Robust and Optimal Sensor Fusion - Matlab Computation
Table of Contents
- 1. Sensor Description
- 2. Optimal Super Sensor Noise: \(\mathcal{H}_2\) Synthesis with Acc and Pos
- 3. Robust Sensor Fusion: \(\mathcal{H}_\infty\) Synthesis with Acc and Pos
- 4. Optimal and Robust Sensor Fusion: Mixed \(\mathcal{H}_2/\mathcal{H}_\infty\) Synthesis with Acc and Pos
- 4.1. Mixed \(\mathcal{H}_2\) / \(\mathcal{H}_\infty\) Synthesis - Introduction
- 4.2. Noise characteristics and Uncertainty of the individual sensors
- 4.3. Weighting Functions on the uncertainty of the super sensor
- 4.4. Mixed \(\mathcal{H}_2\) / \(\mathcal{H}_\infty\) Synthesis
- 4.5. Obtained Super Sensor’s noise
- 4.6. Obtained Super Sensor’s Uncertainty
- 4.7. Comparison Hinf H2 H2/Hinf
- 4.8. Conclusion
- 5. Functions
In this document, the optimal and robust design of complementary filters is studied.
Two sensors are considered with both different noise characteristics and dynamical uncertainties represented by multiplicative input uncertainty.
- Section 2: the \(\mathcal{H}_2\) synthesis is used to design complementary filters such that the RMS value of the super sensor’s noise is minimized
- Section 3: the \(\mathcal{H}_\infty\) synthesis is used to design complementary filters such that the super sensor’s uncertainty is bonded to acceptable values
- Section 4: the mixed \(\mathcal{H}_2/\mathcal{H}_\infty\) synthesis is used to both limit the super sensor’s uncertainty and to lower the RMS value of the super sensor’s noise
1 Sensor Description
In Figure 1 is shown a schematic of a sensor model that is used in the following study.
| Notation | Meaning |
|---|---|
| \(x\) | Physical measured quantity |
| \(\tilde{n}_i\) | White noise with unitary PSD |
| \(n_i\) | Shaped noise |
| \(v_i\) | Sensor output measurement |
| \(\hat{x}_i\) | Estimate of \(x\) from the sensor |
| Notation | Meaning |
|---|---|
| \(\hat{G}_i\) | Nominal Sensor Dynamics |
| \(W_i\) | Weight representing the size of the uncertainty at each frequency |
| \(\Delta_i\) | Any complex perturbation such that \(\vert\vert\Delta_i\vert\vert_\infty < 1\) |
| \(N_i\) | Weight representing the sensor noise |

Figure 1: Sensor Model
In this example, the measured quantity \(x\) is the velocity of an object. The units of signals are listed in Table 3. The units of systems are listed in Table 4.
| Notation | Unit |
|---|---|
| \(x\) | \([m/s]\) |
| \(\tilde{n}_i\) | |
| \(n_i\) | \([m/s]\) |
| \(v_i\) | \([V]\) |
| \(\hat{x}_i\) | \([m/s]\) |
| Notation | Unit |
|---|---|
| \(\hat{G}_i\) | \([\frac{V}{m/s}]\) |
| \(\hat{G}_i^{-1}\) | \([\frac{m/s}{V}]\) |
| \(W_i\) | |
| \(\Delta_i\) | |
| \(N_i\) | \([m/s]\) |
1.1 Sensor Dynamics
Let’s consider two sensors measuring the velocity of an object.
The first sensor is an accelerometer. Its nominal dynamics \(\hat{G}_1(s)\) is defined below.
m_acc = 0.01; % Inertial Mass [kg] c_acc = 5; % Damping [N/(m/s)] k_acc = 1e5; % Stiffness [N/m] g_acc = 1e5; % Gain [V/m] G1 = -g_acc*m_acc*s/(m_acc*s^2 + c_acc*s + k_acc); % Accelerometer Plant [V/(m/s)]
The second sensor is a displacement sensor, its nominal dynamics \(\hat{G}_2(s)\) is defined below.
w_pos = 2*pi*2e3; % Measurement Banwdith [rad/s] g_pos = 1e4; % Gain [V/m] G2 = g_pos/s/(1 + s/w_pos); % Position Sensor Plant [V/(m/s)]
These nominal dynamics are also taken as the model of the sensor dynamics. The true sensor dynamics has some uncertainty associated to it and described in section 1.2.
Both sensor dynamics in \([\frac{V}{m/s}]\) are shown in Figure 2.
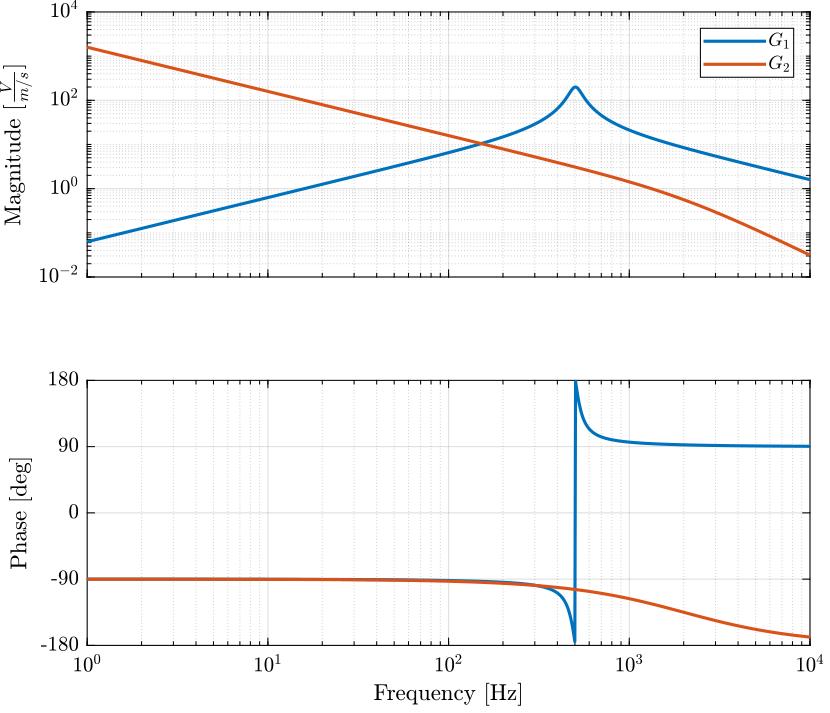
Figure 2: Sensor nominal dynamics from the velocity of the object to the output voltage
1.2 Sensor Model Uncertainty
The uncertainty on the sensor dynamics is described by multiplicative uncertainty (Figure 1).
The true sensor dynamics \(G_i(s)\) is then described by \eqref{eq:sensor_dynamics_uncertainty}.
