ESRF Double Crystal Monochromator - Dynamical Multi-Body Model
Table of Contents
This report is also available as a pdf.
In this document, a Simscape (.e.g. multi-body) model of the ESRF Double Crystal Monochromator (DCM) is presented and used to develop and optimize the control strategy.
It is structured as follow:
- Section 1: the kinematics of the DCM is presented, and Jacobian matrices which are used to solve the inverse and forward kinematics are computed.
- Section 2: the system dynamics is identified in the absence of control.
- Section 3: an open-loop noise budget is performed.
- Section 4: it is studied whether if the strain gauges fixed to the piezoelectric actuators can be used to actively damp the plant.
- Section 5: piezoelectric force sensors are added in series with the piezoelectric actuators and are used to actively damp the plant using the Integral Force Feedback (IFF) control strategy.
- Section 6: the High Authority Control - Low Authority Control (HAC-LAC) strategy is tested on the Simscape model.
1. System Kinematics
1.1. Bragg Angle
There is a simple relation eq:bragg_angle_formula between:
- \(d_{\text{off}}\) is the wanted offset between the incident x-ray and the output x-ray
- \(\theta_b\) is the bragg angle
- \(d_z\) is the corresponding distance between the first and second crystals
This relation is shown in Figure 1.
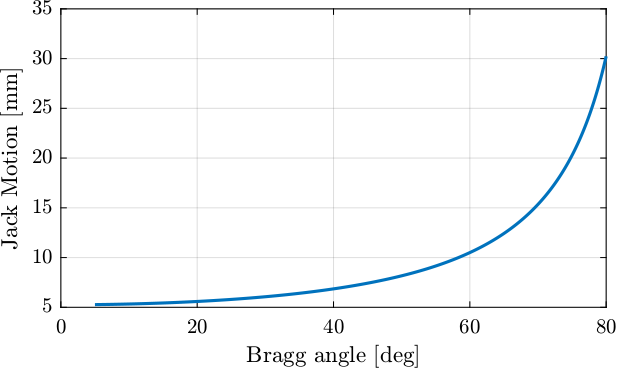
Figure 1: Jack motion as a function of Bragg angle
The required jack stroke is approximately 25mm.
%% Required Jack stroke ans = 1e3*(dz(end) - dz(1))
24.963
1.2. Kinematics (111 Crystal)
The reference frame is taken at the center of the 111 second crystal.
1.2.1. Interferometers - 111 Crystal
Three interferometers are pointed to the bottom surface of the 111 crystal.
The position of the measurement points are shown in Figure 2 as well as the origin where the motion of the crystal is computed.
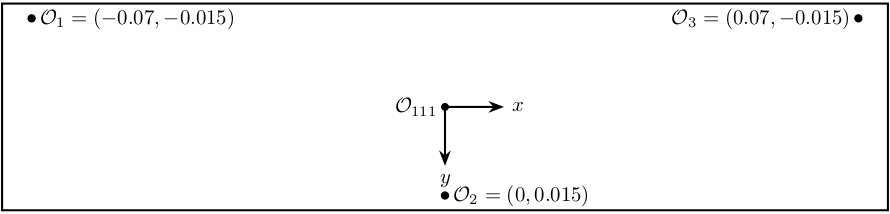
Figure 2: Bottom view of the second crystal 111. Position of the measurement points.
The inverse kinematics consisting of deriving the interferometer measurements from the motion of the crystal (see Figure 3):
\begin{equation} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \bm{J}_{s,111} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} \end{equation}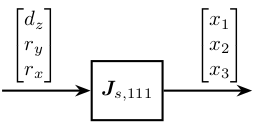
Figure 3: Inverse Kinematics - Interferometers
From the Figure 2, the inverse kinematics can be solved as follow (for small motion):
\begin{equation} \bm{J}_{s,111} = \begin{bmatrix} 1 & 0.07 & -0.015 \\ 1 & 0 & 0.015 \\ 1 & -0.07 & -0.015 \end{bmatrix} \end{equation}%% Sensor Jacobian matrix for 111 crystal J_s_111 = [1, 0.07, -0.015 1, 0, 0.015 1, -0.07, -0.015];
| 1.0 | 0.07 | -0.015 |
| 1.0 | 0.0 | 0.015 |
| 1.0 | -0.07 | -0.015 |
The forward kinematics is solved by inverting the Jacobian matrix (see Figure 4).
\begin{equation} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} = \bm{J}_{s,111}^{-1} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} \end{equation}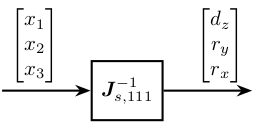
Figure 4: Forward Kinematics - Interferometers
| 0.25 | 0.5 | 0.25 |
| 7.14 | 0.0 | -7.14 |
| -16.67 | 33.33 | -16.67 |
1.2.2. Piezo - 111 Crystal
The location of the actuators with respect with the center of the 111 second crystal are shown in Figure 5.
