIndex',1) 93: plot(w, abs(1-H), '-', 'DisplayName', '$L_1$'); 94: plot([0.1, 10], [0.045, 0.045], 'k:', 'DisplayName', 'Spec. on $L_1$'); 95: 96: set(gca,'ColorOrderIndex',2) 97: plot(w, abs(H), '-', 'DisplayName', '$H_1$'); 98: plot([0.0001, 0.008], [8e-3, 8e-3], 'k--', 'DisplayName', 'Spec. on $H_1$'); 99: plot([0.008 0.04], [8e-3, 1], 'k--', 'HandleVisibility', 'off'); 100: plot([0.04 0.1], [3, 3], 'k--', 'HandleVisibility', 'off'); 101: 102: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 103: set(gca, 'XTickLabel',[]); ylabel('Magnitude'); 104: hold off; 105: ylim([5e-3, 10]); 106: leg = legend('location', 'southeast', 'FontSize', 8, 'NumColumns', 2); 107: leg.ItemTokenSize(1) = 16; 108: 109: % Phase 110: ax2 = nexttile; 111: hold on; 112: plot(w, 180/pi*unwrap(angle(1-H)), '-'); 113: plot(w, 180/pi*unwrap(angle(H)), '-'); 114: hold off; 115: xlabel('Frequency [Hz]'); ylabel('Phase [deg]'); 116: set(gca, 'XScale', 'log'); 117: yticks([-360:180:180]); ylim([-380, 200]); 118: 119: linkaxes([ax1,ax2],'x'); 120: xlim([1e-3, 1]); 121: 122: %% Design of the weight for the high pass filter 123: w1 = 2*pi*0.008; x1 = 0.35; 124: w2 = 2*pi*0.04; x2 = 0.5; 125: w3 = 2*pi*0.05; x3 = 0.5; 126: 127: % Slope of +3 from w1 128: wH = 0.008*(s^2/w1^2 + 2*x1/w1*s + 1)*(s/w1 + 1); 129: % Little bump from w2 to w3 130: wH = wH*(s^2/w2^2 + 2*x2/w2*s + 1)/(s^2/w3^2 + 2*x3/w3*s + 1); 131: % No Slope at high frequencies 132: wH = wH/(s^2/w3^2 + 2*x3/w3*s + 1)/(s/w3 + 1); 133: % Little bump between w2 and w3 134: w0 = 2*pi*0.045; xi = 0.1; A = 2; n = 1; 135: wH = wH*((s^2 + 2*w0*xi*A^(1/n)*s + w0^2)/(s^2 + 2*w0*xi*s + w0^2))^n; 136: 137: wH = 1/wH; 138: wH = minreal(ss(wH)); 139: 140: %% Design of the weight for the low pass filter 141: n = 20; % Filter order 142: Rp = 1; % Peak to peak passband ripple 143: Wp = 2*pi*0.102; % Edge frequency 144: 145: % Chebyshev Type I filter design 146: [b,a] = cheby1(n, Rp, Wp, 'high', 's'); 147: wL = 0.04*tf(a, b); 148: 149: wL = 1/wL; 150: wL = minreal(ss(wL)); 151: 152: %% Magnitude of the designed Weights and initial specifications 153: figure; 154: hold on; 155: set(gca,'ColorOrderIndex',1); 156: plot(freqs, abs(squeeze(freqresp(inv(wL), freqs, 'Hz'))), '-', 'DisplayName', '$|W_L|^{-1}$'); 157: plot([0.1, 10], [0.045, 0.045], 'k:', 'DisplayName', 'Spec. on $L_1$'); 158: 159: set(gca,'ColorOrderIndex',2); 160: plot(freqs, abs(squeeze(freqresp(inv(wH), freqs, 'Hz'))), '-', 'DisplayName', '$|W_H|^{-1}$'); 161: plot([0.0001, 0.008], [8e-3, 8e-3], 'k--', 'DisplayName', 'Spec. on $H_1$'); 162: plot([0.008 0.04], [8e-3, 1], 'k--', 'HandleVisibility', 'off'); 163: plot([0.04 0.1], [3, 3], 'k--', 'HandleVisibility', 'off'); 164: 165: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 166: xlabel('Frequency [Hz]'); ylabel('Magnitude'); 167: hold off; 168: xlim([freqs(1), freqs(end)]); 169: ylim([5e-3, 10]); 170: leg = legend('location', 'southeast', 'FontSize', 8, 'NumColumns', 2); 171: leg.ItemTokenSize(1) = 16; 172: 173: %% Generalized plant for the H-infinity Synthesis 174: P = [0 wL; 175: wH -wH; 176: 1 0]; 