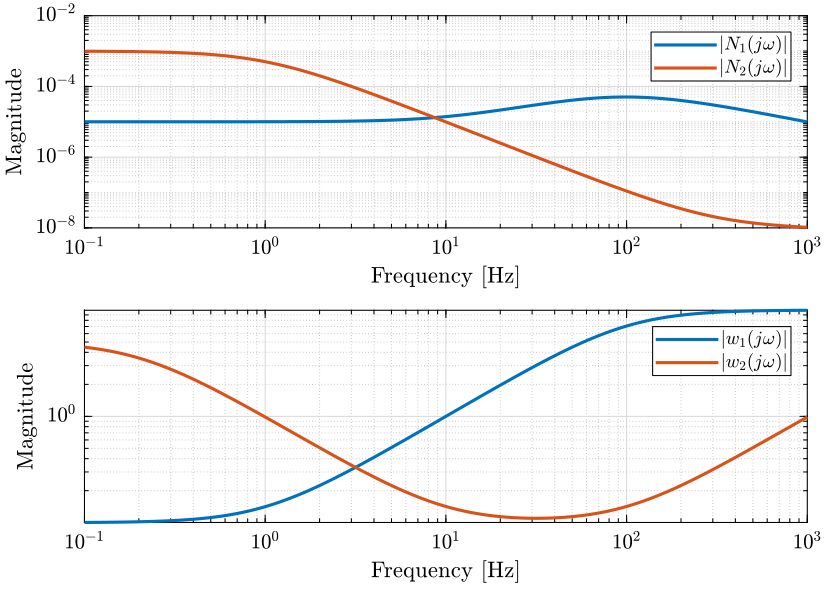
\begin{equation} G_i(s) = \hat{G}_i(s) \left( 1 + W_i(s) \Delta_i(s) \right); \quad |\Delta_i(j\omega)| < 1 \forall \omega \label{eq:sensor_dynamics_uncertainty} \end{equation}The weights \(W_i(s)\) representing the dynamical uncertainty are defined below and their magnitude is shown in Figure 3.
W1 = createWeight('n', 2, 'w0', 2*pi*3, 'G0', 2, 'G1', 0.1, 'Gc', 1) * ...
createWeight('n', 2, 'w0', 2*pi*1e3, 'G0', 1, 'G1', 4/0.1, 'Gc', 1/0.1);
W2 = createWeight('n', 2, 'w0', 2*pi*1e2, 'G0', 0.05, 'G1', 4, 'Gc', 1);
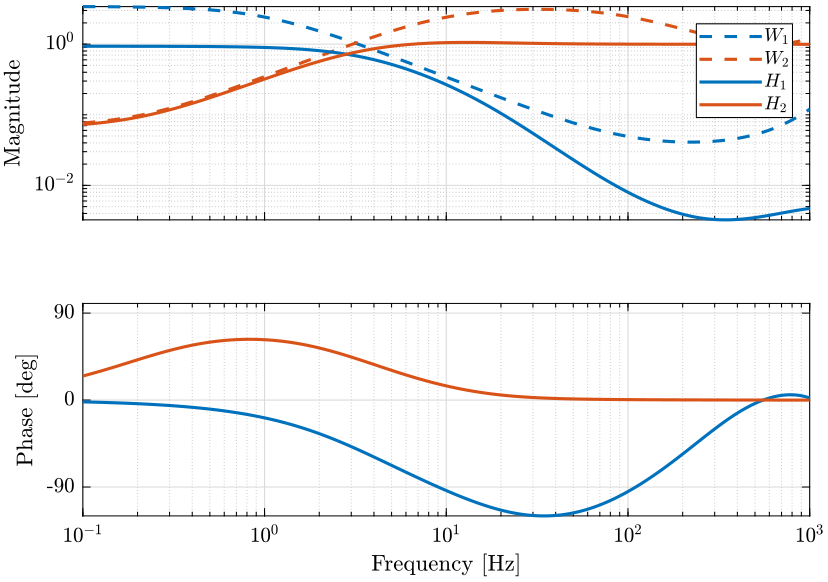
The bode plot of the sensors nominal dynamics as well as their defined dynamical spread are shown in Figure 4.
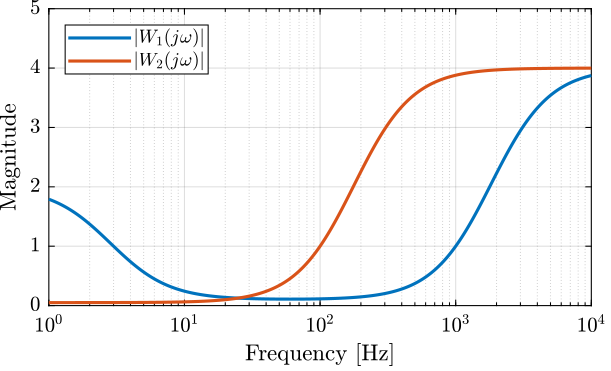
Figure 3: Magnitude of the multiplicative uncertainty weights \(|W_i(j\omega)|\)
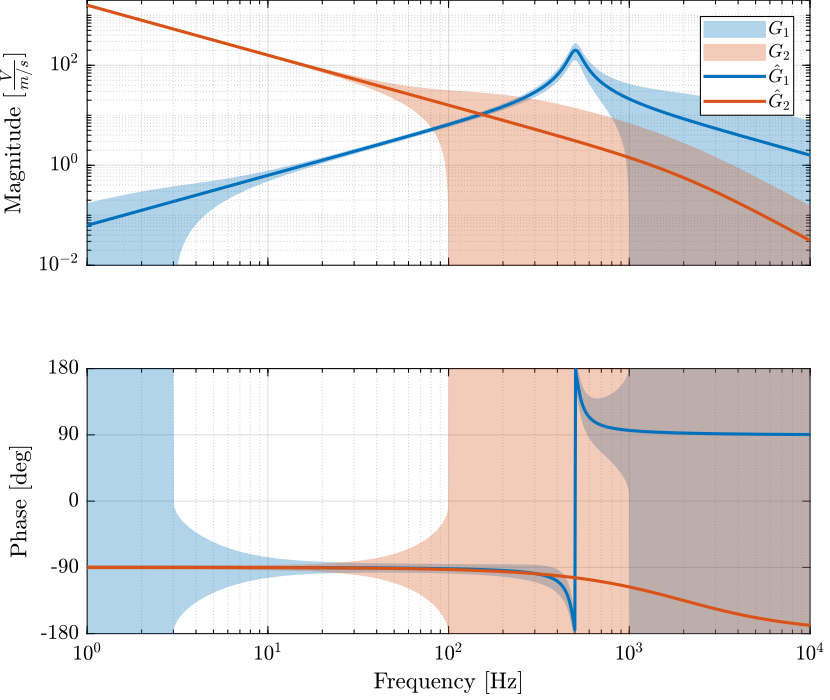
Figure 4: Nominal Sensor Dynamics \(\hat{G}_i\) (solid lines) as well as the spread of the dynamical uncertainty (background color)
1.3 Sensor Noise
The noise of the sensors \(n_i\) are modelled by shaping a white noise with unitary PSD \(\tilde{n}_i\) \eqref{eq:unitary_noise_psd} with a LTI transfer function \(N_i(s)\) (Figure 1).