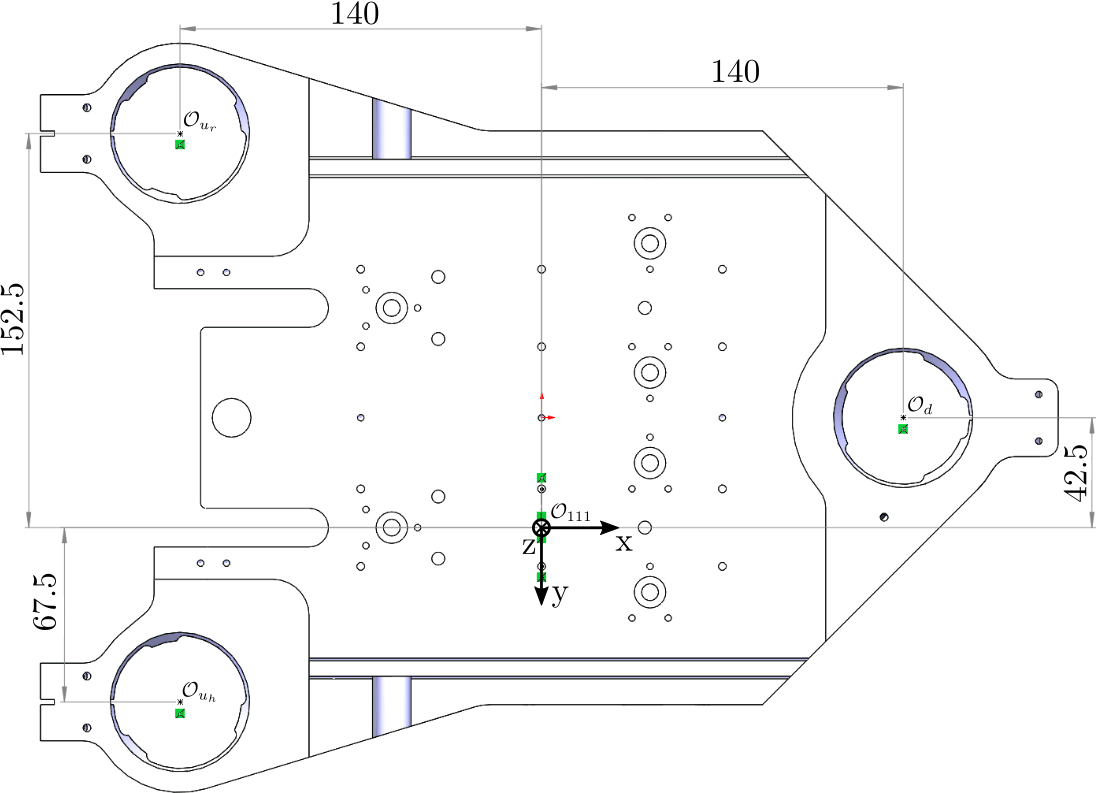
Figure 5: Location of actuators with respect to the center of the 111 second crystal (bottom view)
Inverse Kinematics consist of deriving the axial (z) motion of the 3 actuators from the motion of the crystal’s center.
\begin{equation} \begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_{d} \end{bmatrix} = \bm{J}_{a,111} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} \end{equation}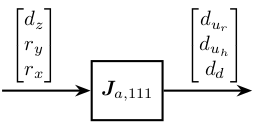
Figure 6: Inverse Kinematics - Actuators
Based on the geometry in Figure 5, we obtain:
\begin{equation} \bm{J}_{a,111} = \begin{bmatrix} 1 & 0.14 & -0.1525 \\ 1 & 0.14 & 0.0675 \\ 1 & -0.14 & -0.0425 \end{bmatrix} \end{equation}%% Actuator Jacobian - 111 crystal J_a_111 = [1, 0.14, -0.1525 1, 0.14, 0.0675 1, -0.14, -0.0425];
| 1.0 | 0.14 | -0.1525 |
| 1.0 | 0.14 | 0.0675 |
| 1.0 | -0.14 | -0.0425 |
The forward Kinematics is solved by inverting the Jacobian matrix:
\begin{equation} \begin{bmatrix} d_z \\ r_y \\ r_x \end{bmatrix} = \bm{J}_{a,111}^{-1} \begin{bmatrix} d_{u_r} \\ d_{u_h} \\ d_{d} \end{bmatrix} \end{equation}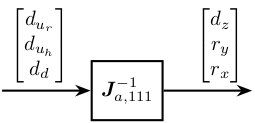
Figure 7: Forward Kinematics - Actuators for 111 crystal
| 0.0568 | 0.4432 | 0.5 |
| 1.7857 | 1.7857 | -3.5714 |
| -4.5455 | 4.5455 | 0.0 |
1.3. Save Kinematics
save('mat/dcm_kinematics.mat', 'J_a_111', 'J_s_111')
2. Open Loop System Identification
2.1. Identification
Let’s considered the system \(\bm{G}(s)\) with:
- 3 inputs: force applied to the 3 fast jacks
- 3 outputs: measured displacement by the 3 interferometers pointing at the 111 second crystal
It is schematically shown in Figure 8.
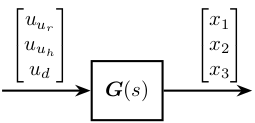
Figure 8: Dynamical system with inputs and outputs
The system is identified from the Simscape model.