177: 178: %% Standard H-Infinity synthesis 179: [Hl, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on'); 180: 181: %% High pass filter as the complementary of the low pass filter 182: Hh = 1 - Hl; 183: 184: %% Minimum realization of the filters 185: Hh = minreal(Hh); 186: Hl = minreal(Hl); 187: 188: %% Bode plot of the obtained filters and comparison with the upper bounds 189: figure; 190: hold on; 191: set(gca,'ColorOrderIndex',1); 192: plot(freqs, abs(squeeze(freqresp(Hl, freqs, 'Hz'))), '-', 'DisplayName', '$L_1^\prime$'); 193: plot([0.1, 10], [0.045, 0.045], 'k:', 'DisplayName', 'Spec. on $L_1$'); 194: 195: set(gca,'ColorOrderIndex',2); 196: plot(freqs, abs(squeeze(freqresp(Hh, freqs, 'Hz'))), '-', 'DisplayName', '$H_1^\prime$'); 197: plot([0.0001, 0.008], [8e-3, 8e-3], 'k--', 'DisplayName', 'Spec. on $H_1$'); 198: plot([0.008 0.04], [8e-3, 1], 'k--', 'HandleVisibility', 'off'); 199: plot([0.04 0.1], [3, 3], 'k--', 'HandleVisibility', 'off'); 200: 201: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 202: xlabel('Frequency [Hz]'); ylabel('Magnitude'); 203: hold off; 204: xlim([freqs(1), freqs(end)]); 205: ylim([5e-3, 10]); 206: leg = legend('location', 'southeast', 'FontSize', 8, 'NumColumns', 2); 207: leg.ItemTokenSize(1) = 16; 208: 209: %% Comparison of the complementary filters obtained with H-infinity and with CVX 210: figure; 211: tiledlayout(3, 1, 'TileSpacing', 'None', 'Padding', 'None'); 212: 213: % Magnitude 214: ax1 = nexttile([2, 1]); 215: hold on; 216: set(gca,'ColorOrderIndex',1); 217: plot(freqs, abs(squeeze(freqresp(Hl, freqs, 'Hz'))), '-', ... 218: 'DisplayName', '$L_1(s)$ - $\mathcal{H}_\infty$'); 219: set(gca,'ColorOrderIndex',2); 220: plot(freqs, abs(squeeze(freqresp(Hh, freqs, 'Hz'))), '-', ... 221: 'DisplayName', '$H_1(s)$ - $\mathcal{H}_\infty$'); 222: 223: set(gca,'ColorOrderIndex',1); 224: plot(w, abs(1-H), '--', ... 225: 'DisplayName', '$L_1(s)$ - FIR'); 226: set(gca,'ColorOrderIndex',2); 227: plot(w, abs(H), '--', ... 228: 'DisplayName', '$H_1(s)$ - FIR'); 229: hold off; 230: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 231: ylabel('Magnitude'); 232: set(gca, 'XTickLabel',[]); 233: ylim([5e-3, 10]); 234: leg = legend('location', 'southeast', 'FontSize', 8, 'NumColumns', 2); 235: leg.ItemTokenSize(1) = 16; 236: 237: % Phase 238: ax2 = nexttile; 239: hold on; 240: set(gca,'ColorOrderIndex',1); 241: plot(freqs, 180/pi*unwrap(angle(squeeze(freqresp(Hl, freqs, 'Hz')))), '-'); 242: set(gca,'ColorOrderIndex',2); 243: plot(freqs, 180/pi*unwrap(angle(squeeze(freqresp(Hh, freqs, 'Hz')))), '-'); 244: 245: set(gca,'ColorOrderIndex',1); 246: plot(w, 180/pi*unwrap(angle(1-H)), '--'); 247: set(gca,'ColorOrderIndex',2); 248: plot(w, 180/pi*unwrap(angle(H)), '--'); 249: set(gca, 'XScale', 'log'); 250: xlabel('Frequency [Hz]'); ylabel('Phase [deg]'); 251: hold off; 252: yticks([-360:180:180]); ylim([-380, 200]); 253: 254: linkaxes([ax1,ax2],'x'); 255: xlim([freqs(1), freqs(end)]);
5.3. 3_closed_loop_complementary_filters.m
This scripts corresponds to section 5.1 of (Dehaeze, Vermat, and Collette 2021).