\begin{equation} \Phi_{\tilde{n}_i}(\omega) = 1 \label{eq:unitary_noise_psd} \end{equation}The Power Spectral Density of the sensor noise \(\Phi_{n_i}(\omega)\) is then computed using \eqref{eq:sensor_noise_shaping} and expressed in \([\frac{(m/s)^2}{Hz}]\).
\begin{equation} \Phi_{n_i}(\omega) = \left| N_i(j\omega) \right|^2 \Phi_{\tilde{n}_i}(\omega) \label{eq:sensor_noise_shaping} \end{equation}The weights \(N_1\) and \(N_2\) representing the amplitude spectral density of the sensor noises are defined below and shown in Figure 5.
omegac = 0.05*2*pi; G0 = 1e-1; Ginf = 1e-6; N1 = (Ginf*s/omegac + G0)/(s/omegac + 1)/(1 + s/2/pi/1e4); omegac = 1000*2*pi; G0 = 1e-6; Ginf = 1e-3; N2 = (Ginf*s/omegac + G0)/(s/omegac + 1)/(1 + s/2/pi/1e4);
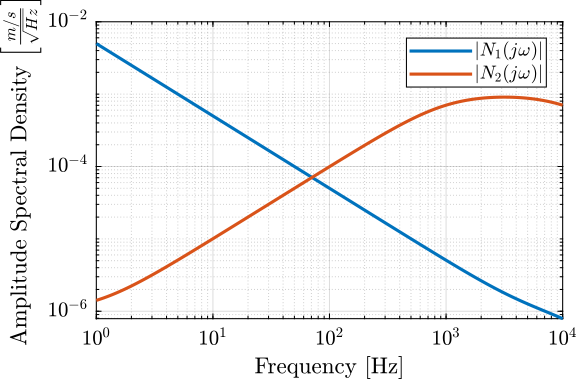
Figure 5: Amplitude spectral density of the sensors \(\sqrt{\Phi_{n_i}(\omega)} = |N_i(j\omega)|\)
1.4 Save Model
All the dynamical systems representing the sensors are saved for further use.
save('./mat/model.mat', 'freqs', 'G1', 'G2', 'N2', 'N1', 'W2', 'W1');
2 Optimal Super Sensor Noise: \(\mathcal{H}_2\) Synthesis with Acc and Pos
The idea is to combine sensors that works in different frequency range using complementary filters.
Doing so, one “super sensor” is obtained that can have better noise characteristics than the individual sensors over a large frequency range.
The complementary filters have to be designed in order to minimize the effect noise of each sensor on the super sensor noise.
The Matlab scripts is accessible here.
2.1 H-Two Synthesis
As \(\tilde{n}_1\) and \(\tilde{n}_2\) are normalized white noise: \(\Phi_{\tilde{n}_1}(\omega) = \Phi_{\tilde{n}_2}(\omega) = 1\) and we have: \[ \sigma_{\hat{x}} = \sqrt{\int_0^\infty |H_1 N_1|^2(\omega) + |H_2 N_2|^2(\omega) d\omega} = \left\| \begin{matrix} H_1 N_1 \\ H_2 N_2 \end{matrix} \right\|_2 \] Thus, the goal is to design \(H_1(s)\) and \(H_2(s)\) such that \(H_1(s) + H_2(s) = 1\) and such that \(\left\| \begin{matrix} H_1 N_1 \\ H_2 N_2 \end{matrix} \right\|_2\) is minimized.
For that, we use the \(\mathcal{H}_2\) Synthesis.
We use the generalized plant architecture shown on figure 6.

Figure 6: \(\mathcal{H}_2\) Synthesis - Generalized plant used for the optimal generation of complementary filters
The transfer function from \([n_1, n_2]\) to \(\hat{x}\) is: \[ \begin{bmatrix} N_1 H_1 \\ N_2 (1 - H_1) \end{bmatrix} \] If we define \(H_2 = 1 - H_1\), we obtain: \[ \begin{bmatrix} N_1 H_1 \\ N_2 H_2 \end{bmatrix} \]
Thus, if we minimize the \(\mathcal{H}_2\) norm of this transfer function, we minimize the RMS value of \(\hat{x}\).
We define the generalized plant \(P\) on matlab as shown on figure 6.
P = [N1 -N1;
0 N2;
1 0];
And we do the \(\mathcal{H}_2\) synthesis using the h2syn command.
[H2, ~, gamma] = h2syn(P, 1, 1);
Finally, we define \(H_2(s) = 1 - H_1(s)\).
H1 = 1 - H2;
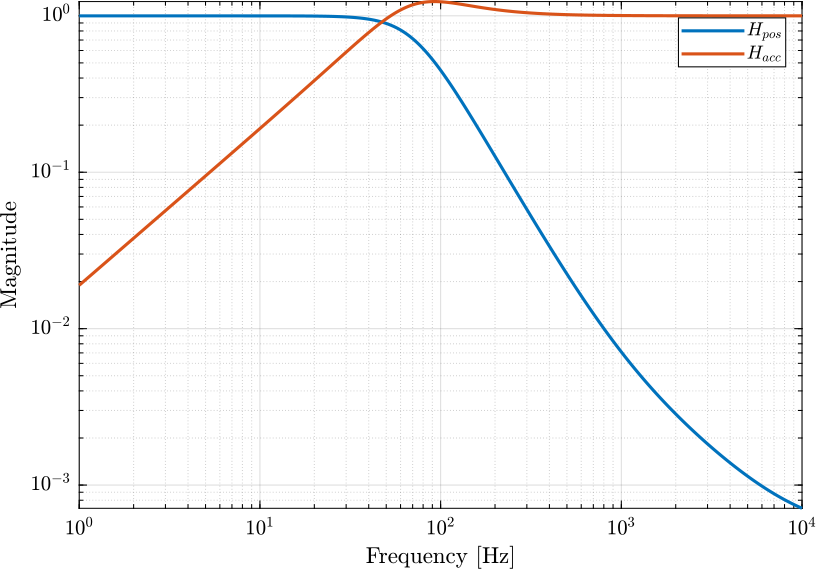
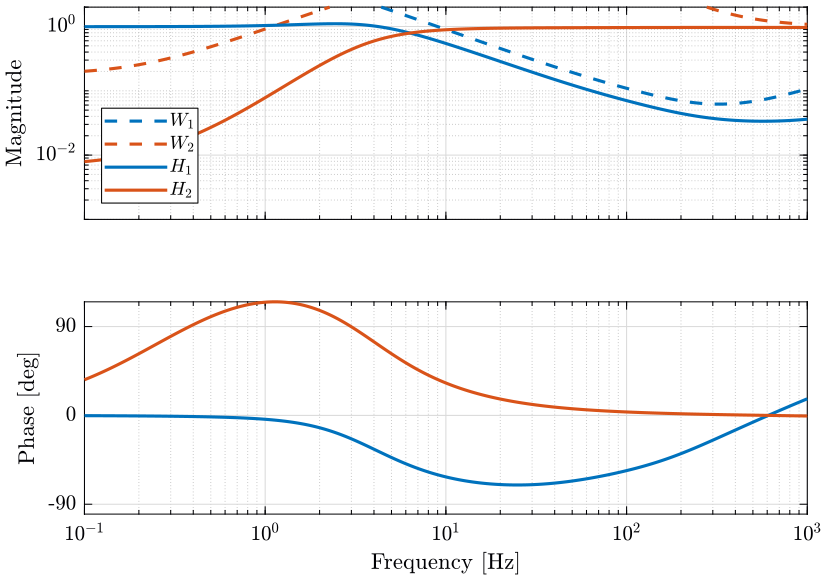
The complementary filters obtained are shown on figure 7.