%% Input/Output definition clear io; io_i = 1; %% Inputs % Control Input {3x1} [N] io(io_i) = linio([mdl, '/control_system'], 1, 'openinput'); io_i = io_i + 1; %% Outputs % Interferometers {3x1} [m] io(io_i) = linio([mdl, '/DCM'], 1, 'openoutput'); io_i = io_i + 1;
%% Extraction of the dynamics
G = linearize(mdl, io);
size(G)
size(G) State-space model with 3 outputs, 3 inputs, and 24 states.
2.2. Plant in the frame of the fastjacks
load('dcm_kinematics.mat');
Using the forward and inverse kinematics, we can computed the dynamics from piezo forces to axial motion of the 3 fastjacks (see Figure 9).
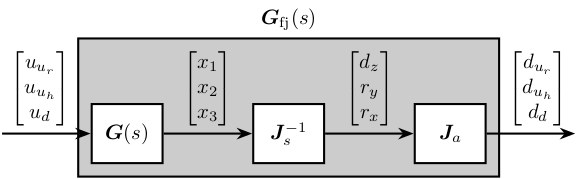
Figure 9: Use of Jacobian matrices to obtain the system in the frame of the fastjacks
%% Compute the system in the frame of the fastjacks G_pz = J_a_111*inv(J_s_111)*G;
The DC gain of the new system shows that the system is well decoupled at low frequency.
dcgain(G_pz)
| 4.4407e-09 | 2.7656e-12 | 1.0132e-12 |
| 2.7656e-12 | 4.4407e-09 | 1.0132e-12 |
| 1.0109e-12 | 1.0109e-12 | 4.4424e-09 |
The bode plot of \(\bm{G}_{\text{fj}}(s)\) is shown in Figure 10.
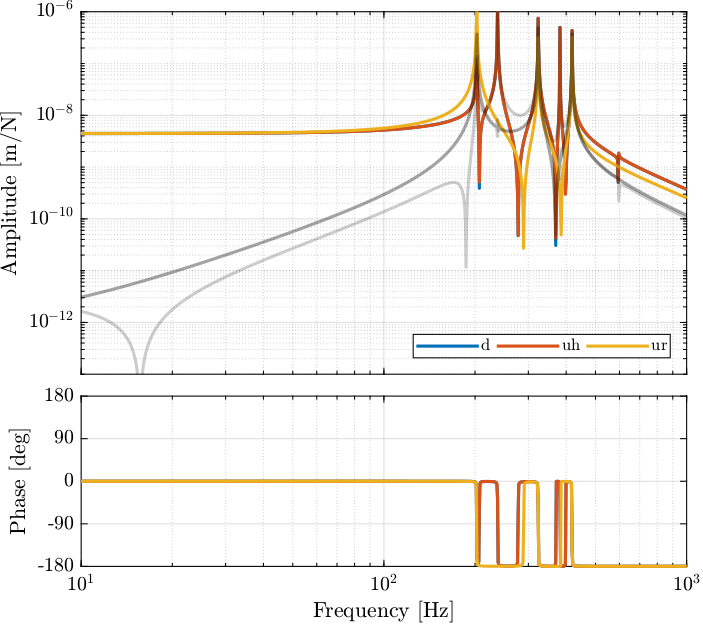
Figure 10: Bode plot of the diagonal and off-diagonal elements of the plant in the frame of the fast jacks
Computing the system in the frame of the fastjack gives good decoupling at low frequency (until the first resonance of the system).
2.3. Plant in the frame of the crystal
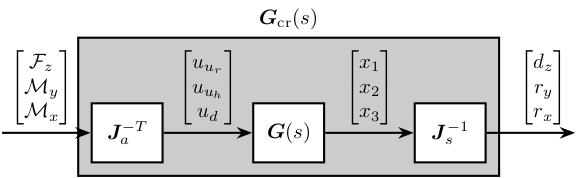
Figure 11: Use of Jacobian matrices to obtain the system in the frame of the crystal
G_mr = inv(J_s_111)*G*inv(J_a_111');
dcgain(G_mr)
| 1.9978e-09 | 3.9657e-09 | 7.7944e-09 |
| 3.9656e-09 | 8.4979e-08 | -1.5135e-17 |
| 7.7944e-09 | -3.9252e-17 | 1.834e-07 |
This results in a coupled system. The main reason is that, as we map forces to the center of the 111 crystal and not at the center of mass/stiffness of the moving part, vertical forces will induce rotation and torques will induce vertical motion.
3. Open-Loop Noise Budgeting
3.1. Power Spectral Density of signals
Interferometer noise:
Wn = 6e-11*(1 + s/2/pi/200)/(1 + s/2/pi/60); % m/sqrt(Hz)
Measurement noise: 0.79 [nm,rms]
DAC noise (amplified by the PI voltage amplifier, and converted to newtons):
Wdac = tf(3e-8); % V/sqrt(Hz) Wu = Wdac*22.5*10; % N/sqrt(Hz)
DAC noise: 0.95 [uV,rms]
Disturbances:
Wd = 5e-7/(1 + s/2/pi); % m/sqrt(Hz)
Disturbance motion: 0.61 [um,rms]
%% Save ASD of noise and disturbances save('mat/asd_noises_disturbances.mat', 'Wn', 'Wu', 'Wd');
3.2. Open Loop disturbance and measurement noise
The comparison of the amplitude spectral density of the measurement noise and of the jack parasitic motion is performed in Figure 13. It confirms that the sensor noise is low enough to measure the motion errors of the crystal.