1: %% Clear Workspace and Close figures 2: clear; close all; clc; 3: 4: %% Intialize Laplace variable 5: s = zpk('s'); 6: 7: %% Initialize Frequency Vector 8: freqs = logspace(-1, 3, 1000); 9: 10: %% Design of the Weighting Functions 11: W1 = generateWF('n', 3, 'w0', 2*pi*10, 'G0', 1000, 'Ginf', 1/10, 'Gc', 0.45); 12: W2 = generateWF('n', 2, 'w0', 2*pi*10, 'G0', 1/10, 'Ginf', 1000, 'Gc', 0.45); 13: 14: %% Generalized plant for "closed-loop" complementary filter synthesis 15: P = [ W1 0 1; 16: -W1 W2 -1]; 17: 18: %% Standard H-Infinity Synthesis 19: [L, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on'); 20: 21: %% Complementary filters 22: H1 = inv(1 + L); 23: H2 = 1 - H1; 24: 25: %% Bode plot of the obtained Complementary filters with upper-bounds 26: freqs = logspace(-1, 3, 1000); 27: figure; 28: tiledlayout(3, 1, 'TileSpacing', 'None', 'Padding', 'None'); 29: 30: % Magnitude 31: ax1 = nexttile([2, 1]); 32: hold on; 33: set(gca,'ColorOrderIndex',1) 34: plot(freqs, 1./abs(squeeze(freqresp(W1, freqs, 'Hz'))), '--', 'DisplayName', '$|W_1|^{-1}$'); 35: set(gca,'ColorOrderIndex',2) 36: plot(freqs, 1./abs(squeeze(freqresp(W2, freqs, 'Hz'))), '--', 'DisplayName', '$|W_2|^{-1}$'); 37: 38: set(gca,'ColorOrderIndex',1) 39: plot(freqs, abs(squeeze(freqresp(H1, freqs, 'Hz'))), '-', 'DisplayName', '$H_1$'); 40: set(gca,'ColorOrderIndex',2) 41: plot(freqs, abs(squeeze(freqresp(H2, freqs, 'Hz'))), '-', 'DisplayName', '$H_2$'); 42: 43: plot(freqs, abs(squeeze(freqresp(L, freqs, 'Hz'))), 'k--', 'DisplayName', '$|L|$'); 44: hold off; 45: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 46: set(gca, 'XTickLabel',[]); ylabel('Magnitude'); 47: ylim([1e-3, 1e3]); 48: yticks([1e-3, 1e-2, 1e-1, 1, 1e1, 1e2, 1e3]); 49: yticklabels({'', '$10^{-2}$', '', '$10^0$', '', '$10^2$', ''}); 50: leg = legend('location', 'northeast', 'FontSize', 8, 'NumColumns', 3); 51: leg.ItemTokenSize(1) = 18; 52: 53: % Phase 54: ax2 = nexttile; 55: hold on; 56: set(gca,'ColorOrderIndex',1) 57: plot(freqs, 180/pi*phase(squeeze(freqresp(H1, freqs, 'Hz'))), '-'); 58: set(gca,'ColorOrderIndex',2) 59: plot(freqs, 180/pi*phase(squeeze(freqresp(H2, freqs, 'Hz'))), '-'); 60: hold off; 61: set(gca, 'XScale', 'log'); 62: xlabel('Frequency [Hz]'); ylabel('Phase [deg]'); 63: yticks([-180:90:180]); 64: ylim([-180, 200]) 65: yticklabels({'-180', '', '0', '', '180'}) 66: 67: linkaxes([ax1,ax2],'x'); 68: xlim([freqs(1), freqs(end)]);
5.4. 4_three_complementary_filters.m
This scripts corresponds to section 5.2 of (Dehaeze, Vermat, and Collette 2021).