2.2 Sensor Noise
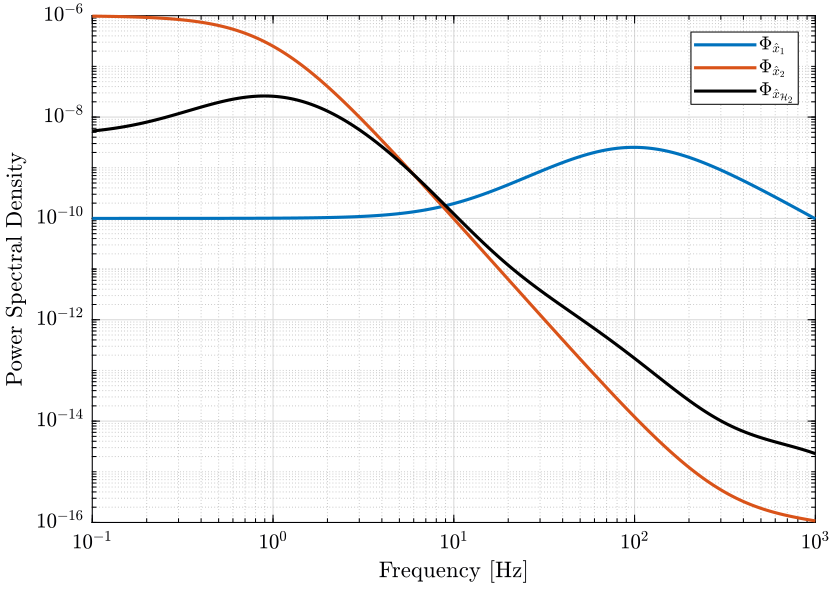
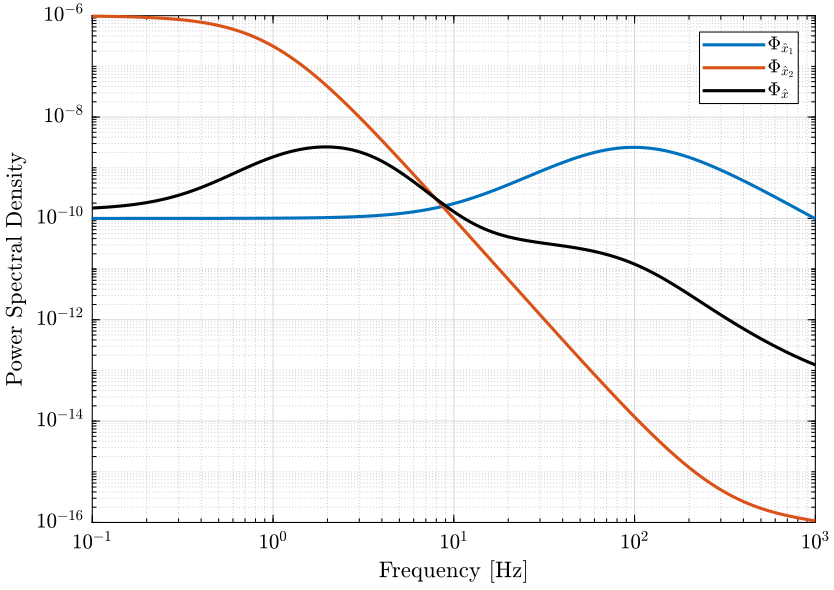
The PSD of the noise of the individual sensor and of the super sensor are shown in Fig. 8.
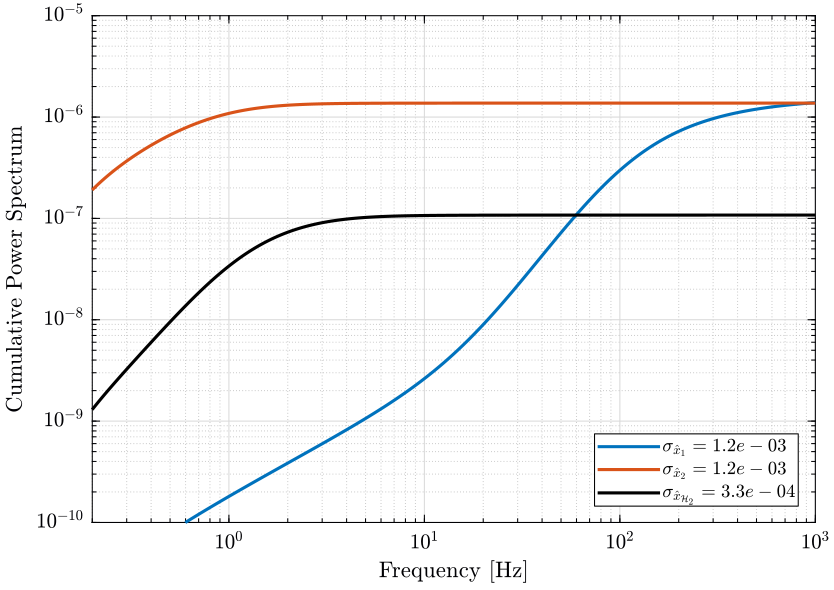
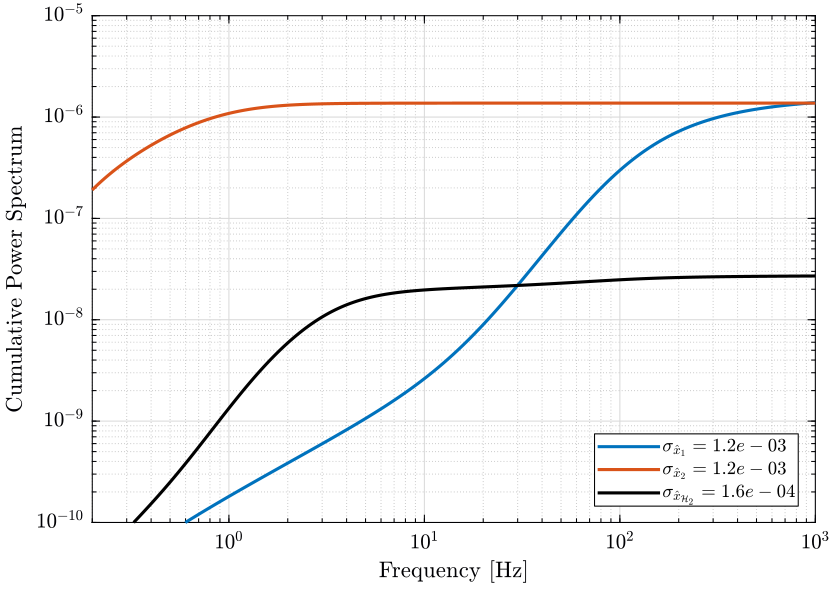
The Cumulative Power Spectrum (CPS) is shown on Fig. 9.