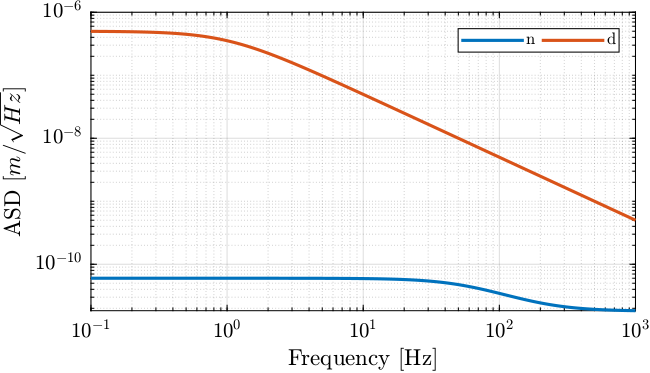
Figure 13: Open Loop noise budgeting
4. Active Damping Plant (Strain gauges)
In this section, we wish to see whether if strain gauges fixed to the piezoelectric actuator can be used for active damping.
4.1. Identification
%% Input/Output definition clear io; io_i = 1; %% Inputs % Control Input {3x1} [N] io(io_i) = linio([mdl, '/control_system'], 1, 'openinput'); io_i = io_i + 1; %% Outputs % Strain Gauges {3x1} [m] io(io_i) = linio([mdl, '/DCM'], 2, 'openoutput'); io_i = io_i + 1;
%% Extraction of the dynamics
G_sg = linearize(mdl, io);
dcgain(G_sg)
| 4.4443e-09 | 1.0339e-13 | 3.774e-14 |
| 1.0339e-13 | 4.4443e-09 | 3.774e-14 |
| 3.7792e-14 | 3.7792e-14 | 4.4444e-09 |
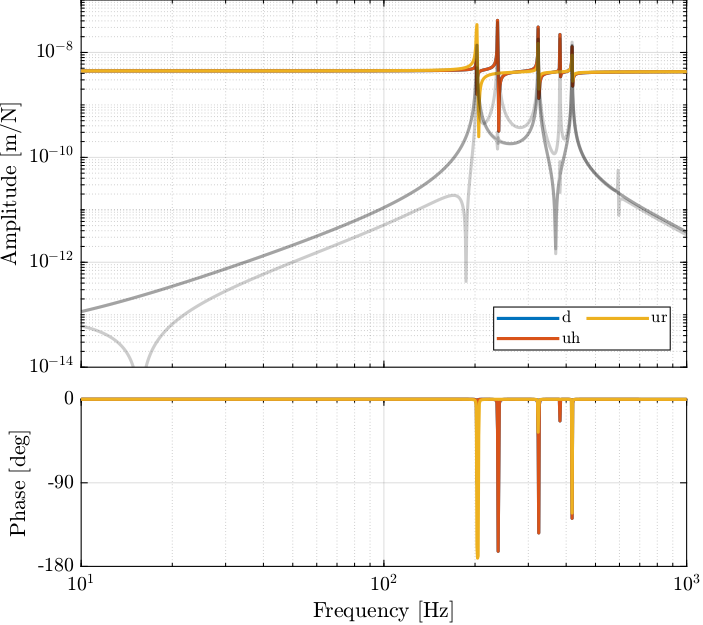
Figure 14: Bode Plot of the transfer functions from piezoelectric forces to strain gauges measuremed displacements
As the distance between the poles and zeros in Figure 17 is very small, little damping can be actively added using the strain gauges. This will be confirmed using a Root Locus plot.
4.2. Relative Active Damping
Krad_g1 = eye(3)*s/(s^2/(2*pi*500)^2 + 2*s/(2*pi*500) + 1);
As can be seen in Figure 15, very little damping can be added using relative damping strategy using strain gauges.
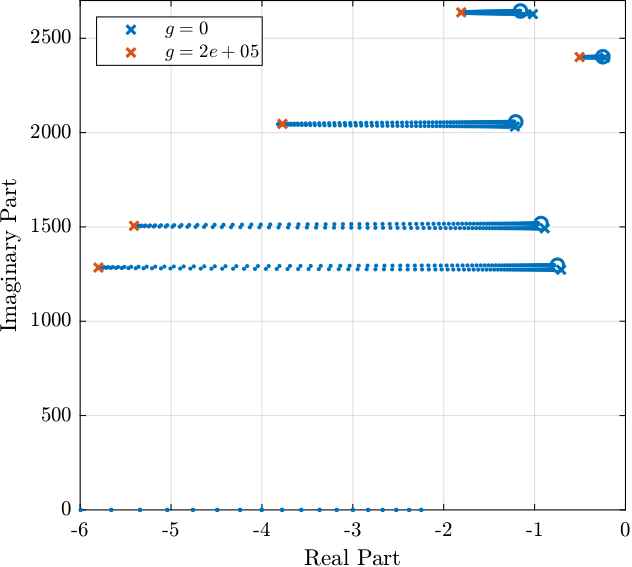
Figure 15: Root Locus for the relative damping control
Krad = -g*Krad_g1;
4.3. Damped Plant
The controller is implemented on Simscape, and the damped plant is identified.