1: %% Clear Workspace and Close figures 2: clear; close all; clc; 3: 4: %% Intialize Laplace variable 5: s = zpk('s'); 6: 7: freqs = logspace(-2, 3, 1000); 8: 9: %% Design of the Weighting Functions 10: W1 = generateWF('n', 2, 'w0', 2*pi*1, 'G0', 1/10, 'Ginf', 1000, 'Gc', 0.5); 11: W2 = 0.22*(1 + s/2/pi/1)^2/(sqrt(1e-4) + s/2/pi/1)^2*(1 + s/2/pi/10)^2/(1 + s/2/pi/1000)^2; 12: W3 = generateWF('n', 3, 'w0', 2*pi*10, 'G0', 1000, 'Ginf', 1/10, 'Gc', 0.5); 13: 14: %% Inverse magnitude of the weighting functions 15: figure; 16: hold on; 17: set(gca,'ColorOrderIndex',1) 18: plot(freqs, 1./abs(squeeze(freqresp(W1, freqs, 'Hz'))), '--', 'DisplayName', '$|W_1|^{-1}$'); 19: set(gca,'ColorOrderIndex',2) 20: plot(freqs, 1./abs(squeeze(freqresp(W2, freqs, 'Hz'))), '--', 'DisplayName', '$|W_2|^{-1}$'); 21: set(gca,'ColorOrderIndex',3) 22: plot(freqs, 1./abs(squeeze(freqresp(W3, freqs, 'Hz'))), '--', 'DisplayName', '$|W_3|^{-1}$'); 23: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 24: xlabel('Frequency [Hz]'); ylabel('Magnitude'); 25: hold off; 26: xlim([freqs(1), freqs(end)]); ylim([2e-4, 1.3e1]) 27: leg = legend('location', 'northeast', 'FontSize', 8); 28: leg.ItemTokenSize(1) = 18; 29: 30: %% Generalized plant for the synthesis of 3 complementary filters 31: P = [W1 -W1 -W1; 32: 0 W2 0 ; 33: 0 0 W3; 34: 1 0 0]; 35: 36: %% Standard H-Infinity Synthesis 37: [H, ~, gamma, ~] = hinfsyn(P, 1, 2,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on'); 38: 39: %% Synthesized H2 and H3 filters 40: H2 = tf(H(1)); 41: H3 = tf(H(2)); 42: 43: %% H1 is defined as the complementary filter of H2 and H3 44: H1 = 1 - H2 - H3; 45: 46: %% Bode plot of the obtained complementary filters 47: figure; 48: tiledlayout(3, 1, 'TileSpacing', 'None', 'Padding', 'None'); 49: 50: % Magnitude 51: ax1 = nexttile([2, 1]); 52: hold on; 53: set(gca,'ColorOrderIndex',1) 54: plot(freqs, 1./abs(squeeze(freqresp(W1, freqs, 'Hz'))), '--', 'DisplayName', '$|W_1|^{-1}$'); 55: set(gca,'ColorOrderIndex',2) 56: plot(freqs, 1./abs(squeeze(freqresp(W2, freqs, 'Hz'))), '--', 'DisplayName', '$|W_2|^{-1}$'); 57: set(gca,'ColorOrderIndex',3) 58: plot(freqs, 1./abs(squeeze(freqresp(W3, freqs, 'Hz'))), '--', 'DisplayName', '$|W_3|^{-1}$'); 59: set(gca,'ColorOrderIndex',1) 60: plot(freqs, abs(squeeze(freqresp(H1, freqs, 'Hz'))), '-', 'DisplayName', '$H_1$'); 61: set(gca,'ColorOrderIndex',2) 62: plot(freqs, abs(squeeze(freqresp(H2, freqs, 'Hz'))), '-', 'DisplayName', '$H_2$'); 63: set(gca,'ColorOrderIndex',3) 64: plot(freqs, abs(squeeze(freqresp(H3, freqs, 'Hz'))), '-', 'DisplayName', '$H_3$'); 65: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 66: hold off; 67: set(gca, 'XScale', 'log'); set(gca, 'YScale', 'log'); 68: ylabel('Magnitude'); 69: set(gca, 'XTickLabel',[]); 70: ylim([1e-4, 20]); 71: leg = legend('location', 'northeast', 'FontSize', 8); 72: leg.ItemTokenSize(1) = 18; 73: 74: % Phase 75: ax2 = nexttile; 76: hold on; 77: set(gca,'ColorOrderIndex',1) 78: plot(freqs, 180/pi*phase(squeeze(freqresp(H1, freqs, 'Hz')))); 79: set(gca,'ColorOrderIndex',2) 80: plot(freqs, 180/pi*phase(squeeze(freqresp(H2, freqs, 'Hz')))); 81: set(gca,'ColorOrderIndex',3) 82: plot(freqs, 180/pi*phase(squeeze(freqresp(H3, freqs, 'Hz')))); 83: hold off; 84: xlabel('Frequency [Hz]'); ylabel('Phase [deg]'); 85: set(gca, 'XScale', 'log'); 86: yticks([-180:90:180]); ylim([-220, 220]); 87: 88: linkaxes([ax1,ax2],'x'); 89: xlim([freqs(1), freqs(end)]);
5.5. generateWF: Generate Weighting Functions
This function is used to easily generate weighting functions from classical requirements.
function [W] = generateWF(args) % createWeight - % % Syntax: [W] = generateWeight(args) % % Inputs: % - n - Weight Order (integer) % - G0 - Low frequency Gain % - G1 - High frequency Gain % - Gc - Gain of the weight at frequency w0 % - w0 - Frequency at which |W(j w0)| = Gc [rad/s] % % Outputs: % - W - Generated Weighting Function %% Argument validation arguments args.n (1,1) double {mustBeInteger, mustBePositive} = 1 args.G0 (1,1) double {mustBeNumeric, mustBePositive} = 0.1 args.Ginf (1,1) double {mustBeNumeric, mustBePositive} = 10 args.Gc (1,1) double {mustBeNumeric, mustBePositive} = 1 args.w0 (1,1) double {mustBeNumeric, mustBePositive} = 1 end % Verification of correct relation between G0, Gc and Ginf mustBeBetween(args.G0, args.Gc, args.Ginf); %% Initialize the Laplace variable s = zpk('s'); %% Create the weighting function according to formula W = (((1/args.w0)*sqrt((1-(args.G0/args.Gc)^(2/args.n))/(1-(args.Gc/args.Ginf)^(2/args.n)))*s + ... (args.G0/args.Gc)^(1/args.n))/... ((1/args.Ginf)^(1/args.n)*(1/args.w0)*sqrt((1-(args.G0/args.Gc)^(2/args.n))/(1-(args.Gc/args.Ginf)^(2/args.n)))*s + ... (1/args.Gc)^(1/args.n)))^args.n; %% Custom validation function function mustBeBetween(a,b,c) if ~((a > b && b > c) || (c > b && b > a)) eid = 'createWeight:inputError'; msg = 'Gc should be between G0 and Ginf.'; throwAsCaller(MException(eid,msg)) end
5.6. generateCF: Generate Complementary Filters
This function is used to easily synthesize a set of two complementary filters using the \(\mathcal{H}_\infty\) synthesis.
function [H1, H2] = generateCF(W1, W2, args) % createWeight - % % Syntax: [H1, H2] = generateCF(W1, W2, args) % % Inputs: % - W1 - Weighting Function for H1 % - W2 - Weighting Function for H2 % - args: % - method - H-Infinity solver ('lmi' or 'ric') % - display - Display synthesis results ('on' or 'off') % % Outputs: % - H1 - Generated H1 Filter % - H2 - Generated H2 Filter %% Argument validation arguments W1 W2 args.method char {mustBeMember(args.method,{'lmi', 'ric'})} = 'ric' args.display char {mustBeMember(args.display,{'on', 'off'})} = 'on' end %% The generalized plant is defined P = [W1 -W1; 0 W2; 1 0]; %% The standard H-infinity synthesis is performed [H2, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', args.method, 'DISPLAY', args.display); %% H1 is defined as the complementary of H2 H1 = 1 - H2;