The obtained RMS value of the super sensor is lower than the RMS value of the individual sensors.
PSD_S1 = abs(squeeze(freqresp(N1, freqs, 'Hz'))).^2; PSD_S2 = abs(squeeze(freqresp(N2, freqs, 'Hz'))).^2; PSD_H2 = abs(squeeze(freqresp(N1*H1, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N2*H2, freqs, 'Hz'))).^2; CPS_S1 = cumtrapz(freqs, PSD_S1); CPS_S2 = cumtrapz(freqs, PSD_S2); CPS_H2 = cumtrapz(freqs, PSD_H2);
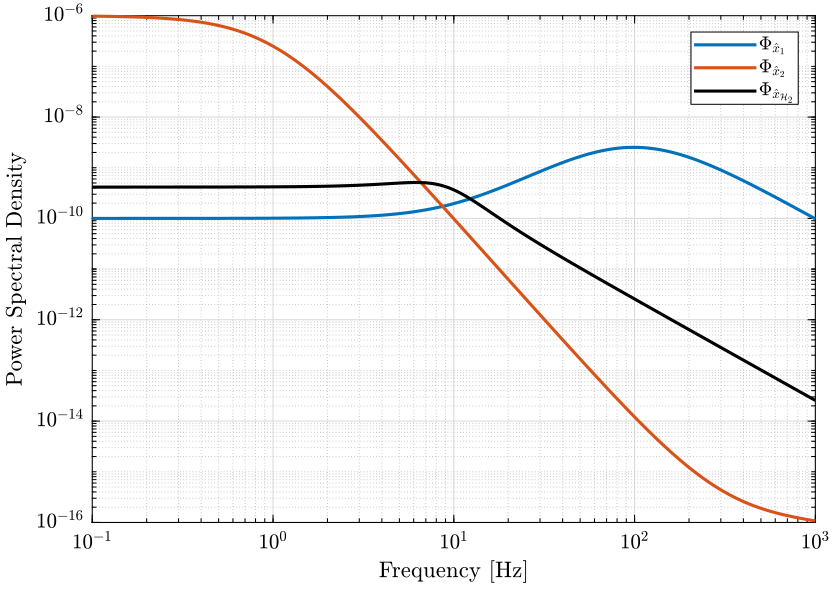
Figure 8: Power Spectral Density of the estimated \(\hat{x}\) using the two sensors alone and using the optimally fused signal (png, pdf)
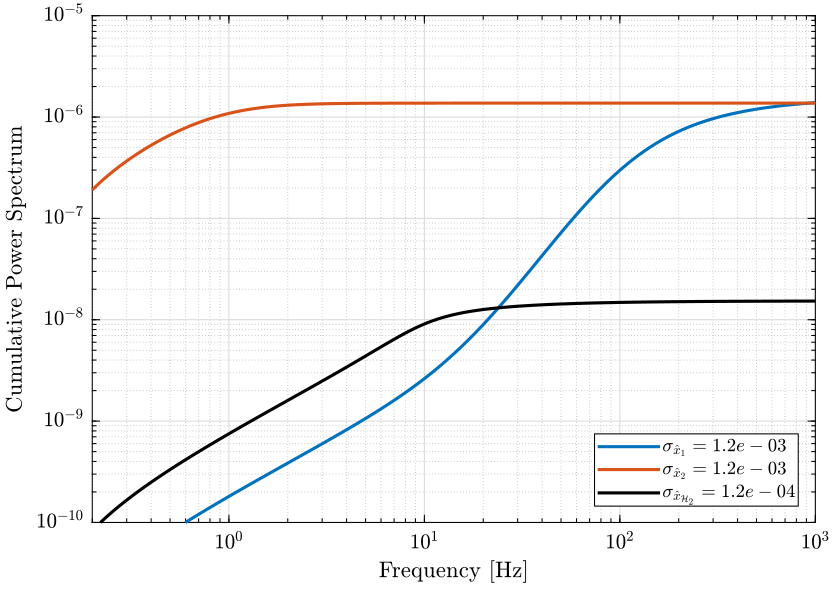
Figure 9: Cumulative Power Spectrum of individual sensors and super sensor using the \(\mathcal{H}_2\) synthesis (png, pdf)
| RMS [m/s] | |
|---|---|
| Integrated Acceleration | 0.005 |
| Derived Position | 0.08 |
| Super Sensor - \(\mathcal{H}_2\) | 0.0012 |
2.3 Time Domain Simulation
Parameters of the time domain simulation.
Fs = 1e4; % Sampling Frequency [Hz] Ts = 1/Fs; % Sampling Time [s] t = 0:Ts:2; % Time Vector [s]
Time domain velocity.
v = 0.1*sin((10*t).*t)';
Generate noises in velocity corresponding to sensor 1 and 2:
n1 = lsim(N1, sqrt(Fs/2)*randn(length(t), 1), t); n2 = lsim(N2, sqrt(Fs/2)*randn(length(t), 1), t);
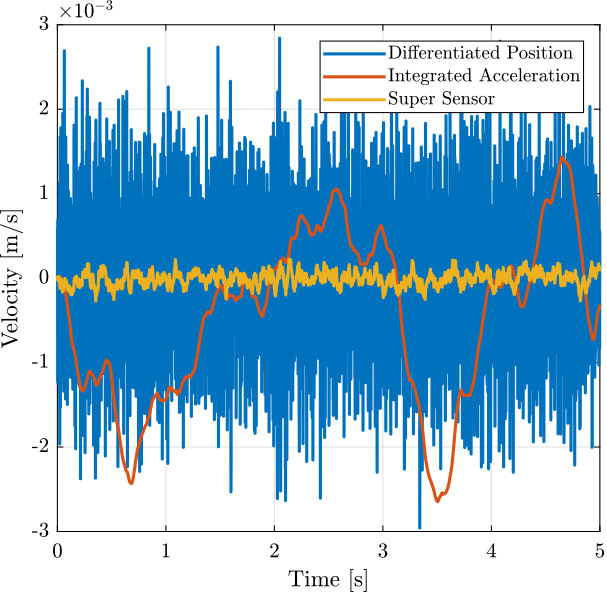
Figure 10: Noise of individual sensors and noise of the super sensor
2.4 Discrepancy between sensor dynamics and model
2.5 Conclusion
From the above complementary filter design with the \(\mathcal{H}_2\) and \(\mathcal{H}_\infty\) synthesis, it still seems that the \(\mathcal{H}_2\) synthesis gives the complementary filters that permits to obtain the minimal super sensor noise (when measuring with the \(\mathcal{H}_2\) norm).