%% Input/Output definition clear io; io_i = 1; %% Inputs % Control Input {3x1} [N] io(io_i) = linio([mdl, '/control_system'], 1, 'input'); io_i = io_i + 1; %% Outputs % Force Sensor {3x1} [m] io(io_i) = linio([mdl, '/DCM'], 1, 'openoutput'); io_i = io_i + 1;
%% DCM Kinematics load('dcm_kinematics.mat');
%% Identification of the Open Loop plant controller.type = 0; % Open Loop G_ol = J_a_111*inv(J_s_111)*linearize(mdl, io); G_ol.InputName = {'u_ur', 'u_uh', 'u_d'}; G_ol.OutputName = {'d_ur', 'd_uh', 'd_d'};
%% Identification of the damped plant with Relative Active Damping controller.type = 2; % RAD G_dp = J_a_111*inv(J_s_111)*linearize(mdl, io); G_dp.InputName = {'u_ur', 'u_uh', 'u_d'}; G_dp.OutputName = {'d_ur', 'd_uh', 'd_d'};
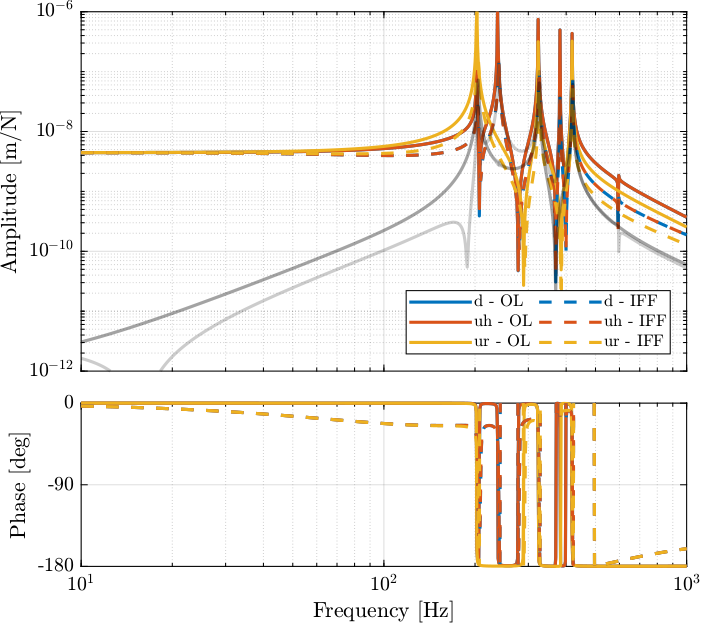
Figure 16: Bode plot of both the open-loop plant and the damped plant using relative active damping
5. Active Damping Plant (Force Sensors)
Force sensors are added above the piezoelectric actuators. They can consists of a simple piezoelectric ceramic stack. See for instance fleming10_integ_strain_force_feedb_high.
5.1. Identification
%% Input/Output definition clear io; io_i = 1; %% Inputs % Control Input {3x1} [N] io(io_i) = linio([mdl, '/control_system'], 1, 'openinput'); io_i = io_i + 1; %% Outputs % Force Sensor {3x1} [m] io(io_i) = linio([mdl, '/DCM'], 3, 'openoutput'); io_i = io_i + 1;
%% Extraction of the dynamics
G_fs = linearize(mdl, io);
The Bode plot of the identified dynamics is shown in Figure 17. At high frequency, the diagonal terms are constants while the off-diagonal terms have some roll-off.
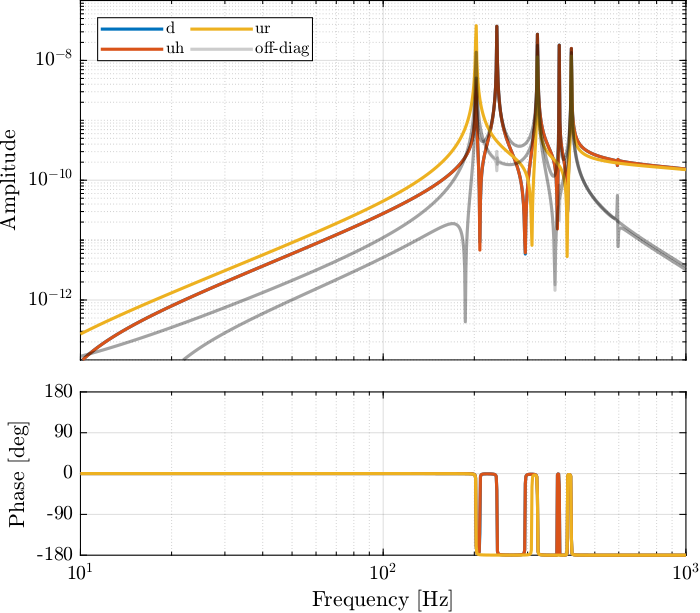
Figure 17: Bode plot of IFF Plant
5.2. Controller - Root Locus
We want to have integral action around the resonances of the system, but we do not want to integrate at low frequency. Therefore, we can use a low pass filter.
%% Integral Force Feedback Controller Kiff_g1 = eye(3)*1/(1 + s/2/pi/20);
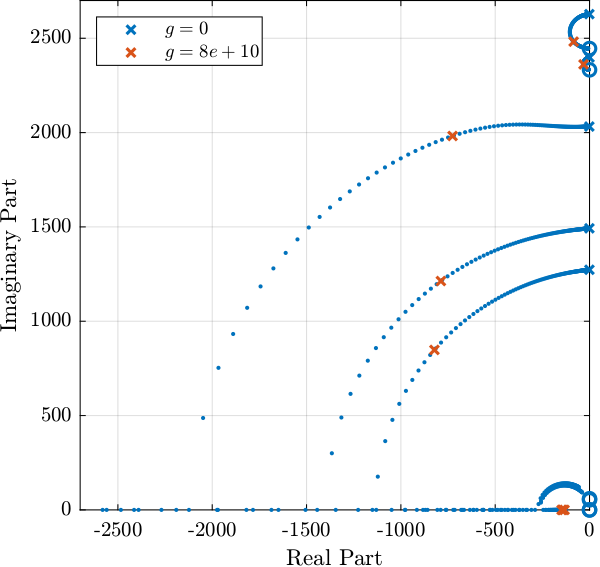
Figure 18: Root Locus plot for the IFF Control strategy
%% Integral Force Feedback Controller with optimal gain Kiff = g*Kiff_g1;
%% Save the IFF controller save('mat/Kiff.mat', 'Kiff');
5.3. Damped Plant
Both the Open Loop dynamics (see Figure 9) and the dynamics with IFF (see Figure 19) are identified.
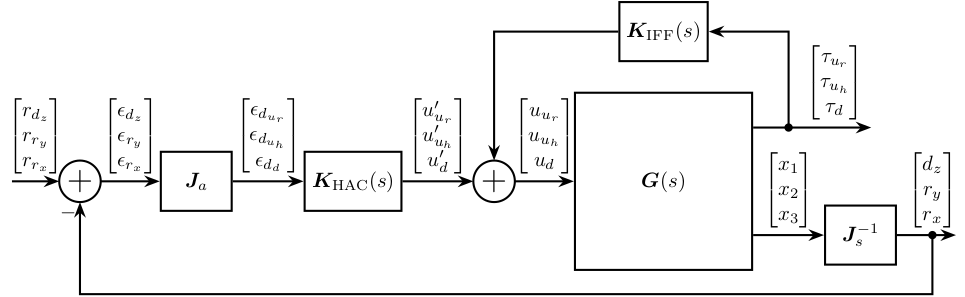
We are here interested in the dynamics from \(\bm{u}^\prime = [u_{u_r}^\prime,\ u_{u_h}^\prime,\ u_d^\prime]\) (input of the damped plant) to \(\bm{d}_{\text{fj}} = [d_{u_r},\ d_{u_h},\ d_d]\) (motion of the crystal expressed in the frame of the fast-jacks). This is schematically represented in Figure 19.
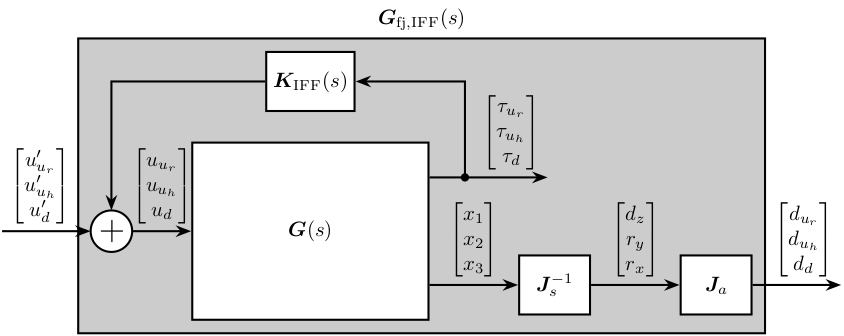
Figure 19: Use of Jacobian matrices to obtain the system in the frame of the fastjacks
The dynamics from \(\bm{u}\) to \(\bm{d}_{\text{fj}}\) (open-loop dynamics) and from \(\bm{u}^\prime\) to \(\bm{d}_{\text{fs}}\) are compared in Figure 20. It is clear that the Integral Force Feedback control strategy is very effective in damping the resonances of the plant.