However, the synthesis does not take into account the robustness of the sensor fusion.
3 Robust Sensor Fusion: \(\mathcal{H}_\infty\) Synthesis with Acc and Pos
We initially considered perfectly known sensor dynamics so that it can be perfectly inverted.
We now take into account the fact that the sensor dynamics is only partially known. To do so, we model the uncertainty that we have on the sensor dynamics by multiplicative input uncertainty as shown in Fig. 11.

Figure 11: Sensor fusion architecture with sensor dynamics uncertainty
The objective here is to design complementary filters \(H_1(s)\) and \(H_2(s)\) in order to minimize the dynamical uncertainty of the super sensor.
The Matlab scripts is accessible here.
3.1 Super Sensor Dynamical Uncertainty
In practical systems, the sensor dynamics has always some level of uncertainty. Let’s represent that with multiplicative input uncertainty as shown on figure 11.
Figure 12: Fusion of two sensors with input multiplicative uncertainty
The dynamics of the super sensor is represented by
\begin{align*} \frac{\hat{x}}{x} &= (1 + W_1 \Delta_1) H_1 + (1 + W_2 \Delta_2) H_2 \\ &= 1 + W_1 H_1 \Delta_1 + W_2 H_2 \Delta_2 \end{align*}with \(\Delta_i\) is any transfer function satisfying \(\| \Delta_i \|_\infty < 1\).
We see that as soon as we have some uncertainty in the sensor dynamics, we have that the complementary filters have some effect on the transfer function from \(x\) to \(\hat{x}\).
The uncertainty set of the transfer function from \(\hat{x}\) to \(x\) at frequency \(\omega\) is bounded in the complex plane by a circle centered on 1 and with a radius equal to \(|W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)|\) (figure 13).
We then have that the angle introduced by the super sensor is bounded by \(\arcsin(\epsilon)\): \[ \angle \frac{\hat{x}}{x}(j\omega) \le \arcsin \Big(|W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)|\Big) \]

Figure 13: Maximum phase variation
3.2 Synthesis objective
The uncertainty region of the super sensor dynamics is represented by a circle in the complex plane as shown in Fig. 13.
At each frequency \(\omega\), the radius of the circle is \(|W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)|\).
Thus, the phase shift \(\Delta\phi(\omega)\) due to the super sensor uncertainty is bounded by: \[ |\Delta\phi(\omega)| \leq \arcsin\big( |W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)| \big) \]
Let’s define some allowed frequency depend phase shift \(\Delta\phi_\text{max}(\omega) > 0\) such that: \[ |\Delta\phi(\omega)| < \Delta\phi_\text{max}(\omega), \quad \forall\omega \]
If \(H_1(s)\) and \(H_2(s)\) are designed such that \[ |W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)| < \sin\big( \Delta\phi_\text{max}(\omega) \big) \]
The maximum phase shift due to dynamic uncertainty at frequency \(\omega\) will be \(\Delta\phi_\text{max}(\omega)\).
3.3 Requirements as an \(\mathcal{H}_\infty\) norm
We now try to express this requirement in terms of an \(\mathcal{H}_\infty\) norm.
Let’s define one weight \(W_\phi(s)\) that represents the maximum wanted phase uncertainty: \[ |W_{\phi}(j\omega)|^{-1} \approx \sin(\Delta\phi_{\text{max}}(\omega)), \quad \forall\omega \]
Then:
\begin{align*} & |W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)| < \sin\big( \Delta\phi_\text{max}(\omega) \big), \quad \forall\omega \\ \Longleftrightarrow & |W_1(j\omega) H_1(j\omega)| + |W_2(j\omega) H_2(j\omega)| < |W_\phi(j\omega)|^{-1}, \quad \forall\omega \\ \Longleftrightarrow & \left| W_1(j\omega) H_1(j\omega) W_\phi(j\omega) \right| + \left| W_2(j\omega) H_2(j\omega) W_\phi(j\omega) \right| < 1, \quad \forall\omega \end{align*}Which is approximately equivalent to (with an error of maximum \(\sqrt{2}\)):
\begin{equation} \label{org829e35c} \left\| \begin{matrix} W_1(s) W_\phi(s) H_1(s) \\ W_2(s) W_\phi(s) H_2(s) \end{matrix} \right\|_\infty < 1 \end{equation}One should not forget that at frequency where both sensors has unknown dynamics (\(|W_1(j\omega)| > 1\) and \(|W_2(j\omega)| > 1\)), the super sensor dynamics will also be unknown and the phase uncertainty cannot be bounded. Thus, at these frequencies, \(|W_\phi|\) should be smaller than \(1\).
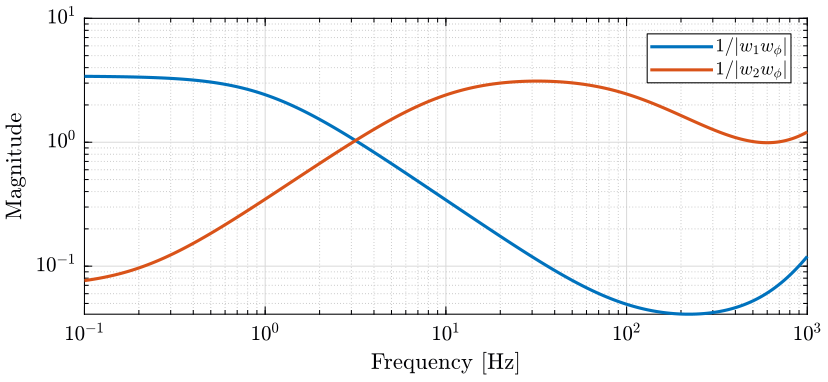
3.4 Weighting Function used to bound the super sensor uncertainty
Let’s define \(W_\phi(s)\) in order to bound the maximum allowed phase uncertainty \(\Delta\phi_\text{max}\) of the super sensor dynamics.
Dphi = 10; % [deg]
Wu = createWeight('n', 2, 'w0', 2*pi*4e2, 'G0', 1/sin(Dphi*pi/180), 'G1', 1/4, 'Gc', 1);
save('./mat/Wu.mat', 'Wu');
The obtained upper bounds on the complementary filters in order to limit the phase uncertainty of the super sensor are represented in Fig. 14.
3.5 \(\mathcal{H}_\infty\) Synthesis
The \(\mathcal{H}_\infty\) synthesis architecture used for the complementary filters is shown in Fig. 15.

Figure 15: Architecture used for \(\mathcal{H}_\infty\) synthesis of complementary filters
The generalized plant is defined below.
P = [Wu*W1 -Wu*W1;
0 Wu*W2;
1 0];
And we do the \(\mathcal{H}_\infty\) synthesis using the hinfsyn command.