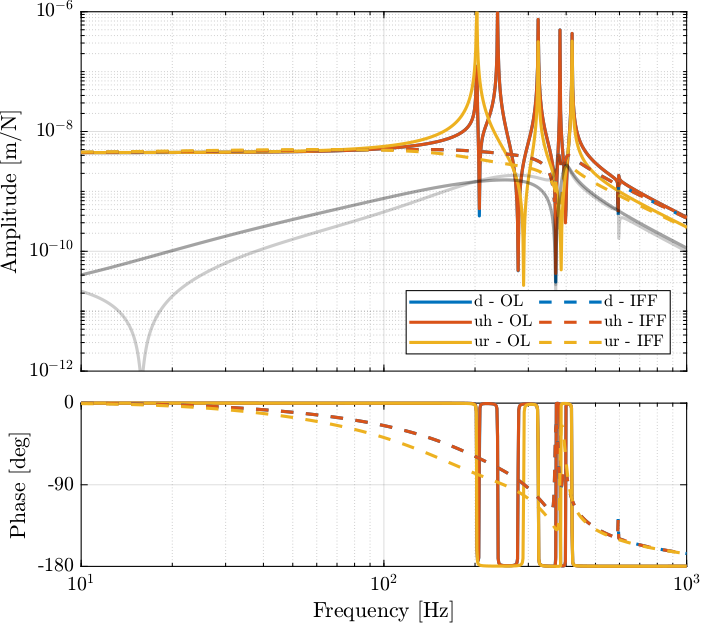
Figure 20: Bode plot of both the open-loop plant and the damped plant using IFF
The Integral Force Feedback control strategy is very effective in damping the modes present in the plant.
6. HAC-LAC (IFF) architecture
6.1. System Identification
Let’s identify the damped plant.
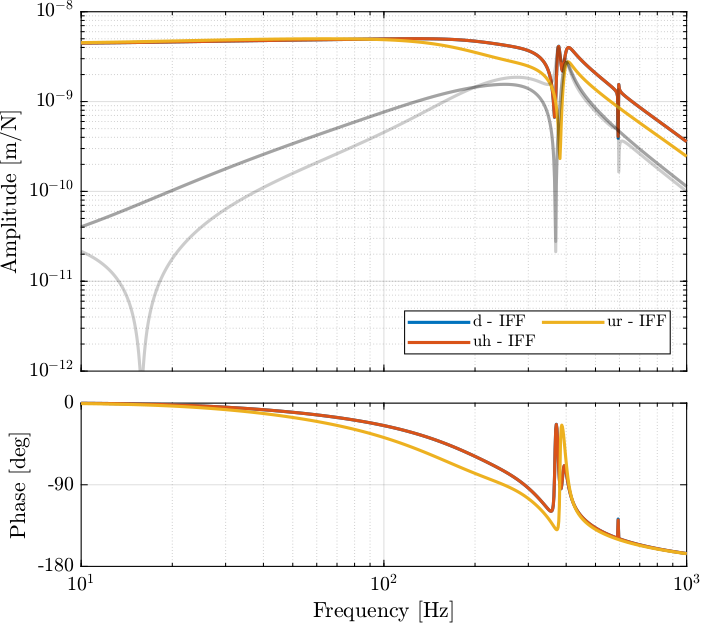
Figure 22: Bode Plot of the plant for the High Authority Controller (transfer function from \(\bm{u}^\prime\) to \(\bm{\epsilon}_d\))
6.2. High Authority Controller
Let’s design a controller with a bandwidth of 100Hz. As the plant is well decoupled and well approximated by a constant at low frequency, the high authority controller can easily be designed with SISO loop shaping.
%% Controller design wc = 2*pi*100; % Wanted crossover frequency [rad/s] a = 2; % Lead parameter Khac = diag(1./diag(abs(evalfr(G_dp, 1j*wc)))) * ... % Diagonal controller wc/s * ... % Integrator 1/(sqrt(a))*(1 + s/(wc/sqrt(a)))/(1 + s/(wc*sqrt(a))) * ... % Lead 1/(s^2/(4*wc)^2 + 2*s/(4*wc) + 1); % Low pass filter
%% Save the HAC controller save('mat/Khac_iff.mat', 'Khac');
%% Loop Gain L_hac_lac = G_dp * Khac;
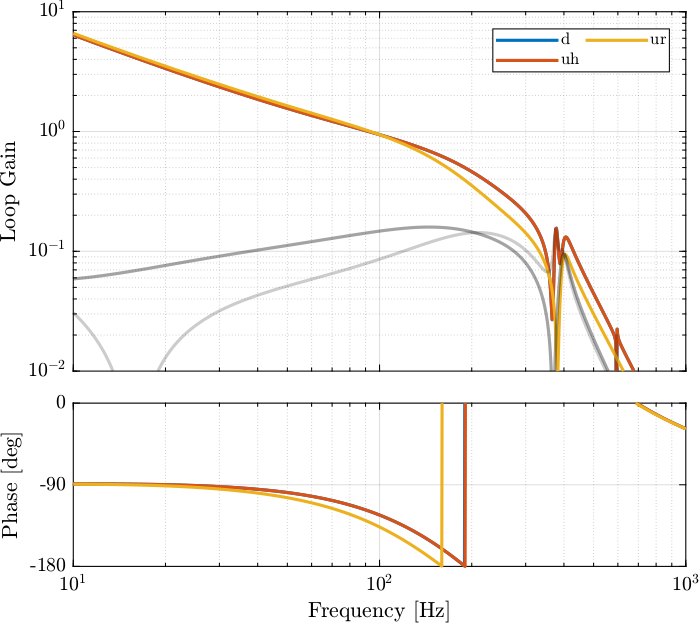
Figure 23: Bode Plot of the Loop gain for the High Authority Controller
As shown in the Root Locus plot in Figure 24, the closed loop system should be stable.
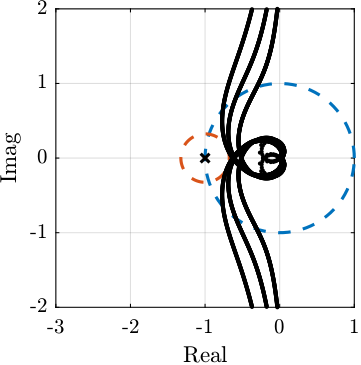
Figure 24: Root Locus for the High Authority Controller
6.3. Performances
In order to estimate the performances of the HAC-IFF control strategy, the transfer function from motion errors of the stepper motors to the motion error of the crystal is identified both in open loop and with the HAC-IFF strategy.
It is first verified that the closed-loop system is stable:
isstable(T_hl)
1
And both transmissibilities are compared in Figure 25.
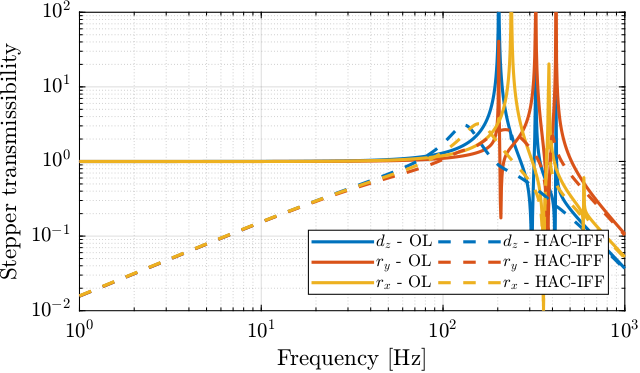
Figure 25: Comparison of the transmissibility of errors from vibrations of the stepper motor between the open-loop case and the hac-iff case.
The HAC-IFF control strategy can effectively reduce the transmissibility of the motion errors of the stepper motors. This reduction is effective inside the bandwidth of the controller.
6.4. Close Loop noise budget
Let’s compute the amplitude spectral density of the jack motion errors due to the sensor noise, the actuator noise and disturbances.
%% Computation of ASD of contribution of inputs to the closed-loop motion % Error due to disturbances asd_d = abs(squeeze(freqresp(Wd*(1/(1 + G_dp(1,1)*Khac(1,1))), f, 'Hz'))); % Error due to actuator noise asd_u = abs(squeeze(freqresp(Wu*(G_dp(1,1)/(1 + G_dp(1,1)*Khac(1,1))), f, 'Hz'))); % Error due to sensor noise asd_n = abs(squeeze(freqresp(Wn*(G_dp(1,1)*Khac(1,1)/(1 + G_dp(1,1)*Khac(1,1))), f, 'Hz')));
The closed-loop ASD is then:
%% ASD of the closed-loop motion asd_cl = sqrt(asd_d.^2 + asd_u.^2 + asd_n.^2);
The obtained ASD are shown in Figure 26.
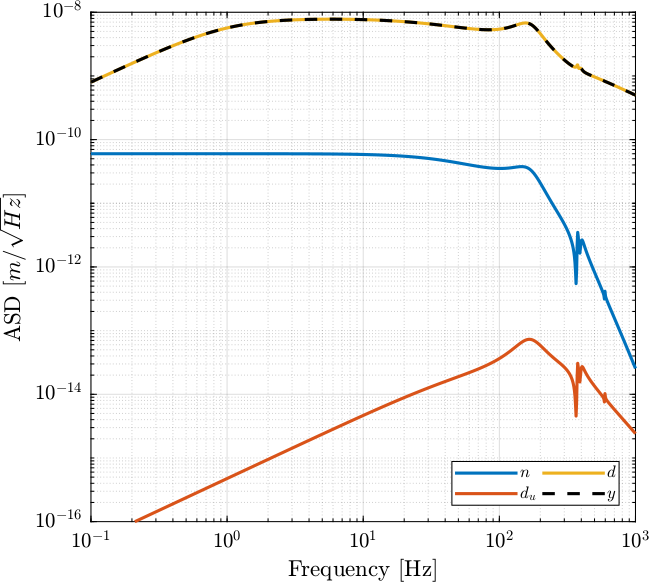
Figure 26: Closed Loop noise budget
Let’s compare the open-loop and close-loop cases (Figure 27).
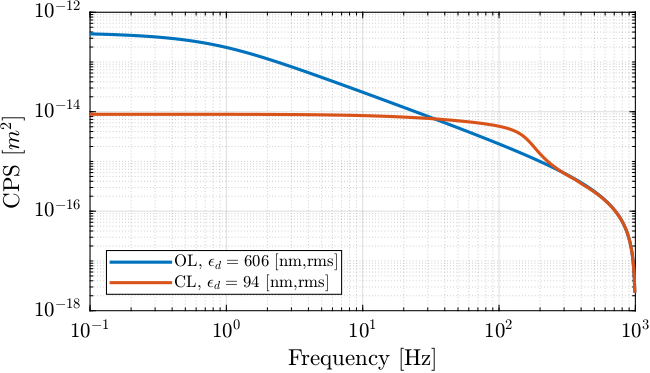
Figure 27: Cumulative Power Spectrum of the open-loop and closed-loop motion error along one fast-jack