[H2, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
[H2, ~, gamma, ~] = hinfsyn(P, 1, 1,'TOLGAM', 0.001, 'METHOD', 'ric', 'DISPLAY', 'on');
Test bounds: 0.7071 <= gamma <= 1.291
gamma X>=0 Y>=0 rho(XY)<1 p/f
9.554e-01 0.0e+00 0.0e+00 3.529e-16 p
8.219e-01 0.0e+00 0.0e+00 5.204e-16 p
7.624e-01 3.8e-17 0.0e+00 1.955e-15 p
7.342e-01 0.0e+00 0.0e+00 5.612e-16 p
7.205e-01 0.0e+00 0.0e+00 7.184e-16 p
7.138e-01 0.0e+00 0.0e+00 0.000e+00 p
7.104e-01 4.1e-16 0.0e+00 6.749e-15 p
7.088e-01 0.0e+00 0.0e+00 2.794e-15 p
7.079e-01 0.0e+00 0.0e+00 6.503e-16 p
7.075e-01 0.0e+00 0.0e+00 4.302e-15 p
Best performance (actual): 0.7071
And \(H_1(s)\) is defined as the complementary of \(H_2(s)\).
H1 = 1 - H2;
The obtained complementary filters are shown in Fig. 16.
3.6 Super sensor uncertainty
H2_filters = load('./mat/H2_filters.mat', 'H2', 'H1');
The uncertainty of the super sensor cannot be made smaller than both the individual sensor. Ideally, it would follow the minimum uncertainty of both sensors.
We here just used very wimple weights. For instance, we could improve the dynamical uncertainty of the super sensor by making \(|W_\phi(j\omega)|\) smaller bellow 2Hz where the dynamical uncertainty of the sensor 1 is small.
3.7 Super sensor noise
We now compute the obtain Power Spectral Density of the super sensor’s noise. The noise characteristics of both individual sensor are defined below.
The PSD of both sensor and of the super sensor is shown in Fig. 17. The CPS of both sensor and of the super sensor is shown in Fig. 18.
PSD_S2 = abs(squeeze(freqresp(N2, freqs, 'Hz'))).^2; PSD_S1 = abs(squeeze(freqresp(N1, freqs, 'Hz'))).^2; PSD_Hinf = abs(squeeze(freqresp(N1*H1, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N2*H2, freqs, 'Hz'))).^2; PSD_H2 = abs(squeeze(freqresp(N1*H2_filters.H1, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N2*H2_filters.H2, freqs, 'Hz'))).^2; CPS_S2 = cumtrapz(freqs, PSD_S2); CPS_S1 = cumtrapz(freqs, PSD_S1); CPS_Hinf = cumtrapz(freqs, PSD_Hinf); CPS_H2 = cumtrapz(freqs, PSD_H2);
3.8 Conclusion
Using the \(\mathcal{H}_\infty\) synthesis, the dynamical uncertainty of the super sensor can be bounded to acceptable values.
However, the RMS of the super sensor noise is not optimized as it was the case with the \(\mathcal{H}_2\) synthesis
4 Optimal and Robust Sensor Fusion: Mixed \(\mathcal{H}_2/\mathcal{H}_\infty\) Synthesis with Acc and Pos
The Matlab scripts is accessible here.
4.1 Mixed \(\mathcal{H}_2\) / \(\mathcal{H}_\infty\) Synthesis - Introduction
The goal is to design complementary filters such that:
- the maximum uncertainty of the super sensor is bounded
- the RMS value of the super sensor noise is minimized
To do so, we can use the Mixed \(\mathcal{H}_2\) / \(\mathcal{H}_\infty\) Synthesis.
The Matlab function for that is h2hinfsyn (doc).
4.2 Noise characteristics and Uncertainty of the individual sensors
4.3 Weighting Functions on the uncertainty of the super sensor
We design weights for the \(\mathcal{H}_\infty\) part of the synthesis in order to limit the dynamical uncertainty of the super sensor. The maximum wanted multiplicative uncertainty is shown in Fig. .The idea here is that we don’t really need low uncertainty at low frequency but only near the crossover frequency that is suppose to be around 300Hz here.
4.4 Mixed \(\mathcal{H}_2\) / \(\mathcal{H}_\infty\) Synthesis
The synthesis architecture that is used here is shown in Fig. 20.
The controller \(K\) is synthesized such that it:
- Keeps the \(\mathcal{H}_\infty\) norm \(G\) of the transfer function from \(w\) to \(z_\infty\) bellow some specified value
- Keeps the \(\mathcal{H}_2\) norm \(H\) of the transfer function from \(w\) to \(z_2\) bellow some specified value
- Minimizes a trade-off criterion of the form \(W_1 G^2 + W_2 H^2\) where \(W_1\) and \(W_2\) are specified values

Figure 20: Mixed H2/H-Infinity Synthesis
Here, we define \(P\) such that:
\begin{align*} \left\| \frac{z_\infty}{w} \right\|_\infty &= \left\| \begin{matrix}W_1(s) H_1(s) \\ W_2(s) H_2(s)\end{matrix} \right\|_\infty \\ \left\| \frac{z_2}{w} \right\|_2 &= \left\| \begin{matrix}N_1(s) H_1(s) \\ N_2(s) H_2(s)\end{matrix} \right\|_2 \end{align*}Then:
- we specify the maximum value for the \(\mathcal{H}_\infty\) norm between \(w\) and \(z_\infty\) to be \(1\)
- we don’t specify any maximum value for the \(\mathcal{H}_2\) norm between \(w\) and \(z_2\)
- we choose \(W_1 = 0\) and \(W_2 = 1\) such that the objective is to minimize the \(\mathcal{H}_2\) norm between \(w\) and \(z_2\)
The synthesis objective is to have: \[ \left\| \frac{z_\infty}{w} \right\|_\infty = \left\| \begin{matrix}W_1(s) H_1(s) \\ W_2(s) H_2(s)\end{matrix} \right\|_\infty < 1 \] and to minimize: \[ \left\| \frac{z_2}{w} \right\|_2 = \left\| \begin{matrix}N_1(s) H_1(s) \\ N_2(s) H_2(s)\end{matrix} \right\|_2 \] which is what we wanted.
We define the generalized plant that will be used for the mixed synthesis.
W1u = ss(W2*Wu); W2u = ss(W1*Wu); % Weight on the uncertainty
W1n = ss(N2); W2n = ss(N1); % Weight on the noise
P = [W1u -W1u;
0 W2u;
W1n -W1n;
0 W2n;
1 0];
The mixed \(\mathcal{H}_2/\mathcal{H}_\infty\) synthesis is performed below.
Nmeas = 1; Ncon = 1; Nz2 = 2; [H1, ~, normz, ~] = h2hinfsyn(P, Nmeas, Ncon, Nz2, [0, 1], 'HINFMAX', 1, 'H2MAX', Inf, 'DKMAX', 100, 'TOL', 0.01, 'DISPLAY', 'on'); H2 = 1 - H1;
The obtained complementary filters are shown in Fig. 21.
4.5 Obtained Super Sensor’s noise
The PSD and CPS of the super sensor’s noise are shown in Fig. 22 and Fig. 23 respectively.
PSD_S2 = abs(squeeze(freqresp(N2, freqs, 'Hz'))).^2; PSD_S1 = abs(squeeze(freqresp(N1, freqs, 'Hz'))).^2; PSD_H2Hinf = abs(squeeze(freqresp(N1*H1, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N2*H2, freqs, 'Hz'))).^2; CPS_S2 = cumtrapz(freqs, PSD_S2); CPS_S1 = cumtrapz(freqs, PSD_S1); CPS_H2Hinf = cumtrapz(freqs, PSD_H2Hinf);
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4.6 Obtained Super Sensor’s Uncertainty
The uncertainty on the super sensor’s dynamics is shown in Fig.
4.7 Comparison Hinf H2 H2/Hinf
H2_filters = load('./mat/H2_filters.mat', 'H2', 'H1');
Hinf_filters = load('./mat/Hinf_filters.mat', 'H2', 'H1');
H2_Hinf_filters = load('./mat/H2_Hinf_filters.mat', 'H2', 'H1');
PSD_H2 = abs(squeeze(freqresp(N2*H2_filters.H2, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N1*H2_filters.H1, freqs, 'Hz'))).^2; CPS_H2 = cumtrapz(freqs, PSD_H2); PSD_Hinf = abs(squeeze(freqresp(N2*Hinf_filters.H2, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N1*Hinf_filters.H1, freqs, 'Hz'))).^2; CPS_Hinf = cumtrapz(freqs, PSD_Hinf); PSD_H2Hinf = abs(squeeze(freqresp(N2*H2_Hinf_filters.H2, freqs, 'Hz'))).^2+abs(squeeze(freqresp(N1*H2_Hinf_filters.H1, freqs, 'Hz'))).^2; CPS_H2Hinf = cumtrapz(freqs, PSD_H2Hinf);
| RMS [m/s] | |
|---|---|
| Optimal: \(\mathcal{H}_2\) | 0.0012 |
| Robust: \(\mathcal{H}_\infty\) | 0.041 |
| Mixed: \(\mathcal{H}_2/\mathcal{H}_\infty\) | 0.011 |
4.8 Conclusion
This synthesis methods allows both to:
- limit the dynamical uncertainty of the super sensor
- minimize the RMS value of the estimation
5 Functions
5.1 createWeight
This Matlab function is accessible here.
function [W] = createWeight(args)
% createWeight -
%
% Syntax: [in_data] = createWeight(in_data)
%
% Inputs:
% - n - Weight Order
% - G0 - Low frequency Gain
% - G1 - High frequency Gain
% - Gc - Gain of W at frequency w0
% - w0 - Frequency at which |W(j w0)| = Gc
%
% Outputs:
% - W - Generated Weight
arguments
args.n (1,1) double {mustBeInteger, mustBePositive} = 1
args.G0 (1,1) double {mustBeNumeric, mustBePositive} = 0.1
args.G1 (1,1) double {mustBeNumeric, mustBePositive} = 10
args.Gc (1,1) double {mustBeNumeric, mustBePositive} = 1
args.w0 (1,1) double {mustBeNumeric, mustBePositive} = 1
end
mustBeBetween(args.G0, args.Gc, args.G1);
s = tf('s');
W = (((1/args.w0)*sqrt((1-(args.G0/args.Gc)^(2/args.n))/(1-(args.Gc/args.G1)^(2/args.n)))*s + (args.G0/args.Gc)^(1/args.n))/((1/args.G1)^(1/args.n)*(1/args.w0)*sqrt((1-(args.G0/args.Gc)^(2/args.n))/(1-(args.Gc/args.G1)^(2/args.n)))*s + (1/args.Gc)^(1/args.n)))^args.n;
end
% Custom validation function
function mustBeBetween(a,b,c)
if ~((a > b && b > c) || (c > b && b > a))
eid = 'createWeight:inputError';
msg = 'Gc should be between G0 and G1.';
throwAsCaller(MException(eid,msg))
end
end
5.2 plotMagUncertainty
This Matlab function is accessible here.
function [p] = plotMagUncertainty(W, freqs, args)
% plotMagUncertainty -
%
% Syntax: [p] = plotMagUncertainty(W, freqs, args)
%
% Inputs:
% - W - Multiplicative Uncertainty Weight
% - freqs - Frequency Vector [Hz]
% - args - Optional Arguments:
% - G
% - color_i
% - opacity
%
% Outputs:
% - p - Plot Handle
arguments
W
freqs double {mustBeNumeric, mustBeNonnegative}
args.G = tf(1)
args.color_i (1,1) double {mustBeInteger, mustBePositive} = 1
args.opacity (1,1) double {mustBeNumeric, mustBePositive} = 0.3
args.DisplayName char = ''
end
% Get defaults colors
colors = get(groot, 'defaultAxesColorOrder');
p = patch([freqs flip(freqs)], ...
[abs(squeeze(freqresp(args.G, freqs, 'Hz'))).*(1 + abs(squeeze(freqresp(W, freqs, 'Hz')))); ...
flip(abs(squeeze(freqresp(args.G, freqs, 'Hz'))).*max(1 - abs(squeeze(freqresp(W, freqs, 'Hz'))), 1e-6))], 'w', ...
'DisplayName', args.DisplayName);
p.FaceColor = colors(args.color_i, :);
p.EdgeColor = 'none';
p.FaceAlpha = args.opacity;
end
5.3 plotPhaseUncertainty
This Matlab function is accessible here.
function [p] = plotPhaseUncertainty(W, freqs, args)
% plotPhaseUncertainty -
%
% Syntax: [p] = plotPhaseUncertainty(W, freqs, args)
%
% Inputs:
% - W - Multiplicative Uncertainty Weight
% - freqs - Frequency Vector [Hz]
% - args - Optional Arguments:
% - G
% - color_i
% - opacity
%
% Outputs:
% - p - Plot Handle
arguments
W
freqs double {mustBeNumeric, mustBeNonnegative}
args.G = tf(1)
args.color_i (1,1) double {mustBeInteger, mustBePositive} = 1
args.opacity (1,1) double {mustBeNumeric, mustBePositive} = 0.3
args.DisplayName char = ''
end
% Get defaults colors
colors = get(groot, 'defaultAxesColorOrder');
% Compute Phase Uncertainty
Dphi = 180/pi*asin(abs(squeeze(freqresp(W, freqs, 'Hz'))));
Dphi(abs(squeeze(freqresp(W, freqs, 'Hz'))) > 1) = 360;
% Compute Plant Phase
G_ang = 180/pi*angle(squeeze(freqresp(args.G, freqs, 'Hz')));
p = patch([freqs flip(freqs)], [G_ang+Dphi; flip(G_ang-Dphi)], 'w', ...
'DisplayName', args.DisplayName);
p.FaceColor = colors(args.color_i, :);
p.EdgeColor = 'none';
p.FaceAlpha = args.opacity;
end